
A Point-Matching Method of Moment with Sparse Bayesian Learning Applied and Evaluated in Dynamic Lung Electrical Impedance Tomography





Abstract
1. Introduction
2. Background
2.1. EIT Principle
2.2. Time-Difference EIT
2.3. Single-Step Linear Reconstruction
2.4. Regularized Reconstruction Approaches
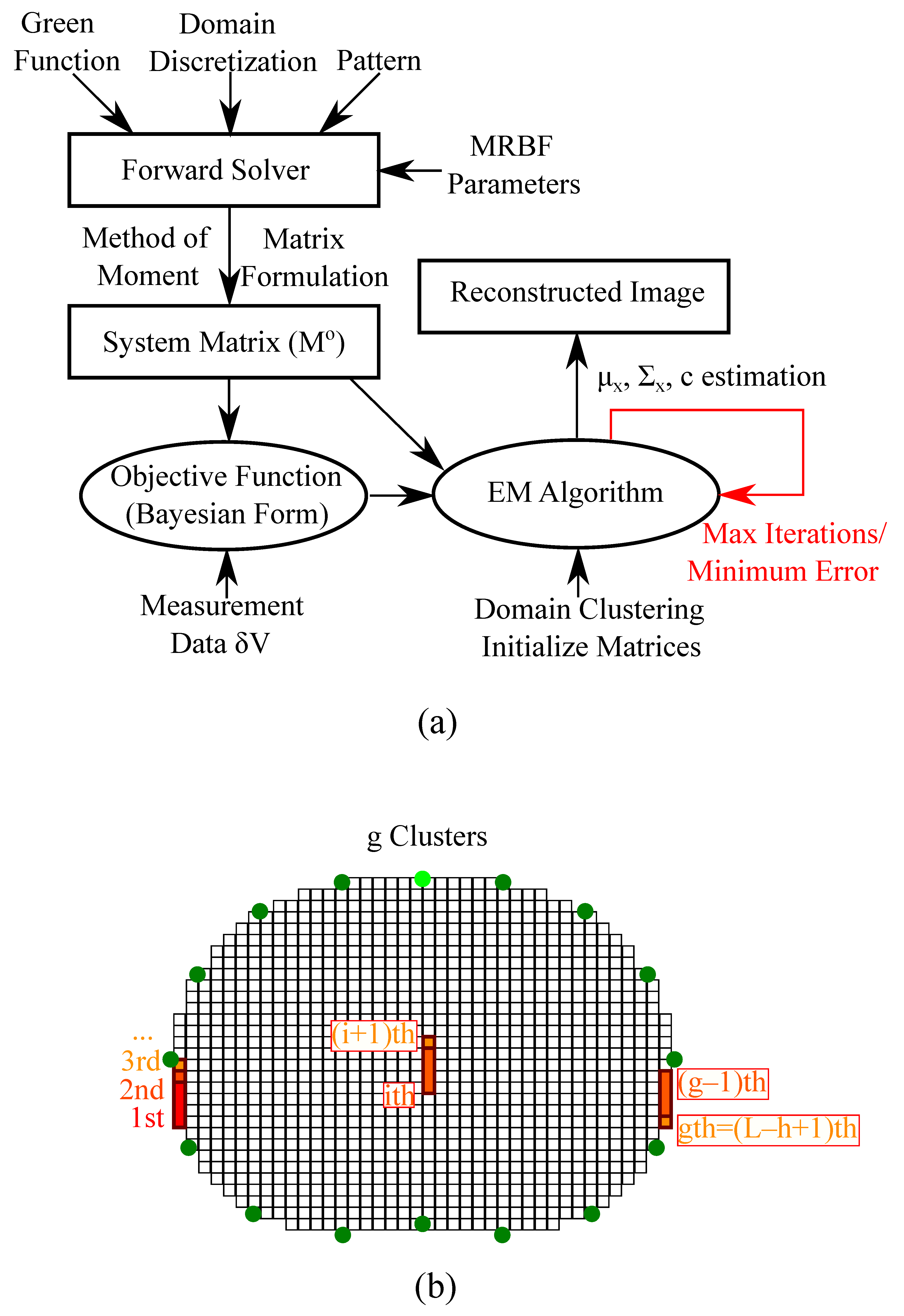
3. Method-of-Moment with Sparse Bayesian Learning (Pm-Mom SBL)
| Algorithm 1: Sparse Bayesian learning (SBL). |
Inputs:, , h, , Initialize:, , , , , , , , , , , , . LOOP: While and do 1. 2. 3. 4. , for each cluster . 5. , for each cluster . 6. , for each cluster . 7. , for each cluster . 8. , for each cluster . 9. Update and . 10. 11. End Output:
Estimate using (32) and (33). |
4. Evaluation Methods
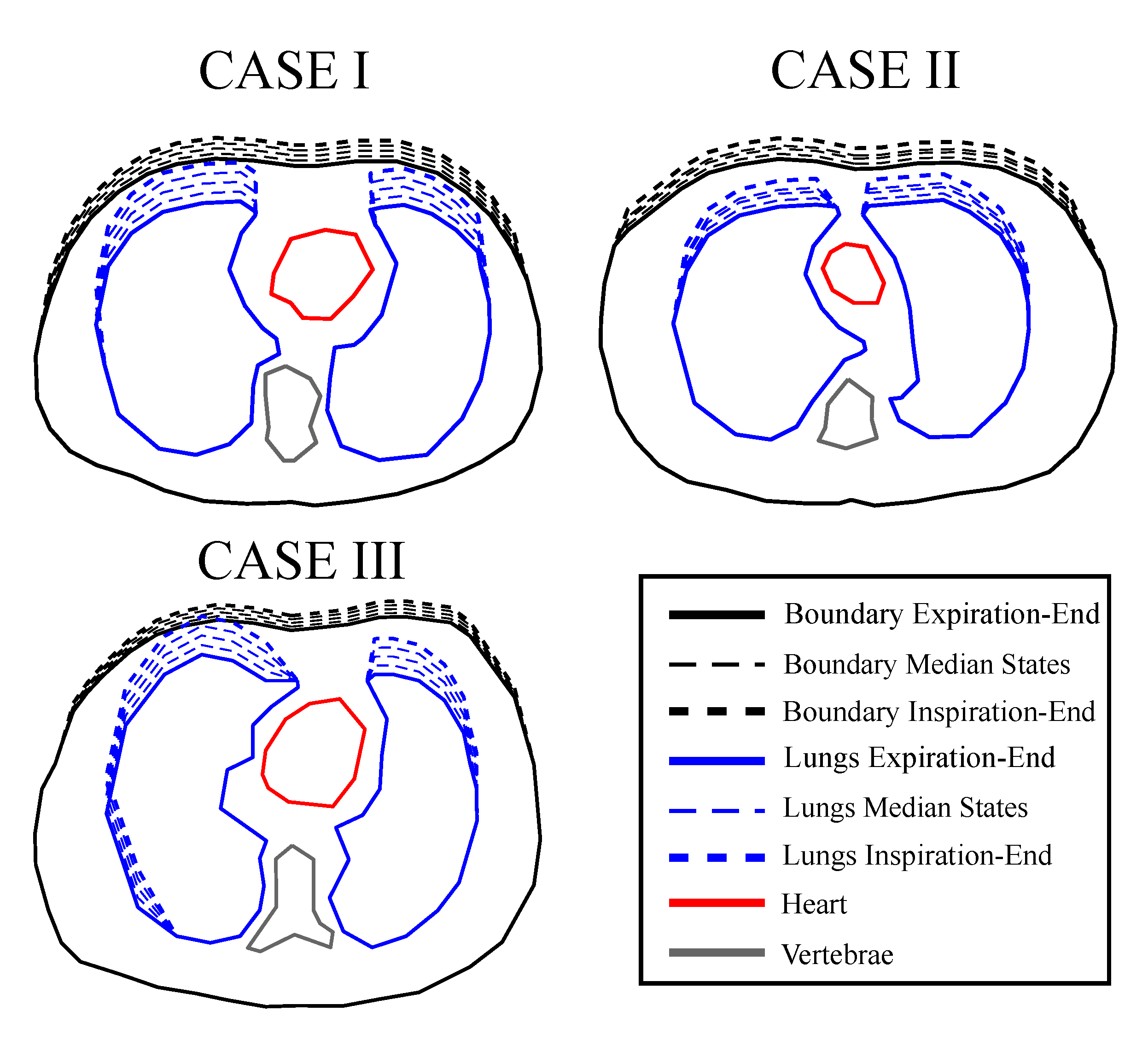
4.1. Thoracic Structures
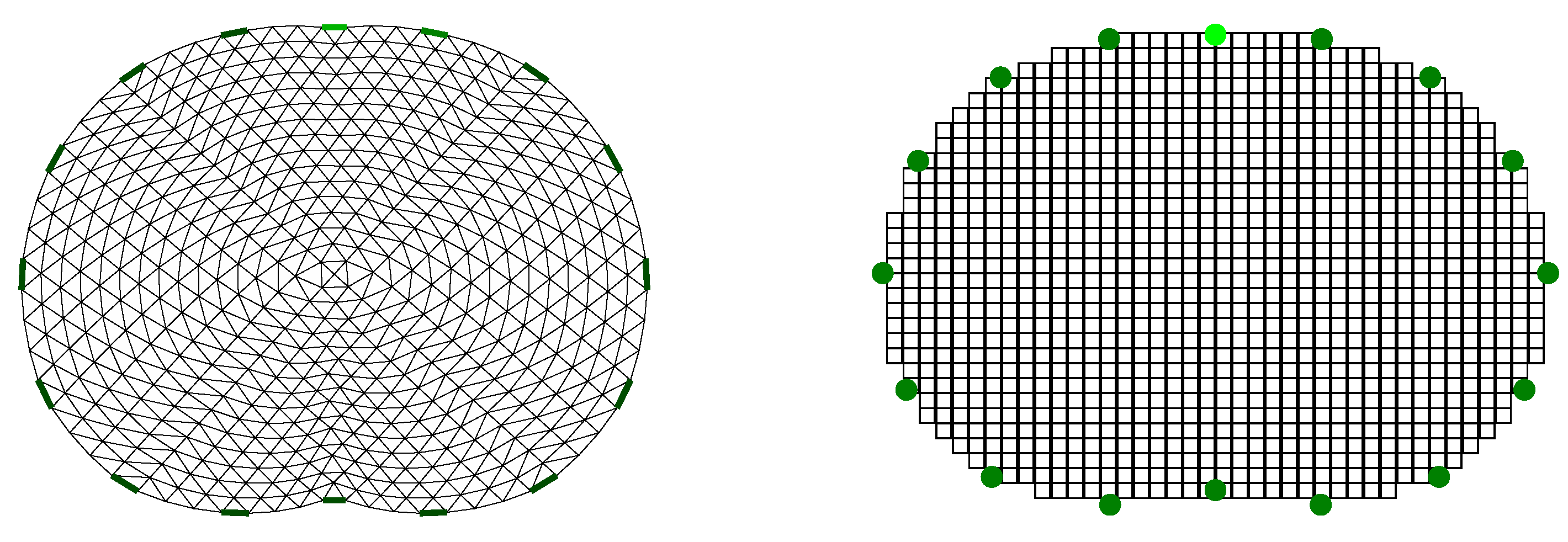
4.2. Reconstruction Domain
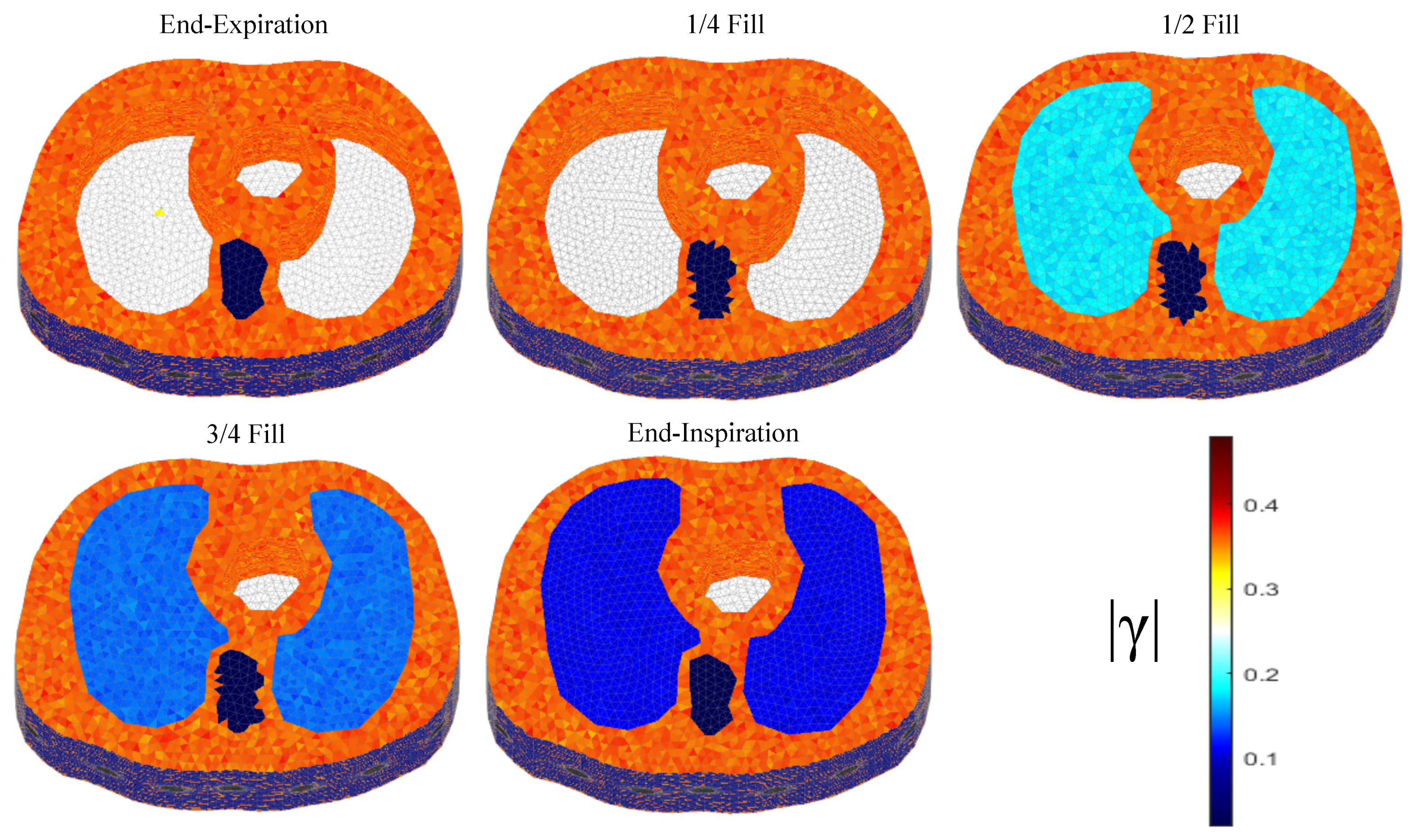
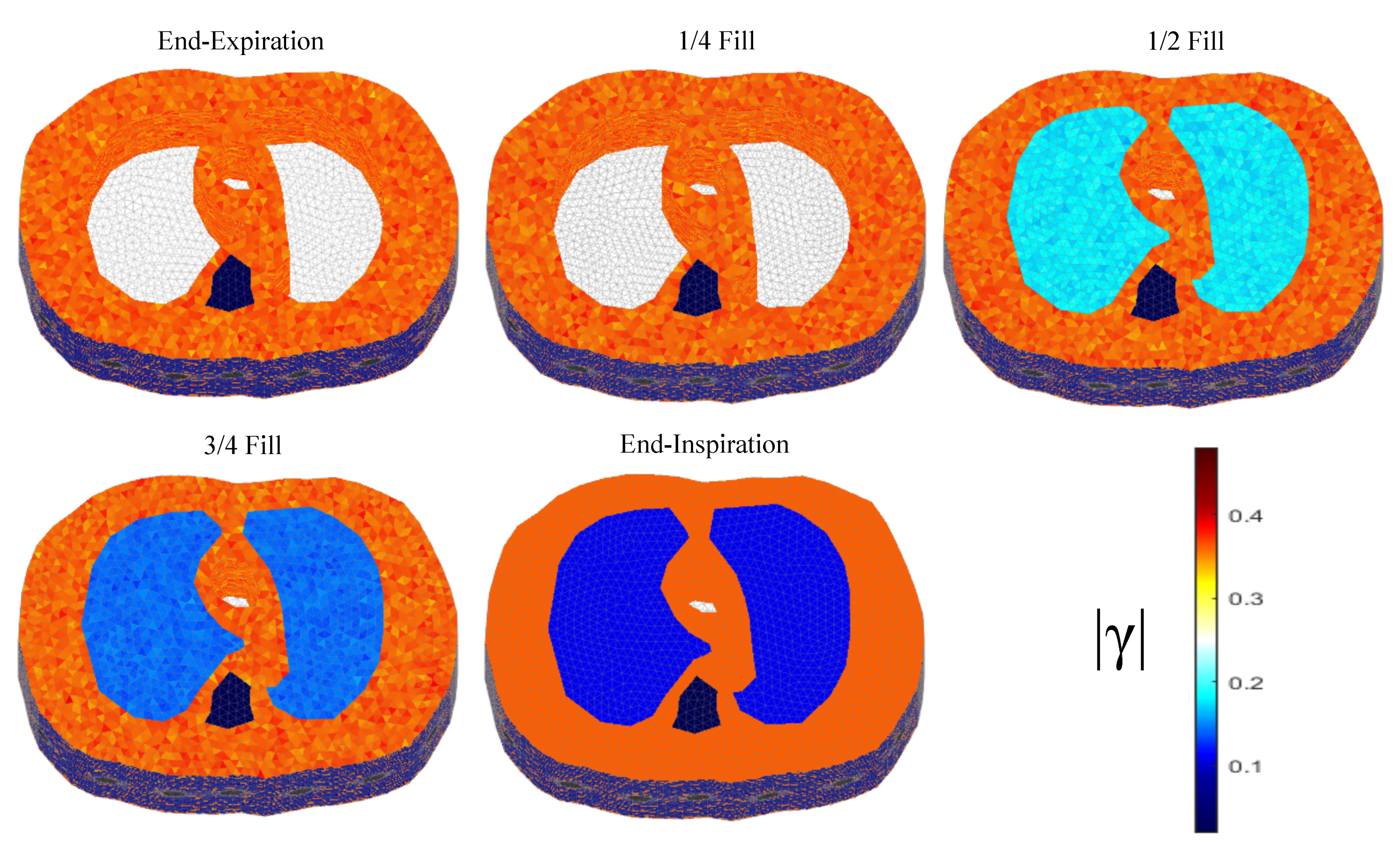
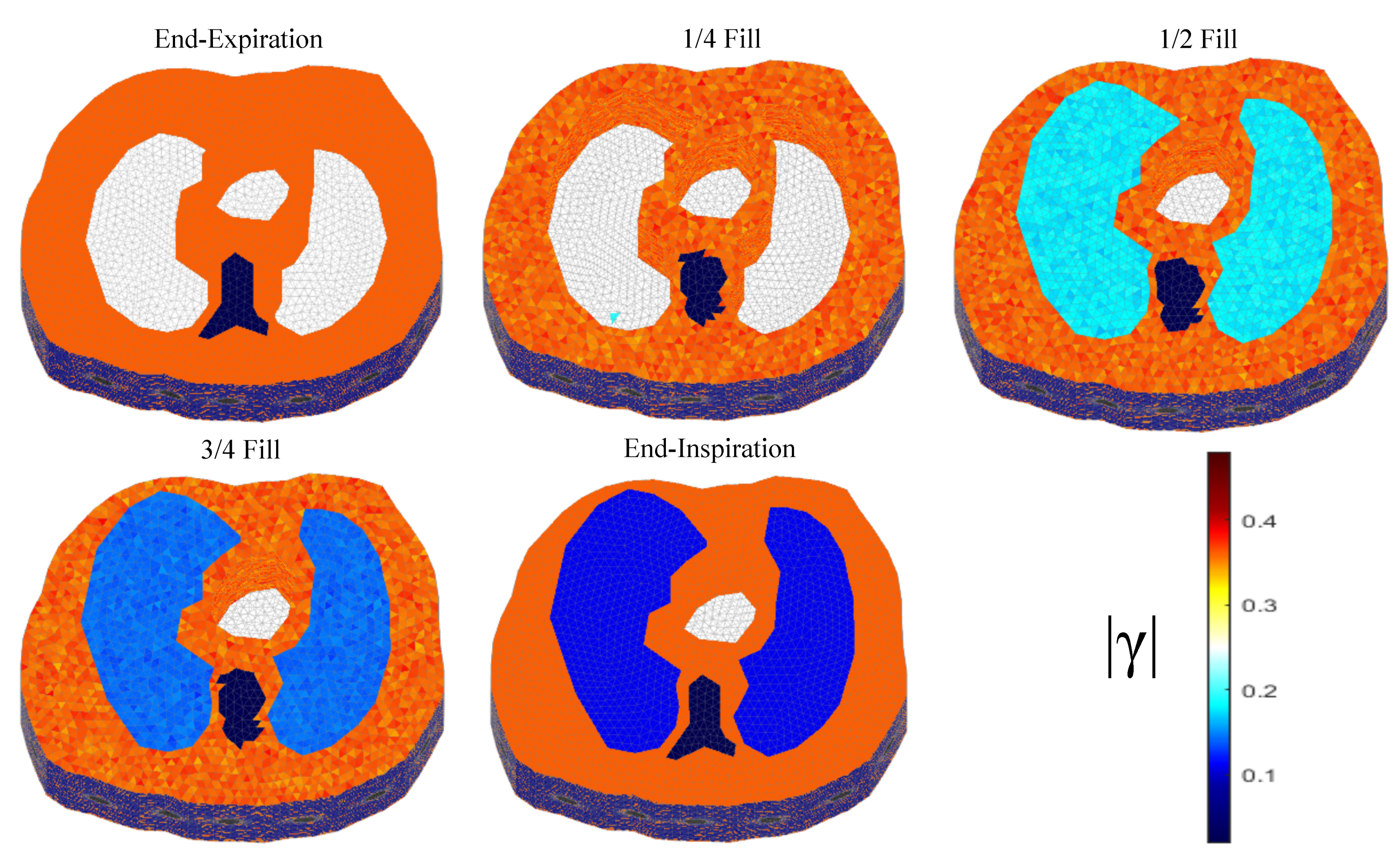
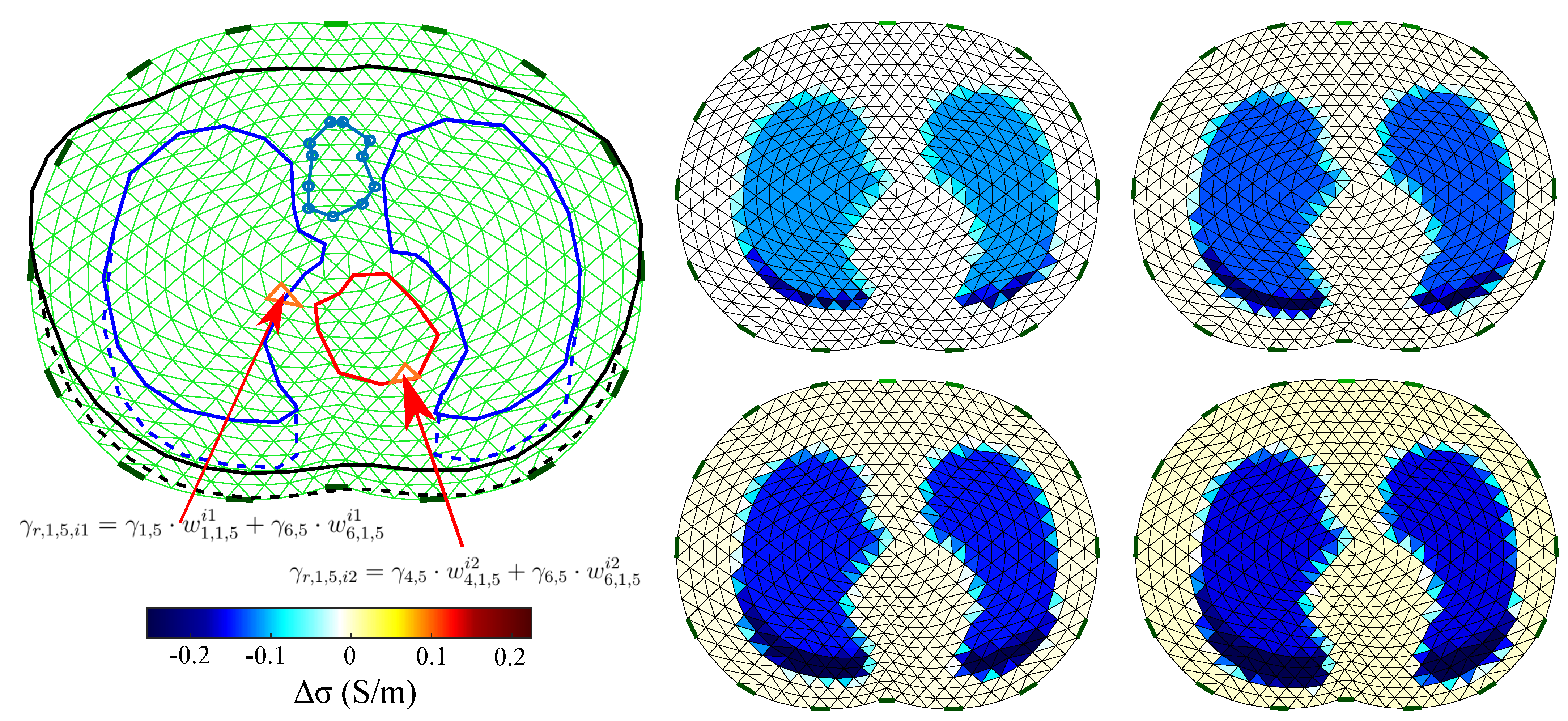
4.3. Reference Image Extraction
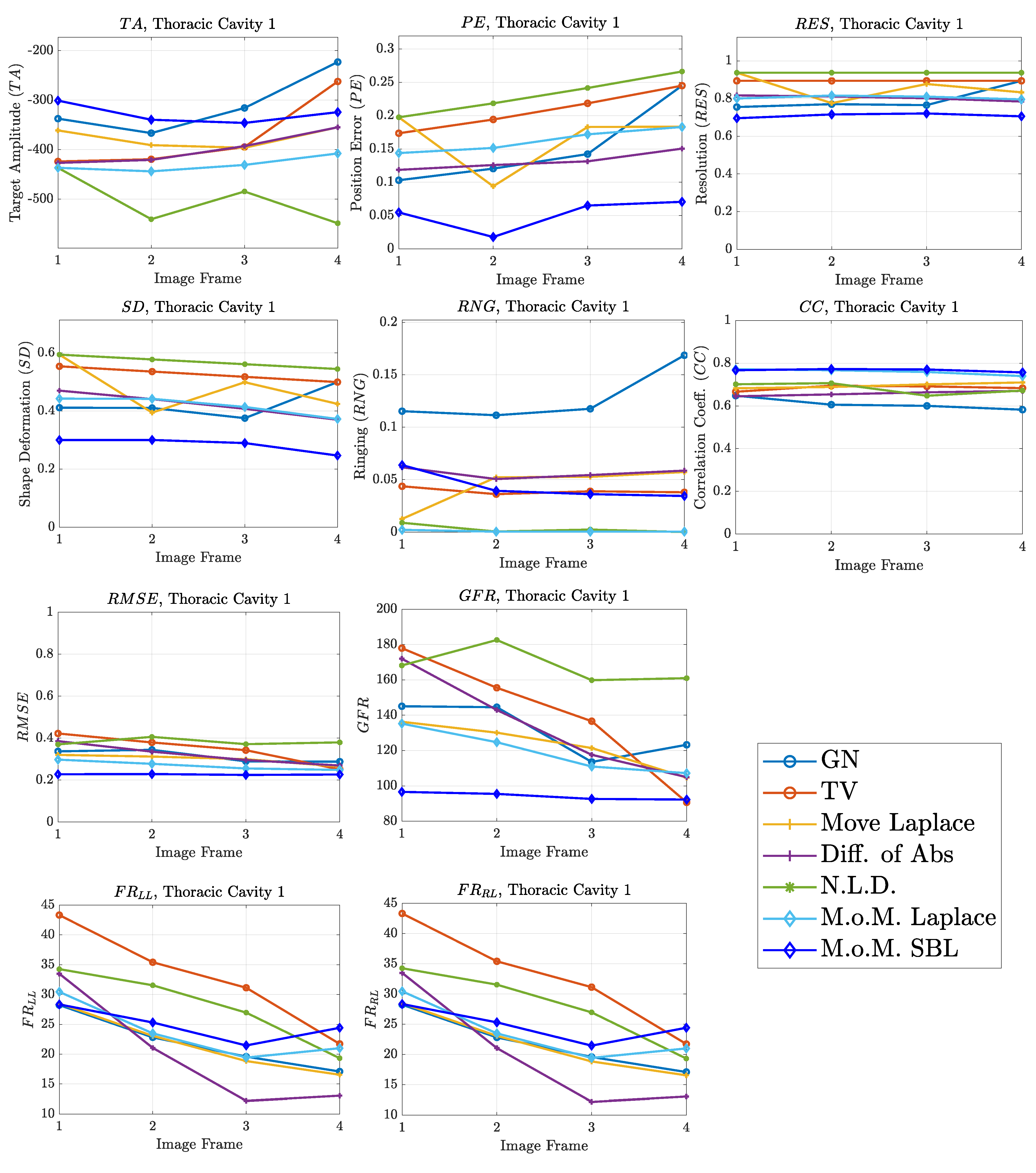
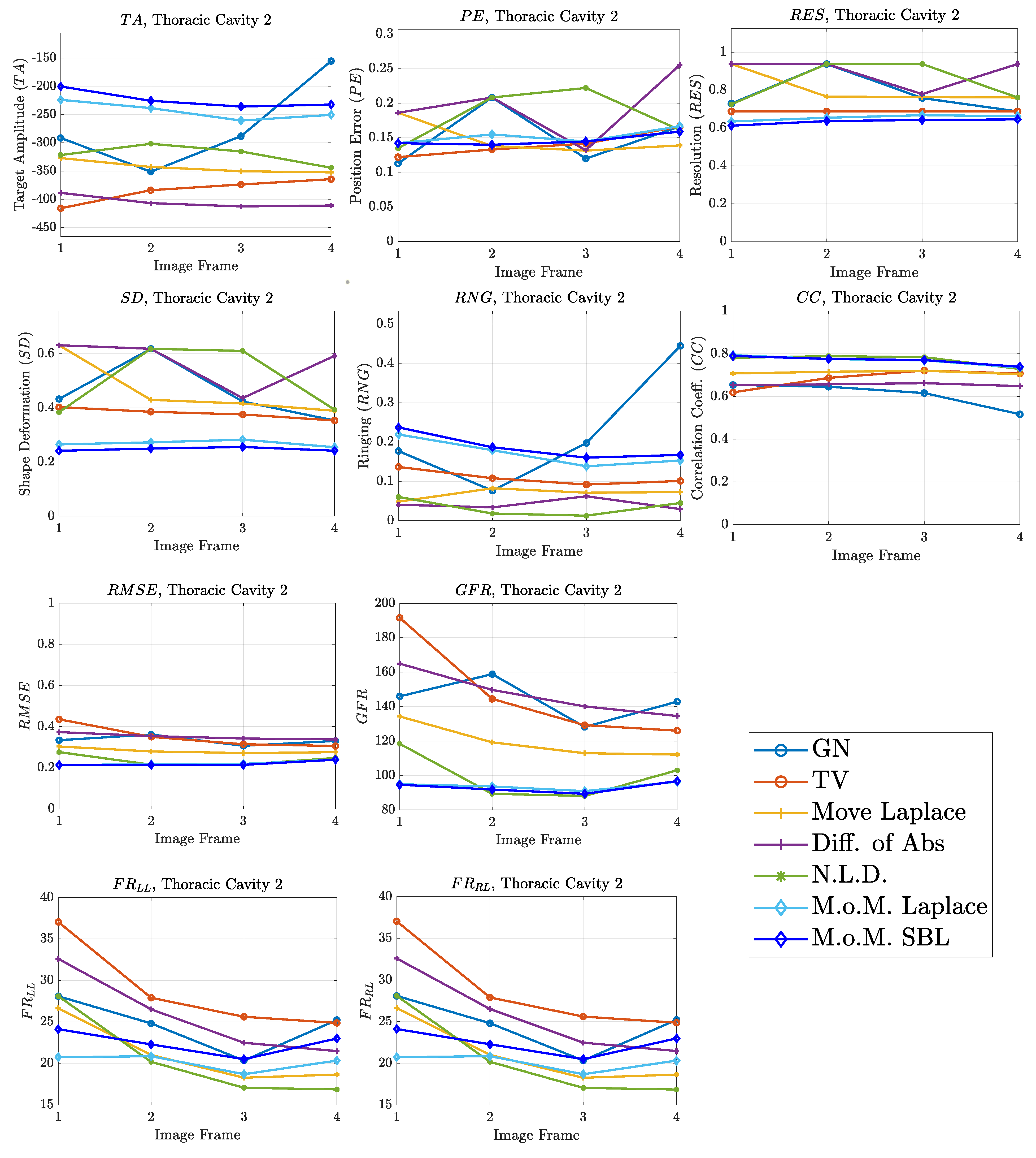
4.4. Figures of Merit
4.4.1. Target Amplitude—
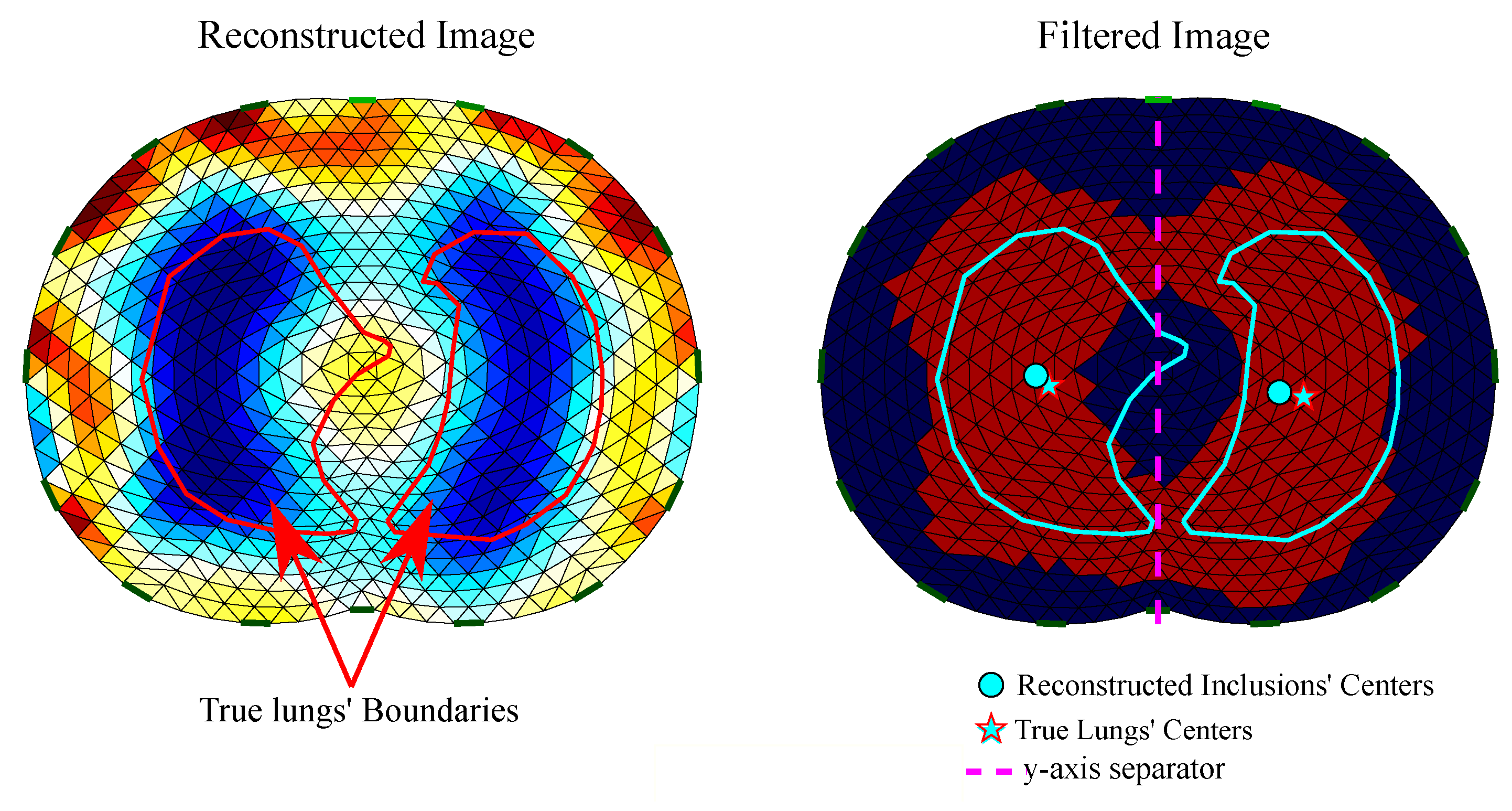
4.4.2. Position Error—
4.4.3. Shape Deformation—
4.4.4. Resolution—
4.4.5. Ringing—
4.4.6. Pearson Correlation Coefficient—
4.4.7. Root Mean Square Error—
4.4.8. Full Reference—
4.5. In Vivo Data
5. Results and Discussion
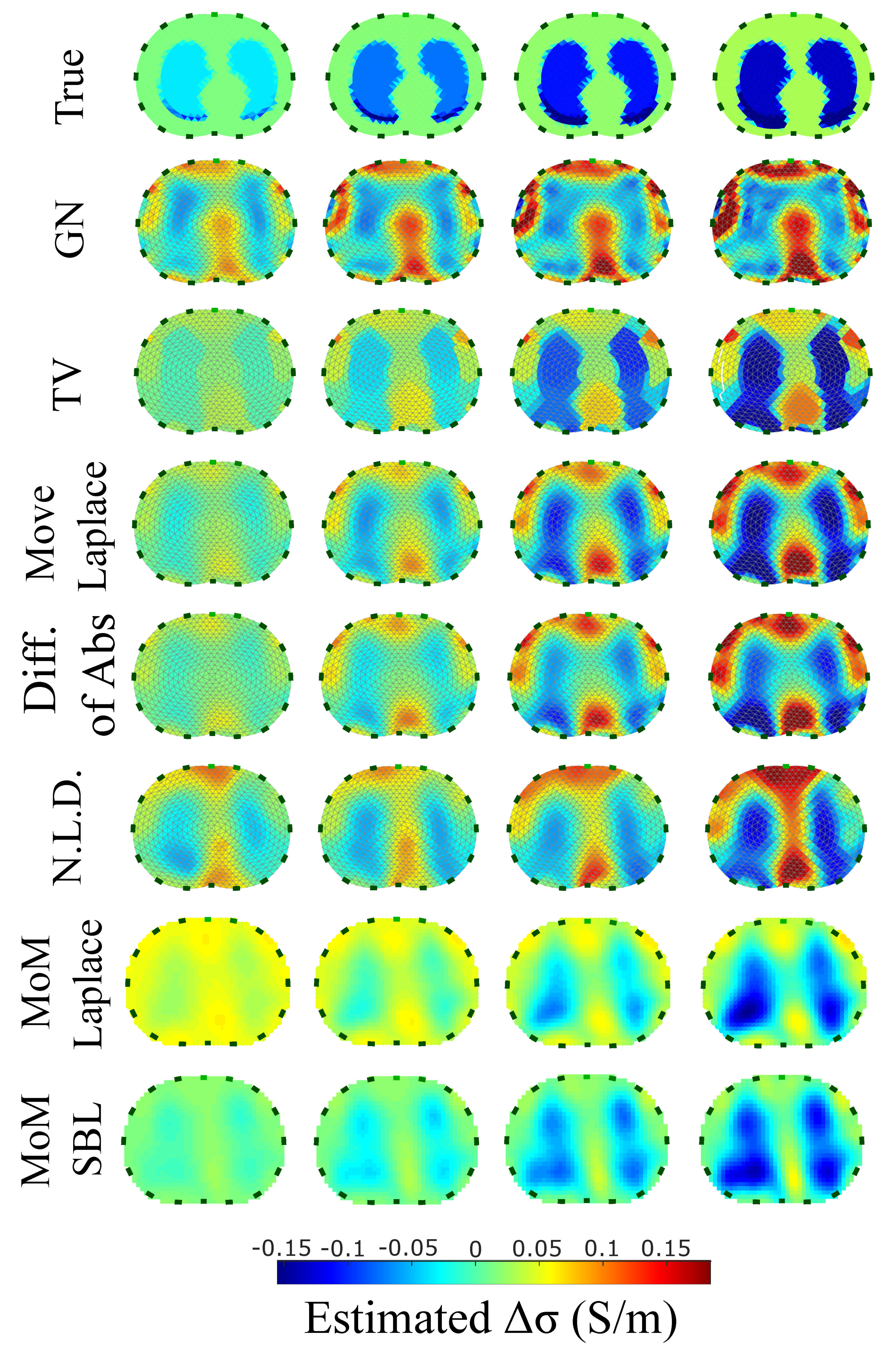
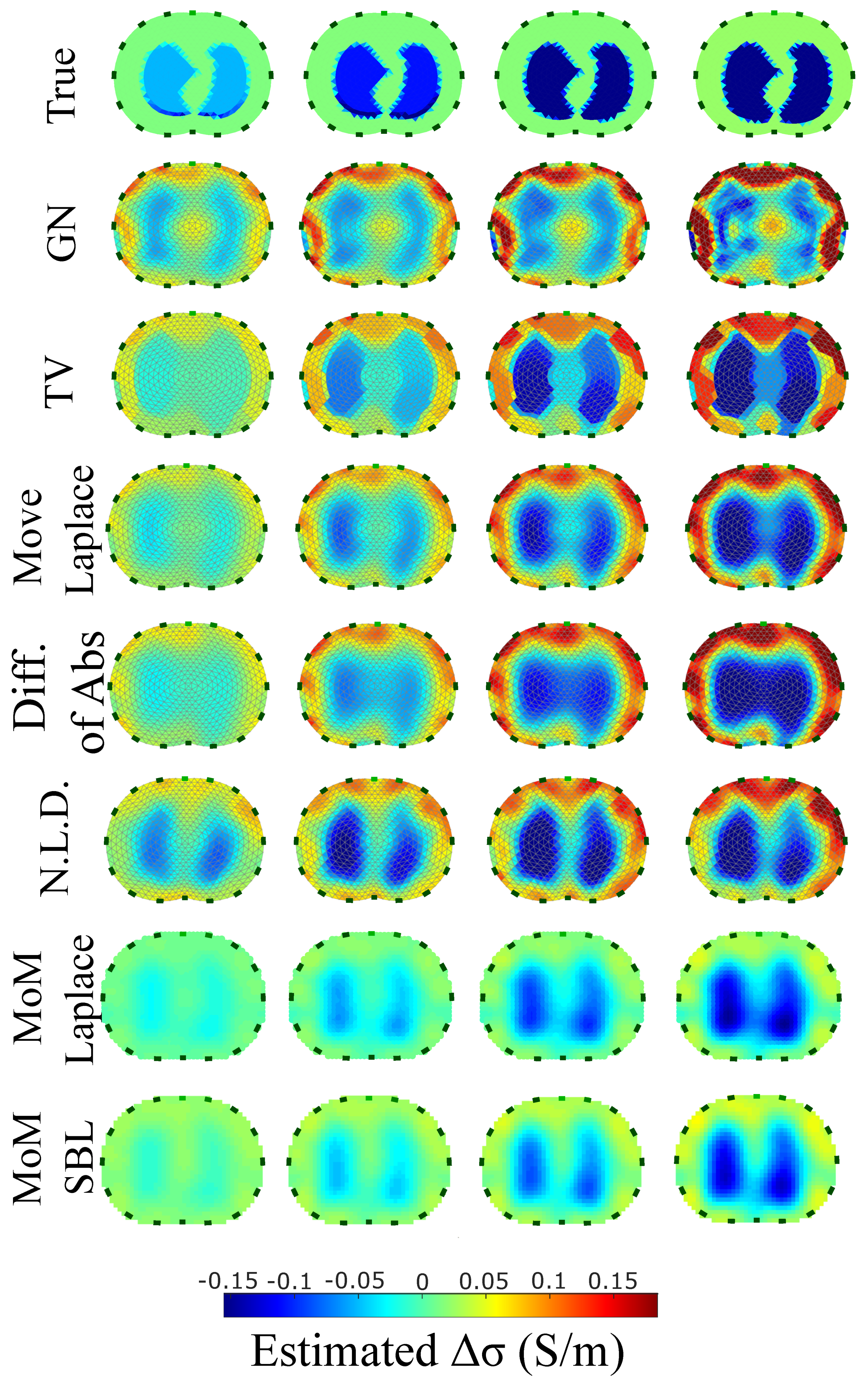
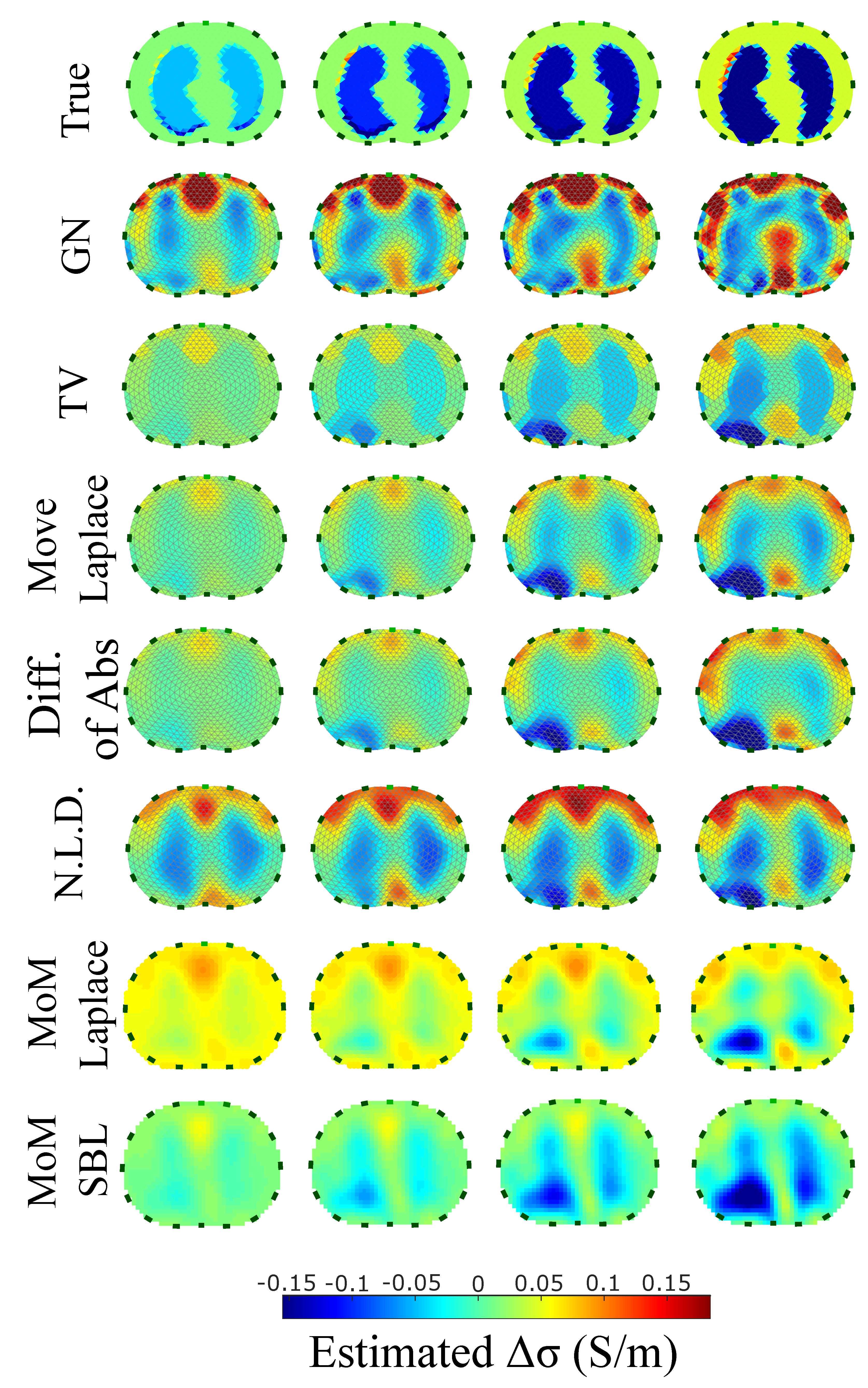
5.1. Simulation Results
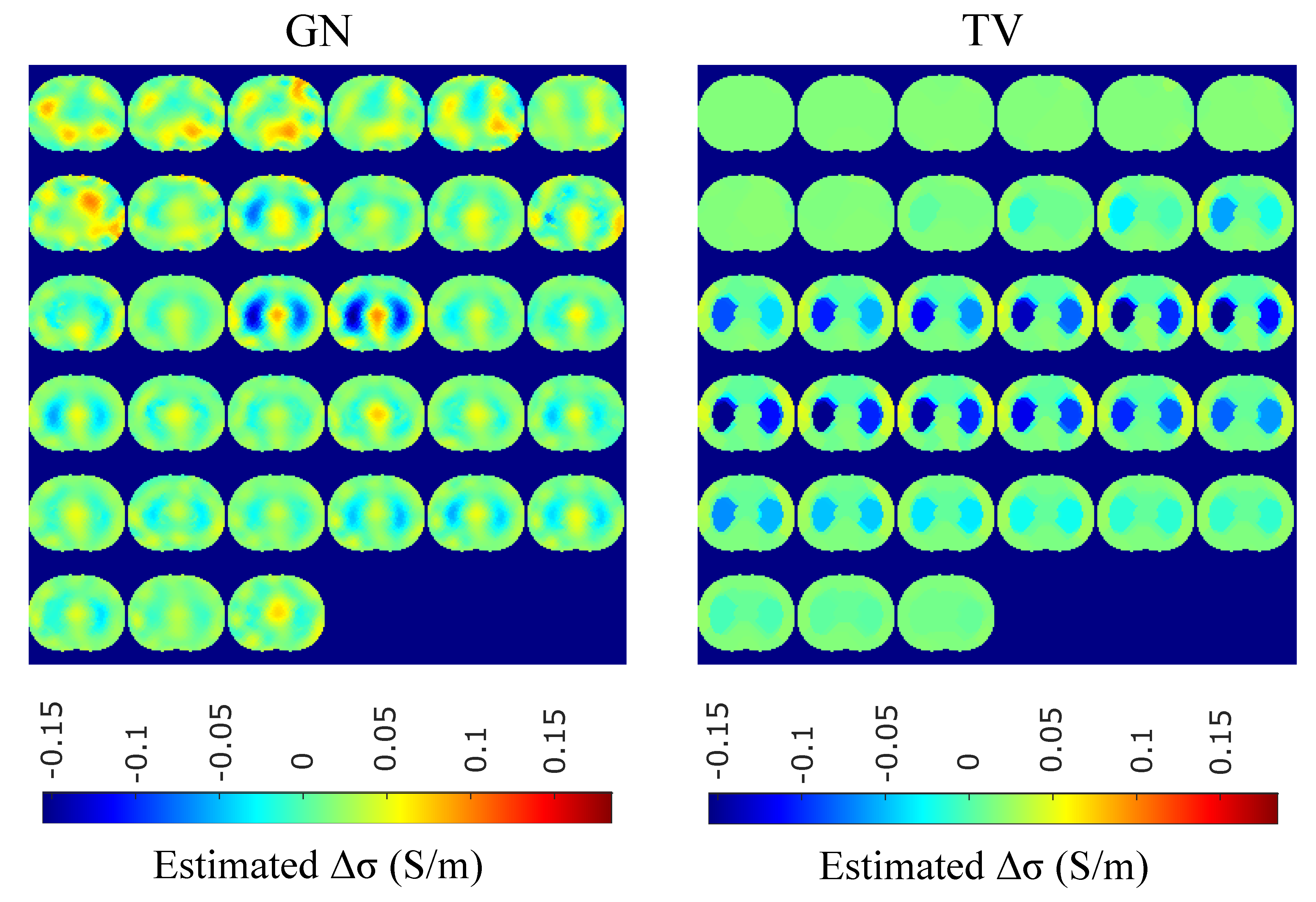
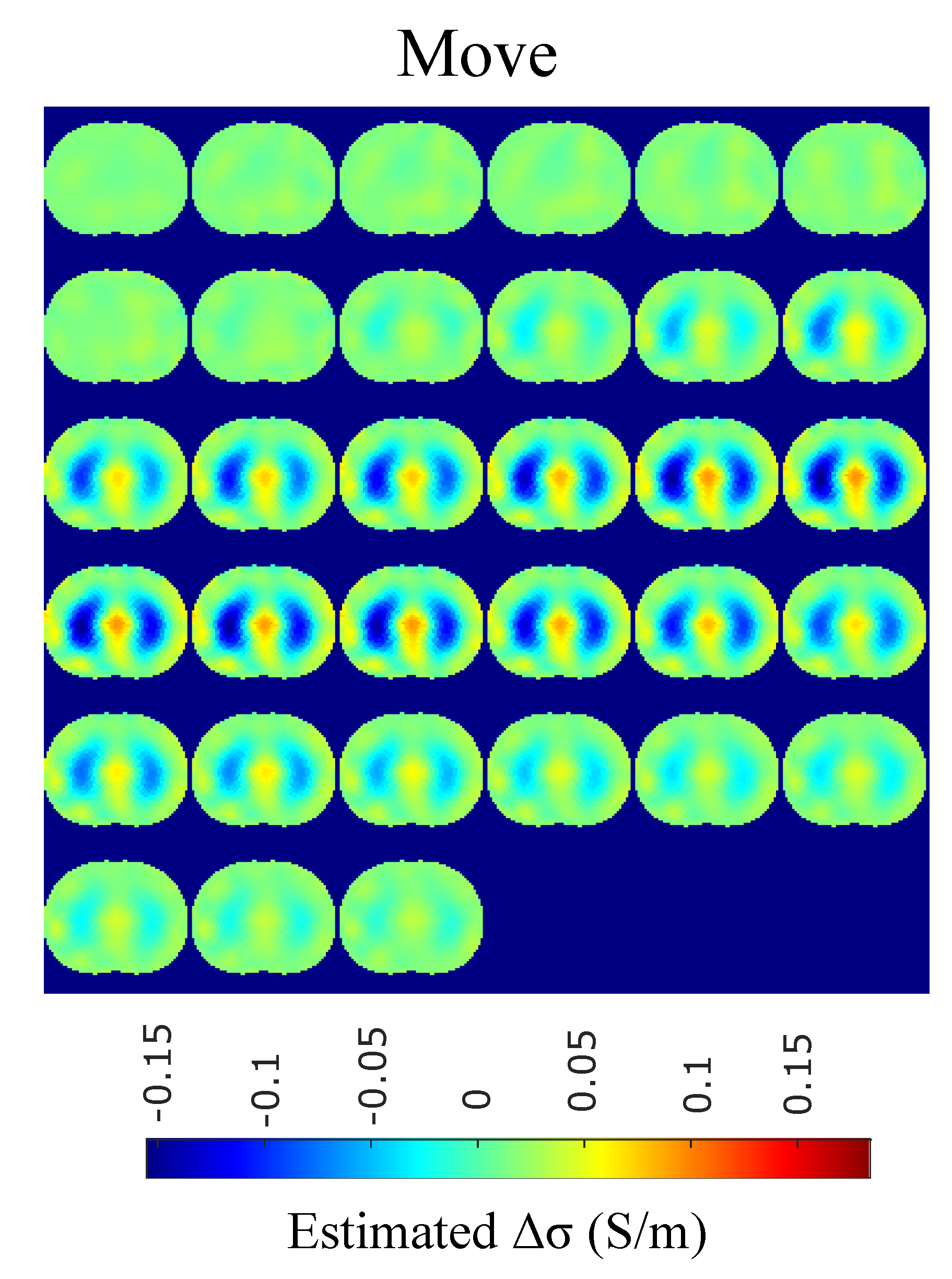
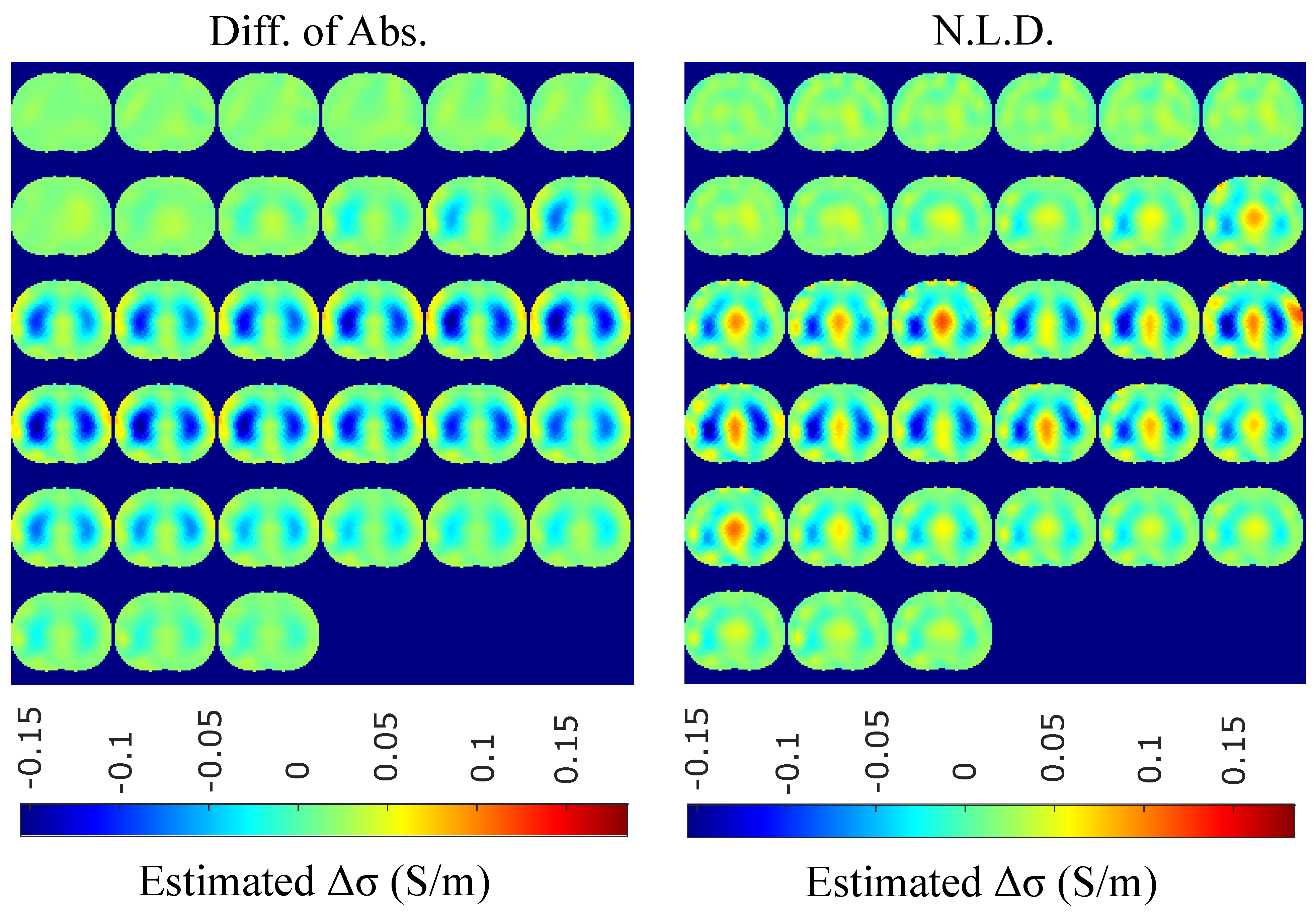
5.2. In Vivo Results
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Holder, D.S. (Ed.) Electrical Impedance Tomography: Methods, History and Applications; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Brabant, O.; Crivellari, B.; Hosgood, G.; Raisis, A.; Waldmann, A.D.; Auer, U.; Adler, A.; Smart, L.; Laurence, M.; Mosing, M. Effects of PEEP on the relationship between tidal volume and total impedance change measured via electrical impedance tomography (EIT). J. Clin. Monit. Comput. 2021, 2021, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Bachmann, M.C.; Morais, C.; Bugedo, G.; Bruhn, A.; Morales, A.; Borges, J.B.; Costa, E.; Retamal, J.; Retamal, J. Electrical impedance tomography in acute respiratory distress syndrome. Crit. Care 2018, 22, 263. [Google Scholar] [CrossRef] [PubMed]
