
Developing a Novel Integrated Generalised Data Envelopment Analysis (DEA) to Evaluate Hospitals Providing Stroke Care Services




Abstract
1. Introduction and Background
2. Background
- (a).
- Moving the optimisation part, Pareto frontier, close to the specified aspiration level.
- (b).
- Modifying the aspiration level according to the trade-off method.
3. Research Gaps, Contributions, and Flowchart
- This study presents an interactive GDEA model approach that overcomes the drawbacks of the previous approaches. The proposed interactive method is less complex than previous methods and does not require predetermined preference information.
- This paper presents an interactive GDEA model that employs the max-ordering approach and the STEM method. In other words, a relationship is established between the GDEA dual model and the MOLP problem, and it is demonstrated how a GDEA model can be evaluated interactively by converting to the MOLP problem using the max-ordering approach. The problem is then solved using an interactive approach based on MOLP. The STEM approach is used to consider the DM’s preferences in the decision-making process.
- While OR approaches can benefit the healthcare sector, there is a significant research gap in using OR tools such as DEA and MOLP in challenging healthcare issues, particularly in evaluating stroke care services. Furthermore, while the benefits of appropriate care services of stroke care patients have been highlighted in the literature, there is a limitation of using OR models to demonstrate the long-term benefits of more immediate access to various stroke care involvements on patients’ lifetime outcomes. As a result, one of the primary purposes of this study is to fill a critical research gap.
- A case study is used to evaluate the proposed approach. The results show that the proposed approach contributes new theoretical and practical insights to a growing body of knowledge about hospital strategies and implications for hospital planners, managers, and policymakers in countries where health centres are increasingly facing challenging issues, particularly in providing reliable services for stroke care.
4. Generalised Data Envelopment Analysis (GDEA)
- The DMUo is BCC-efficient if and only if for sufficiently large and positive α.
- The DMUo is CCR-efficient if and only if for sufficiently large and positive α and extra constraint should be added to the model (1).
- If α is sufficiently small and positive, then Equations (1)–(5) turn to the FDH model;
- If α is sufficiently large and positive, then Equations (1)–(5) turn to the BCC model;
- If α is a sufficiently large and positive and extra constraint is added to Equations (1)–(5), then the model turns to the CCR model.
5. The Dual Model of the GDEA
- Case 1. If α is sufficiently small and positive and , then Equations (7)–(14) turn to the FDH model.
- Case 2. If α is sufficiently large and positive and , then Equations (7)–(14) turn to the BCC model.
- Case 3. If α is sufficiently large and positive and , then Equations (7)–(14) turn to the CCR model.
- (a)
- (b)
- The slack variables are zero, i.e., and where is the origin in .
6. The Relationship between GDEA and MOLP
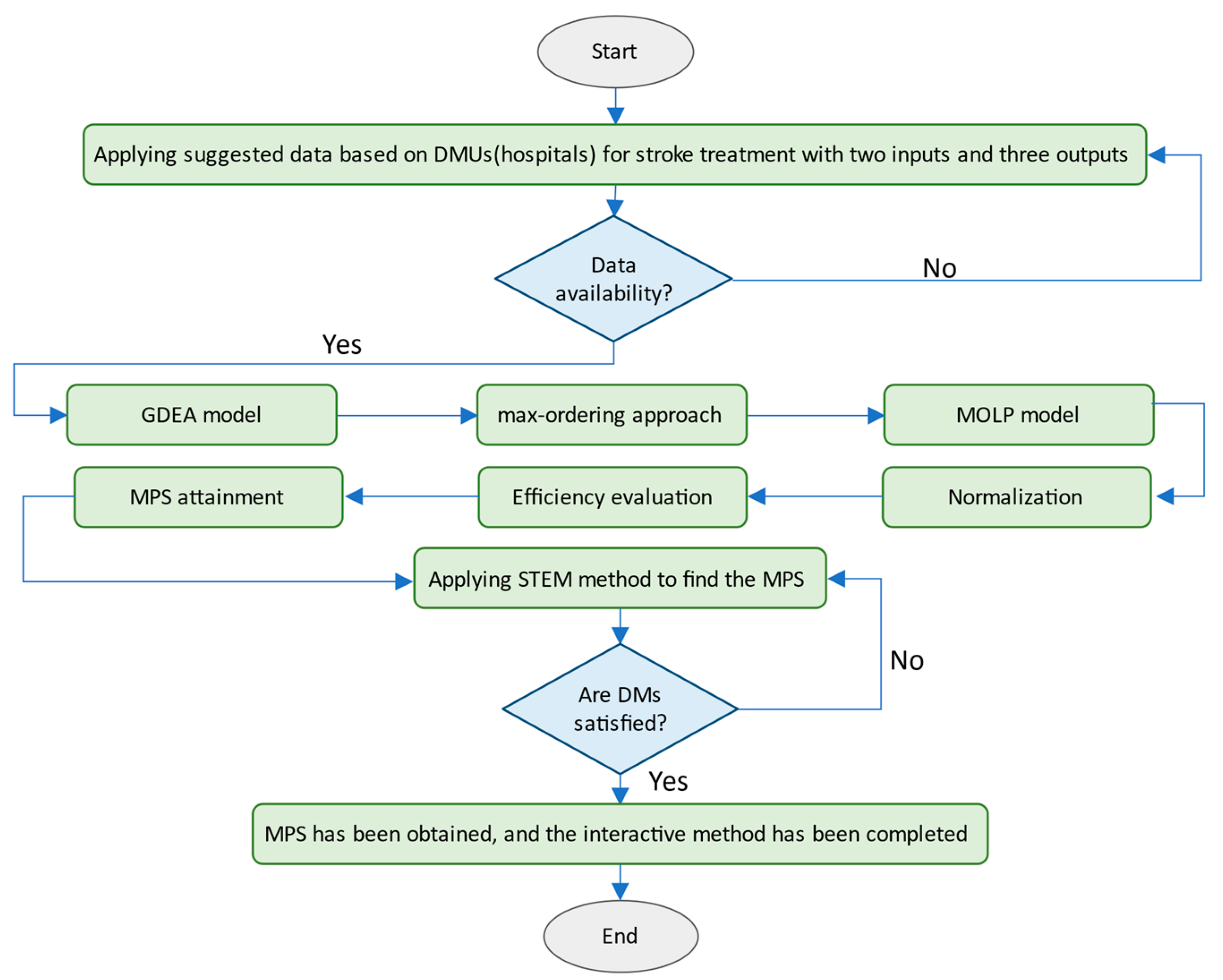
7. The Proposed Interactive GDEA Model
- Step 1—Normalisation: Since the range of data varies widely, normalisation transfers the range of data to scale the range in [0, 1].
