Correlating Grip Force Signals from Multiple Sensors Highlights Prehensile Control Strategies in a Complex Task-User System


Abstract

1. Introduction
2. Materials and Methods
2.1. Slave Robotic System
2.2. Master/Slave Control
2.3. Sensor Glove Design
2.3.1. Hardware
2.3.2. Software
2.4. Experimental Precision Grip Task
2.5. Definition of Task Expertise
3. Results
3.1. Data Preprocessing
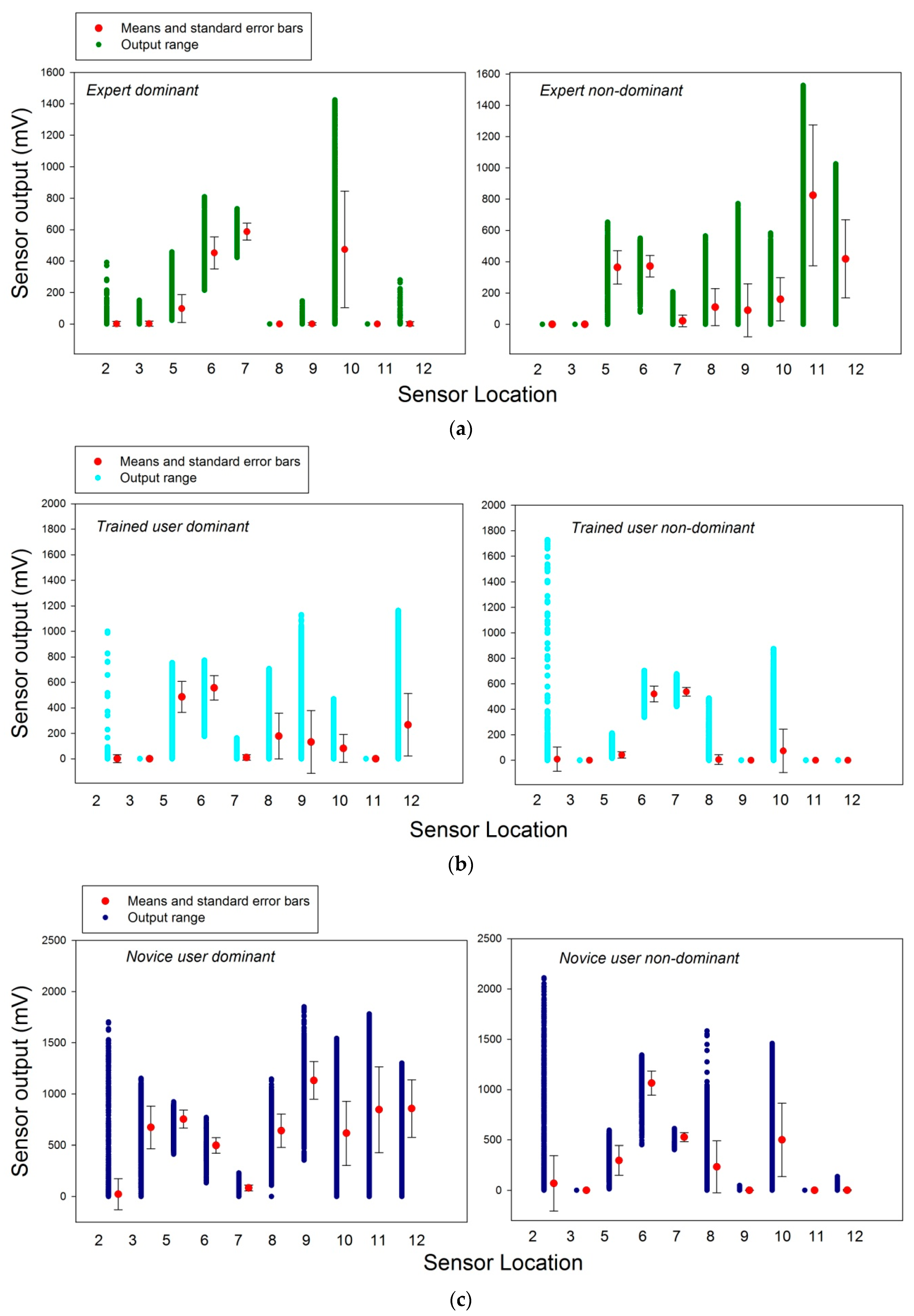
3.2. Descriptive Analyses
3.3. Analysis of Variance
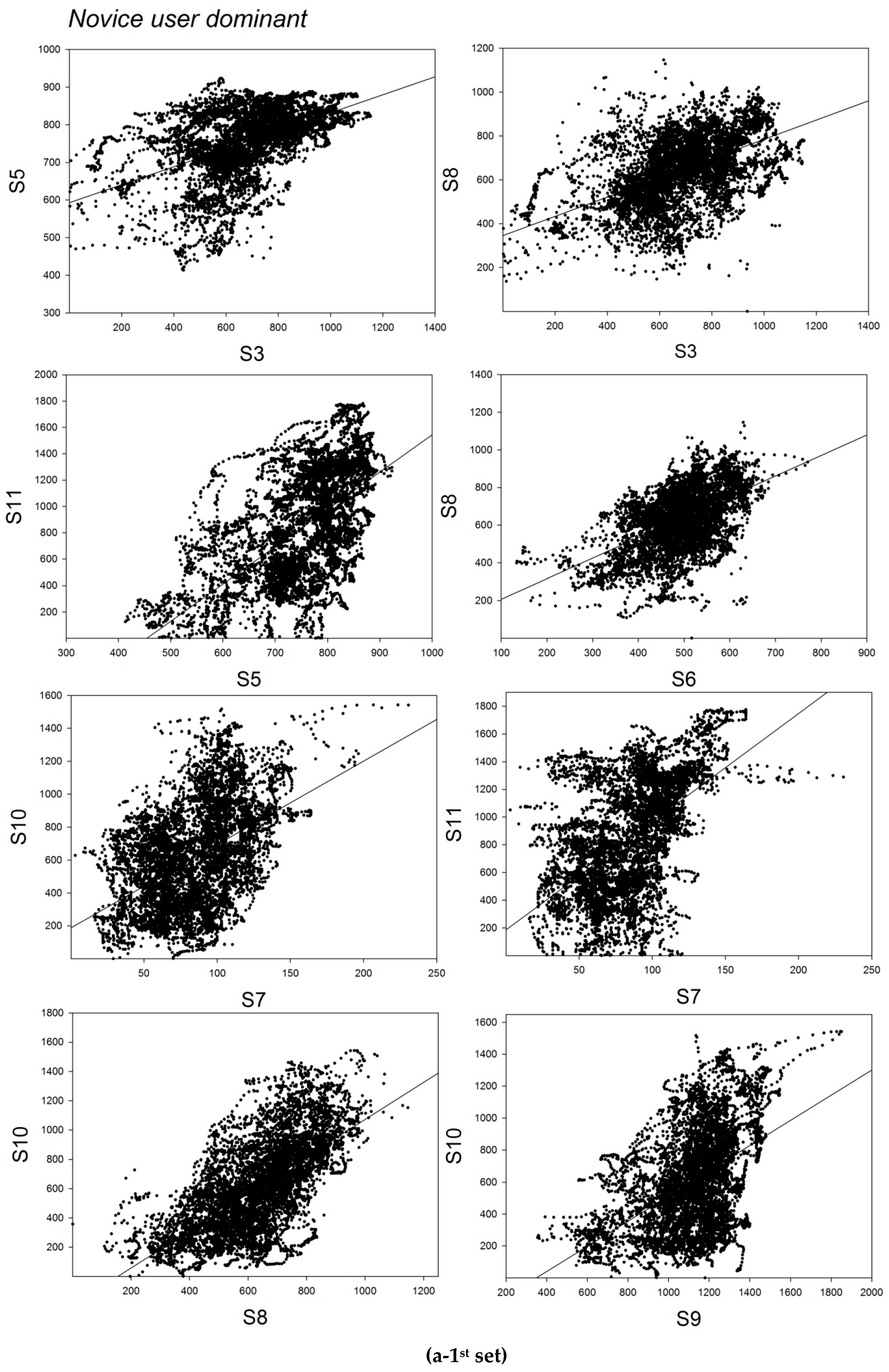
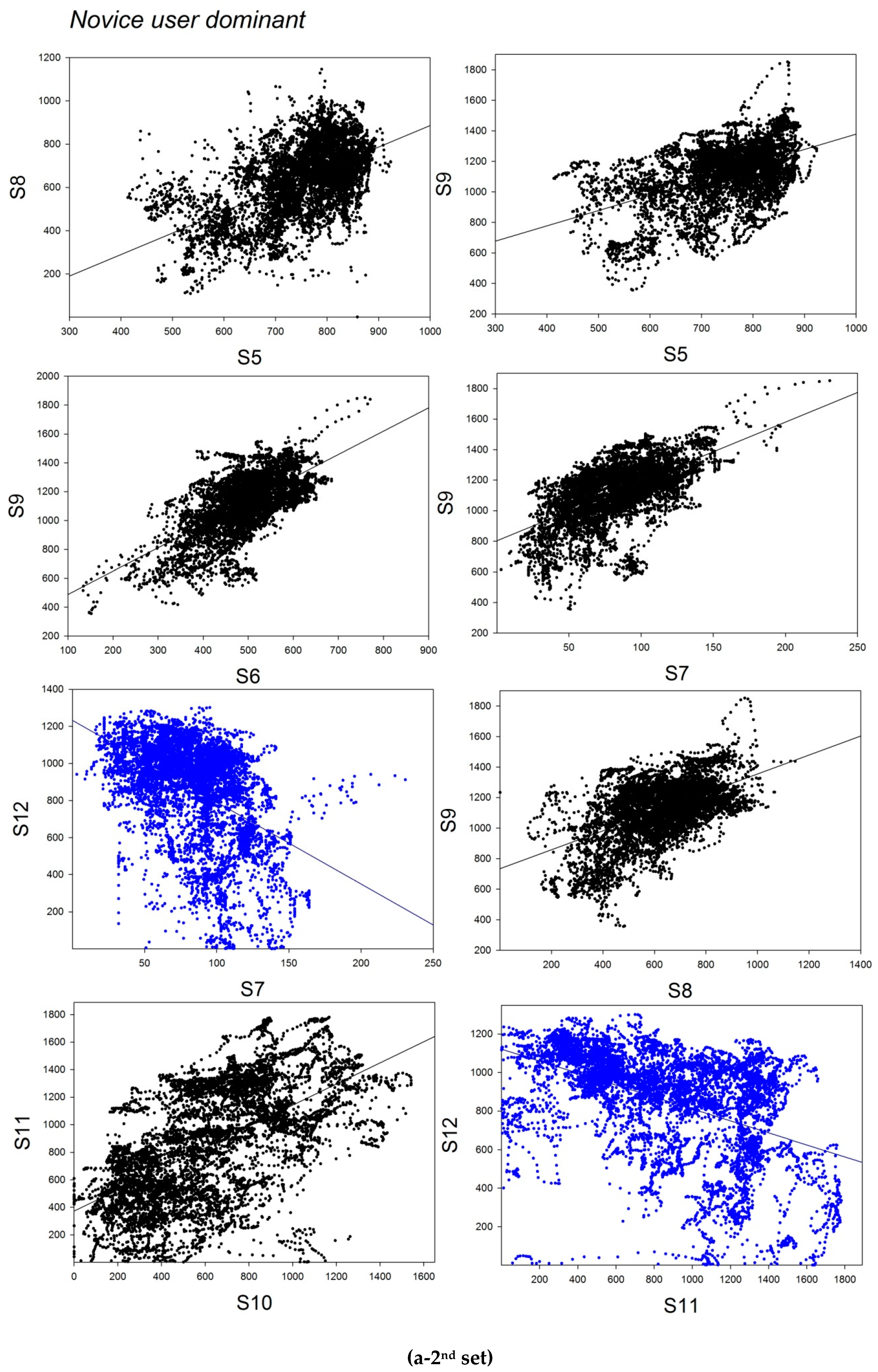
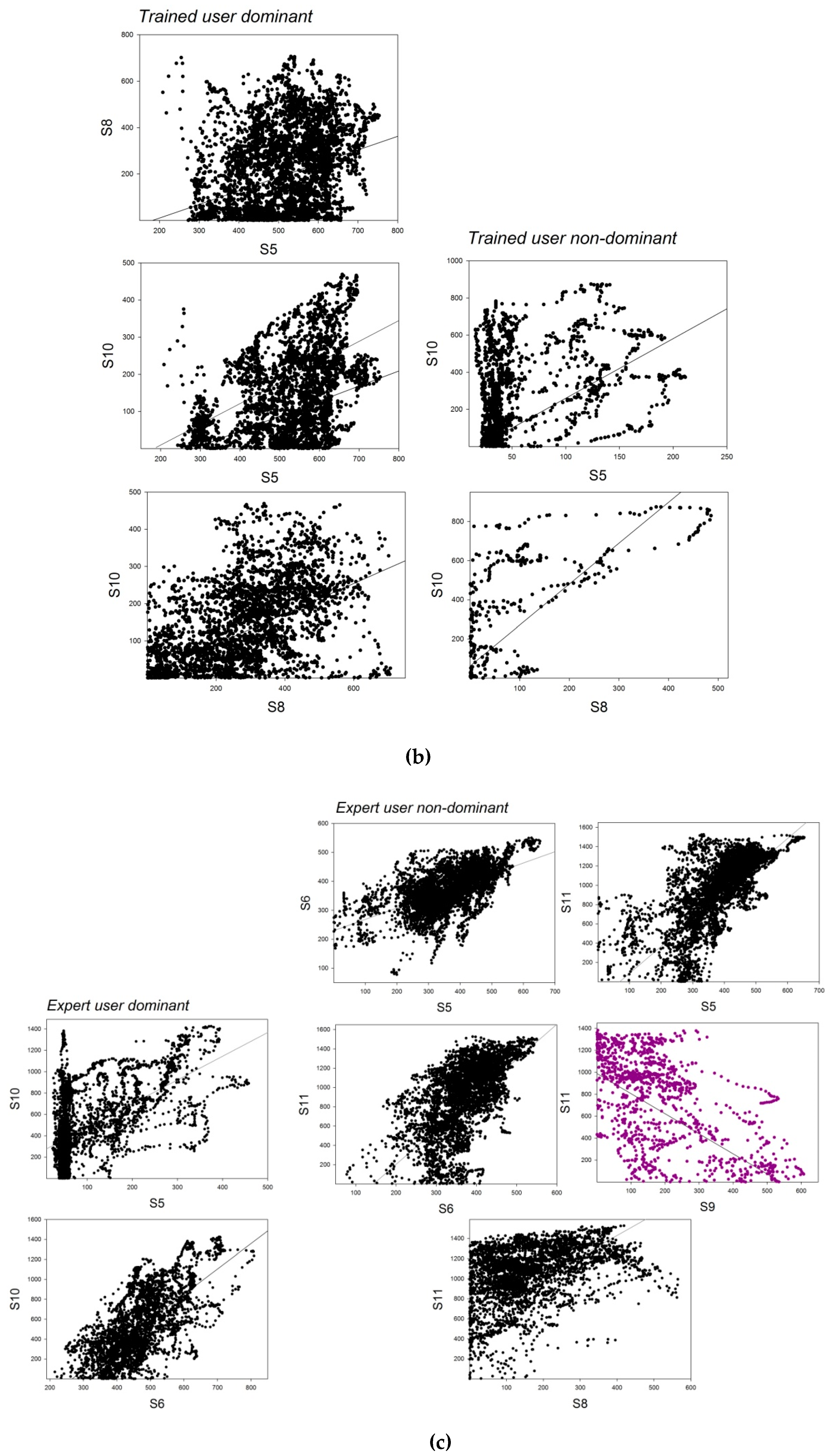
3.4. Correlation Analyses
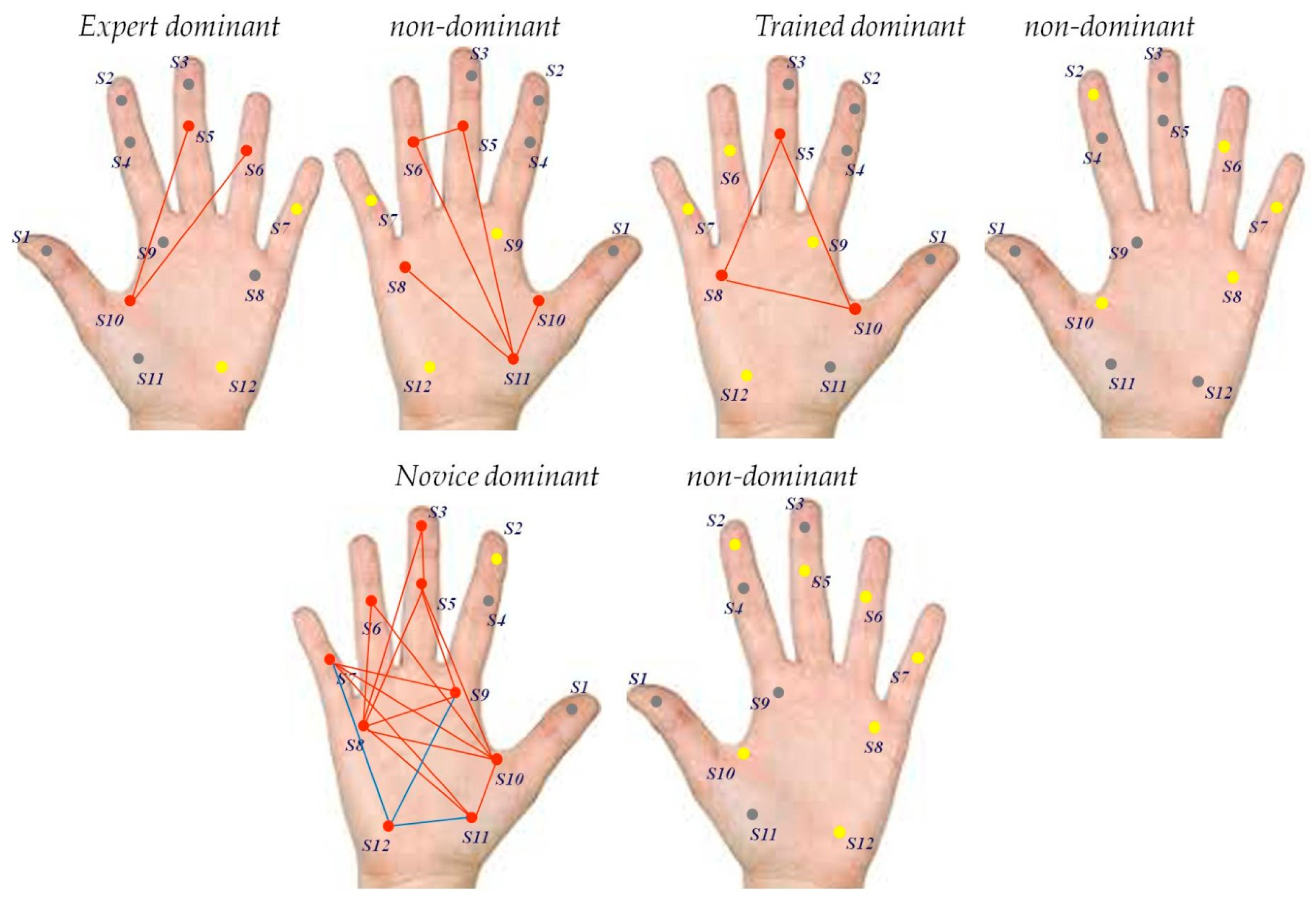
3.5. Functional Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Di Rienzo, M.; Mukkamala, R. Special Issue on Wearable and Nearable Biosensors and Systems for Healthcare. Sensors 2019. Available online: https://www.mdpi.com/journal/sensors/special_issues/Nearable# (accessed on 11 September 2020).
- Tukey, J.W. Exploratory data analysis. Methods 1977, 2, 131–160, reprinted for sale in 2019. [Google Scholar]
- Kinoshita, H.; Murase, T.; Bandou, T. Grip posture and forces during holding cylindrical objects with circular grips. Ergonomics 1996, 39, 1163–1176. [Google Scholar] [CrossRef] [PubMed]
- Kinoshita, H.; Kawai, S.; Ikuta, K. Contributions and co-ordination of individual fingers in multiple finger prehension. Ergonomics 1995, 38, 1212–1230. [Google Scholar] [CrossRef] [PubMed]
- Latash, M.L.; Zatsiorsky, V.M. Multi-finger prehension: Control of a redundant mechanical system. Adv. Exp. Med. Biol. 2009, 629, 597–618. [Google Scholar]
