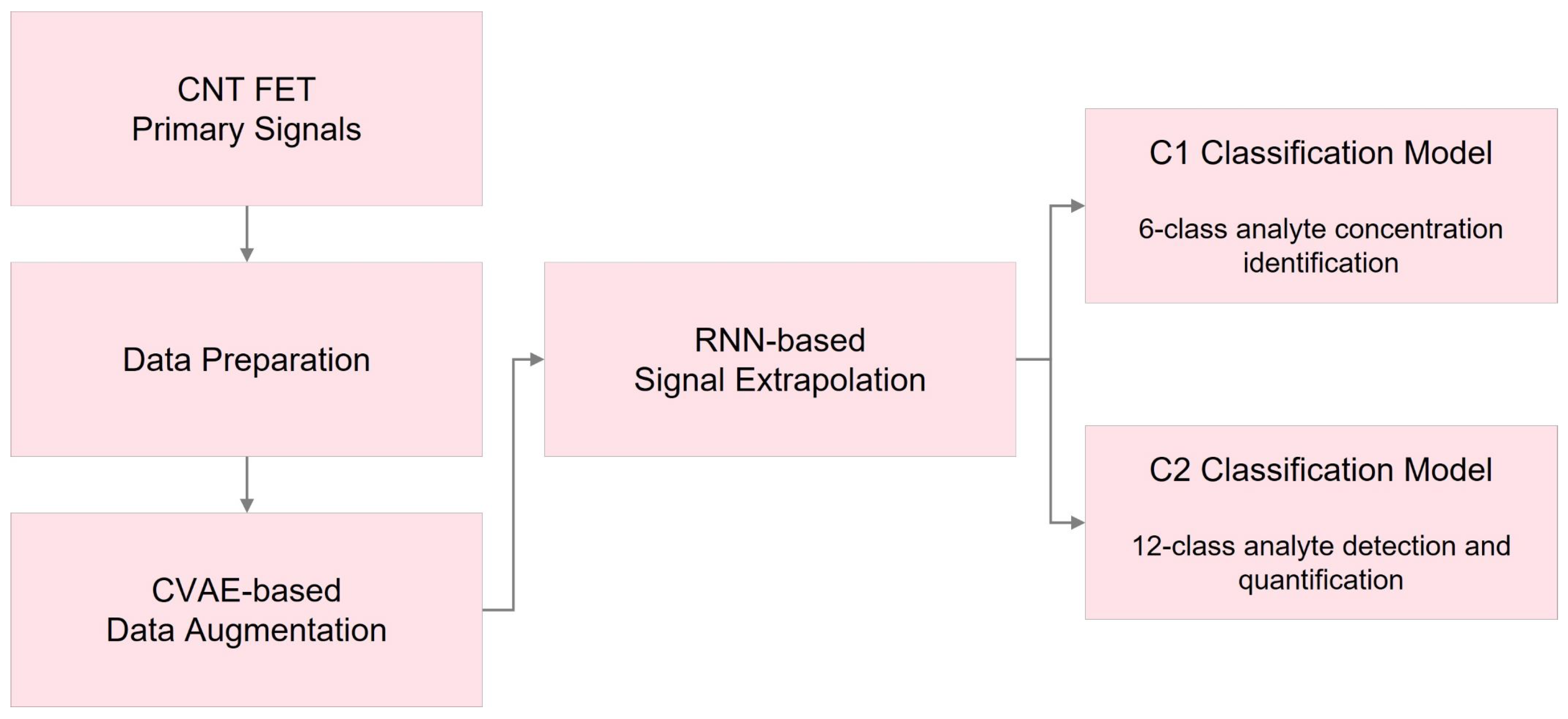
Figure 1.
Workflow of the proposed deep learning techniques in this study.
Figure 1.
Workflow of the proposed deep learning techniques in this study.
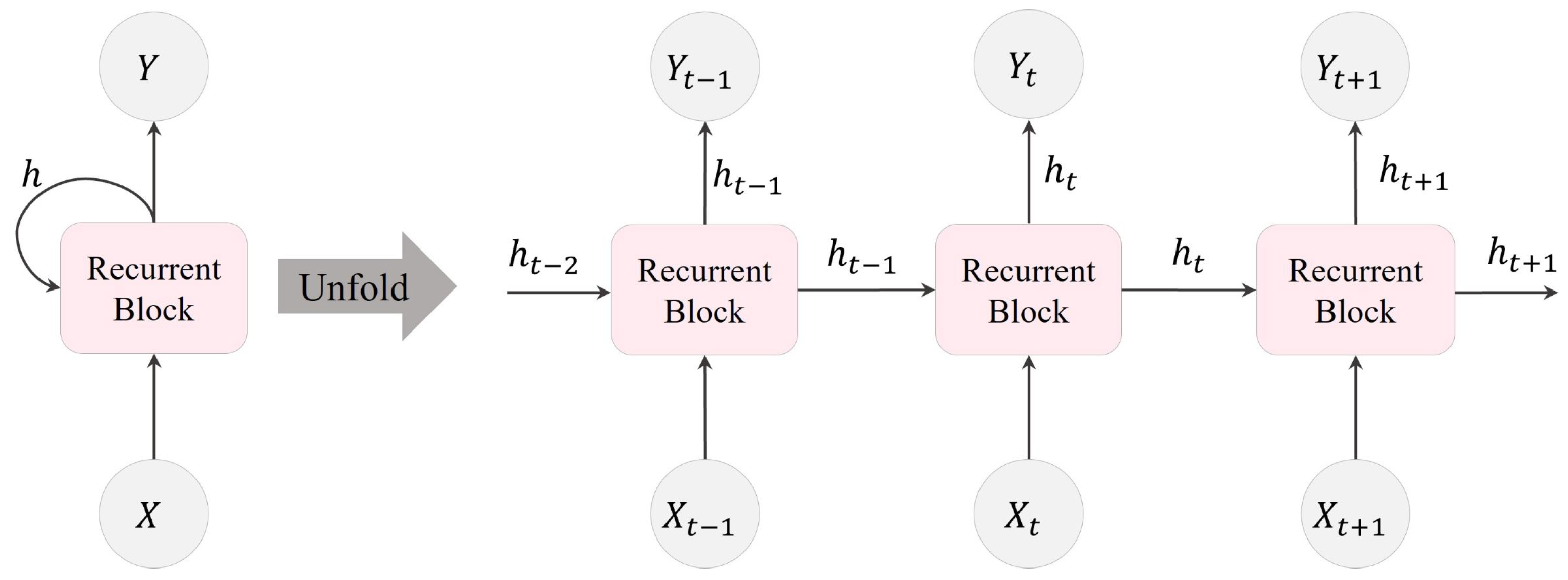
Figure 2.
Visualization of an RNN unfolded in time, illustrating the transmission of information within an RNN layer over three consecutive time steps.
Figure 2.
Visualization of an RNN unfolded in time, illustrating the transmission of information within an RNN layer over three consecutive time steps.
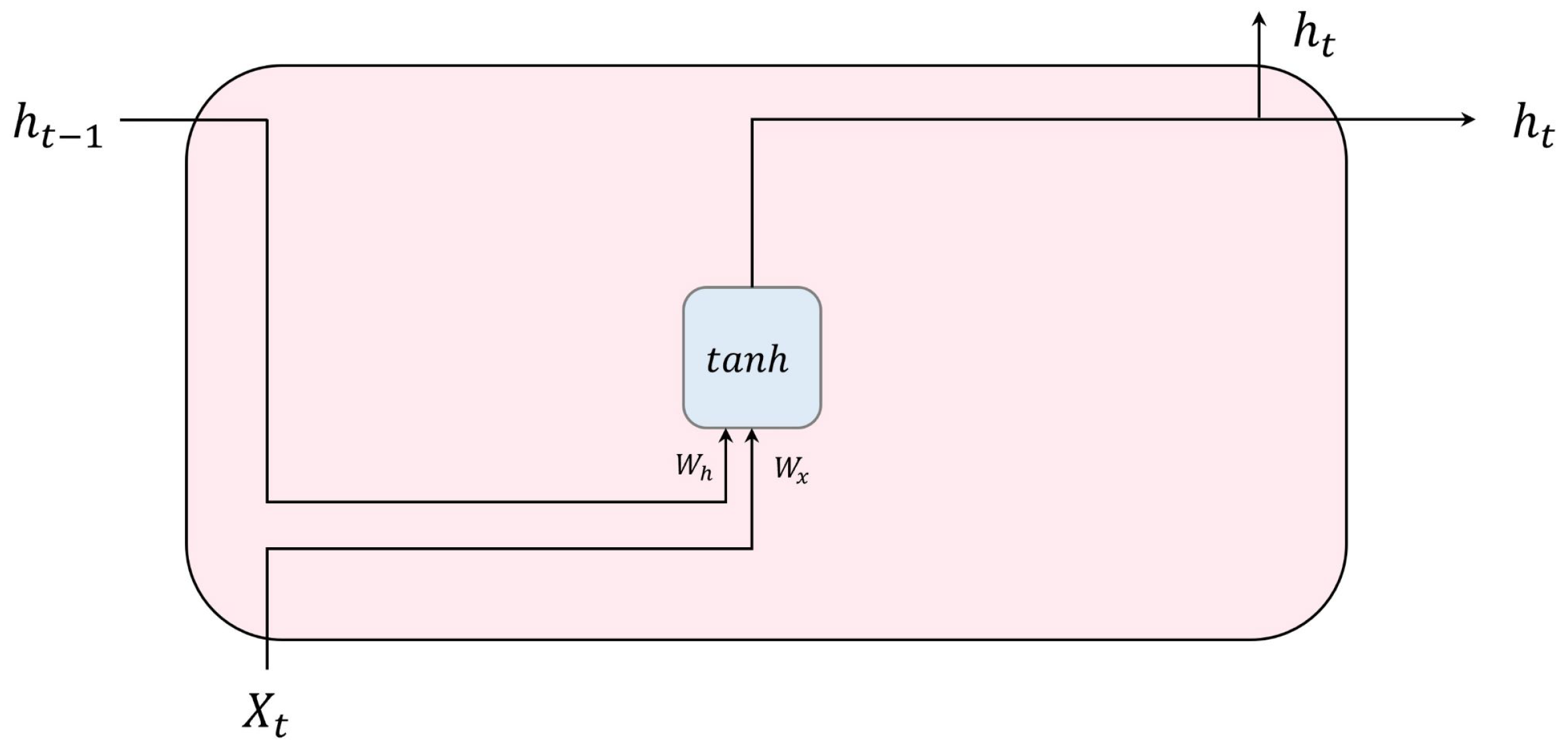
Figure 3.
Structure of a vanilla RNN unit using a hyperbolic tangent function as its activation function.
Figure 3.
Structure of a vanilla RNN unit using a hyperbolic tangent function as its activation function.
Figure 4.
Structure of an LSTM unit or an LSTM hidden unit (⊕ and ⊙ refer to element-wise addition and multiplication, respectively).
Figure 4.
Structure of an LSTM unit or an LSTM hidden unit (⊕ and ⊙ refer to element-wise addition and multiplication, respectively).
Figure 5.
Transmission of data within an LSTM layer: (a) a ULSTM layer with forward states, and (b) a BLSTM layer with both forward and backward states. Here, X, Y, , and represent the input, output, forward and backward states in the BLSTM layer, respectively.
Figure 5.
Transmission of data within an LSTM layer: (a) a ULSTM layer with forward states, and (b) a BLSTM layer with both forward and backward states. Here, X, Y, , and represent the input, output, forward and backward states in the BLSTM layer, respectively.