- XMurphy, E.K.; Takhti, M.; Skinner, J.; Halter, R.J.; Odame, K. Signal-to-noise ratio analysis of a phase-sensitive voltmeter for electrical impedance tomography. IEEE Trans. Biomed. Circuits Syst. 2016, 11, 360–369. [Google Scholar]
- Takhti, M.; Odame, K. Structured design methodology to achieve a high SNR electrical impedance tomography. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 364–375. [Google Scholar] [CrossRef] [PubMed]
- Wi, H.; Sohal, H.; McEwan, A.L.; Woo, E.J.; Oh, T.I. Multi-Frequency Electrical Impedance Tomography System With Automatic Self-Calibration for Long-Term Monitoring. IEEE Trans. Biomed. Circuits Syst. 2013, 8, 119–128. [Google Scholar]
- Mellenthin, M.M.; Mueller, J.L.; De Camargo, E.D.L.B.; De Moura, F.S.; Santos, T.B.R.; Lima, R.G.; Alsaker, M. The ACE1 electrical impedance tomography system for thoracic imaging. IEEE Trans. Instrum. Meas. 2018, 68, 3137–3150. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, D.; Bardill, A.; De Gelidi, S.; Bayford, R.; Demosthenous, A. A high frame rate wearable EIT system using active electrode ASICs for lung respiration and heart rate monitoring. IEEE Trans. Circuits Syst. Regul. Pap. 2018, 65, 3810–3820. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, D.; Bardill, A.; Bayford, R.; Demosthenous, A. A 122 fps, 1 MHz bandwidth multi-frequency wearable EIT belt featuring novel active electrode architecture for neonatal thorax vital sign monitoring. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 927–937. [Google Scholar] [CrossRef]
- Grychtol, B.; Lionheart, W.R.; Bodenstein, M.; Wolf, G.K.; Adler, A. Impact of model shape mismatch on reconstruction quality in electrical impedance tomography. IEEE Trans. Med Imaging 2012, 31, 1754–1760. [Google Scholar] [CrossRef] [PubMed]