- Oku, T.; Furuya, S. Skilful force control in expert pianists. Exp. Brain Res. 2017, 235, 1603–1615. [Google Scholar] [CrossRef]
- Zatsiorsky, V.M.; Latash, M.L. Multifinger prehension: An overview. J. Mot. Behav. 2008, 40, 446–476. [Google Scholar] [CrossRef]
- Sun, Y.; Park, J.; Zatsiorsky, V.M.; Latash, M.L. Prehension synergies during smooth changes of the external torque. Exp. Brain Res. 2011, 213, 493–506. [Google Scholar] [CrossRef]
- Li, Z.M.; Latash, M.L.; Zatsiorsky, V.M. Force sharing among fingers as a model of the redundancy problem. Exp. Brain Res. 1998, 119, 276–286. [Google Scholar] [CrossRef]
- Cha, S.M.; Shin, H.D.; Kim, K.C.; Park, J.W. Comparison of grip strength among six grip methods. J. Hand. Surg. Am. 2014, 39, 2277–2284. [Google Scholar] [CrossRef]
- Cai, A.; Pingel, I.; Lorz, D.; Beier, J.P.; Horch, R.E.; Arkudas, A. Force distribution of a cylindrical grip differs between dominant and nondominant hand in healthy subjects. Arch. Orthop. Trauma Surg. 2018, 138, 1323–1331. [Google Scholar] [CrossRef]
- Buenaventura Castillo, C.; Lynch, A.G.; Paracchini, S. Different laterality indexes are poorly correlated with one another but consistently show the tendency of males and females to be more left- and right-lateralized, respectively. R. Soc. Open Sci. 2020, 7, 191700. [Google Scholar] [CrossRef] [PubMed]
- Parsons, L.M.; Gabrieli, J.D.; Phelps, E.A.; Gazzaniga, M.S. Cerebrally lateralized mental representations of hand shape and movement. J. Neurosci. 1998, 18, 6539–6548. [Google Scholar] [CrossRef] [PubMed]
