Semi-Autonomous Vehicles as a Cognitive Assistive Device for Older Adults

 , ,
, ,
Abstract
:1. Impact of Aging on Driving
2. Vehicle Autonomy
2.1. Current Semi-Autonomous Vehivle (SAV) Features
2.2. Technology Benefits
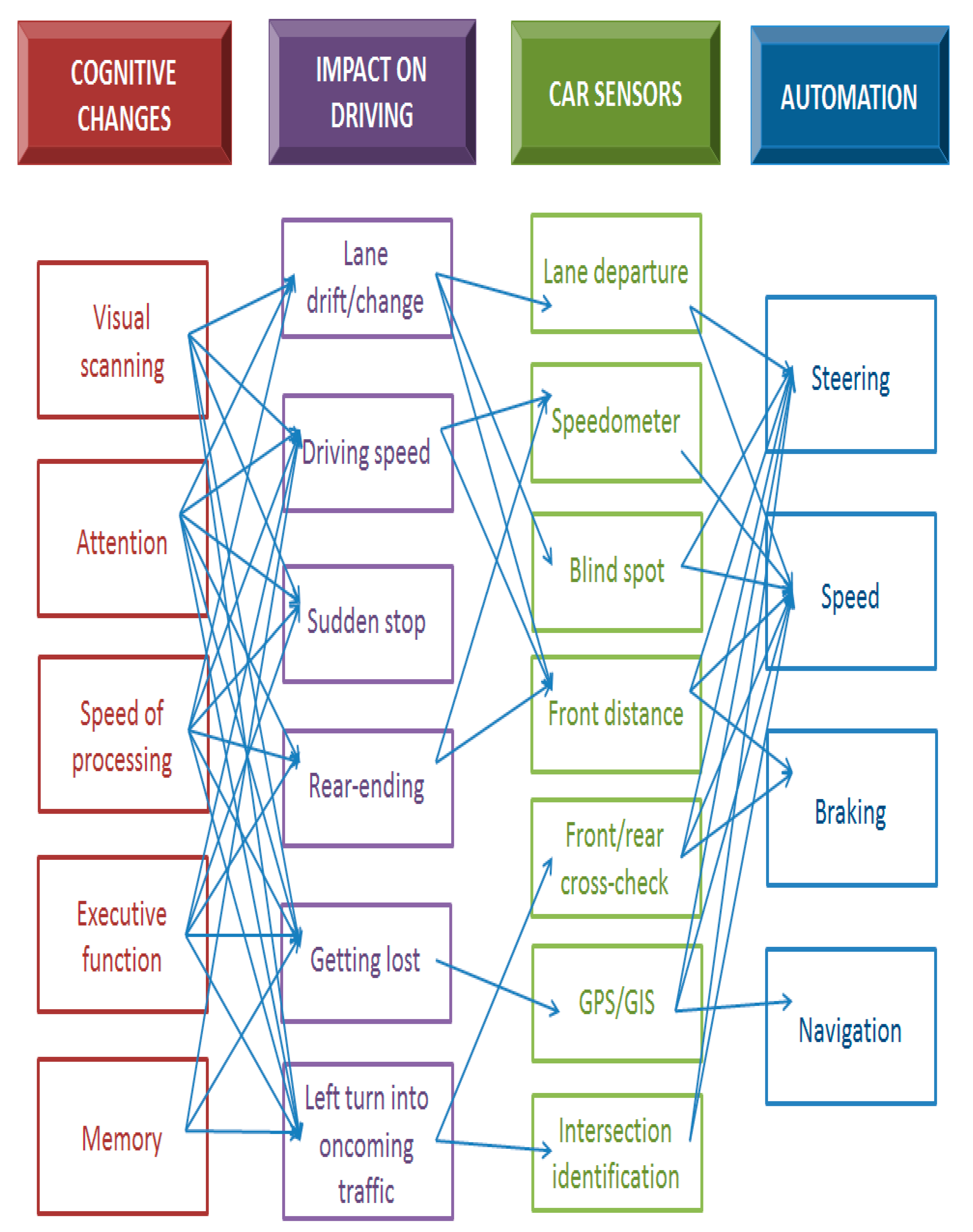
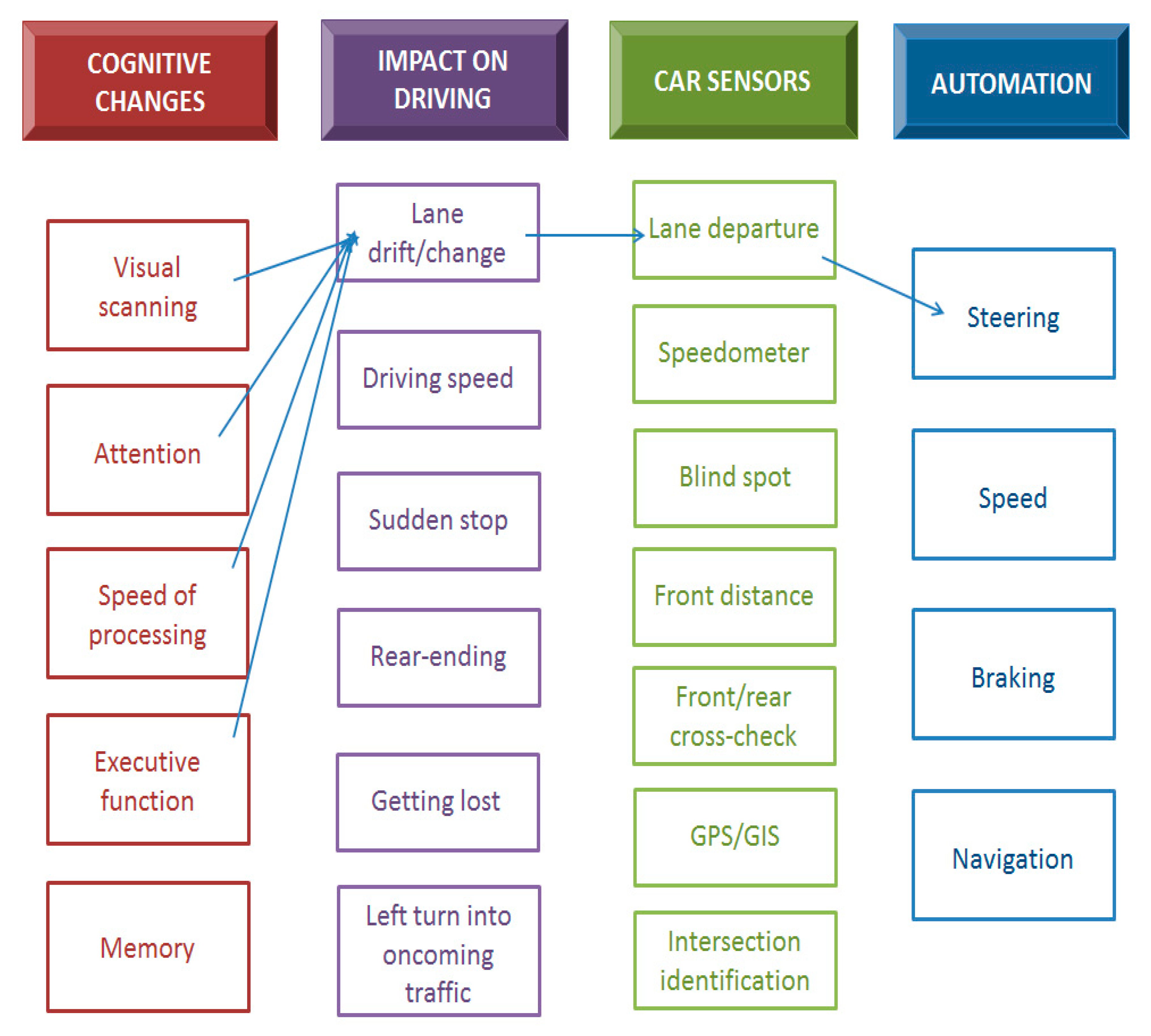
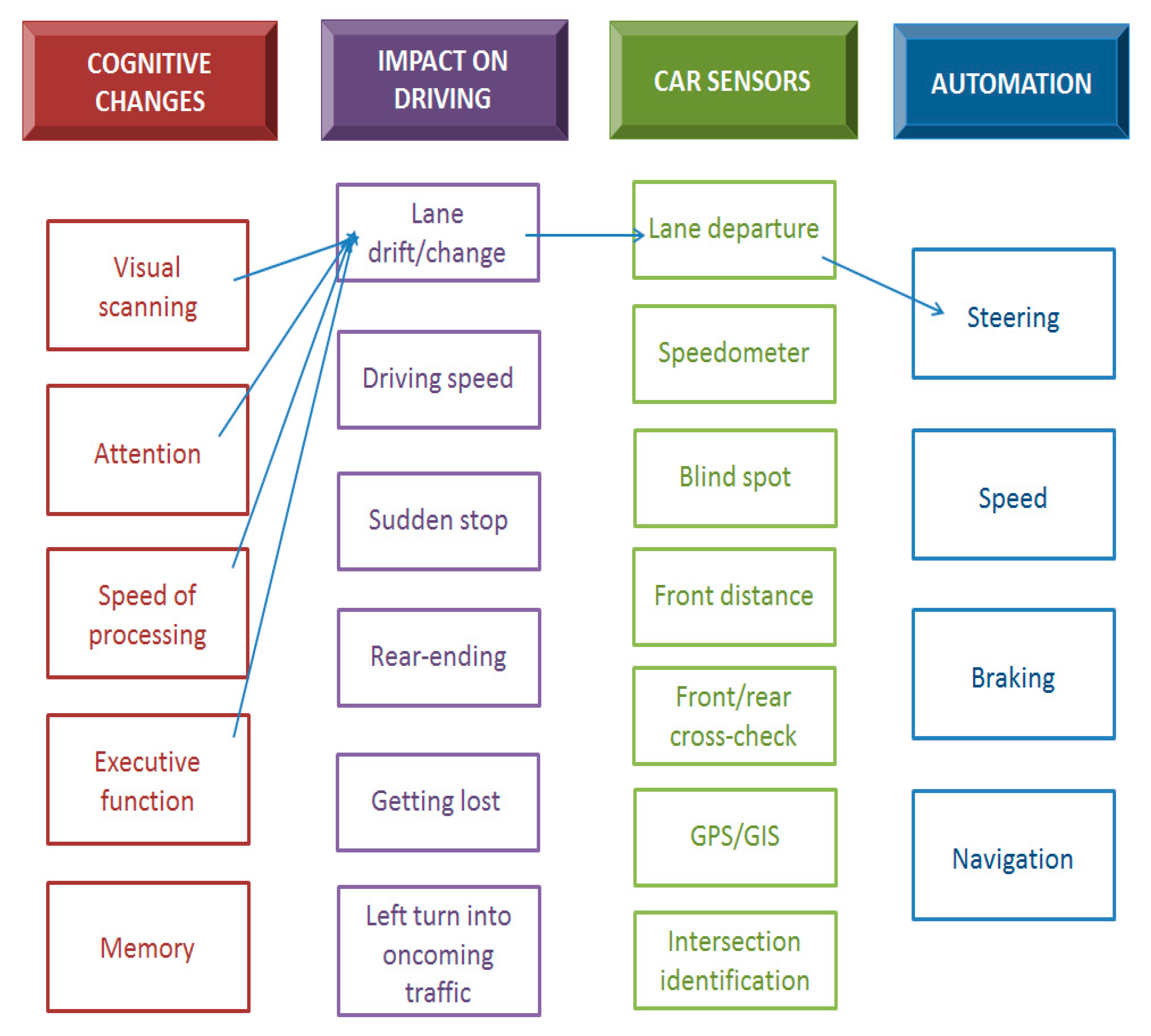
3. Proposed Model of How to Connect Needs of OA to SAV
4. Human Computer Interaction
5. Challenges
5.1. Technology
5.1.1. Vehicle Costs
5.1.2. Safety
5.1.3. Litigation, Liability, and Ethics
5.1.4. Privacy
5.2. Older Drivers Adapting to SAV
5.3. Adapting SAV to Older Drivers
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Souders, D.; Charness, N. Challenges of Older Drivers’ Adoption of Advanced Driver Assistance Systems and Autonomous Vehicles. In Human Aspects of IT for the Aged Population Healthy and Active Aging; Lecture Notes in Computer Science; Zhou, J., Salvendy, G., Eds.; Springer International Publishing Switzerland: Cham, Switzerland, 2016; Volume 9755, pp. 428–440. [Google Scholar]