- Grychtol, B.; Adler, A. Uniform background assumption produces misleading lung EIT images. Physiol. Meas. 2013, 34, 579–593. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Kolehmainen, V.; Siltanen, S.; Laukkanen, A.M.; Seppänen, A. Nonlinear difference imaging approach to three-dimensional electrical impedance tomography in the presence of geometric modeling errors. IEEE Trans. Biomed. Eng. 2015, 63, 1956–1965. [Google Scholar] [CrossRef]
- Adler, A.; Amyot, R.; Guardo, R.; Bates, J.H.T.; Berthiaume, Y. Monitoring changes in lung air and liquid volumes with electrical impedance tomography. J. Appl. Physiol. 1997, 83, 1762–1767. [Google Scholar] [CrossRef] [PubMed]
- Vauhkonen, M.; Vadász, D.; Karjalainen, P.A.; Somersalo, E.; Kaipio, J.P. Tikhonov regularization and prior information in electrical impedance tomography. IEEE Trans. Med. Imaging 1998, 17, 285–293. [Google Scholar] [CrossRef]
- Cheney, M.; Isaacson, D.; Newell, J.C.; Simske, S.; Goble, J. NOSER: An algorithm for solving the inverse conductivity problem. Int. J. Imaging Syst. Technol. 1990, 2, 66–75. [Google Scholar] [CrossRef]
- Adler, A.; Guardo, R. Electrical impedance tomography: Regularized imaging and contrast detection. IEEE Trans. Med. Imaging 1996, 15, 170–179. [Google Scholar] [CrossRef]
- Soleimani, M.; Gómez-Laberge, C.; Adler, A. Imaging of conductivity changes and electrode movement in EIT. Physiol. Meas. 2006, 27, S103–S113. [Google Scholar] [CrossRef] [PubMed]
- Biguri, A.; Grychtol, B.; Adler, A.; Soleimani, M. Tracking boundary movement and exterior shape modelling in lung EIT imaging. Physiol. Meas. 2015, 36, 1119–1135. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Adler, A.; Arnold, J.H.; Bayford, R.; Borsic, A.; Brown, B.; Dixon, P.; Faes, T.J.; Frerichs, I.; Gagnon, H.; Gärber, Y.; et al. GREIT: A unified approach to 2D linear EIT reconstruction of lung images. Physiol. Meas. 2009, 30, S35–S55. [Google Scholar] [CrossRef]
- Hua, P.; Woo, E.J.; Webster, J.G.; Tompkins, W.J. Iterative reconstruction methods using regularization and optimal current patterns in electrical impedance tomography. IEEE Trans. Med. Imaging 1991, 10, 621–628. [Google Scholar] [CrossRef]
- Borsic, A.; Graham, B.M.; Adler, A.; Lionheart, W.R. Total Variation Regularization in Electrical Impedance Tomography; MIMS Preprint; The University of Manchester: Manchester, UK, 2007. [Google Scholar]