Figure 6.
Illustration of GRU structure (⊕ and ⊙ refer to element-wise addition and multiplication, respectively).
Figure 6.
Illustration of GRU structure (⊕ and ⊙ refer to element-wise addition and multiplication, respectively).
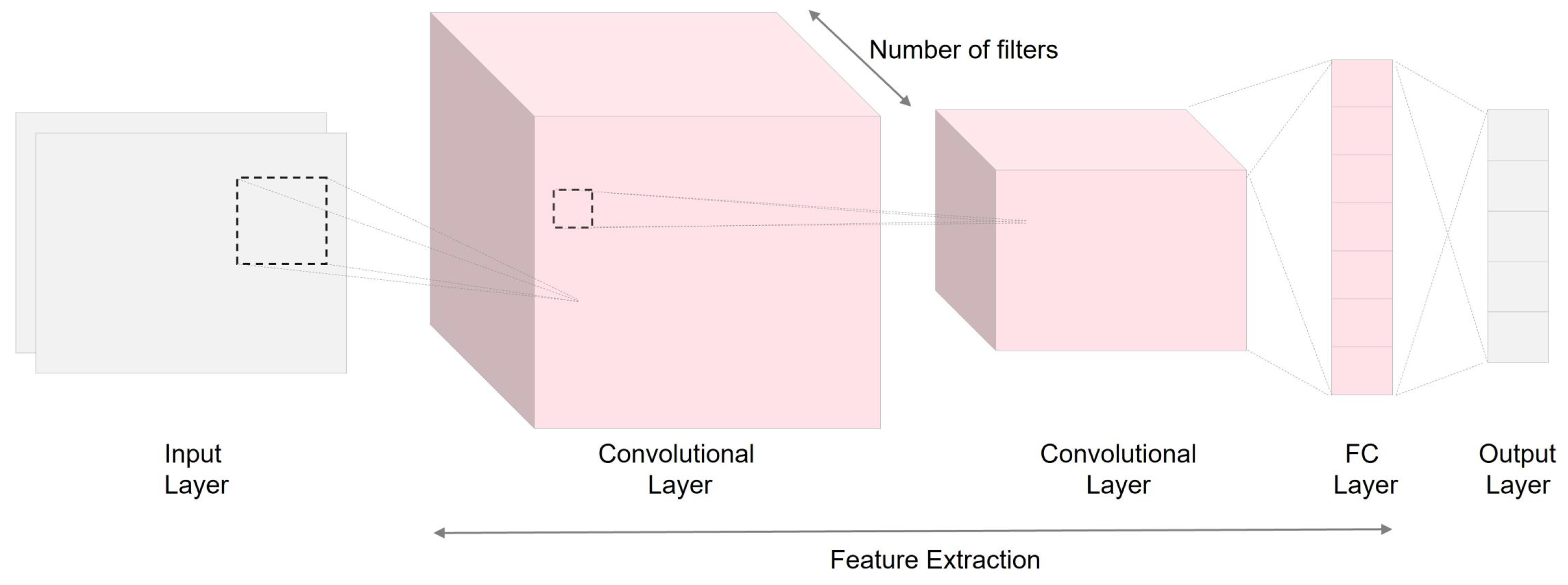
Figure 7.
A typical structure of CNN.
Figure 7.
A typical structure of CNN.
Figure 8.
Ilustration of a variational autoencoder (VAE) network architecture.
Figure 8.
Ilustration of a variational autoencoder (VAE) network architecture.
Figure 9.
Illustration of conditional variational autoencoder (CVAE) network architecture that integrates conditional information for enhanced generative modeling.
Figure 9.
Illustration of conditional variational autoencoder (CVAE) network architecture that integrates conditional information for enhanced generative modeling.
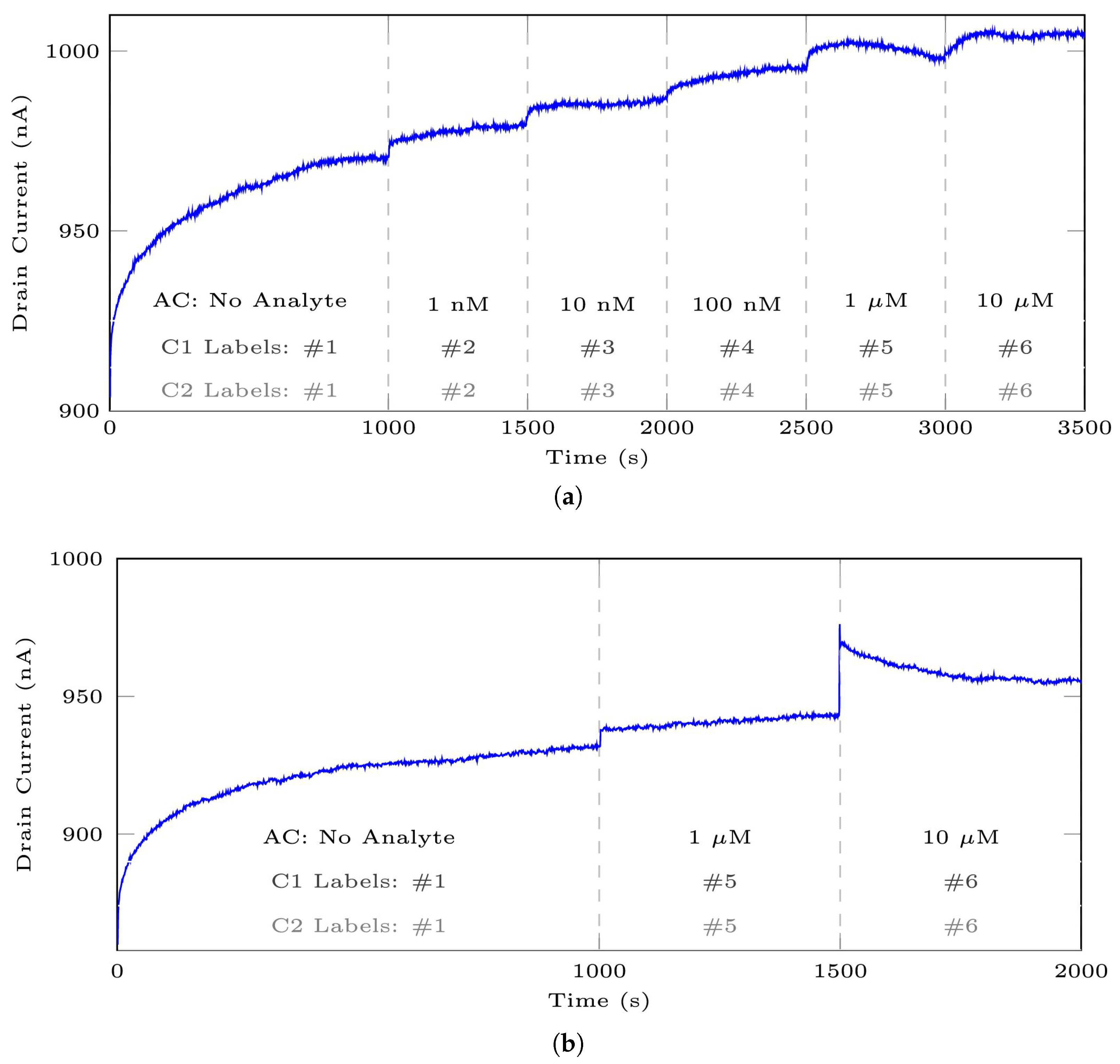
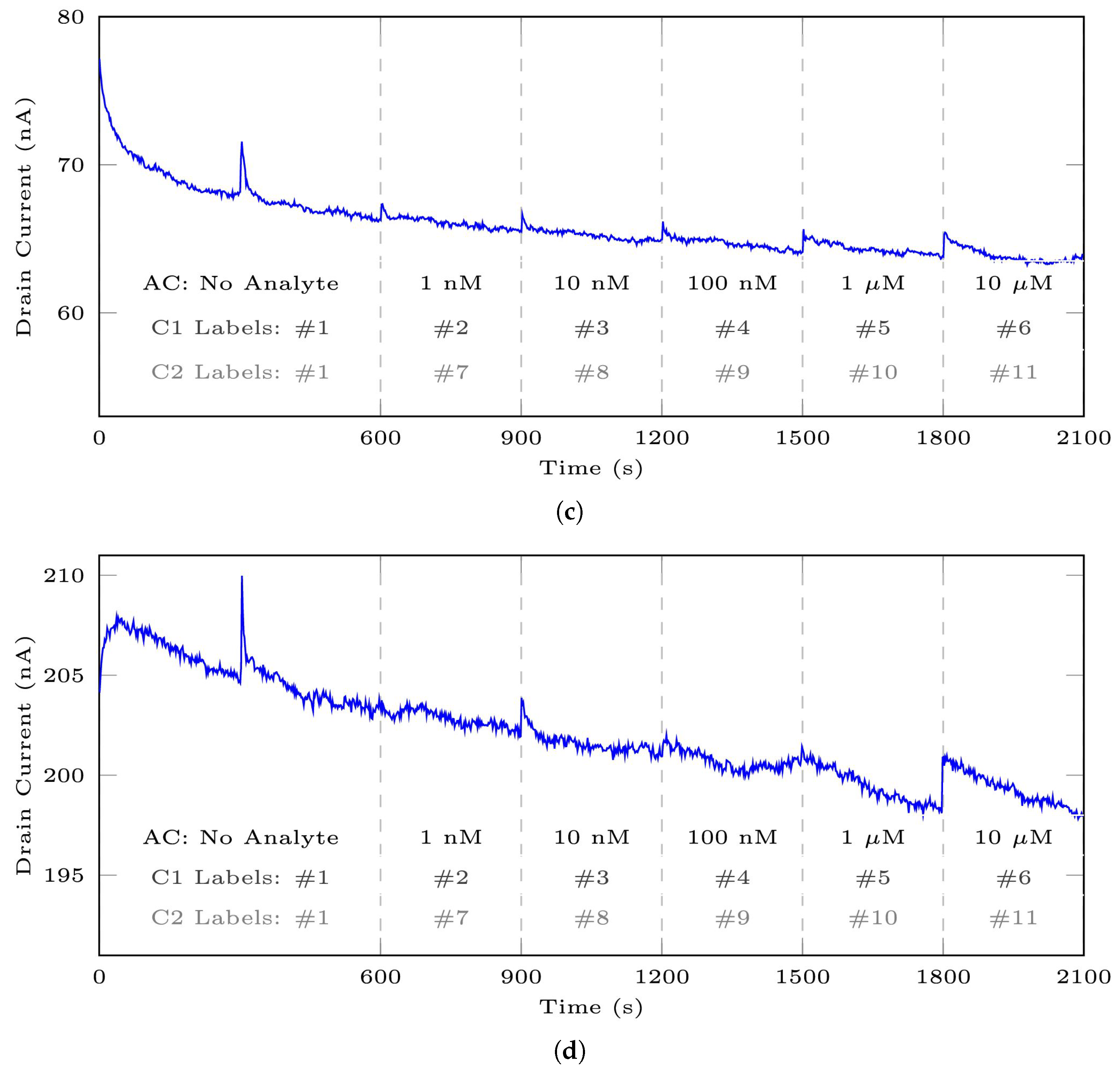
Figure 10.
The stereotypical sensing time series registered by aptasensors include (a) the typical signal from DS 1 with an initial AC starting from 1 nM, (b) another typical signal from the same dataset with AC starting from 1 μM, (c) a sample from DS 2, and (d) a sample from DS 3. Note that AC, C1 Labels, and C2 Labels refer to the analyte concentration and the segment labels for classification models 1 and 2 in this paper, respectively.