- Step 2—Efficiency evaluation: The value of α and T, according to the type of GDEA models, can be represented as follows:
- (a)
- CCR: sufficiently large and positive α and T ≠ 0,
- (b)
- BCC: sufficiently large and positive α and T = 0,
- (c)
- FDH: sufficiently small and positive α and T = 0
- (d)
- The GDEA efficiency () of all units is evaluated using the GDEA dual Equations (7)–(14). Then, efficient and inefficient units are presented to DM.
- (e)
- If the DM is not satisfied with some of the inefficient DMUs, these DMUs will become efficient DMUs using the convex combination () obtained from Equations (7)–(14). The values of the inputs and outputs of these DMUs are provided to DM; since DM has not selected the outputs, we go to the next step.
- Step 3—MPS attainment: The dual GDEA model converts to the MOLP model for selected inefficient DMUo by DM Equations (34)–(36). If DM is not satisfied with the obtained output level based on Equations (34)–(36), go to the following section.
8. Interactive STEM Method
9. Numerical Example in Hospitals That Provide Stroke Care Services
- Step 1—Normalisation: The Euclidean norm is used for the normalisation of the data, and the results are presented in Table 3.
- Step 2—Efficiency evaluation: According to the FDH model of GDEA, the values of α and T are 1 and 0, respectively. Table 4 presents the efficiency results of the GDEAD Equations (7)–(14) for each unit of the hospital.
- Step 3—MPS attainment: The modified form of the GDEA dual model as MOLP (with three objects) for DMU 1 (Equations (34)–(36) is as follows:and are the components of the matrix and , that is replaced by zero, except for the highest component of vectors. max , max , …, . , , …, . , , …, . Additionally, the coefficients of the constraints ( are obtained as , …, and , …, . Then, the MOLP model is as:
10. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amiri, A. Nursing Graduates and Quality of Acute Hospital Care in 33 OECD Countries: Evidence from Generalized Linear Models and Data Envelopment Analysis. SAGE Open Nurs. 2021, 7, 23779608211005217. [Google Scholar] [CrossRef]
- Donkor, E.S. Stroke in the century: A snapshot of the burden, epidemiology, and quality of life. Stroke Res. Treat. 2018, 2018, 3238165. [Google Scholar]
- Churilov, L.; Fridriksdottir, A.; Keshtkaran, M.; Mosley, I.; Flitman, A.; Dewey, H.M. Decision support in pre-hospital stroke care operations: A case of using simulation to improve eligibility of acute stroke patients for thrombolysis treatment. Comput. Oper. Res. 2013, 40, 2208–2218. [Google Scholar] [CrossRef]
- Virani, S.S.; Alonso, A.; Benjamin, E.J.; Bittencourt, M.S.; Callaway, C.W.; Carson, A.P.; Chamberlain, A.M.; Chang, A.R.; Cheng, S.; Delling, F.N.; et al. Heart Disease and Stroke Statistics—2020 Update: A Report from the American Heart Association. Circulation 2020, 141, e139–e596. [Google Scholar] [CrossRef]
- Saver, J.L. Time is brain—Quantified. Stroke 2006, 37, 263–266. [Google Scholar] [CrossRef] [PubMed]
- Foundation, N.S. National Stroke Audit Acute Services Clinical Audit Report 2009; National Stroke Foundation: Melbourne, Australia, 2009. [Google Scholar]