- Davare, M.; Andres, M.; Clerget, E.; Thonnard, J.L.; Olivier, E. Temporal dissociation between hand shaping and grip force scaling in the anterior intraparietal area. J. Neurosci. 2007, 27, 3974–3980. [Google Scholar] [CrossRef]
- Wilson, S.; Moore, C. S1 somatotopic maps. Scholarpedia 2015, 10, 8574. [Google Scholar] [CrossRef]
- Braun, C.; Heinz, U.; Schweizer, R.; Wiech, K.; Birbaumer, N.; Topka, H. Dynamic organization of the somatosensory cortex induced by motor activity. Brain 2001, 124, 2259–2267. [Google Scholar] [CrossRef] [PubMed]
- Arber, S. Motor circuits in action: Specification, connectivity, and function. Neuron 2012, 74, 975–989. [Google Scholar] [CrossRef]
- Tripodi, M.; Arber, S. Regulation of motor circuit assembly by spatial and temporal mechanisms. Curr. Opin. Neurobiol. 2012, 22, 615–623. [Google Scholar] [CrossRef]
- Weiss, T.; Miltner, W.H.; Huonker, R.; Friedel, R.; Schmidt, I.; Taub, E. Rapid functional plasticity of the somatosensory cortex after finger amputation. Exp. Brain Res. 2000, 134, 199–203. [Google Scholar] [CrossRef]
- Dresp-Langley, B. Seven Properties of Self-Organization in the Human Brain. Big Data Cogn. Comput. 2020, 4, 10. [Google Scholar] [CrossRef]
- Olman, C.A.; Pickett, K.A.; Schallmo, M.P.; Kimberley, T.J. Selective BOLD responses to individual finger movement measured with fMRI at 3T. Hum. Brain Mapp. 2012, 33, 1594–1606. [Google Scholar] [CrossRef]
- Schellekens, W.; Petridou, N.; Ramsey, N.F. Detailed somatotopy in primary motor and somatosensory cortex revealed by Gaussian population receptive fields. NeuroImage 2018, 179, 337–347. [Google Scholar] [CrossRef] [PubMed]