Figure 10.
The stereotypical sensing time series registered by aptasensors include (a) the typical signal from DS 1 with an initial AC starting from 1 nM, (b) another typical signal from the same dataset with AC starting from 1 μM, (c) a sample from DS 2, and (d) a sample from DS 3. Note that AC, C1 Labels, and C2 Labels refer to the analyte concentration and the segment labels for classification models 1 and 2 in this paper, respectively.
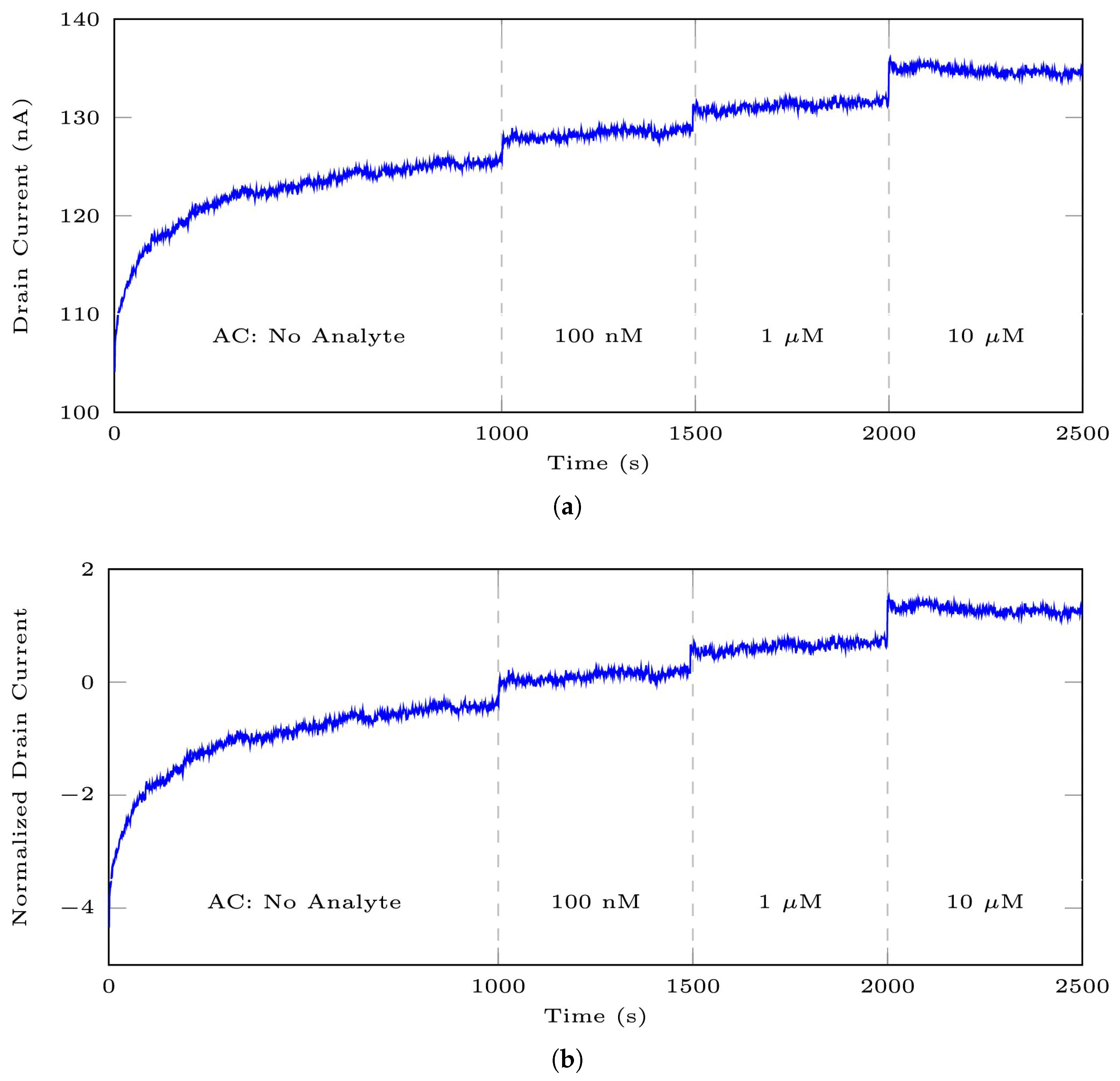
Figure 11.
An example of data normalization for the adenosine dataset: (a) the raw signal, (b) the normalized signal according to Z-score scaling.
Figure 11.
An example of data normalization for the adenosine dataset: (a) the raw signal, (b) the normalized signal according to Z-score scaling.
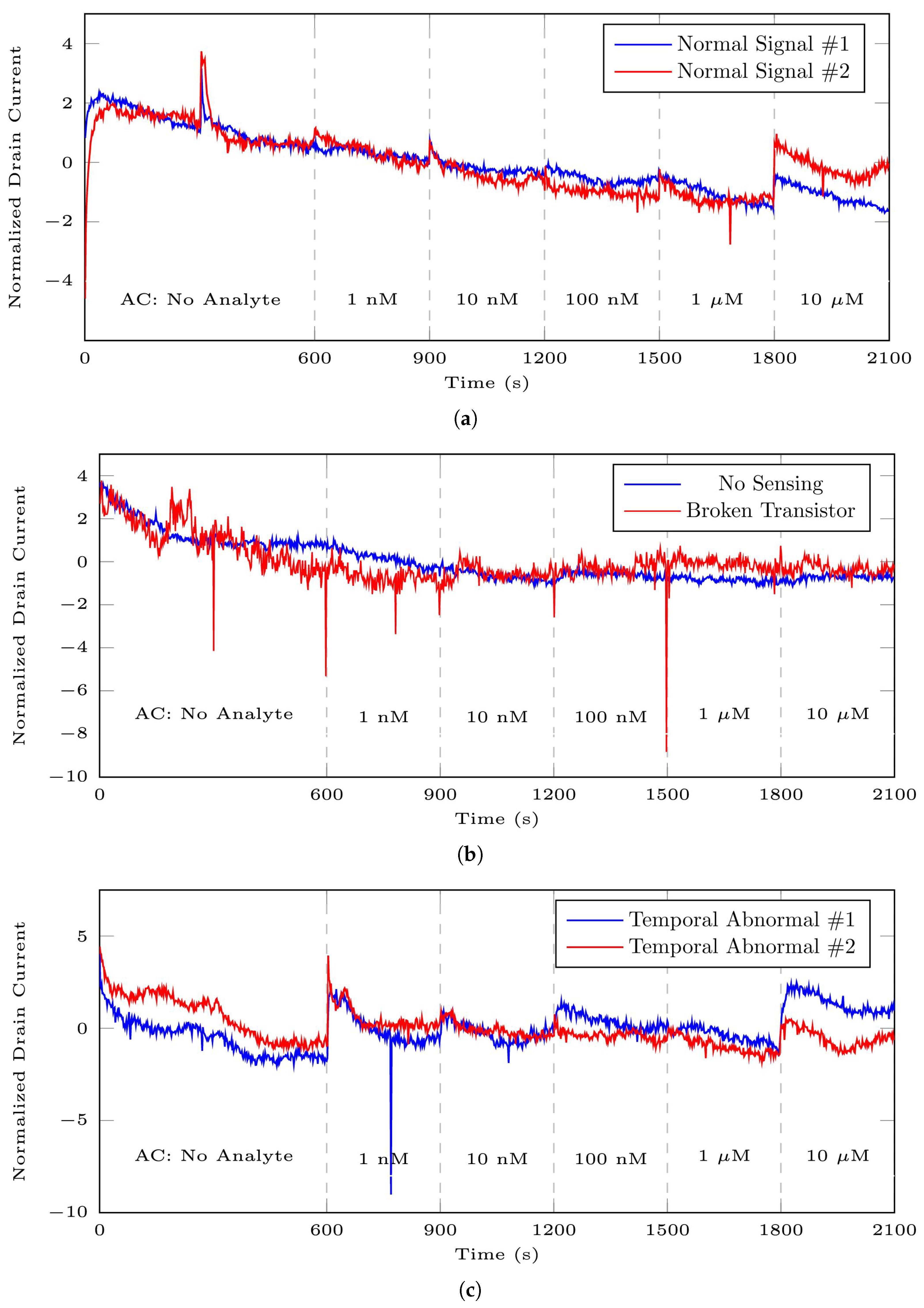
Figure 12.
These plots illustrate a comparison between normal 35-mer oestradiol signal patterns and the patterns of abnormal signals: (a) signals showing normal and standard behaviour, (b) abnormal time series (the blue and red lines represent signals from non-sensing and malfunctioning transistor sensors, respectively), (c) signals with abnormal time intervals, captured by functional sensors but exhibiting unusual patterns from 300 to 750 s.
Figure 12.
These plots illustrate a comparison between normal 35-mer oestradiol signal patterns and the patterns of abnormal signals: (a) signals showing normal and standard behaviour, (b) abnormal time series (the blue and red lines represent signals from non-sensing and malfunctioning transistor sensors, respectively), (c) signals with abnormal time intervals, captured by functional sensors but exhibiting unusual patterns from 300 to 750 s.
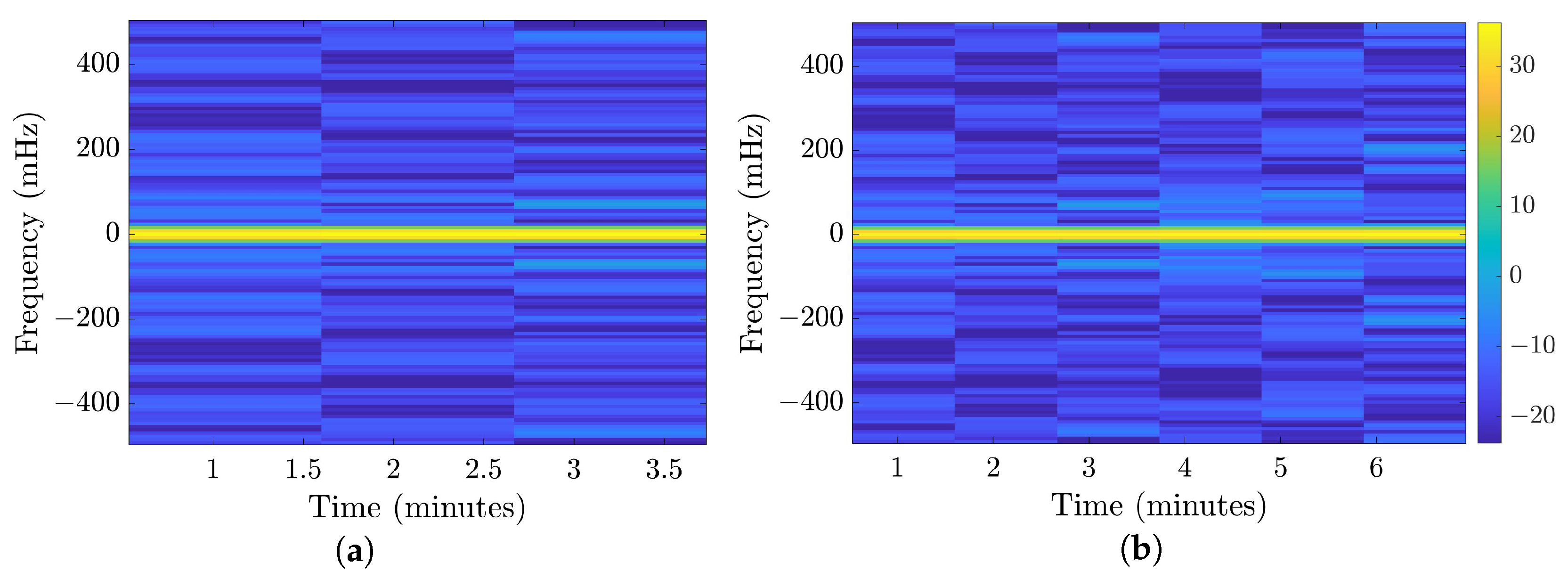
Figure 13.