- Aghapour, A.H.; Yazdani, M.; Jolai, F.; Mojtahedi, M. Capacity planning and reconfiguration for disaster-resilient health infrastructure. J. Build. Eng. 2019, 26, 100853. [Google Scholar] [CrossRef]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M.; Sanderson, D.; Dixit, V. Hospital evacuation modelling: A critical literature review on current knowledge and research gaps. Int. J. Disaster Risk Reduct. 2021, 66, 102627. [Google Scholar] [CrossRef]
- Khalili, S.M.; Babagolzadeh, M.; Yazdani, M.; Saberi, M.; Chang, E. A bi-objective model for relief supply location in post-disaster management. In Proceedings of 2016 International Conference on Intelligent Networking and Collaborative Systems (INCoS), Ostrava, Czech Republic, 7–9 September 2016; pp. 428–434. [Google Scholar]
- Yazdani, M.; Ghodsi, R. Invasive weed optimization algorithm for minimizing total weighted earliness and tardiness penalties on a single machine under aging effect. Int. Robot. Autom. J. 2017, 2, 1–5. [Google Scholar] [CrossRef][Green Version]
- Yazdani, M.; Jolai, F. A genetic algorithm with modified crossover operator for a two-agent scheduling problem. J. Syst. Manag. 2013, 1, 1–13. [Google Scholar]
- Yazdani, M.; Kabirifar, K.; Frimpong, B.E.; Shariati, M.; Mirmozaffari, M.; Boskabadi, A. Improving construction and demolition waste collection service in an urban area using a simheuristic approach: A case study in Sydney, Australia. J. Clean. Prod. 2021, 280, 124138. [Google Scholar] [CrossRef]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M. Enhancing evacuation response to extreme weather disasters using public transportation systems: A novel simheuristic approach. J. Comput. Des. Eng. 2020, 7, 195–210. [Google Scholar] [CrossRef]
- Morasaei, A.; Ghabussi, A.; Aghlmand, S.; Yazdani, M.; Baharom, S.; Assilzadeh, H. Simulation of steel–concrete composite floor system behavior at elevated temperatures via multi-hybrid metaheuristic framework. Eng. Comput. 2021, 1–16. [Google Scholar] [CrossRef]
- Yazdani, M.; Kabirifar, K.; Fathollahi-Fard, A.M.; Mojtahedi, M. Production scheduling of off-site prefabricated construction components considering sequence dependent due dates. Environ. Sci. Pollut. Res. 2021, 1–17. [Google Scholar] [CrossRef]
- Yazdani, M.; Khalili, S.M.; Babagolzadeh, M.; Jolai, F. A single-machine scheduling problem with multiple unavailability constraints: A mathematical model and an enhanced variable neighborhood search approach. J. Comput. Des. Eng. 2017, 4, 46–59. [Google Scholar] [CrossRef]
- Babagolzadeh, M.; Shrestha, A.; Abbasi, B.; Zhang, Y.; Woodhead, A.; Zhang, A. Sustainable cold supply chain management under demand uncertainty and carbon tax regulation. Transp. Res. Part D Transp. Environ. 2020, 80, 102245. [Google Scholar] [CrossRef]
- Ghafourian, K.; Kabirifar, K.; Mahdiyar, A.; Yazdani, M.; Ismail, S.; Tam, V.W. A Synthesis of Express Analytic Hierarchy Process (EAHP) and Partial Least Squares-Structural Equations Modeling (PLS-SEM) for Sustainable Construction and Demolition Waste Management Assessment: The Case of Malaysia. Recycling 2021, 6, 73. [Google Scholar] [CrossRef]
- Mohammadi, M.; Gheibi, M.; Fathollahi-Fard, A.M.; Eftekhari, M.; Kian, Z.; Tian, G. A hybrid computational intelligence approach for bioremediation of amoxicillin based on fungus activities from soil resources and aflatoxin B1 controls. J. Environ. Manag. 2021, 299, 113594. [Google Scholar] [CrossRef] [PubMed]
- Sohani, A.; Naderi, S.; Torabi, F. Comprehensive comparative evaluation of different possible optimization scenarios for a polymer electrolyte membrane fuel cell. Energy Convers. Manag. 2019, 191, 247–260. [Google Scholar] [CrossRef]