- Borsic, A.; Graham, B.M.; Adler, A.; Lionheart, W.R. In vivo impedance imaging with total variation regularization. IEEE Trans. Med. Imaging 2009, 29, 44–54. [Google Scholar] [CrossRef]
- Zhou, Z.; Dos Santos, G.S.; Dowrick, T.; Avery, J.; Sun, Z.; Xu, H.; Holder, D.S. Comparison of total variation algorithms for electrical impedance tomography. Physiol. Meas. 2015, 36, 1193–1209. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Kolehmainen, V.; Siltanen, S.; Seppanen, A. Estimation of conductivity changes in a region of interest with electrical impedance tomography. Inverse Probl. Imaging 2015, 9, 211–229. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, J.; Li, X.; Duan, X.; Zhang, R.; Zhang, H.; Duan, X.; Zhang, R.; Zhang, H.; Ma, Y.; et al. Exploring Respiratory Motion Tracking through Electrical Impedance Tomography (EIT). IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar]
- Zhang, Z.L.; Rao, B.D. Extension of SBL algorithms for the recovery of block sparse signals with intra-block correlation. IEEE Trans. Signal Process. 2013, 61, 2009–2015. [Google Scholar] [CrossRef]
- Fang, J.; Shen, Y.N.; Li, H.B.; Wang, P. Pattern-coupled sparse Bayesian learning for recovery of block-sparse signals. IEEE Trans.Signal Process. 2013, 63, 360–372. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, Y.D.; Amin, M.G.; Himed, B. Multi-task Bayesian compressive sensing exploiting intra-task dependency. IEEE SignalProcess. Lett. 2015, 22, 430–434. [Google Scholar]
- Liu, S.; Jia, J.; Yang, Y. Image reconstruction algorithm for electrical impedance tomography based on block sparse Bayesian learning. In Proceedings of the 2017 IEEE International Conference on Imaging Systems and Techniques, Beijing, China, 18–20 October 2017; pp. 267–271. [Google Scholar]
- Liu, S.; Jia, J.; Zhang, Y.D.; Yang, Y. Image reconstruction in electrical impedance tomography based on structure-aware sparse Bayesian learning. IEEE Trans. Med. Imaging 2018, 37, 2090–2102. [Google Scholar] [CrossRef]
- Liu, S.; Wu, H.; Huang, Y.; Yang, Y.; Jia, J. Accelerated structure-aware sparse Bayesian learning for 3-D electrical impedance tomography. IEEETrans. Ind. Inf. 2019, 15, 5033–5041. [Google Scholar] [CrossRef]