- Batmaz, A.U.; Falek AMZorn, L.; Nageotte, F.; Zanne, P.; de Mathelin, M.; Dresp-Langley, B. Novice and expert behavior while using a robot controlled surgery system. In Proceedings of the 2017 13th IASTED International Conference on Biomedical Engineering (BioMed), Innsbruck, Austria, 21 February 2017; pp. 94–99. [Google Scholar]
- de Mathelin, M.; Nageotte, F.; Zanne, P.; Dresp-Langley, B. Sensors for Expert Grip Force Profiling: Towards Benchmarking Manual Control of a Robotic Device for Surgical Tool Movements. Sensors 2019, 19, 4575. [Google Scholar] [CrossRef] [PubMed]
- Zorn, L.; Nageotte, F.; Zanne, P.; Legner, A.; Dallemagne, B.; Marescaux, J.; de Mathelin, M. A novel telemanipulated robotic assistant for surgical endoscopy: Preclinical application to ESD. IEEE Trans. Biomed. Eng. 2018, 65, 797–808. [Google Scholar] [CrossRef]
- Nageotte, F.; Zorn, L.; Zanne, P.; de Mathelin, M. STRAS: A modular and flexible telemanipulated robotic device for intraluminal surgery. In Handbook of Robotic and Image-Guided Surgery; Elsevier: Amsterdam, The Netherlands, 2020; pp. 123–146. [Google Scholar]
- Batmaz, A.U.; de Mathelin, M.; Dresp-Langley, B. Seeing virtual while acting real: Visual display and strategy effects on the time and precision of eye-hand coordination. PLoS ONE 2017, 12, e0183789. [Google Scholar] [CrossRef]
- Dresp-Langley, B. Principles of perceptual grouping: Implications for image-guided surgery. Front. Psychol. 2015, 6, 1565. [Google Scholar] [CrossRef] [PubMed]
- Dresp-Langley, B. Towards Expert-Based Speed–Precision Control in Early Simulator Training for Novice Surgeons. Information 2018, 9, 316. [Google Scholar] [CrossRef]