Illustration of the spectrogram for a typical and normal 10 μM 35-mer adenosine segment: (a) STFT of the initial 300 s, and (b) STFT of the full 500 s.
Figure 13.
Illustration of the spectrogram for a typical and normal 10 μM 35-mer adenosine segment: (a) STFT of the initial 300 s, and (b) STFT of the full 500 s.
Figure 14.
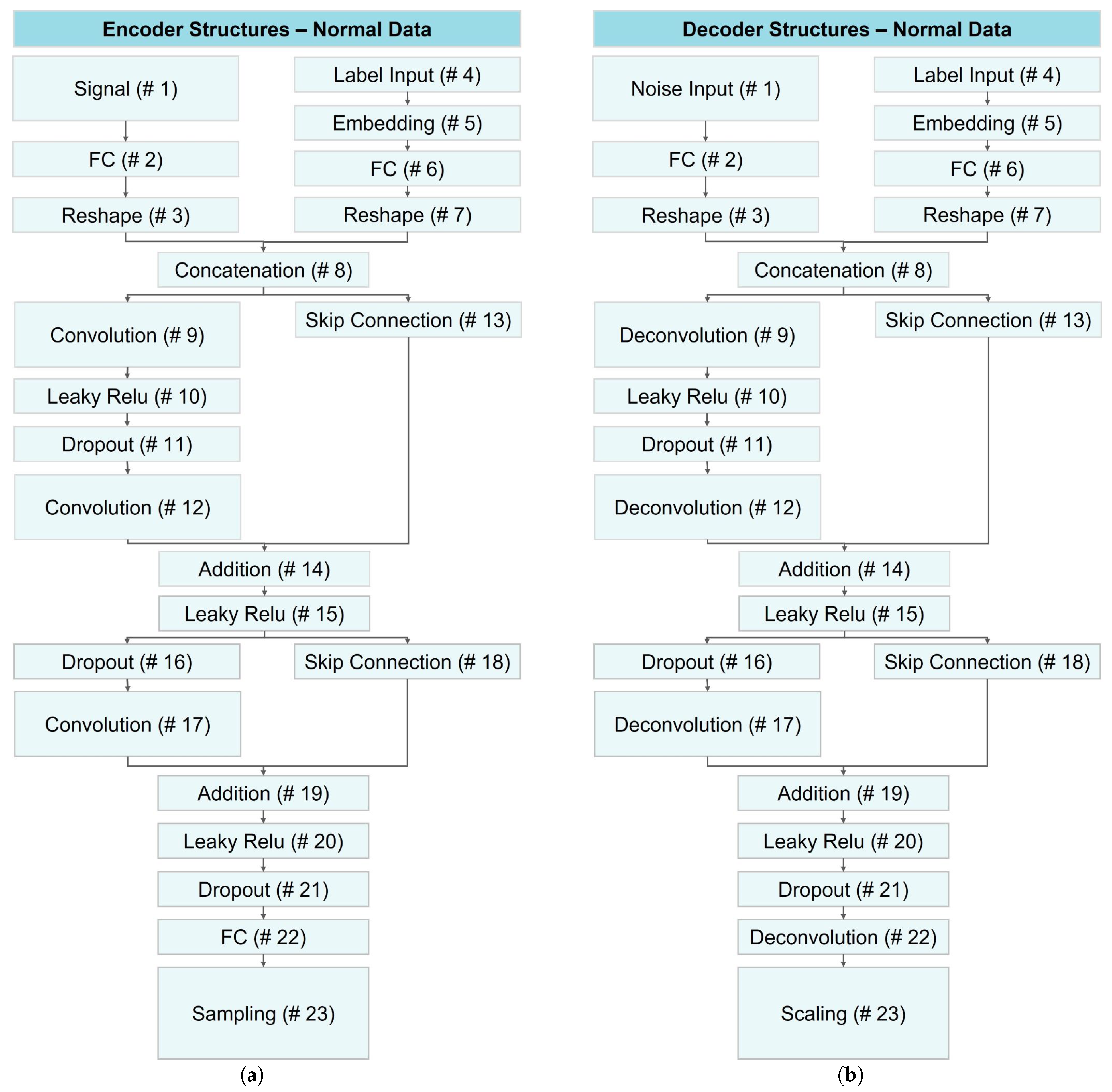
Structure of CVAE networks for data augmentation of normal data: (a) the encoder module and (b) the decoder network.
Figure 14.
Structure of CVAE networks for data augmentation of normal data: (a) the encoder module and (b) the decoder network.
Figure 15.
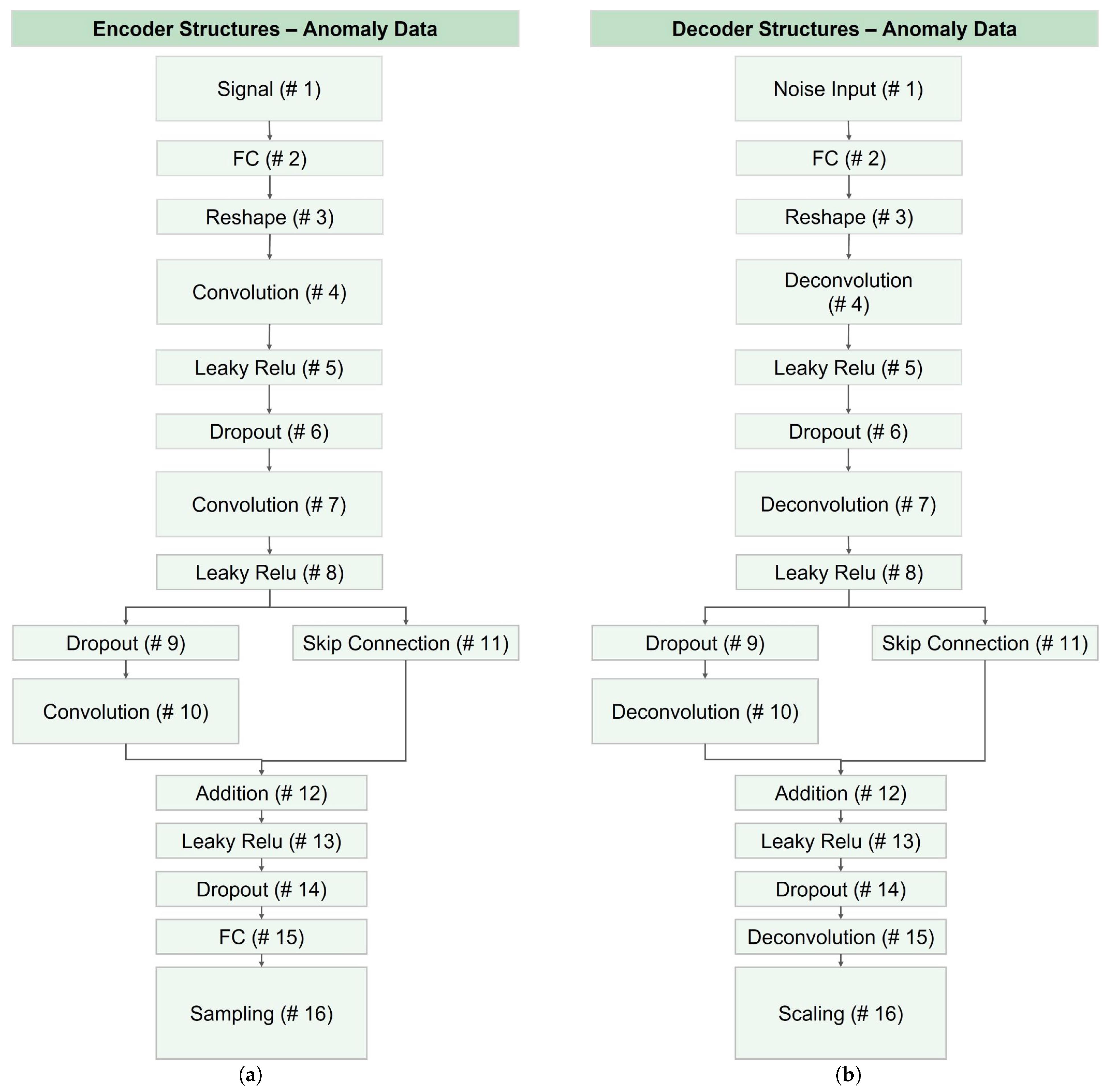
Structure of VAE networks for data augmentation of abnormal data: (a) the encoder network, and (b) the decoder module. Note that the anomaly data augmentation was essential for C2 models.
Figure 15.
Structure of VAE networks for data augmentation of abnormal data: (a) the encoder network, and (b) the decoder module. Note that the anomaly data augmentation was essential for C2 models.
Figure 16.
A schematic of the network architecture. The primary distinction among these networks lay in their recurrent layer, which incorporated either a GRU, unidirectional LSTM, or bidirectional LSTM layer.
Figure 16.
A schematic of the network architecture. The primary distinction among these networks lay in their recurrent layer, which incorporated either a GRU, unidirectional LSTM, or bidirectional LSTM layer.
Figure 17.
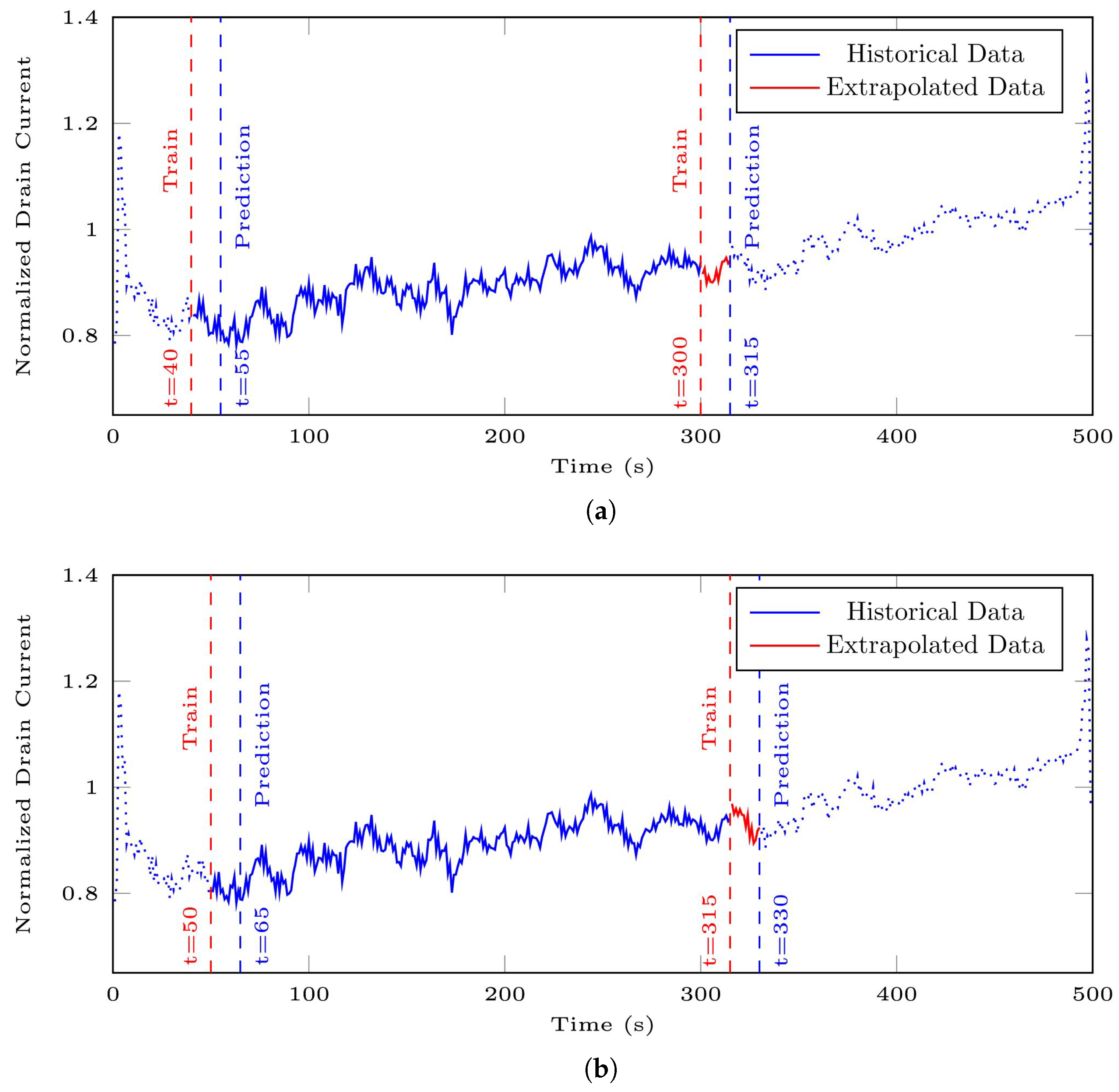
Illustration of two iterations of signal extrapolation procedure on a segment of the 35-mer adenosine dataset with AC of 10 μM: (a) first iteration, and (b) second iteration.