- Liu, S.; Huang, Y.; Wu, H.; Tan, C.; Jia, J. Efficient multitask structure-aware sparse Bayesian learning for frequency-difference electrical impedance tomography. IEEE Trans. Ind. Inform. 2020, 17, 463–472. [Google Scholar] [CrossRef]
- Liu, S.; Cao, R.; Huang, Y.; Ouypornkochagorn, T.; Jia, J. Time sequence learning for electrical impedance tomography using Bayesian spatiotemporal priors. IEEE Trans. Instrum. Meas. 2020, 69, 6045–6057. [Google Scholar] [CrossRef]
- Dimas, C.; Uzunoglu, N.; Sotiriadis, P. An efficient Point-Matching Method-of-Moments for 2D and 3D Electrical Impedance Tomography Using Radial Basis functions. IEEE Trans. Biomed. Eng. 2021. to appear. [Google Scholar] [CrossRef]
- Somersalo, E.; Cheney, M.; Isaacson, D. Existence and uniqueness for electrode models for electric current computed tomography. SIAM J. Appl. Math. 1992, 52, 1023–1040. [Google Scholar] [CrossRef]
- Silva, O.L.; Lima, R.G.; Martins, T.C.; De Moura, F.S.; Tavares, R.S.; Tsuzuki, M.S.G. Influence of current injection pattern and electric potential measurement strategies in electrical impedance tomography. Control Eng. Pract. 2017, 58, 276–286. [Google Scholar] [CrossRef]
- Polydorides, N.; Lionheart, W.R. A Matlab toolkit for three-dimensional electrical impedance tomography: A contribution to the Electrical Impedance and Diffuse Optical Reconstruction Software project. Meas. Sci. Technol. 2002, 13, 1871–1883. [Google Scholar] [CrossRef]
- Tallman, T.N.; Gungor, S.; Wang, K.W.; Bakis, C.E. Damage detection and conductivity evolution in carbon nanofiber epoxy via electrical impedance tomography. Smart Mater. Struct. 2014, 23, 045034–045042. [Google Scholar] [CrossRef]
- Knudsen, K.; Lassas, M.; Mueller, J.L.; Siltanen, S. D-bar method for electrical impedance tomography with discontinuous conductivities. SIAM J. Appl. Math. 2007, 67, 893–913. [Google Scholar] [CrossRef]
- Hamilton, S.J. EIT Imaging of admittivities with a D-bar method and spatial prior: Experimental results for absolute and difference imaging. Physiol. Meas. 2017, 38, 1176–1192. [Google Scholar] [CrossRef] [PubMed]
- Mueller, J.L.; Siltanen, S. The D-bar method for Electrical Impedance Tomography—demystified. Inverse Probl. 2020, 36, 093001–093028. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, S.J.; Lionheart, W.R.B.; Adler, A. Comparing D-bar and common regularization-based methods for electrical impedance tomography. Physiol. Meas. 2019, 40, 044004–044010. [Google Scholar] [CrossRef]