- Dresp-Langley, B. Why the Brain Knows More than We Do: Non-Conscious Representations and Their Role in the Construction of Conscious Experience. Brain Sci. 2012, 2, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Dresp-Langley, B.; Monfouga, M. Combining Visual Contrast Information with Sound Can Produce Faster Decisions. Information 2019, 10, 346. [Google Scholar] [CrossRef]
- Dresp, B. Local brightness mechanisms sketch out surfaces but do not fill them in: Psychophysical evidence in the Kanizsa square. Percept Psychophys. 1992, 52, 562–570. [Google Scholar] [CrossRef]
- Karageorghis, C.I.; Cheek, P.; Simpson, S.D.; Bigliassi, M. Interactive effects of music tempi and intensities on grip strength and subjective affect. Scand. J. Med. Sci. Sports 2018, 28, 1166–1175. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Incidents | |||
|---|---|---|---|---|
| dominant | non-dominant | dominant | non-dominant | |
| Novice | 15.42 | 12.99 | 20 | 28 |
| Trained | 11.90 | 13.53 | 6 | 8 |
| Expert | 8.88 | 10.19 | 3 | 0 |
| Source of Variation | DF | SS | MS | F | P | |
|---|---|---|---|---|---|---|
| S2 | User | 2 | 16,773,987.886 | 8,386,993.943 | 427.929 | <0.001 |
| Hand | 1 | 2,964,227.230 | 2,964,227.230 | 151.244 | <0.001 | |
| User × Hand | 2 | 3,755,368.124 | 1,877,684.062 | 95.805 | <0.001 | |
| Residual | 38,271 | 750,074,008.984 | 19,599.018 | |||
| Total | 38,276 | 3,357,894,773.041 | 87,728.466 | |||
| S3 | User | 2 | 1,015,096,423.250 | 507,548,211.625 | 53,513.867 | <0.001 |
| Hand | 1 | 461,998,520.386 | 461,998,520.386 | 48,711.289 | <0.001 | |
| User × Hand | 2 | 1,021,778,383.168 | 510,889,191.584 | 53,866.127 | <0.001 | |
| Residual | 38,271 | 362,978,394.485 | 9484.424 | |||