Figure 17.
Illustration of two iterations of signal extrapolation procedure on a segment of the 35-mer adenosine dataset with AC of 10 μM: (a) first iteration, and (b) second iteration.
Figure 18.
A schematic of the recurrent-based network architecture for classification models. The primary distinction among these networks lay in their second layer, which included either a GRU, ULSTM, or BLSTM layer.
Figure 18.
A schematic of the recurrent-based network architecture for classification models. The primary distinction among these networks lay in their second layer, which included either a GRU, ULSTM, or BLSTM layer.
Figure 19.
Illustration of ConvRNN networks architectures used for enhanced feature extraction in classification tasks.
Figure 19.
Illustration of ConvRNN networks architectures used for enhanced feature extraction in classification tasks.
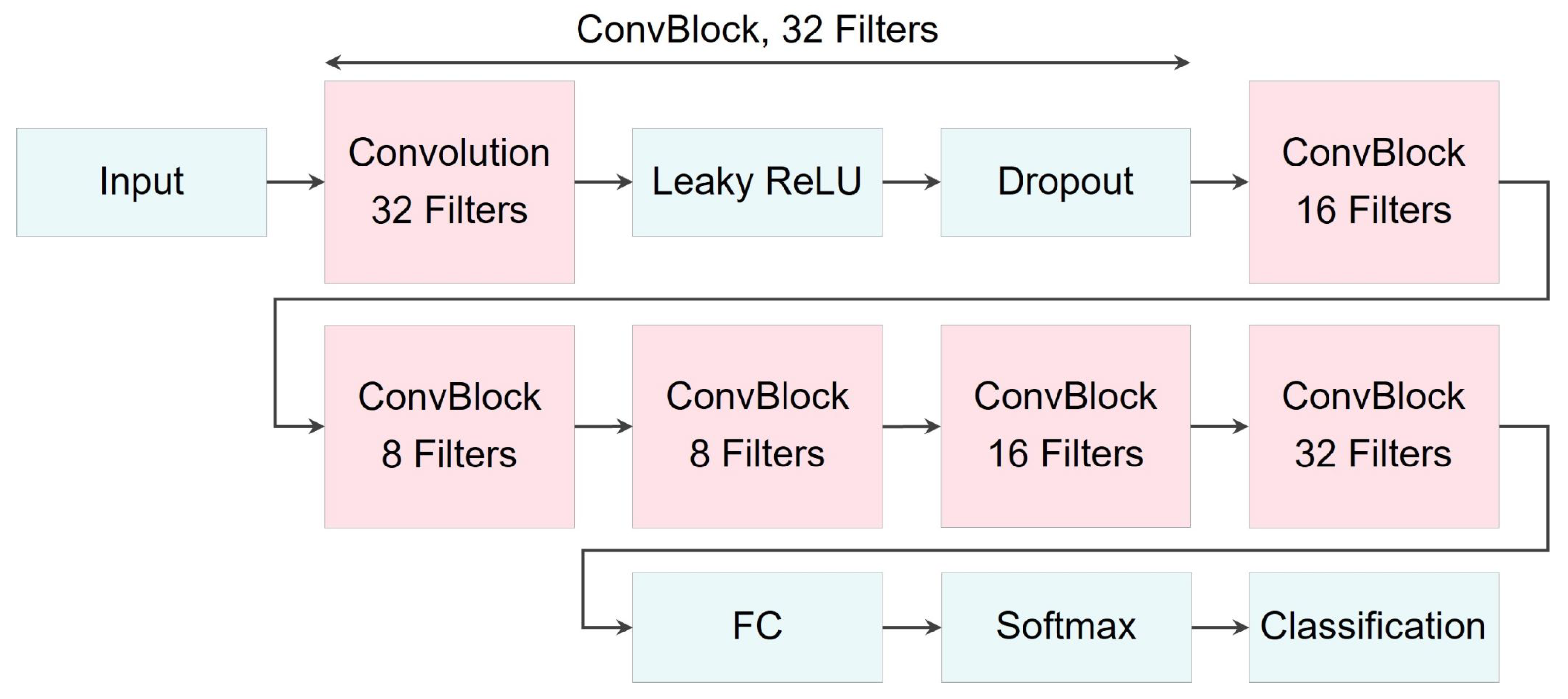
Figure 20.
Illustration of CNN network architecture used for classification models.
Figure 20.
Illustration of CNN network architecture used for classification models.
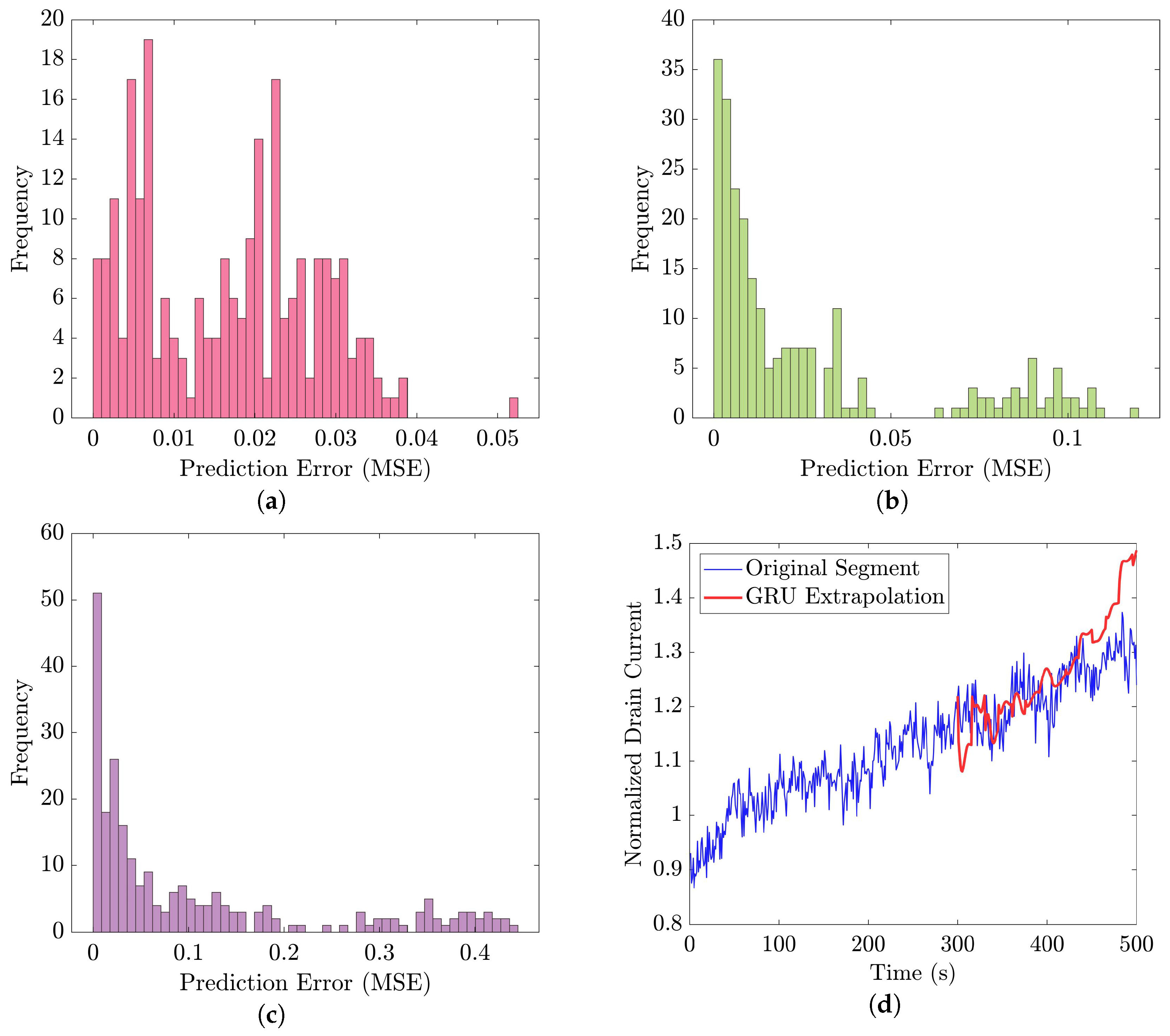
Figure 21.
Performance evaluation and an example of signal extrapolation on the 35-mer adenosine dataset: histograms of prediction error for (a) GRU, (b) ULSTM, and (c) BLSTM networks, along with (d) an example of forecasting future sensor outputs with three GRU-based prediction models at AC of 10 μM.
Figure 21.
Performance evaluation and an example of signal extrapolation on the 35-mer adenosine dataset: histograms of prediction error for (a) GRU, (b) ULSTM, and (c) BLSTM networks, along with (d) an example of forecasting future sensor outputs with three GRU-based prediction models at AC of 10 μM.