- Stoica, P.; Babu, P. SPICE and LIKES: Two hyperparameter-free methods for sparse-parameter estimation. Signal Process. 2012, 92, 1580–1590. [Google Scholar] [CrossRef]
- Reeves, A.P.; Biancardi, A.M.; Yankelevitz, D.; Fotin, S.; Keller, B.M.; Jirapatnakul, A.; Lee, J. A public image database to support research in computer aided diagnosis. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society 2009, Minneapolis, MN, USA, 3–6 September 2009; pp. 3715–3718. [Google Scholar]
- Adler, A.; Lionheart, W.R. Uses and abuses of EIDORS: An extensible software base for EIT. Physiol. Meas. 2006, 27, S25. [Google Scholar] [CrossRef] [PubMed]
- Schöberl, J. NETGEN An advancing front 2D/3D-mesh generator based on abstract rules. Comput. Vis. Sci. 1997, 1, 41–52. [Google Scholar] [CrossRef]
- Gabriel, S.; Gabriel, C.; Corthout, E. The dielectric properties of biological tissues: I. Literature survey. Phys. Med. Biol. 1996, 68, 2231–2249. [Google Scholar] [CrossRef]
- Gabriel, S.; Lau, R.; Gabriel, C. The dielectric properties of biological tissues: II. Measurements in the frequency range 10 Hz to 20 GHz. Phys. Med. Biol. 1996, 41, 2251–2269. [Google Scholar] [CrossRef]
- Gabriel, S.; Lau, R.; Gabriel, C. The dielectric properties of biological tissues: III. parametric models for the dielectric spectrum of tissues. Phys. Med. Biol. 1996, 41, 2271–2293. [Google Scholar] [CrossRef]
- Dräger Manufacturer Brochure. Technical Datasheet: Dräger Pulmovista 500. 2010. Available online: http://www.draeger.com/sites/assets/PublishingImages/Products/rsp_pulmovista500/Attachments/rsp_pulmovista_500_pi_9066475_en.pdf (accessed on 19 November 2021).
- Swisstom AG Manufacturer Brochure. Swisstom BB2 Product Information 2st100–112, Rev.000. 2012. Available online: http://www.swisstom.com/wp-content/uploads/BB2_Brochure_2ST100-112_Rev.000_EIT_inside.pdf (accessed on 19 November 2021).
- Dimas, C.; Asimakopoulos, K.; Sotiriadis, P. A highly tunable dynamic thoracic model for Electrical Impedance Tomography. In Proceedings of the 2020 IEEE 20th International Conference on Bioinformatics and Bioengineering (BIBE), Cincinnati, OH, USA, 26–28 October 2020; pp. 961–968. [Google Scholar]