- Babagolzadeh, M.; Pirayesh, M.; Shrestha, A. Optimal delivery and replenishment policies for perishable products considering lost sale cost: An efficient hybrid algorithm. Int. J. Ind. Syst. Eng. 2021, 37, 306–333. [Google Scholar] [CrossRef]
- Naderi, S.; Banifateme, M.; Pourali, O.; Behbahaninia, A.; MacGill, I.; Pignatta, G. Accurate capacity factor calculation of waste-to-energy power plants based on availability analysis and design/off-design performance. J. Clean. Prod. 2020, 275, 123167. [Google Scholar] [CrossRef]
- Gheibi, M.; Eftekhari, M.; Tabrizi, M.; Fathollahi-Fard, A.; Tian, G. Mechanistic evaluation of cationic dyes adsorption onto low-cost calcinated aerated autoclaved concrete wastes. Int. J. Environ. Sci. Technol. 2021, 1–16. [Google Scholar] [CrossRef]
- Wang, W.; Tian, G.; Zhang, T.; Jabarullah, N.H.; Li, F.; Fathollahi-Fard, A.M.; Wang, D.; Li, Z. Scheme selection of design for disassembly (DFD) based on sustainability: A novel hybrid of interval 2-tuple linguistic intuitionistic fuzzy numbers and regret theory. J. Clean. Prod. 2021, 281, 124724. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W.; Rhodes, E. Measuring the efficiency of decision making units. Eur. J. Oper. Res. 1978, 2, 429–444. [Google Scholar] [CrossRef]
- Mirmozaffari, M.; Alinezhad, A. Ranking of Heart Hospitals Using cross-efficiency and two-stage DEA. In Proceedings of 2017 7th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 26–27 October 2017; pp. 217–222. [Google Scholar]
- Mirmozaffari, M.; Alinezhad, A. Window analysis using two-stage DEA in heart hospitals. In Proceedings of 10th International Conference on Innovations in Science, Engineering, Computers and Technology (ISECT-2017), Dubai, United Arab Emirates, 17–19 October 2017; pp. 44–51. [Google Scholar]
- Mirmozaffari, M.; Shadkam, E.; Khalili, S.M.; Kabirifar, K.; Yazdani, R.; Gashteroodkhani, T.A. A novel artificial intelligent approach: Comparison of machine learning tools and algorithms based on optimization DEA Malmquist productivity index for eco-efficiency evaluation. Int. J. Energy Sect. Manag. 2021, 15, 523–550. [Google Scholar] [CrossRef]
- Mirmozaffari, M.; Yazdani, R.; Shadkam, E.; Tavassoli, L.S.; Massah, R. VCS and CVS: New combined parametric and non-parametric operation research models. Sustain. Oper. Comput. 2021, 2, 36–56. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W. Management models and industrial applications of linear programming. Manag. Sci. 1957, 4, 38–91. [Google Scholar] [CrossRef]
- Jahanshahloo, G.R.; Foroughi, A.A. Efficiency analysis, generating an efficient extreme point for an MOLP, and some comparisons. Appl. Math. Comput. 2005, 162, 991–1005. [Google Scholar] [CrossRef]
- Korhonen, P.; Syrjänen, M. Resource allocation based on efficiency analysis. Manag. Sci. 2004, 50, 1134–1144. [Google Scholar] [CrossRef]
- Li, X.-B.; Reeves, G.R. A multiple criteria approach to data envelopment analysis. Eur. J. Oper. Res. 1999, 115, 507–517. [Google Scholar] [CrossRef]
- Quariguasi Frota Neto, J.; Angulo-Meza, L. Alternative targets for data envelopment analysis through multi-objective linear programming: Rio de Janeiro Odontological Public Health System Case Study. J. Oper. Res. Soc. 2007, 58, 865–873. [Google Scholar] [CrossRef]