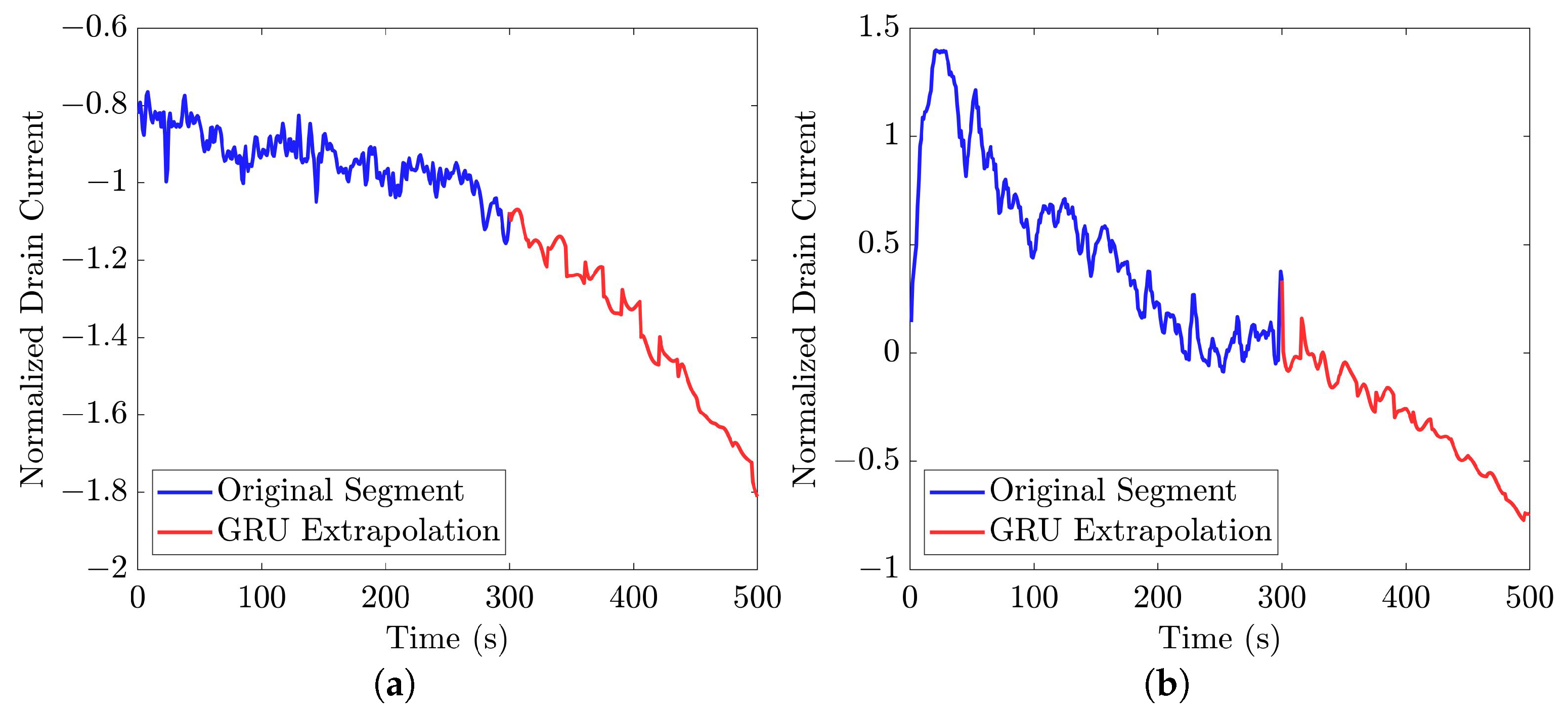
Figure 22.
Examples of signal extrapolation with GRU network on oestradiol datasets: (a) a 31-mer Oestradiol segment with AC of 1 μM, (b) a 35-mer Oestradiol segment with AC of 100 nM.
Figure 22.
Examples of signal extrapolation with GRU network on oestradiol datasets: (a) a 31-mer Oestradiol segment with AC of 1 μM, (b) a 35-mer Oestradiol segment with AC of 100 nM.
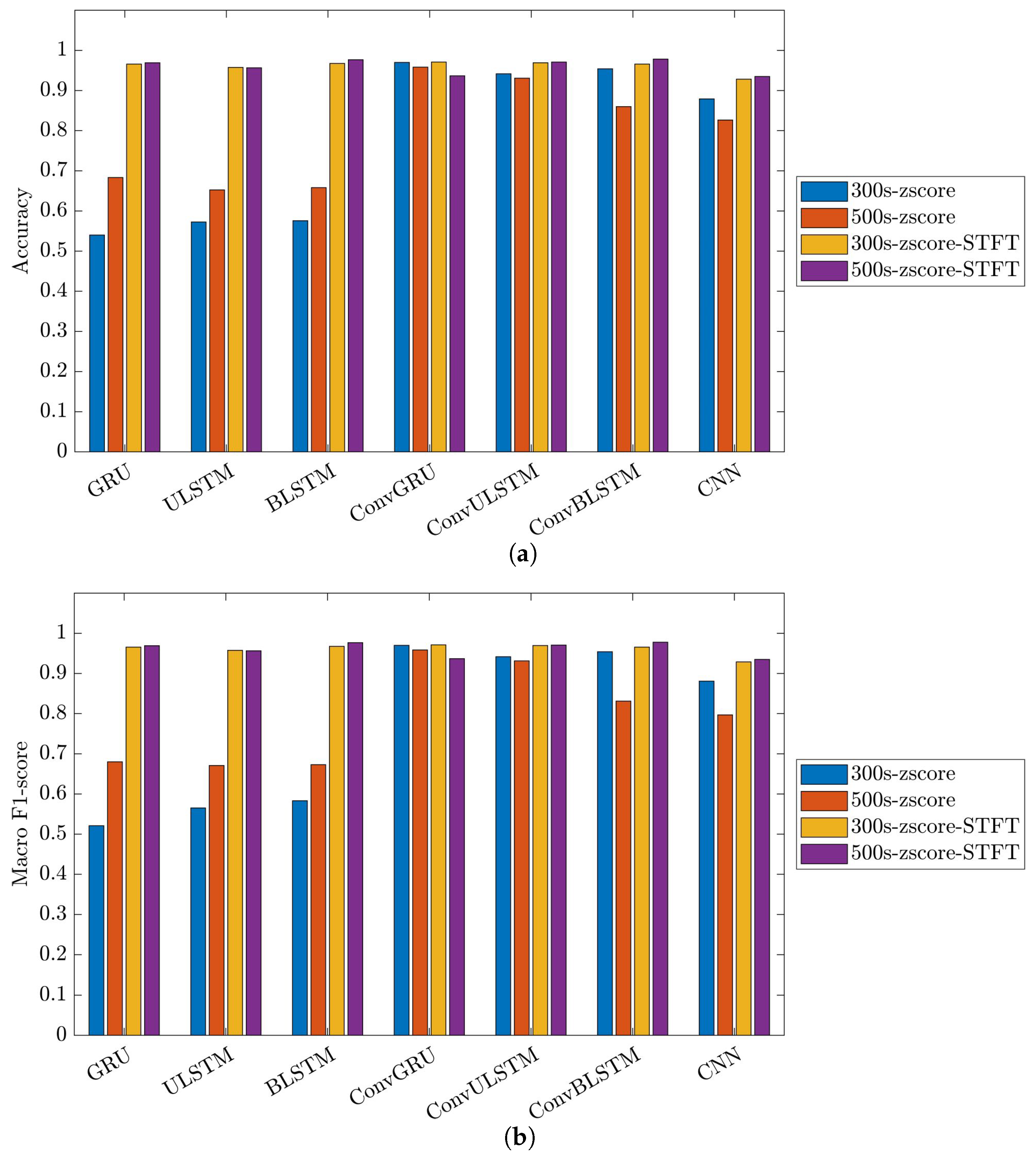
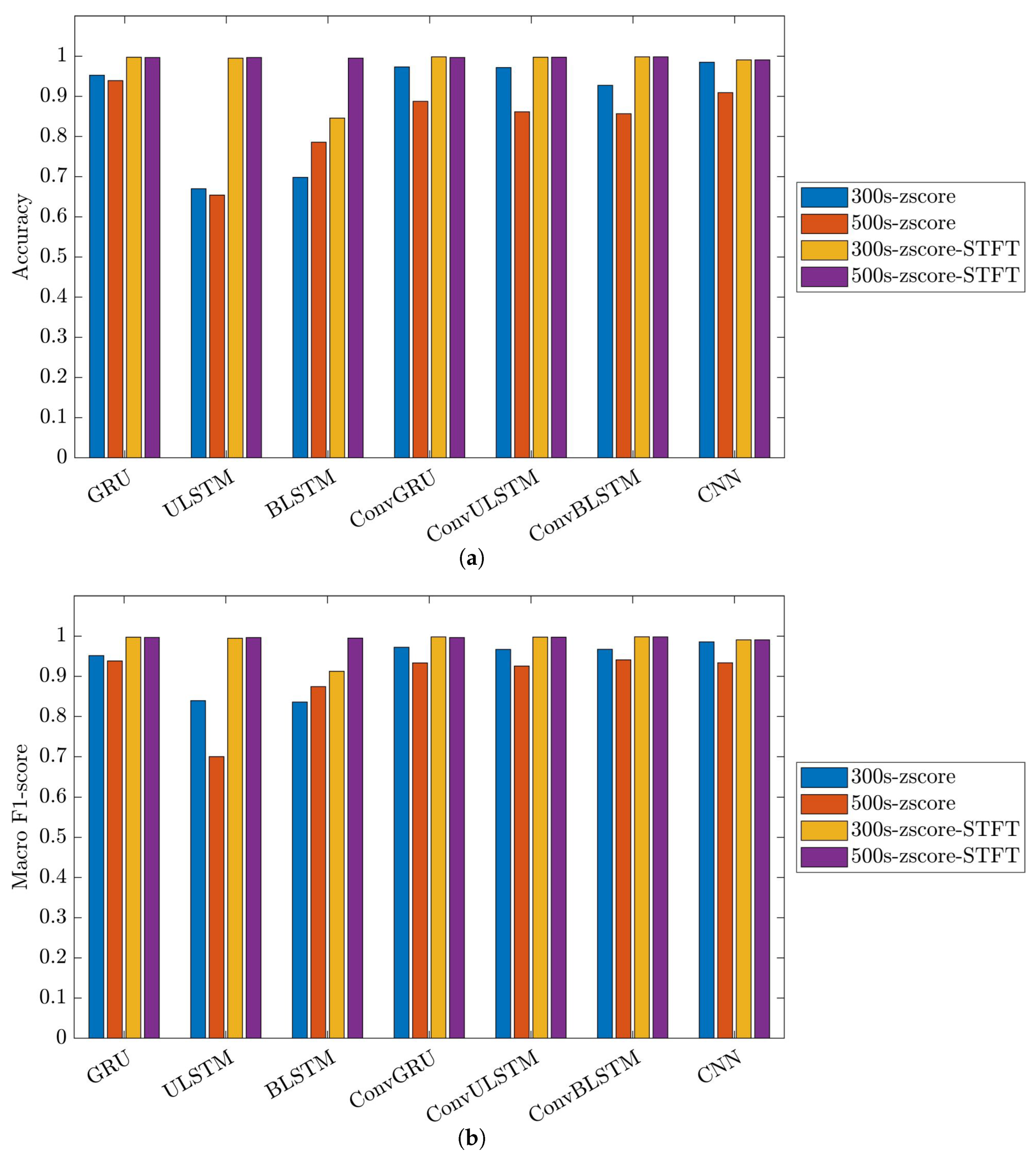
Figure 23.
Performance metrics of C1 model on 35-mer adenosine dataset: (a) accuracy and (b) macro F1-score.
Figure 23.
Performance metrics of C1 model on 35-mer adenosine dataset: (a) accuracy and (b) macro F1-score.