- Nopp, P.; Rapp, E.; Pfutzner, H.; Nakesch, H.; Rusham, C. Dielectric properties of lung tissue as a function of air content. Phys. Med. Biol. 1993, 38, 699–716. [Google Scholar] [CrossRef] [PubMed]
- Brown, B.H.; Seagar, A.D. The Sheffield data collection system. Clin. Phys. Physiol. Meas. 1987, 8, 91. [Google Scholar] [CrossRef] [PubMed]
- Lionheart, W.R. EIT reconstruction algorithms: Pitfalls, challenges and recent developments. Physiol. Meas. 2004, 25, 125. [Google Scholar] [CrossRef]
- Cheng, K.S.; Isaacson, D.; Newell, J.C.; Gisser, D.G. Electrode models for electric current computed tomography. IEEE Trans. Biomed. Eng. 1989, 36, 918–924. [Google Scholar] [CrossRef]
- Hanke, M.; Harrach, B.; Hyvönen, N. Justification of point electrode models in electrical impedance tomography. Math. Model. Methods Appl. Sci. 2011, 21, 1395–1413. [Google Scholar] [CrossRef]
- Dimas, C.; Alimisis, V.; Georgakopoulos, I.; Voudoukis, N.; Uzunoglu, N.; Sotiriadis, P.P. Evaluation of Thoracic Equivalent Multiport Circuits Using an Electrical Impedance Tomography Hardware Simulation Interface. Technologies 2021, 9, 58. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, D.; Yerworth, R.; Demosthenous, A. An Imaged-Based Method for Universal Performance Evaluation of Electrical Impedance Tomography Systems. IEEE Trans. Biomed. Circuits Syst. 2021, 15, 464–473. [Google Scholar] [CrossRef] [PubMed]
- Guardo, R.; Boulay, C.; Savoie, G.; Adler, A. A superheterodyne serial data acquisition system for Electrical Impedance Tomography. In Proceedings of the 15th Annual International Conference of the IEEE Engineering in Medicine and Biology Societ, San Diego, CA, USA, 30–31 October 1993. [Google Scholar]
- Graham, B.M.; Adler, A. Objective selection of hyperparameter for EIT. Physiol. Meas. 2006, 27, S65–S79. [Google Scholar] [CrossRef] [PubMed]
- Darbas, M.; Heleine, J.; Mendoza, R.; Velasco, A.C. Sensitivity analysis of the complete electrode model for electrical impedance tomography. AIMS Math. 2021, 6, 7333–7366. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tissue | at 100 kHz () | at 100 kHz () |
|---|---|---|
| Heart | ||
| Deflated Lung | ||
| Lung State 2 | ||
| Lung State 3 | ||