| Total | 38,276 | 3,357,894,773.041 | 87,728.466 | |||
| S5 | User | 2 | 689,902,030.446 | 344,951,015.223 | 32,517.606 | <0.001 |
| Hand | 1 | 1,395,424,378.812 | 1,395,424,378.812 | 131,542.911 | <0.001 | |
| User × Hand | 2 | 64,882,104.607 | 32,441,052.303 | 3058.131 | <0.001 | |
| Residual | 38,271 | 405,983,767.489 | 10,608.131 | |||
| Total | 38,276 | 2,828,192,985.527 | 73889.460 | |||
| S6 | User | 2 | 894,178,539.095 | 447,089,269.547 | 58,203.191 | <0.001 |
| Hand | 1 | 380,801,423.473 | 380,801,423.473 | 49,573.674 | <0.001 | |
| User × Hand | 2 | 695,805,856.940 | 347,902,928.470 | 45,290.867 | <0.001 | |
| Residual | 38,271 | 293,979,646.508 | 7681.525 | |||
| Total | 38,276 | 2,235,427,686.091 | 58,402.855 | |||
| S7 | User | 2 | 8,131,916.849 | 4,065,958.425 | 2996.062 | <0.001 |
| Hand | 1 | 2,415,730,452.996 | 2,415,730,452.996 | 1,780,067.111 | <0.001 | |
| User × Hand | 2 | 25,823,790.450 | 12,911,895.225 | 9514.323 | <0.001 | |
| Residual | 38,271 | 51,937,603.692 | 1357.101 | |||
| Total | 38,276 | 2,482,530,139.867 | 64,858.662 | |||
| S8 | User | 2 | 1,182,330,765.802 | 591,165,382.901 | 24,162.125 | <0.001 |
| Hand | 1 | 488,723,290.475 | 488,723,290.475 | 19,975.110 | <0.001 | |
| User × Hand | 2 | 162,302,567.526 | 81,151,283.763 | 3316.817 | <0.001 | |
| Residual | 38,271 | 936,361,775.619 | 24,466.614 | |||
| Total | 38,276 | 3,051,959,544.861 | 79,735.593 | |||
| S9 | User | 2 | 2,331,382,489.784 | 1,165,691,244.892 | 54,035.820 | <0.001 |
| Hand | 1 | 1,875,323,478.829 | 1,875,323,478.829 | 86,930.946 | <0.001 | |
| User × Hand | 2 | 2,332,903,972.891 | 1,166,451,986.446 | 54,071.085 | <0.001 | |