- Belton, V.; Vickers, S.P. Demystifying DEA—A visual interactive approach based on multiple criteria analysis. J. Oper. Res. Soc. 1993, 44, 883–896. [Google Scholar]
- Belton, V.; Stewart, T.J. DEA and MCDA: Competing or complementary approaches? In Advances in Decision Analysis; Springer: Berlin/Heidelberg, Germany, 1999; pp. 87–104. [Google Scholar]
- Joro, T.; Korhonen, P.; Wallenius, J. Structural comparison of data envelopment analysis and multiple objective linear programming. Manag. Sci. 1998, 44, 962–970. [Google Scholar] [CrossRef]
- Stewart, T.J. Relationships between Data Envelopment Analysis and Multicriteria Decision Analysis. J. Oper. Res. Soc. 1996, 47, 654–665. [Google Scholar] [CrossRef]
- Estellita Lins, M.P.; Angulo-Meza, L.; Moreira Da Silva, A.C. A multi-objective approach to determine alternative targets in data envelopment analysis. J. Oper. Res. Soc. 2004, 55, 1090–1101. [Google Scholar] [CrossRef]
- Hong, J.-D.; Jeong, K.-Y. Combining data envelopment analysis and multi-objective model for the efficient facility location–allocation decision. J. Ind. Eng. Int. 2019, 15, 315–331. [Google Scholar] [CrossRef]
- Azadeh, A.; Sheikhalishahi, M.; Firoozi, M.; Khalili, S. An integrated multi-criteria Taguchi computer simulation-DEA approach for optimum maintenance policy and planning by incorporating learning effects. Int. J. Prod. Res. 2013, 51, 5374–5385. [Google Scholar] [CrossRef]
- Azadeh, A.; Sheikhalishahi, M.; Khalili, S.M.; Firoozi, M. An integrated fuzzy simulation–fuzzy data envelopment analysis approach for optimum maintenance planning. Int. J. Comput. Integr. Manuf. 2014, 27, 181–199. [Google Scholar] [CrossRef]
- Shadkam, E.; Bijari, M. Multi-objective simulation optimization for selection and determination of order quantity in supplier selection problem under uncertainty and quality criteria. Int. J. Adv. Manuf. Technol. 2017, 93, 161–173. [Google Scholar] [CrossRef]
- Yun, Y.; Nakayama, H. Generalized data envelopment analysis and computational intelligence in multiple criteria decision making. In Multicriteria Decision Aid and Artificial Intelligence: Links, Theory and Applications; Doumpos, M., Grigoroudis, E., Eds.; Wiley: Hoboken, NJ, USA, 2013; pp. 209–233. [Google Scholar]
- Tavana, M.; Ebrahimnejad, A.; Santos-Arteaga, F.J.; Mansourzadeh, S.M.; Matin, R.K. A hybrid DEA-MOLP model for public school assessment and closure decision in the City of Philadelphia. Socio-Econ. Plan. Sci. 2018, 61, 70–89. [Google Scholar] [CrossRef]
- Allen, R.; Athanassopoulos, A.; Dyson, R.G.; Thanassoulis, E. Weights restrictions and value judgements in data envelopment analysis: Evolution, development and future directions. Ann. Oper. Res. 1997, 73, 13–34. [Google Scholar] [CrossRef]
- Wong, Y.-H.; Beasley, J. Restricting weight flexibility in data envelopment analysis. J. Oper. Res. Soc. 1990, 41, 829–835. [Google Scholar] [CrossRef]
- Golany, B.; Roll, Y.; Rybak, D. Measuring efficiency of power plants in Israel by data envelopment analysis. IEEE Trans. Eng. Manag. 1994, 41, 291–301. [Google Scholar] [CrossRef]
- Thompson, R.G.; Langemeier, L.N.; Lee, C.-T.; Lee, E.; Thrall, R.M. The role of multiplier bounds in efficiency analysis with application to Kansas farming. J. Econom. 1990, 46, 93–108. [Google Scholar] [CrossRef]
- Athanassopoulos, A.D. Decision support for target-based resource allocation of public services in multiunit and multilevel systems. Manag. Sci. 1998, 44, 173–187. [Google Scholar] [CrossRef]
