1. Introduction
Upper limb amputees face challenges with activities of daily living and require prosthetic hands to restore their grasping ability. Prosthetic hands can not only improve the physical and psychological quality of life of amputees but also prevent upper limb muscle atrophy and relieve neuralgia [
1]. Existing commercial prosthetics often have issues such as high failure rates, limited flexibility, and deficiencies in user–machine interaction. To address these issues, surface electromyography (sEMG) gesture recognition has been implemented into prosthetic hands, which has become one of the most promising technologies for smart prosthetics [
2]. The sEMG gesture recognition is a non-intrusive technique that can accurately decode intended hand movements by measuring and analyzing electrical activities generated by muscular contractions and relaxations near the skin’s surface [
3], thus enabling the wearer to autonomously control myoelectric prosthetics [
4]. However, to achieve a natural and stable autonomous control of myoelectric prosthetic hands to perform various fine hand movements such as grasping, pinching, and fingering, appropriate signal processing methods and the resulting fast, accurate, and reliable gesture recognition are crucial.
Traditional signal preprocessing techniques of bandpass filtering, root mean square (RMS) feature extraction, and frequency domain feature extraction have been extensively employed in processing sEMG signals, among which bandpass filters are widely used to remove noise and interference from sEMG signals, thereby improving signal quality [
5]. Meanwhile, RMS feature extraction aims to obtain amplitude information from sEMG signals, and then the obtained amplitude information is used as features for gesture classification [
6] or as a fixed threshold for identifying the initiation and cessation of dynamic activities. Frequency domain feature extraction methods transform the signals into the frequency domain to extract spectral information. These traditional signal processing techniques possess attributes such as low complexity and quick processing time, rendering them advantageous for real-time control, but they exhibit limitations in terms of data processing and generalization capabilities, often necessitating the manual adjustment of model parameters to accommodate new samples. Worse still, these traditional techniques may introduce signal distortion, unintentionally omit vital feature information during the noise reduction process, or fail to adequately capture the precise dynamic changes and temporal relationships inherent in the signals, so they are suitable for distinct gesture classification with small-scale sEMG data [
7].
Deep learning techniques have recently garnered significant attention for their ability to automatically extract hierarchical and abstract features from raw data [
8]. Notably, convolutional neural networks (CNNs), recurrent neural networks (RNNs), and their variants have been successfully applied to gesture recognition using sEMG signals. These deep learning models excel in capturing complex temporal and spatial dependencies, resulting in more accurate, fine, and robust gesture classification [
9]. Based on a large-scale sample set including 30 gestures from 12 able-bodied subjects, Shi et al. proposed a CNN architecture and proved its potential in sEMG pattern recognition after multiple training and optimization [
10]. Sun et al. [
11] employed a long short-term memory (LSTM) model to identify the motor intention of neurobots based on high-density sEMG data, and the model achieved a peak accuracy of 83.33%. Likewise, the dataset was also large-scale, consisting of recordings from 19 participants encompassing 65 different gesture classes, and a significant amount of time was devoted to training. Chen et al. [
12] proposed an effective transfer learning strategy using a CNN-LSTM model for sEMG-based gesture recognition. They selected a dataset consisting of 30 hand gestures involving various states of finger joints, elbow joints, and wrist joints. After about 800 epochs of training and with all networks converged, over 90% recognition accuracy was achieved on the training dataset. Although fine gesture recognition with high accuracy was achieved, the network structures of the above models were complex and required large-scale datasets with many computational resources in the training phase, thus requiring a long training and computational time. Additionally, these models may face challenges in accuracy degradation during practical testing, possibly due to weak generalization ability or interference from real-world environments.
In the past five years, attention mechanisms have been increasingly integrated into deep learning architectures to enhance the discriminative power and robustness of gesture recognition models by selectively attending to informative regions or channels of sEMG signals [
13]. Hu et al. [
14] proposed a gesture recognition model called “MIC-Attention-LSTM”, which used correlation numbers to reduce time-domain features, used the maximal information coefficient (MIC) to select the best feature set, and utilized LSTM and Attention-LSTM to create the final model. The MIC-Attention-LSTM model achieved a higher classification accuracy of 87.27% compared to the LSTM model with the same architecture, highlighting the effectiveness of the attention mechanism algorithm in enhancing LSTM classification accuracy. Similarly, Lv et al. [
15] proposed a remote hand gesture recognition system based on a multi-attention deep learning framework with multi-view, which utilized a sparse complex-valued neural network to automatically process channel selectively and obtain the final output by summing the rescaled transformation output and original data. The proposed framework was validated on the myo dataset, myoUp dataset, and ninapro DB5, achieving improved accuracy rates of 0.46%, 18.88%, and 7% compared to previous works, respectively. Because attention mechanisms focus more on the relationships of local features, they are limited in capturing cross-channel interactions and often show limited adaptability to different gesture recognition tasks and datasets. Therefore, additional hyperparameter tuning and model structure design are often required to make these attention mechanisms better adapted to specific application scenarios. However, this process can be time-consuming and computationally intensive, which increases the complexity of the models and may have the opposite effect on improving the real-time performance of the recognition system.