| Residual | 38,271 | 825603632.161 | 21,572.565 | |||
| Total | 38,276 | 8,721,314,740.557 | 227,853.348 | |||
| S10 | User | 2 | 1,576,444,413.907 | 788,222,206.954 | 11,233.344 | <0.001 |
| Hand | 1 | 36,558,031.549 | 36,558,031.549 | 521.007 | <0.001 | |
| User × Hand | 2 | 292,642,407.935 | 146,321,203.967 | 2085.296 | <0.001 | |
| Residual | 38,271 | 26,854,02745.672 | 70,168.084 | |||
| Total | 38,276 | 4,653,698,608.118 | 121,582.679 | |||
| S11 | User | 2 | 1,479,234,266.725 | 739,617,133.363 | 10,404.163 | <0.001 |
| Hand | 1 | 2,866,636,795.456 | 2,866,636,795.456 | 40,324.860 | <0.001 | |
| User × Hand | 2 | 1,479,234,266.725 | 739,617,133.363 | 10,404.163 | <0.001 | |
| Residual | 38,271 | 2,720,630,817.886 | 71,088.574 | |||
| Total | 38,276 | 9,064,486,828.465 | 236,819.073 | |||
| S12 | User | 2 | 647,731,602.199 | 323,865,801.100 | 8786.483 | <0.001 |
| Hand | 1 | 2,434,904,432.621 | 2,434,904,432.621 | 66,058.985 | <0.001 | |
| User × Hand | 2 | 647,217,679.584 | 323,608,839.792 | 8779.511 | <0.001 | |
| Residual | 38,271 | 1,410,651,827.906 | 36,859.550 | |||
| Total | 38,276 | 5,733,258,645.998 | 149,787.299 |
| NOVICE USER dominant hand | ||||||||
| S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | |
| S3 | 0.55 p < 0.05 | 0.57 p < 0.05 | ||||||
| S5 | 0.54 p < 0.05 | 0.48 p < 0.05 | 0.42 p < 0.06 | 0.60 p < 0.01 | ||||
| S6 | 0.50 p < 0.05 | 0.65 p < 0.01 | 0.44 p < 0.05 | |||||
| S7 | 0.60 p < 0.05 | 0.47 p < 0.05 | 0.54 p < 0.05 | −0.45 p < 0.05 | ||||
| S8 | 0.55 p < 0.05 | 0.66 p < 0.01 | 0.36 p < 0.06 | |||||
| S9 | 0.46 p < 0.05 | 0.39 p < 0.06 | −0.35 p < 0.06 | |||||
| S10 | 0.58 p < 0.01 | |||||||