- Passarino, G.; De Rango, F.; Montesanto, A. Human longevity: Genetics or Lifestyle? It takes two to tango. Immun. Ageing 2016, 13, 12. [Google Scholar] [CrossRef]
- Roelfsema, P.R.; Holtmaat, A. Control of synaptic plasticity in deep cortical networks. Nat. Rev. Neurosci. 2018, 19, 166. [Google Scholar] [CrossRef] [PubMed]
- Oschwald, J.; Guye, S.; Liem, F.; Rast, P.; Willis, S.; Röcke, C.; Jäncke, L.; Martin, M.; Mérillat, S. Brain structure and cognitive ability in healthy aging: A review on longitudinal correlated change. Rev. Neurosci. 2019. Available online: https://www.degruyter.com/view/j/revneuro.ahead-of-print/revneuro-2018-0096/revneuro-2018-0096.xml (accessed on 8 November 2019). [CrossRef] [PubMed]
- Bennett, J.M.; Chekaluk, E.; Batchelor, J. Cognitive Tests and Determining Fitness to Drive in Dementia: A Systematic Review. J. Am. Geriatr. Soc. 2016, 64, 1904–1917. [Google Scholar] [CrossRef] [PubMed]
- Anstey, K.J.; Wood, J.; Lord, S.; Walker, J.G. Cognitive, sensory and physical factors enabling driving safety in older adults. Clin. Psychol. Rev. 2005, 25, 45–65. [Google Scholar] [CrossRef]
- Circelli, K.S.; Clark, U.S.; Cronin-Golomb, A. Visual scanning patterns and executive function in relation to facial emotion recognition in aging. Neuropsychol. Dev. Cogn. B Aging Neuropsychol. Cogn. 2013, 20, 148–173. [Google Scholar] [CrossRef]
- Müller-Oehring, E.M.; Schulte, T.; Rohlfing, T.; Pfefferbaum, A.; Sullivan, E.V. Visual search and the aging brain: Discerning the effects of age-related brain volume shrinkage on alertness, feature binding, and attentional control. Neuropsychology 2013, 27, 48–59. [Google Scholar] [CrossRef]
- Bao, S.; Boyle, L.N. Age-related differences in visual scanning at median-divided highway intersections in rural areas. Accid. Anal. Prev. 2009, 41, 146–152. [Google Scholar] [CrossRef]
- Bédard, M.; Leonard, E.; McAuliffe, J.; Weaver, B.; Gibbons, C.; Dubois, S. Visual Attention and Older Drivers: The Contribution of Inhibition of Return to Safe Driving. Exp. Aging Res. 2006, 32, 119–135. [Google Scholar] [CrossRef]
- Regan, M.A.; Hallett, C.; Gordon, C.P. Driver distraction and driver inattention: Definition, relationship and taxonomy. Accid Anal. Prev. 2011, 43, 1771–1781. [Google Scholar] [CrossRef]
- Montes, S.A.; Introzzi, I.M.; Ledesma, R.D.; López, S.S. Selective Attention and Error Proneness while Driving: Research Using a Conjunctive Visual Search Task. Av. Psicol. Latinoam. 2016, 34, 195–203. [Google Scholar] [CrossRef]
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data; Report No. DOT HS 810 594; National Highway Traffic Safety Administration: Washington, DC, USA, April 2006. Available online: https://scinapse.io/papers/116278252 (accessed on 17 September 2019).