- Dyson, R.G.; Thanassoulis, E. Reducing weight flexibility in data envelopment analysis. J. Oper. Res. Soc. 1988, 39, 563–576. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W.; Huang, Z.M.; Sun, D.B. Polyhedral cone-ratio DEA models with an illustrative application to large commercial banks. J. Econom. 1990, 46, 73–91. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.; Lewin, A.Y.; Seiford, L.M. Data envelopment analysis theory, methodology and applications. J. Oper. Res. Soc. 1997, 48, 332–333. [Google Scholar] [CrossRef]
- Zhu, J. Data envelopment analysis with preference structure. J. Oper. Res. Soc. 1996, 47, 136–150. [Google Scholar] [CrossRef]
- Koopmans, T.C. An Analysis of Production as an Efficient Combination of Activities; John Wiley and Sons Inc.: London, UK, 1951. [Google Scholar]
- Sawaragi, Y.; Nakayama, H.; Tanino, T. Theory of Multiobjective Optimization; Elsevier: Amsterdam, The Netherlands, 1985. [Google Scholar]
- Wiecek, M.M. Model-Based Decision Support Methodology with Environmental Applications. Interfaces 2002, 32, 84. [Google Scholar]
- Gal, T.; Stewart, T.; Hanne, T. Multicriteria Decision Making: Advances in MCDM Models, Algorithms, Theory, and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 21. [Google Scholar]
- Park, K.S.; Shin, D.E. Interactive multiobjective optimization approach to the input–output design of opening new branches. Eur. J. Oper. Res. 2012, 220, 530–538. [Google Scholar] [CrossRef]
- Golany, B. An interactive MOLP procedure for the extension of DEA to effectiveness analysis. J. Oper. Res. Soc. 1988, 39, 725–734. [Google Scholar] [CrossRef]
- Post, T.; Spronk, J. Performance benchmarking using interactive data envelopment analysis. Eur. J. Oper. Res. 1999, 115, 472–487. [Google Scholar] [CrossRef]
- Halme, M.; Joro, T.; Korhonen, P.; Salo, S.; Wallenius, J. A value efficiency approach to incorporating preference information in data envelopment analysis. Manag. Sci. 1999, 45, 103–115. [Google Scholar] [CrossRef]
- Charkhgard, H.; Savelsbergh, M.; Talebian, M. A linear programming based algorithm to solve a class of optimization problems with a multi-linear objective function and affine constraints. Comput. Oper. Res. 2018, 89, 17–30. [Google Scholar] [CrossRef]
- Elliot, T.; Bertrand, A.; Almenar, J.B.; Petucco, C.; Proença, V.; Rugani, B. Spatial optimisation of urban ecosystem services through integrated participatory and multi-objective integer linear programming. Ecol. Model. 2019, 409, 108774. [Google Scholar] [CrossRef]
- Korhonen, P.; Soismaa, M.; Siljamäki, A. On the use of value efficiency analysis and some further developments. J. Product. Anal. 2002, 17, 49–64. [Google Scholar] [CrossRef]
- Joro, T.; Korhonen, P.; Zionts, S. An interactive approach to improve estimates of value efficiency in data envelopment analysis. Eur. J. Oper. Res. 2003, 149, 688–699. [Google Scholar] [CrossRef]
- Yang, J.-B.; Wong, B.Y.; Xu, D.-L.; Stewart, T.J. Integrating DEA-oriented performance assessment and target setting using interactive MOLP methods. Eur. J. Oper. Res. 2009, 195, 205–222. [Google Scholar] [CrossRef]
- Wong, B.Y.; Luque, M.; Yang, J.-B. Using interactive multiobjective methods to solve DEA problems with value judgements. Comput. Oper. Res. 2009, 36, 623–636. [Google Scholar] [CrossRef]