| S11 | −0.46 p < 0.05 | |||||||
| TRAINED USER dominant hand | ||||||||
| S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | |
| S5 | 0.46 p < 0.05 | 0.48 p < 0.05 | ||||||
| S8 | 0.67 p < 0.01 | |||||||
| EXPERT USER dominant and non-dominant hands | ||||||||
| S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | |
| S5 | 0.62 p < 0.001 | 0.53 p < 0.01 | 0.67 p < 0.001 | |||||
| S6 | 0.70 p < 0.001 | 0.55 p < 0.001 | ||||||
| S8 | 0.55 p < 0.01 | |||||||
| S10 | −0.69 p < 0.01 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dresp-Langley, B.; Nageotte, F.; Zanne, P.; Mathelin, M.d. Correlating Grip Force Signals from Multiple Sensors Highlights Prehensile Control Strategies in a Complex Task-User System. Bioengineering 2020, 7, 143. https://doi.org/10.3390/bioengineering7040143
Dresp-Langley B, Nageotte F, Zanne P, Mathelin Md. Correlating Grip Force Signals from Multiple Sensors Highlights Prehensile Control Strategies in a Complex Task-User System. Bioengineering. 2020; 7(4):143. https://doi.org/10.3390/bioengineering7040143
Chicago/Turabian StyleDresp-Langley, Birgitta, Florent Nageotte, Philippe Zanne, and Michel de Mathelin. 2020. "Correlating Grip Force Signals from Multiple Sensors Highlights Prehensile Control Strategies in a Complex Task-User System" Bioengineering 7, no. 4: 143. https://doi.org/10.3390/bioengineering7040143
APA StyleDresp-Langley, B., Nageotte, F., Zanne, P., & Mathelin, M. d. (2020). Correlating Grip Force Signals from Multiple Sensors Highlights Prehensile Control Strategies in a Complex Task-User System. Bioengineering, 7(4), 143. https://doi.org/10.3390/bioengineering7040143