| Lung State 4 | ||
| Inflated Lung | ||
| Bones | ||
| Skin & Fat | ||
| Muscle (Background) |
| Model | No of Elements () | No of Nodes () |
|---|---|---|
| Case I, deflated state | 133,529 | 27,328 |
| Case I, state 2 | 139,486 | 28,374 |
| Case I, state 3 | 139,798 | 28,433 |
| Case I, state 4 | 142,070 | 28,814 |
| Case I, inflated state | 146,000 | 29,542 |
| Case II, deflated state | 144,329 | 29,125 |
| Case II, state 2 | 147,838 | 29,815 |
| Case II, state 3 | 146,871 | 29,688 |
| Case II, state 4 | 149,887 | 30,219 |
| Case II, inflated state | 150,775 | 30,359 |
| Case III, deflated state | 158,855 | 31,791 |
| Case III, state 2 | 158,392 | 31768 |
| Case III, state 3 | 159,185 | 31,937 |
| Case III, state 4 | 159,550 | 31,984 |
| Case III, inflated state | 160,349 | 32,159 |
| Algorithm | h | |||
|---|---|---|---|---|
| Movement Prior | − | − | ||
| Gauss–Newton (GN) | − | − | − | |
| Total Variation (TV) | − | − | ||
| Difference of Absolute Images | − | − | − | |
| Multiple Priors (N.L.D.) | − | − | ||
| PM-MoM Laplace | − | − | − | |
| PM-MoM SBL | − | − | − | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dimas, C.; Alimisis, V.; Uzunoglu, N.; Sotiriadis, P.P. A Point-Matching Method of Moment with Sparse Bayesian Learning Applied and Evaluated in Dynamic Lung Electrical Impedance Tomography. Bioengineering 2021, 8, 191. https://doi.org/10.3390/bioengineering8120191
Dimas C, Alimisis V, Uzunoglu N, Sotiriadis PP. A Point-Matching Method of Moment with Sparse Bayesian Learning Applied and Evaluated in Dynamic Lung Electrical Impedance Tomography. Bioengineering. 2021; 8(12):191. https://doi.org/10.3390/bioengineering8120191
Chicago/Turabian StyleDimas, Christos, Vassilis Alimisis, Nikolaos Uzunoglu, and Paul P. Sotiriadis. 2021. "A Point-Matching Method of Moment with Sparse Bayesian Learning Applied and Evaluated in Dynamic Lung Electrical Impedance Tomography" Bioengineering 8, no. 12: 191. https://doi.org/10.3390/bioengineering8120191
APA StyleDimas, C., Alimisis, V., Uzunoglu, N., & Sotiriadis, P. P. (2021). A Point-Matching Method of Moment with Sparse Bayesian Learning Applied and Evaluated in Dynamic Lung Electrical Impedance Tomography. Bioengineering, 8(12), 191. https://doi.org/10.3390/bioengineering8120191