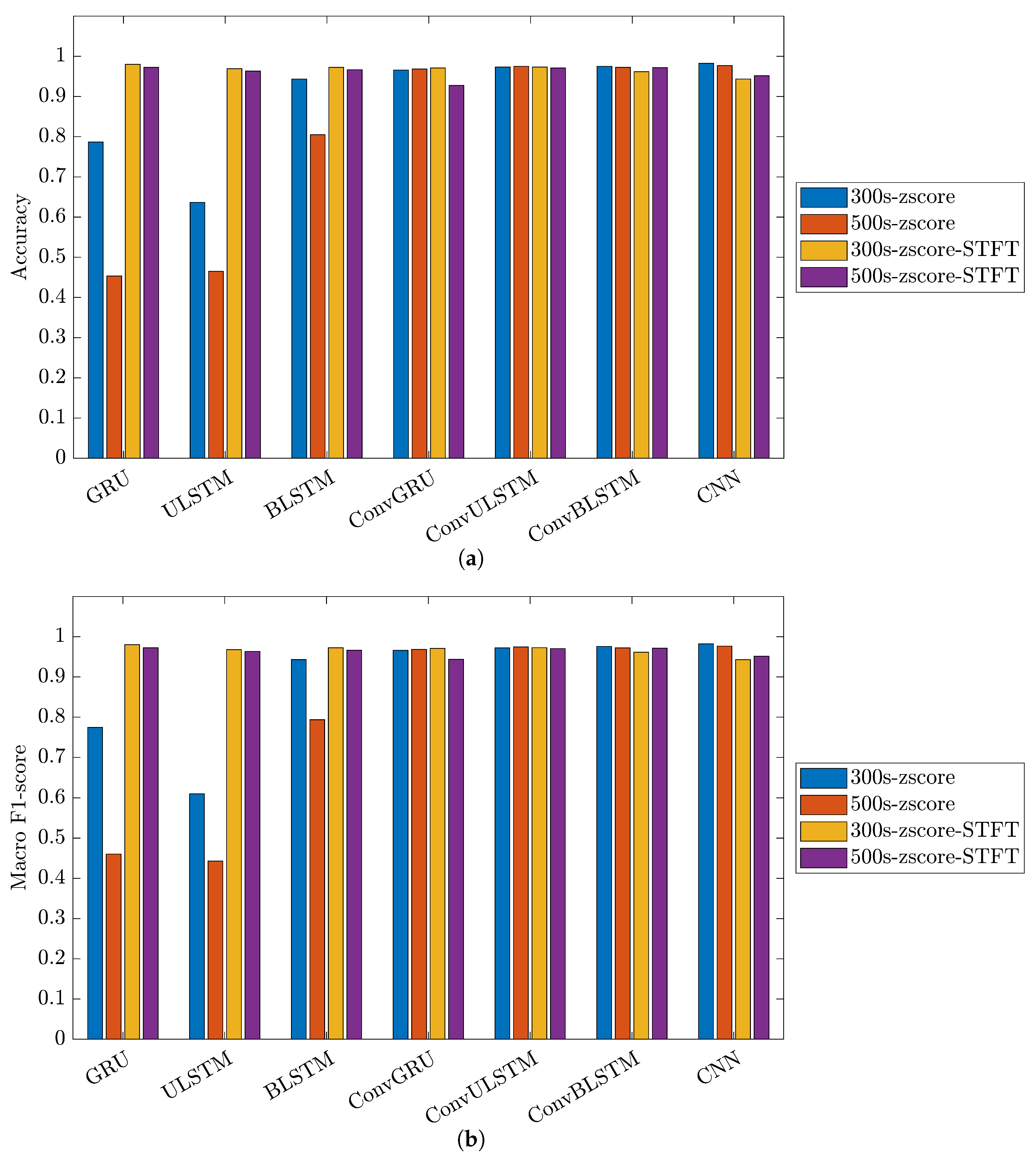
Figure 24.
Performance metrics of C1 model on 31-mer oestradiol dataset: (a) accuracy and (b) macro F1-score.
Figure 24.
Performance metrics of C1 model on 31-mer oestradiol dataset: (a) accuracy and (b) macro F1-score.
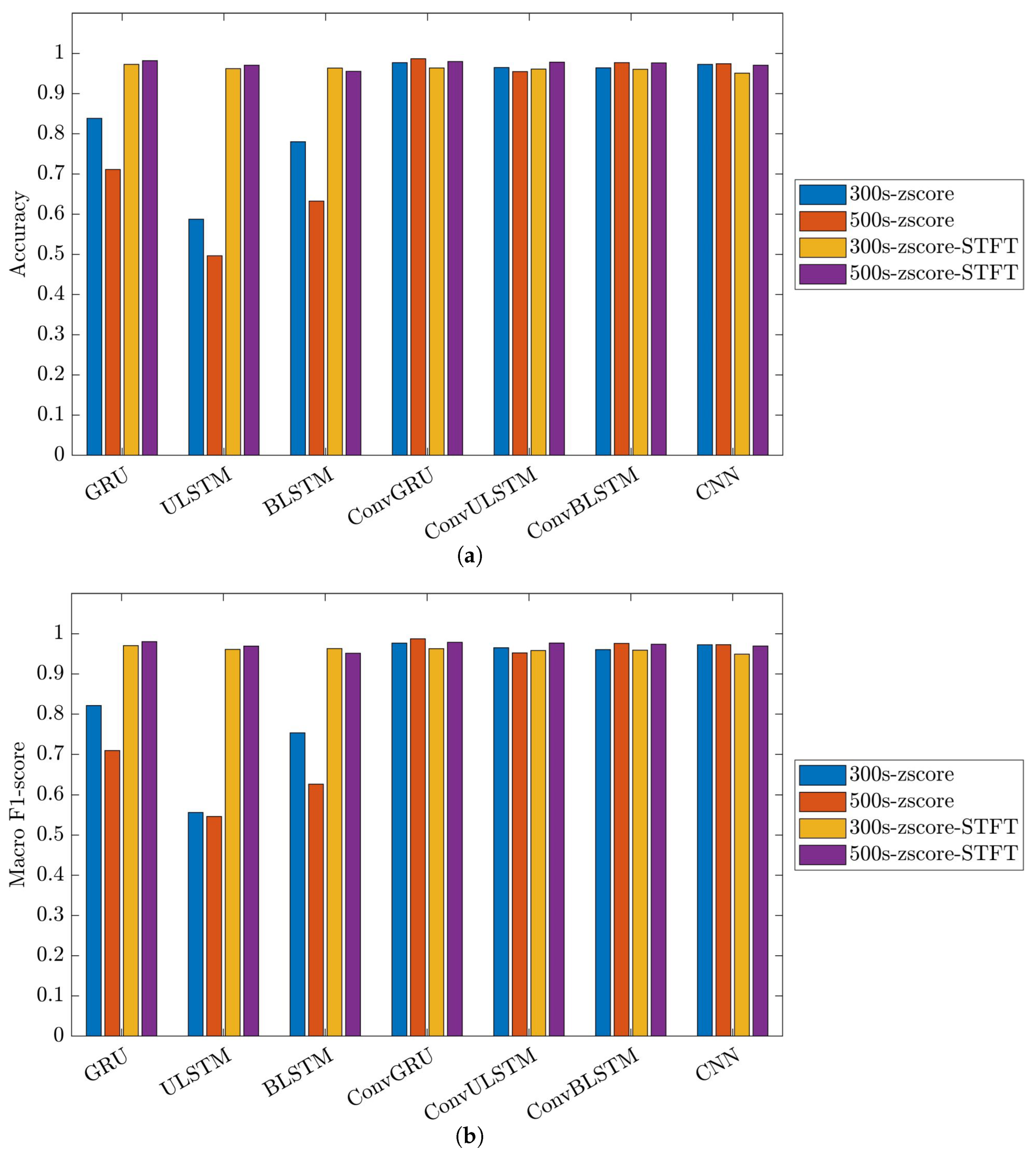
Figure 25.
Performance metrics of C1 model on 35-mer oestradiol dataset: (a) accuracy and (b) macro F1-score.
Figure 25.
Performance metrics of C1 model on 35-mer oestradiol dataset: (a) accuracy and (b) macro F1-score.
Figure 26.
Performance metrics of C2 model: (a) accuracy and (b) macro F1-score.
Figure 26.
Performance metrics of C2 model: (a) accuracy and (b) macro F1-score.
Table 1.
The total count of signals in the provided datasets.
Table 1.
The total count of signals in the provided datasets.
| Dataset ID | Dataset Name | Dataset Size |
|---|
| DS 1 | 35-mer Adenosine | 15 |
| DS 2 | 31-mer Oestradiol | 24 |
| DS 3 | 35-mer Oestradiol | 24 |
Table 2.
The datasets and the fundamental elements of the sensors responsible for recording signals in each dataset.
Table 2.
The datasets and the fundamental elements of the sensors responsible for recording signals in each dataset.
| Dataset Name | Analyte | Transducer | Bioreceptor | Ref. |
|---|
| 35-mer Adenosine | Adenosine | CNT FET | -NH2-AAAAAAAAAACCTGGGGGAGTATTGCGGAGGAAGG- | [29] |
| 31-mer Oestradiol | Oestradiol | CNT FET | -GGTCCTGACCGGAGGCTGACCGGAGTGGGAA- | [30] 1 |
| 35-mer Oestradiol | Oestradiol | CNT FET | -AAGGGATGCCGTTTGGGCCCAAGTTCGGCATAGTG- | [31] |
Table 3.
Comparison of the sensing procedures of the sensors. Note that the details regarding the oestradiol sensors are combined into a single column, as they share similar sensing procedures.
Table 3.
Comparison of the sensing procedures of the sensors. Note that the details regarding the oestradiol sensors are combined into a single column, as they share similar sensing procedures.
| Characteristics | Adenosine Sensor | Oestradil Sensors |
|---|
| Time interval measurement | 1 s | 1.081 s with std |
| Gate voltage () | 0 V | 0 V |
| Drain voltage () | 100 mV | 100 mV |
| Buffer solution | 2 mM Tris-HCI | PBS with 5% EtOH |
| Initial step load chemical | 110 μM of 2 mM Tris-HCI | 100 μL of PBS 5% EtOH |
| Next steps load chemical | - | 20 μL of PBS 5% EtOH |
| Initial analyte load time | 1000 s | 600 s |
| Time interval of analyte injection | 500 s | 300 s |
| Time interval of chemical injection | - | 300 s |
| Variation of analyte concentration | 100 pM–10 μM | 1 nM–10 μM |
Table 4.
The total number of segments corresponds to the datasets and is categorized based on their analyte concentration levels. It should be noted that the 100 pM segment in DS 1 was removed due to data scarcity and will not be mentioned in this study afterwards.
Table 4.
The total number of segments corresponds to the datasets and is categorized based on their analyte concentration levels. It should be noted that the 100 pM segment in DS 1 was removed due to data scarcity and will not be mentioned in this study afterwards.
| Analyte Concentration | DS 1 | DS 2 | DS 3 |
|---|
| No Analyte | 15 | 24 | 24 |
| 100 pM | 1 | 0 | 0 |
| 1 nM | 5 | 24 | 24 |
| 10 nM | 7 | 24 | 24 |
| 100 nM | 9 | 24 | 24 |
| 1 μM | 12 | 24 | 24 |
| 10 μM | 15 | 24 | 24 |
| Total Segments | 63 | 144 | 144 |
Table 5.
The total size of normal segments for available datasets after applying anomaly detection.
Table 5.
The total size of normal segments for available datasets after applying anomaly detection.
| Analyte Concentration | DS 1 | DS 2 | DS 3 |
|---|
| No Analyte | 9 | 18 | 5 |
| 1 nM | 4 | 18 | 5 |
| 10 nM | 4 | 18 | 11 |
| 100 nM | 4 | 18 | 11 |
| 1 μM | 4 | 18 | 11 |
| 10 μM | 6 | 18 | 11 |
Table 6.
Segment labeling for classification models C1 and C2.
Table 6.