- Yang, J.; Coughlin, J.F. In-vehicle technology for self-driving cars: Advantages and challenges for aging drivers. Int. J. Autom. Technol. 2014, 15, 333–340. [Google Scholar] [CrossRef]
- Jastrzembski, T.S.; Charness, N. The Model Human Processor and the older adult: Parameter estimation and validation within a mobile phone task. J. Exp. Psychol. Appl. 2007, 13, 224–248. [Google Scholar] [CrossRef] [PubMed]
- Ball, K.K.; Roenker, D.L.; Wadley, V.G.; Edwards, J.D.; Roth, D.L.; McGwin, G., Jr.; Raleigh, R.; Joyce, J.J.; Cissell, G.M.; Dube, T. Can High-Risk Older Drivers Be Identified Through Performance-Based Measures in a Department of Motor Vehicles Setting? J. Am. Geriatr. Soc. 2006, 54, 77–84. [Google Scholar] [CrossRef] [PubMed]
- Michon, J.A. A Critical View of Driver Behavior Models: What Do We Know, What Should We Do? In Human Behavior and Traffic Safety; Evans, L., Schwing, R.C., Eds.; Springer: Boston, MA, USA, 1985; pp. 485–520. [Google Scholar]
- Eby, D.W.; Molnar, L.J. Cognitive impairment and driving safety. PTW Cogn. Impair. Driv. Saf. 2012, 49, 261–262. [Google Scholar] [CrossRef] [PubMed]
- Normal Aging vs. Dementia. Alzeihmer Society Canada. 2018. Available online: https://alzheimer.ca/en/Home/About-dementia/What-is-dementia/Normal-aging-vs-dementia?p=1 (accessed on 17 September 2019).
- Staplin, L.; Lococo, K.H.; Martell, C.; Stutts, J. Taxonomy of Older Driver Behaviors and Crash Risk. National Highway Traffic Safety, 2012. Available online: https://www.google.com/search?q=Taxonomy+of+Older+Driver+Behaviors+and+Crash+Risk&rlz=1C1GGRV_enCA810CA810&oq=Taxonomy+of+Older+Driver+Behaviors+and+Crash+Risk&aqs=chrome..69i57j69i61.671j0j4&sourceid=chrome&ie=UTF-8# (accessed on 9 September 2019).
- Classen, S.; Shechtman, O.; Awadzi, K.D.; Joo, Y.; Lanford, D.N. Traffic Violations Versus Driving Errors of Older Adults: Informing Clinical Practice. Am. J. Occup. Ther. 2010, 64, 233–241. [Google Scholar] [CrossRef]
- Casutt, G.; Martin, M.; Keller, M.; Jäncke, L. The relation between performance in on-road driving, cognitive screening and driving simulator in older healthy drivers. Transp. Res. Part F Traffic Psychol. Behav. 2014, 22, 232–244. [Google Scholar] [CrossRef]
- Casutt, G.; Theill, N.; Martin, M.; Keller, M.; Jäncke, L. The drive-wise project: Driving simulator training increases real driving performance in healthy older drivers. Front. Aging Neurosci. 2014, 6, 85. [Google Scholar] [CrossRef]
- Mezuk, B.; Rebok, G.W. Social Integration and Social Support Among Older Adults Following Driving Cessation. J. Gerontol. Ser. B 2008, 63, S298–S303. [Google Scholar] [CrossRef]
- Curl, A.L.; Stowe, J.D.; Cooney, T.M.; Proulx, C.M. Giving Up the Keys: How Driving Cessation Affects Engagement in Later Life. Gerontologist 2013, 54, 423–433. [Google Scholar] [CrossRef]
- Adler, G.; Rottunda, S. Older adults’ perspectives on driving cessation. J. Aging Stud. 2006, 20, 227–235. [Google Scholar] [CrossRef]
- Al-Hassani, S.B.; Alotaibi, N.M. The Impact of Driving Cessation on Older Kuwaiti Adults: Implications to Occupational Therapy. Occup. Ther. Health Care 2014, 28, 264–276. [Google Scholar] [CrossRef] [PubMed]
- Chihuri, S.; Mielenz, T.J.; DiMaggio, C.J.; Betz, M.E.; DiGuiseppi, C.; Jones, V.C.; Li, G. Driving cessation and health outcomes in older adults. J. Am. Geriatr. Soc. 2016, 64, 332–341. [Google Scholar] [CrossRef] [PubMed]
- Yamin, S.; Stinchcombe, A.; Gagnon, S. Deficits in attention and visual processing but not global cognition predict simulated driving errors in drivers diagnosed with mild Alzheimer’s disease. Am. J. Alzheimers Dis. Other Demen. 2016, 31, 351–360. [Google Scholar] [CrossRef] [PubMed]
- McCall, R.; McGee, F.; Mirnig, A.; Meschtscherjakov, A.; Louveton, N.; Engel, T.; Tscheligi, M. A taxonomy of autonomous vehicle handover situations. Transp. Res. Part Policy Pract. 2019, 124, 507–522. [Google Scholar] [CrossRef]
- Van Brummelen, J.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous vehicle perception: The technology of today and tomorrow. Transp. Res. Part C Emerg. Technol. 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three Decades of Driver Assistance Systems: Review and Future Perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Vanholme, B.; Gruyer, D.; Lusetti, B.; Glaser, S.; Mammar, S. Highly Automated Driving on Highways Based on Legal Safety. IEEE Trans. Intell. Transp. Syst. 2013, 14, 333–347. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part Policy Pract 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Davies, A. Don’t Overestimate the ‘Semi’ in Semiautonomous Cars. Wired 29 May 2019. Available online: https://www.wired.com/story/dont-overestimate-semi-semi-autonomous-cars/ (accessed on 9 September 2019).