To solve the aforementioned challenges, this study proposes a unique and low-complexity model for gesture recognition termed CNN-ECA, which combines a CNN with an enhanced channel attention (ECA) mechanism to improve its discriminative power. To progressively expand the receptive field size, the model incorporates stacked convolutional layers with varying kernel sizes. On this basis, the addition of the ECA mechanism can extract the dependency relationships between the sEMG data of different channels via cross-channel interactions, and adaptively obtain the feature channel weights via attention weighting, effectively focusing on relevant features and improving the model’s robustness in capturing essential information from gesture sEMG signals. In addition, to make the signal input into the model more concentrated and stable in both the time domain and frequency domain, a preprocessing strategy for extracting envelope signals using the fast Hilbert transform (FHT) is developed. The combination of these techniques yields a powerful and efficient model for gesture recognition, allowing for the real-time control of prosthetic hands and potentially beneficial applications involving accurate and dependable sEMG signals.
2. Materials and Methods
This section presents the methodology employed in this study for gesture recognition based on sEMG signals. It encompasses the description of the dataset, data preprocessing, overlapped sliding window segmentation, CNN-ECA architecture, and the design of the prosthetic hand system.
2.1. Dataset Description
2.1.1. sEMG Acquisition Hardware
The dataset used in this study plays a vital role in training, evaluating, and validating sEMG-based gesture recognition systems. To ensure optimal signal handling, it is essential to select reliable equipment to collect sEMG signals. gForcePro+ armband from OYMotion Technologies (Shanghai, China) with an 8-channel high-sensitivity myoelectric sensor was employed in this work, and each myoelectric sensor consists of three differential dry electrodes and an electronic component. The myoelectric sensor collects sEMG signals through the electrode’s contact with the skin, and the internal electronic component performs amplification, filtering, sampling, and digitization. Since sEMG signals in the frequency range of 20–550 Hz contain the most relevant information for motion recognition [
16], the sampling frequency of the gForcePro+ armband was set as 1000 Hz to allow us to preserve the information to the greatest extent and ensure that the dataset is suitable for our study’s objectives.
2.1.2. Hand Gestures
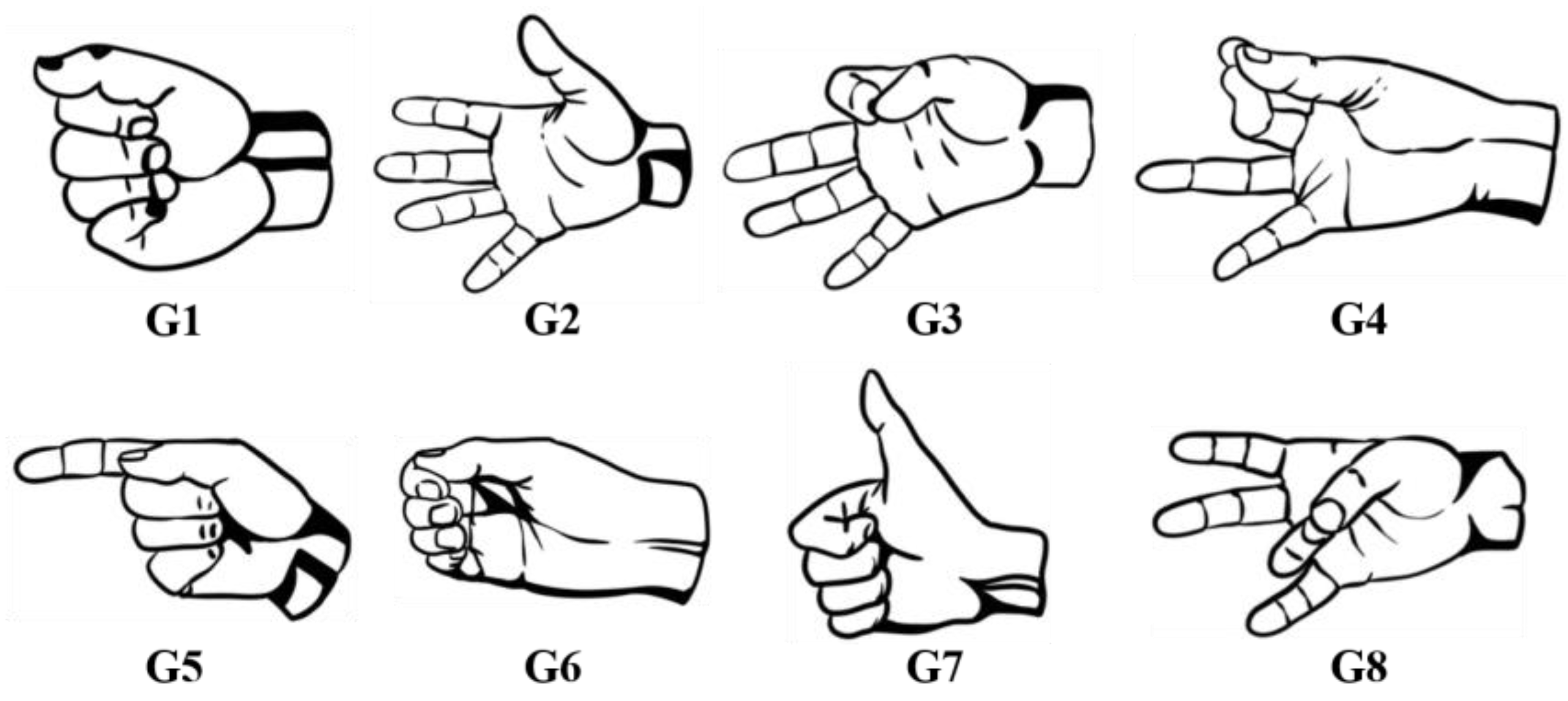
Eight gestures (G1~G8) that are commonly used in daily life and can be performed by prosthetic hands are involved in the experiment. As shown in
Figure 1, these gestures cover a wide range of functions and are described below:
G1: Fist—This gesture involves making a fist, which is used to grab or hold an object.
G2: Open—In this gesture, the hand opens up, allowing the release of the held object.
G3: Two-Finger Pinch—The index finger and thumb come together to pinch, which is used to hold small or flat objects.
G4: Three-Finger Pinch—In this gesture, the thumb pinches the index finger and the middle finger, used for holding round objects.
G5: Pointing—The index finger is extended to point towards a certain direction or target.