- Yun, Y.B.; Nakayama, H.; Tanino, T. A generalized model for data envelopment analysis. Eur. J. Oper. Res. 2004, 157, 87–105. [Google Scholar] [CrossRef]
- Yun, Y.B.; Nakayama, H.; Arakawa, M. Multiple criteria decision making with generalized DEA and an aspiration level method. Eur. J. Oper. Res. 2004, 158, 697–706. [Google Scholar] [CrossRef]
- Lotfi, F.H.; Jahanshahloo, G.R.; Ebrahimnejad, A.; Soltanifar, M.; Mansourzadeh, S.M. Target setting in the general combined-oriented CCR model using an interactive MOLP method. J. Comput. Appl. Math. 2010, 234, 1–9. [Google Scholar] [CrossRef]
- Lotfi, F.H.; Jahanshahloo, G.R.; Soltanifar, M.; Ebrahimnejad, A.; Mansourzadeh, S.M. Relationship between MOLP and DEA based on output-orientated CCR dual model. Expert Syst. Appl. 2010, 37, 4331–4336. [Google Scholar] [CrossRef]
- Zionts, S.; Wallenius, J. An interactive programming method for solving the multiple criteria problem. Manag. Sci. 1976, 22, 652–663. [Google Scholar] [CrossRef]
- Mirmozaffari, M.; Yazdani, M.; Boskabadi, A.; Ahady Dolatsara, H.; Kabirifar, K.; Amiri Golilarz, N. A novel machine learning approach combined with optimization models for eco-efficiency evaluation. Appl. Sci. 2020, 10, 5210. [Google Scholar] [CrossRef]
- Amin, G.R.; Toloo, M. A polynomial-time algorithm for finding ε in DEA models. Comput. Oper. Res. 2004, 31, 803–805. [Google Scholar] [CrossRef]
- Toloo, M.; Ebrahimi, B.; Amin, G.R. New data envelopment analysis models for classifying flexible measures: The role of non-Archimedean epsilon. Eur. J. Oper. Res. 2020, 292, 1037–1050. [Google Scholar] [CrossRef]
- Yun, Y.; Yoon, M.; Nakayama, H. Genetic Algorithm for Multi-objective Optimization Using GDEA. In International Conference on Natural Computation; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3612, pp. 409–416. [Google Scholar]
- Hwang, C.-L.; Masud, A.S.M. Multiple Objective Decision Making—Methods and Applications: A State-of-the-Art Survey; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 164. [Google Scholar]
- Ghadami, N.; Gheibi, M.; Kian, Z.; Faramarz, M.G.; Naghedi, R.; Eftekhari, M.; Fathollahi-Fard, A.M.; Dulebenets, M.A.; Tian, G. Implementation of solar energy in smart cities using an integration of artificial neural network, photovoltaic system and classical Delphi methods. Sustain. Cities Soc. 2021, 74, 103149. [Google Scholar] [CrossRef]
- Shahsavar, M.M.; Akrami, M.; Gheibi, M.; Kavianpour, B.; Fathollahi-Fard, A.M.; Behzadian, K. Constructing a smart framework for supplying the biogas energy in green buildings using an integration of response surface methodology, artificial intelligence and petri net modelling. Energy Convers. Manag. 2021, 248, 114794. [Google Scholar] [CrossRef]
- Sohani, A.; Naderi, S.; Torabi, F.; Sayyaadi, H.; Golizadeh Akhlaghi, Y.; Zhao, X.; Talukdar, K.; Said, Z. Application based multi-objective performance optimization of a proton exchange membrane fuel cell. J. Clean. Prod. 2020, 252, 119567. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
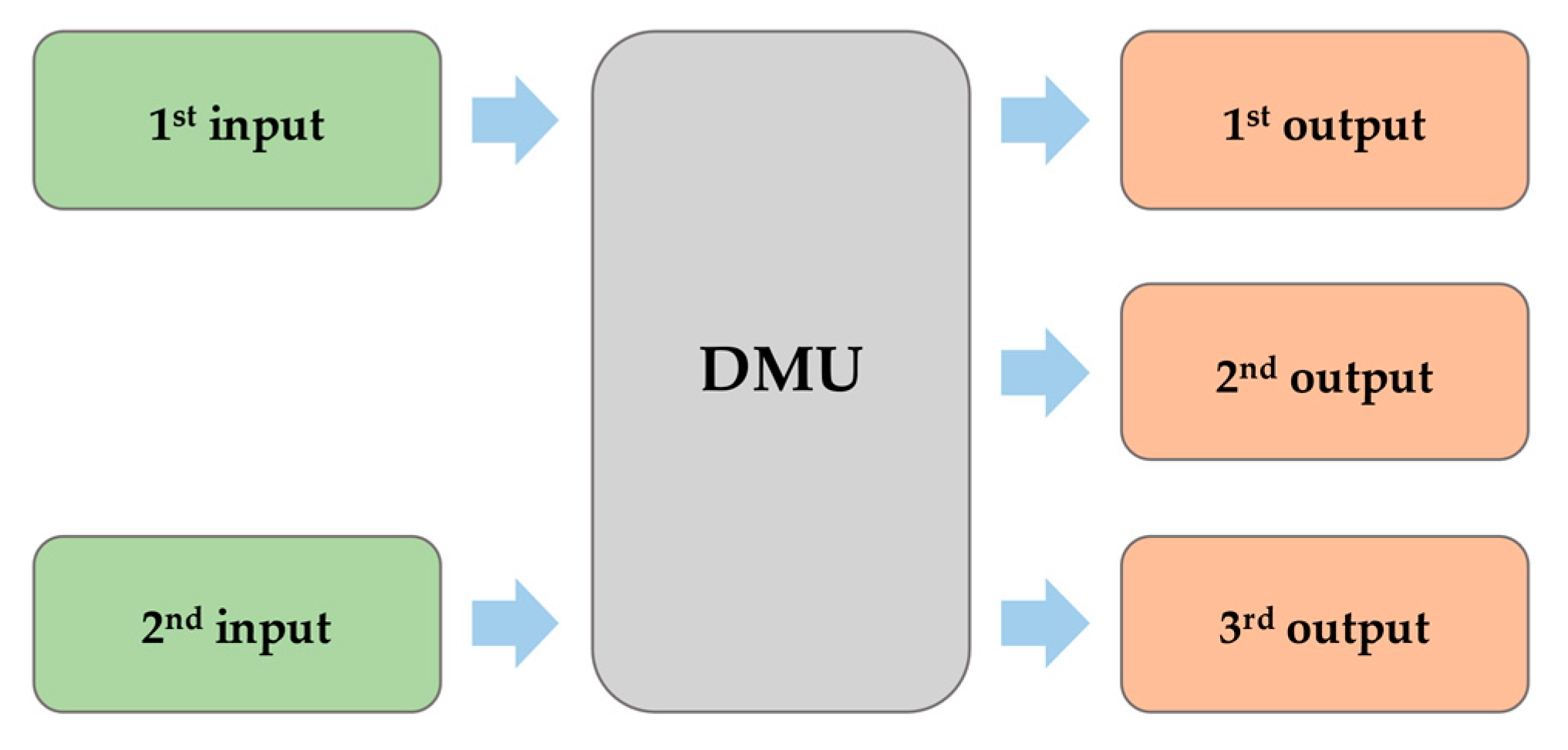
| Descriptions | Inputs/Outputs |
|---|---|
| Average Length of Stay (ALOS) in hours | Inputs |
| Average OT/PT Charges in 10$ | |
| Average severe patients | Outputs |
| Average semi-severe patients | |
| Average mild patients |
| Output 3 (Average Mild Patients) | Output 2 (Average Semi-Severe Patients) | Output 1 (Average Severe Patients) | Input 2 (Average OT/PT Charges) | Input 1 (Average Length of Stay (ALOS)) | No. Hospital |