- BMW Develops Health-Check Steering Wheel to Monitor Physical and Emotional Duress. MassDevice 4 November 2011. Available online: https://www.massdevice.com/bmw-develops-health-check-steering-wheel-monitor-physical-and-emotional-duress-massdevicecom-ca/ (accessed on 9 September 2019).
- Hsu, J. Seatbelt Sensors to Fight Drowsy Driving; A Smart Seatbelt and Car Seat System Can Detect Drowsy Drivers Based on Heartbeat and Breathing Rhythm. IEEE SPECTRUM. 24 July 2014. Available online: https://spectrum.ieee.org/cars-that-think/transportation/safety/buckle-up-for-a-smart-car-that-monitors-heartbeats (accessed on 9 September 2019).
- Harper, C.D.; Hendrickson, C.T.; Mangones, S.; Samaras, C. Estimating potential increases in travel with autonomous vehicles for the non-driving, elderly and people with travel-restrictive medical conditions. Transp. Res. Part C Emerg. Technol. 2016, 72, 1–9. [Google Scholar] [CrossRef]
- National Highway Traffic Safety. National Motor Vehicle Crash Causation Survey, Report to Congress Springfield; Report No.: DOT HS 811 059; US Department of Transportation: Springfield, VA, USA, July 2008. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/811059 (accessed on 17 September 2019).
- Wadud, Z.; MacKenzie, D. Leiby P. Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. Part Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Insurance Institute for Highway Safety. New Estimates of Benefits of Crash Avoidance Features on Passenger Vehicles. Report No 0018-988X. May 2010, Volume 45. Available online: http://vrcpub2.iihs.org/iihs/news/statusreport/article/45/5/2 (accessed on 26 July 2019).
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860. [Google Scholar] [CrossRef]
- Anderson, J.M.; Kalra, N.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Guidance for Policymakers and Conclusion. In Autonomous Vehicle Technology: A Guide for Policymakers; RAND Corporation: Santa Monica, CA, USA, 2014; pp. 135–150. Available online: https://www.jstor.org/stable/10.7249/j.ctt5hhwgz.15 (accessed on 8 August 2019).
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute, March 2019. Available online: https://www.vtpi.org/avip.pdf (accessed on 8 August 2019).
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the U.S., the U.K., and Australia. Transp. Res. Inst. UMTRI 2014, 7, 103024. Available online: https://deepblue.lib.umich.edu/handle/2027.42/108384 (accessed on 26 July 2019).
- Koopman, P.; Wagner, M. Autonomous Vehicle Safety: An Interdisciplinary Challenge. IEEE Intell. Transp. Syst. Mag. 2017, 9, 90–96. [Google Scholar] [CrossRef]
- Seif, H.G.; Hu, X. Autonomous Driving in the iCity—HD Maps as a Key Challenge of the Automotive Industry. Engineering 2016, 2, 159–162. [Google Scholar] [CrossRef] [Green Version]
- Krisher, T.; Durbin, D.-A. Tesla Update Halts Automatic Steering if Driver Inattentive. 22 September 2016. Available online: https://phys.org/news/2016-09-tesla-halts-automatic-driver-inattentive.html (accessed on 2 March 2019).