G6: Hook—The four fingers are bent, resembling a hook, and used to pick up objects like bags.
G7: Thumbs Up—This gesture involves giving a thumbs-up, expressing approval, encouraging, or signaling positivity.
G8: Ring Finger Grasp—In this gesture, the thumb is brought towards the ring finger, used for grabbing small objects or rotating bottle caps, among other things.
Figure 1.
Hand gesture examples.
Figure 1.
Hand gesture examples.
2.1.3. Acquisition Protocol
We recruited 10 participants, 7 males and 3 females, with ages of 30 ± 5 years old. The experiment protocol was reviewed and approved by the ethics committee of Fujian Provincial Hospital (approval number: K2022-09-015). None of the participants have suffered from upper extremity muscle pain or orthopedic diseases in the past year, and they were all informed about the content and purpose of the experiment. Before the experiment, the participants sat on the side of an experimental table and kept their right forearm resting on the table. Then, the myoelectric armband was worn on the middle of the forearm, ensuring that the internal metal electrode was in close contact with the skin. All participants were asked to practice each gesture until they were able to perform the task as required by the experiment. During data collection, they were asked to complete each gesture by imitating a video of gesture instructions displayed on a computer screen (
Figure 2). To capture natural variations in muscle activation patterns, the acquisition time for each gesture was set to one minute, during which each gesture was repeated approximately 15–20 times. To avoid muscle fatigue, the participants were given a five-minute rest after completing each gesture.
2.2. Data Preprocessing
Previous studies on gesture recognition demonstrated that extracting the envelope of the raw sEMG signals could provide valuable insights into muscle activity [
17]. The envelope of the sEMG signals is a smoothed curve obtained by processing the raw signals, which simplifies data representation, reduces noise, expresses motion actions, and plays a crucial role in the classification of sEMG signals. Several methods are commonly used for envelope extraction, such as moving average, envelope detection, Hilbert transform, and wavelet transforms [
18]. In this study, considering the performance requirements of real-time control and fine control for the use of prosthetic hands, the FHT is employed to extract the envelope of the sEMG signals.
The FHT is an efficient signal processing technique used for extracting analytic envelopes from time-domain signals [
19]. During its computational process, the input time-domain signal is initially transformed through a Fourier transform to be mapped to the signal into the frequency domain. The FHT then performs phase adjustments according to the properties of the frequency domain signal, resulting in the imaginary part of the transformed signal corresponding to the original signal’s envelope, while the real part corresponds to the signal’s instantaneous phase. The key advantage of the FHT lies in its computational efficiency, which enables rapid and effective envelope extraction, thereby providing robust support for the control and recognition of sEMG signals. The extracted envelope signal is illustrated in
Figure 3.