|---|---|---|---|---|---|
| 291 | 198 | 242 | 217 | 168 | 1 |
| 176 | 243 | 185 | 177 | 187 | 2 |
| 133 | 247 | 103 | 278 | 115 | 3 |
| 133 | 129 | 170 | 266 | 151 | 4 |
| 171 | 222 | 115 | 219 | 105 | 5 |
| 340 | 122 | 155 | 291 | 172 | 6 |
| 176 | 197 | 103 | 203 | 124 | 7 |
| 201 | 236 | 207 | 188 | 184 | 8 |
| 240 | 325 | 298 | 131 | 273 | 9 |
| 214 | 115 | 141 | 119 | 167 | 10 |
| 185 | 355 | 201 | 249 | 175 | 11 |
| 195 | 272 | 281 | 167 | 177 | 12 |
| 451 | 357 | 210 | 249 | 154 | 13 |
| 291 | 198 | 330 | 257 | 206 | 14 |
| Output 3 (Average Mild Patients) | Output 2 (Average Semi-Severe Patients) | Output 1 (Average Severe Patients) | Input 2 (Average OT/PT Charges) | Input 1 (Average Length of Stay (ALOS)) | No. Hospital |
|---|---|---|---|---|---|
| 0.3111 | 0.217 | 0.3216 | 0.2624 | 0.26 | 1 |
| 0.238 | 0.2671 | 0.1942 | 0.2138 | 0.2885 | 2 |
| 0.1336 | 0.2709 | 0.1478 | 0.3356 | 0.1771 | 3 |
| 0.2189 | 0.1413 | 0.1475 | 0.3216 | 0.2333 | 4 |
| 0.148 | 0.2439 | 0.1895 | 0.2644 | 0.1622 | 5 |
| 0.1996 | 0.1337 | 0.376 | 0.3511 | 0.2648 | 6 |
| 0.1325 | 0.2165 | 0.1949 | 0.2458 | 0.192 | 7 |
| 0.2665 | 0.2594 | 0.2219 | 0.2275 | 0.2844 | 8 |
| 0.3829 | 0.3576 | 0.2657 | 0.1582 | 0.4205 | 9 |
| 0.1819 | 0.1267 | 0.2372 | 0.1439 | 0.2582 | 10 |
| 0.2585 | 0.3897 | 0.2049 | 0.3003 | 0.2702 | 11 |
| 0.3612 | 0.2983 | 0.2157 | 0.2025 | 0.2735 | 12 |
| 0.2709 | 0.3921 | 0.4986 | 0.3015 | 0.2381 | 13 |
| 0.4245 | 0.2412 | 0.2945 | 0.3101 | 0.318 | 14 |
| λ14 | λ13 | λ12 | λ11 | λ10 | λ9 | λ8 | λ7 | λ6 | λ5 | λ4 | λ3 | λ2 | λ1 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.396 | 0.561 | 0.043 | −0.00521 | 1 | |||||||||||
| 0.941 | 0.054 | 0.001 | −0.01463 | 2 | |||||||||||
| 0.186 | 0.814 | −0006.73 | 3 | ||||||||||||
| 0.437 | 0.563 | −0.02238 | 4 | ||||||||||||
| 1 | 0 | 5 | |||||||||||||
| 0.744 | 0.019 | 0.237 | −0.0439 | 6 | |||||||||||
| 0.002 | 0.105 | 0.139 | 0.754 | −0.0046 | 7 | ||||||||||
| 0.087 | 0.793 | 0.085 | 0.035 | −0.01923 | 8 | ||||||||||
| 1 | 0 | 9 | |||||||||||||
| 1 | 0 | 10 | |||||||||||||
| 0.98 | 0.02 | −0.00172 | 11 | ||||||||||||
| 1 | 0 | 12 | |||||||||||||
| 1 | 0 | 13 | |||||||||||||
| 1 | 0 | 14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirmozaffari, M.; Shadkam, E.; Khalili, S.M.; Yazdani, M. Developing a Novel Integrated Generalised Data Envelopment Analysis (DEA) to Evaluate Hospitals Providing Stroke Care Services. Bioengineering 2021, 8, 207. https://doi.org/10.3390/bioengineering8120207
Mirmozaffari M, Shadkam E, Khalili SM, Yazdani M. Developing a Novel Integrated Generalised Data Envelopment Analysis (DEA) to Evaluate Hospitals Providing Stroke Care Services. Bioengineering. 2021; 8(12):207. https://doi.org/10.3390/bioengineering8120207
Chicago/Turabian StyleMirmozaffari, Mirpouya, Elham Shadkam, Seyed Mohammad Khalili, and Maziar Yazdani. 2021. "Developing a Novel Integrated Generalised Data Envelopment Analysis (DEA) to Evaluate Hospitals Providing Stroke Care Services" Bioengineering 8, no. 12: 207. https://doi.org/10.3390/bioengineering8120207
APA StyleMirmozaffari, M., Shadkam, E., Khalili, S. M., & Yazdani, M. (2021). Developing a Novel Integrated Generalised Data Envelopment Analysis (DEA) to Evaluate Hospitals Providing Stroke Care Services. Bioengineering, 8(12), 207. https://doi.org/10.3390/bioengineering8120207