Segment labeling for classification models C1 and C2.
| Analyte Concentration | C1 Labels | C2 Labels |
|---|
| DS 1 | DS 2 | DS 3 | DS 1 | DS 2 | DS 3 |
|---|
| No Analyte | 1 | 1 | 1 | 1 | 1 | 1 |
| 1 nM | 2 | 2 | 2 | 2 | 7 | 7 |
| 10 nM | 3 | 3 | 3 | 3 | 8 | 8 |
| 100 nM | 4 | 4 | 4 | 4 | 9 | 9 |
| 1 μM | 5 | 5 | 5 | 5 | 10 | 10 |
| 10 μM | 6 | 6 | 6 | 6 | 11 | 11 |
| Anomaly | - | - | - | 12 | 12 | 12 |
Table 7.
Layer description of the recurrent-based networks developed for signal extrapolation.
Table 7.
Layer description of the recurrent-based networks developed for signal extrapolation.
| Layer Number | Layer Type | Hyperparameters | Learnable Parameters | State Parameters |
|---|
| 1 | Sequential input | Output size: 1 | - | - |
| 2 | GRU | Input size: 1 | : | Hidden state: n × 1 |
| Hidden units: n | : |
| Output size: n | b: |
| ULSTM | Input size: 1 | : | Hidden state: |
| Hidden units: n | : | |
| Output size: n | b: | Cell state: |
| BLSTM | Input size: 1 | : | Hidden state: |
| Hidden units: n | : | |
| Output size: | b: | Cell state: |
| 3 | FC (GRU, ULSTM) 1 | Input size: n | Weights: | - |
| Output size: 1 | Bias: |
| FC (BLSTM) 2 | Input size: | Weights: | - |
| Output size: 1 | Bias: |
| 4 | Regression output | Output size: 1 | - | - |
Table 8.
Layer description and comparison of the developed recurrent-based networks for classification models.
Table 8.
Layer description and comparison of the developed recurrent-based networks for classification models.
| Layer Number | Layer Type | Hyperparameters (Output Size) | Learnable Parameters | State Parameters |
|---|
| 1 | Sequential input | 1 | - | - |
| 2 | GRU | Input size: 1 | : | |
| Hidden units: n | : | Hidden state: |
| Output size: n | b: | |
| ULSTM | Input size: 1 | : | Hidden state: |
| Hidden units: n | : | |
| Output size: n | b: | Cell state: |
| BLSTM | Input size: 1 | : | Hidden state: |
| Hidden units: n | : | |
| Output size: | b: | Cell state: |
| 3 | FC (GRU, ULSTM) | m | Weights: | - |
| Bias: |
| FC (BLSTM) | m | Weights: | - |
| Bias: |
| 4, 5 | Softmax, Classification | m | - | - |
Table 9.
Architecture and layer descriptions of the proposed Conv-GRU, Conv-ULSTM, and Conv-BLSTM networks for classification models.
Table 9.
Architecture and layer descriptions of the proposed Conv-GRU, Conv-ULSTM, and Conv-BLSTM networks for classification models.
| Layer Number | Layer Type | Hyperparameters (Output Size) | Learnable Parameters | State Parameters |
|---|
| 1 | Image Input | | - | - |
| 2 | 2D Convolution | | Weights: | - |
| Bias: |
| 3 | Leaky ReLU, scale = 0.1 | | - | - |
| 4 | Flatten | | - | - |
| 5 | GRU | Input size: k | : | |
| Hidden units: n | : | Hidden state: |
| Output size: n | b: | |
| ULSTM | Input size: k | : | Hidden state: |
| Hidden units: n | : | |
| Output size: n | b: | Cell state: |
| BLSTM | Input size: k | : | Hidden state: |
| Hidden units: n | : | |
| Output size: | b: | Cell state: |
| 6 | Leaky ReLU, scale = 0.1 | GRU, ULSTM: n | - | - |
| BLSTM: |
| 7 | FC (GRU, ULSTM) | m | Weights: | - |
| Bias: |
| FC (BLSTM) | m | Weights: | - |
| Bias: |
| 8, 9 | Softmax, Classification | m | - | - |
Table 10.
Architecture and layer descriptions of the proposed CNN network for classification models. Note that ConvBlock refers to a combination of a 2D convolution layer, a Leaky ReLU activation function, and a dropout layer placed sequentially.
Table 10.
Architecture and layer descriptions of the proposed CNN network for classification models. Note that ConvBlock refers to a combination of a 2D convolution layer, a Leaky ReLU activation function, and a dropout layer placed sequentially.
| Layer Number | Layer Type | Hyperparameters (Output Size) | Learnable Parameters |
|---|
| 1 | Image Input | | - |
| 2 | 2D Convolution | | Weights: |
| Bias: |
| 3 | Leaky ReLU, scale = 0.1 | | - |
| 4 | Dropout, probability = 0.25 | | - |
| 5, 6, 7 | 2D ConvBlock | | Weights: |
| Bias: |
| 8, 9, 10 | 2D ConvBlock | | Weights: |
| Bias: |
| 11, 12, 13 | 2D ConvBlock | | Weights: |
| Bias: |
| 14, 15, 16 | 2D ConvBlock | | Weights: |
| Bias: |
| 17, 18, 19 | 2D ConvBlock | | Weights: |
| Bias: |
| 20 | FC | Input size: | Weights: |
| Output size: m | Bias: |
| 21, 22 | Softmax, Classification | m | - |
Table 11.
Detailed information regarding the output sizes of the layers in the networks developed for data augmentation. Additionally, “S”, “C”, and “B” denote the spatial size, channel number, and batch size, respectively. Furthermore, CVAE and VAE represent the networks used for data augmentation of normal and anomaly data, respectively.
Table 11.
Detailed information regarding the output sizes of the layers in the networks developed for data augmentation. Additionally, “S”, “C”, and “B” denote the spatial size, channel number, and batch size, respectively. Furthermore, CVAE and VAE represent the networks used for data augmentation of normal and anomaly data, respectively.
| Layers | Layers Name | Encoder | Decoder |
|---|
| CVAE | VAE | Encoder/Decoder | DS 1 | DS 2 & DS 3 | DS 1 | DS 2 & DS 3 |
| 1 | 1 | Image/Feature Input | 500 (S) × 1 (S) × 1 (C) × 1 (B) | 300 (S) × 1 (S) × 1 (C) × 1 (B) | 32 (C) × 1 (B) | 32 (C) × 1 (B) |
| 2 | 2 | FC | 500 (C) × 1 (B) | 300 (C) × 1 (B) | 4096 (C) × 1 (B) | 2048 (C) × 1 (B) |
| 3 | 3 | Reshape | 500 (S) × 1 (S) × 1 (C) × 1 (B) | 300 (S) × 1 (S) × 1 (C) × 1 (B) | 64 (S) × 1 (S) × 64 (C) × 1 (B) | 32 (S) × 1 (S) × 64 (C) × 1 (B) |
| 4 | - | Feature Input | 1 (C) × 1 (B) | 1 (C) × 1 (B) | 1 (C) × 1 (B) | 1 (C) × 1 (B) |
| 5 | - | Embedding | 32 (C) × 1 (B) | 32 (C) × 1 (B) | 32 (C) × 1 (B) | 32 (C) × 1 (B) |
| 6 | - | FC | 500 (C) × 1 (B) | 300 (C) × 1 (B) | 64 (C) × 1 (B) | 32 (C) × 1 (B) |
| 7 | - | Reshape | 500 (S) × 1 (S) × 1 (C) × 1 (B) | 300 (S) × 1 (S) × 2 (C) × 1 (B) | 64 (S) × 1 (S) × 1 (C) × 1 (B) | 32 (S) × 1 (S) × 1 (C) × 1 (B) |
| 8 | - | Concatenation | 500 (S) × 1 (S) × 2 (C) × 1 (B) | 300 (S) × 1 (S) × 2 (C) × 1 (B) | 64 (S) × 1 (S) × 65 (C) × 1 (B) | 32 (S) × 1 (S) × 65 (C) × 1 (B) |
| 9 | 4 | Conv/Deconv | 250 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) |
| 10 | 5 | Leaky ReLU, scale = 0.1 | 250 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) |
| 11 | 6 | Dropout, probability = 0.25 | 250 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) |
| 12 | 7 | Conv/Deconv | 125 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) | 125 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) |
| 13 | - | Conv/Deconv | 125 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) |
| 14 | - | Addition | 125 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) |
| 15 | 8 | Leaky ReLU, scale = 0.1 | 125 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) |
| 16 | 9 | Dropout, probability = 0.25 | 125 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 75 (S) × 1 (S) × 16 (C) × 1 (B) |
| 17 | 10 | Conv/Deconv | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) | 249 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) |
| 18 | 11 | Conv/Deconv | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) | 249 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) |
| 19 | 12 | Addition | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) | 249 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) |
| 20 | 13 | Leaky ReLU, scale = 0.1 | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) | 249 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) |
| 21 | 14 | Dropout, probability = 0.25 | 63 (S) × 1 (S) × 16 (C) × 1 (B) | 38 (S) × 1 (S) × 16 (C) × 1 (B) | 249 (S) × 1 (S) × 16 (C) × 1 (B) | 150 (S) × 1 (S) × 16 (C) × 1 (B) |
| 22 | 15 | FC/Deconv | 64 (C) × 1 (B) | 64 (C) × 1 (B) | 500 (S) × 1 (S) × 1 (C) × 1 (B) | 300 (S) × 1 (S) × 1 (C) × 1 (B) |
| | | | Z: 32 (C) × 1 (B) | 32 (C) × 1 (B) | | |
| 23 | 16 | Sampling | : 32 (C) × 1 (B) | 32 (C) × 1 (B) | 500 (S) × 1 (S) × 1 (C) × 1 (B) | 300 (S) × 1 (S) × 1 (C) × 1 (B) |
| | | | : 32 (C) × 1 (B) | 32 (C) × 1 (B) | | |
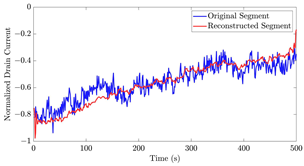
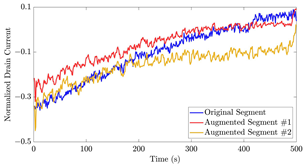
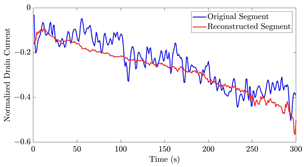
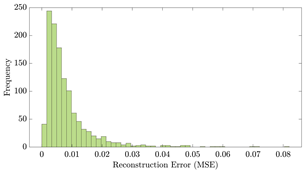
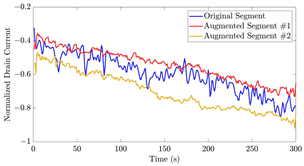
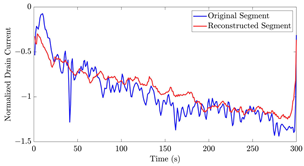
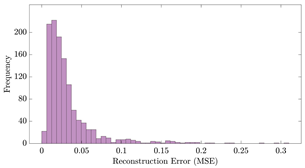
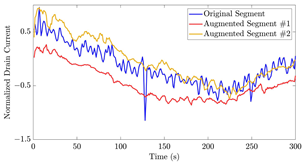
Table 12.
The performance metrics of the proposed data augmentation method and examples of data generated by the decoder modules of the CVAEs are presented. Columns 2 and 4 show examples of reconstructed and augmented segments, respectively, corresponding to their respective datasets. The segments for reconstruction were randomly selected from the test data and augmented data. AC refers to the analyte concentration of the segments.



 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}