- Hawkins, A.J. Everything You Need to Know about the Boeing 737 Max Airplane Crashes. The Verge. 22 March 2019. Available online: https://www.theverge.com/2019/3/22/18275736/boeing-737-max-plane-crashes-grounded-problems-info-details-explained-reasons (accessed on 2 March 2019).
- Lambert, F. Tesla Model 3 Driver again Dies in Crash with Trailer, Autopilot not Yet Ruled out. Electrek. 1 March 2019. Available online: https://electrek.co/2019/03/01/tesla-driver-crash-truck-trailer-autopilot/ (accessed on 22 March 2019).
- Robertson, R.D.; Meister, S.R.; Vanlaar, W.G.M.; Mainegra Hing, M. Automated vehicles and behavioural adaptation in Canada. Transp. Res. Part Policy Pract. 2017, 104, 50–57. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Robertson, R.D.; Meister, S.R.; Vanlaar, W.G.M. Automated Vehicles: Driver Knowledge, Attitudes, and Practices; Traffic Injury Research Foundation: Ottawa, ON, Canada, 2016; Available online: http://tirf.ca/publications/publications_show.php?pub_id=342 (accessed on 8 August 2019).
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Mehler, B.; Reimer, B.; Coughlin, J.F. Autonomous vehicles and alternatives to driving: Trust, preferences, and effects of age. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Clark, H.; Feng, J. Age differences in the takeover of vehicle control and engagement in non-driving-related activities in simulated driving with conditional automation. Accid. Anal. Prev. 2017, 106, 468–479. [Google Scholar] [CrossRef]
- Reimer, B. Driver Assistance Systems and the Transition to Automated Vehicles: A Path to Increase Older Adult Safety and Mobility? Public Policy Aging Rep. 2014, 24, 27–31. [Google Scholar] [CrossRef] [Green Version]
- Alessandrini, A.; Campagna, A.; Site, P.D.; Filippi, F.; Persia, L. Automated Vehicles and the Rethinking of Mobility and Cities. Transp. Res. Procedia 2015, 5, 145–160. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
| Level of Automation | Autonomous Features |
|---|---|
| Level 0: No automation |
|
| Level 1: Driver assistance |
|
| Level 2: Partial automation |
|
| Level 3: conditional automation |
|
| Level 4: High automation |
|
| Level 5: Full automation |
|
| Sensing Category | Description |
|---|---|
| Self-sensing | Vehicle uses proprioceptive sensors such as pre-installed measurement units (e.g., odometers, inertial measurement units (IMUs), gyroscopes, and controller area network (CAN) bus) to measure the current state of the ego-vehicle, including the vehicle’s wheel velocity, acceleration, rotational velocity, yaw, and steering angle. |
| Localization | Vehicle uses external sensors such as GPS or dead reckoning by IMU readings to determine the vehicle’s global and local position. |
| Surroundingsensing | Vehicle uses exteroceptive sensors to detect road markings, road slope, traffic signs, weather conditions, the state (position, velocity, acceleration, etc.) of obstacles including other vehicles, and even the state of the driver (vigilance, drowsiness, fatigue, boredom due to monotony, etc.). |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Knoefel, F.; Wallace, B.; Goubran, R.; Sabra, I.; Marshall, S. Semi-Autonomous Vehicles as a Cognitive Assistive Device for Older Adults. Geriatrics 2019, 4, 63. https://doi.org/10.3390/geriatrics4040063
Knoefel F, Wallace B, Goubran R, Sabra I, Marshall S. Semi-Autonomous Vehicles as a Cognitive Assistive Device for Older Adults. Geriatrics. 2019; 4(4):63. https://doi.org/10.3390/geriatrics4040063
Chicago/Turabian StyleKnoefel, Frank, Bruce Wallace, Rafik Goubran, Iman Sabra, and Shawn Marshall. 2019. "Semi-Autonomous Vehicles as a Cognitive Assistive Device for Older Adults" Geriatrics 4, no. 4: 63. https://doi.org/10.3390/geriatrics4040063