2.3. Overlapped Sliding Window Segmentation
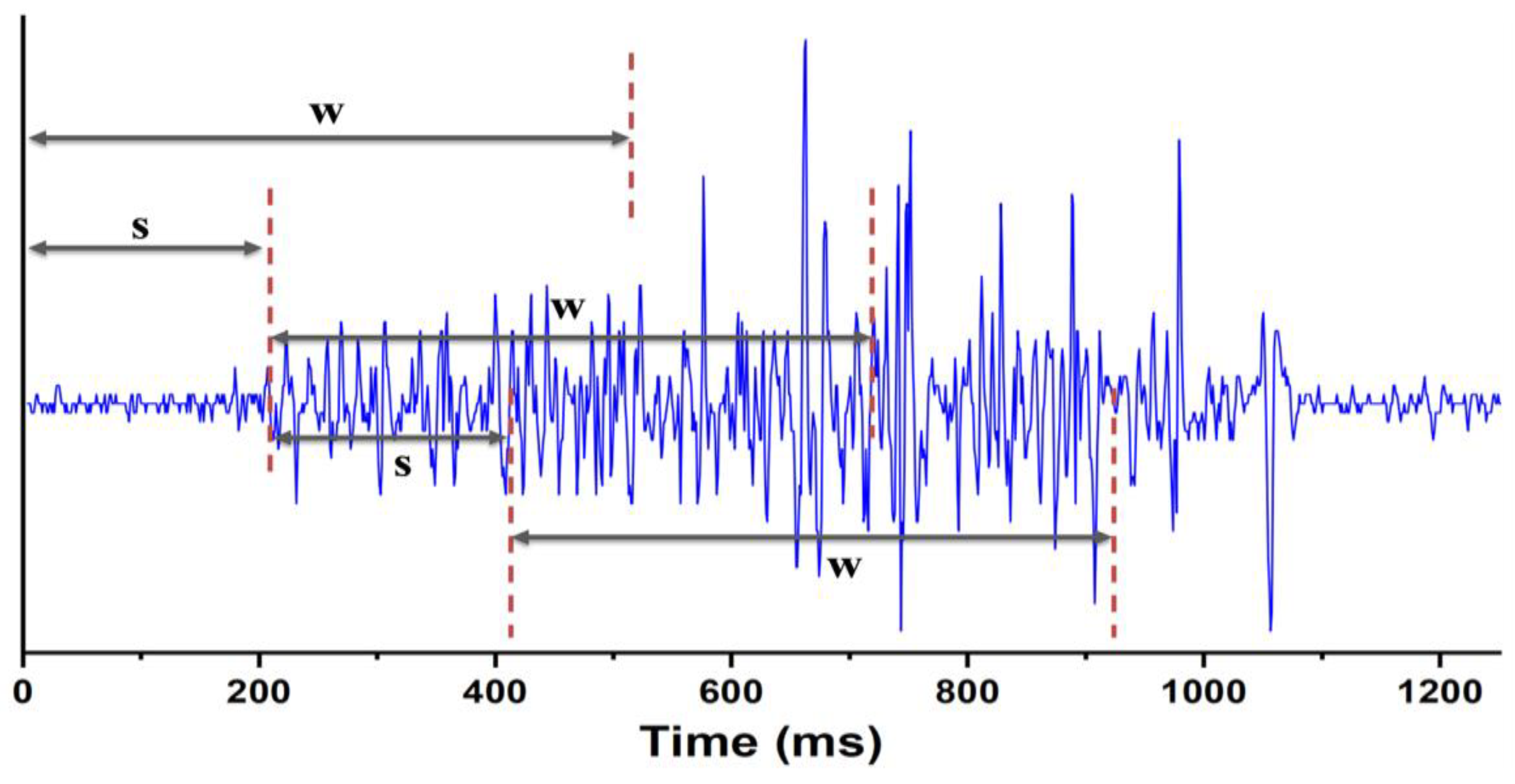
We employed an overlapped sliding window technique to segment the previously extracted envelope dataset of muscle sEMG signals. This approach allows us to control the overlap between data windows by adjusting the window size and step size, and decomposing the signals into muscle activity segments for feature extraction [
20]. The window size (w) determines each window’s duration. The step size (s) defines the time interval between windows, controlling their sliding speed. A smaller step size leads to increased overlap and provides more data for training and evaluation. In this approach, adjacent windows partially overlap, as shown in
Figure 4. This sliding window-based segmentation effectively addresses the temporal characteristics of muscle sEMG signals, enhancing the gesture recognition system’s accuracy and robustness [
21]. Using this technique, we extract relevant temporal information from sEMG signals, improving the system’s ability to identify and recognize different gestures.
We initially collected datasets from 10 participants, with each gesture lasting for one minute. Considering the duration of the gestures, real-time system requirements, and efficient data utilization, we set the window size to 300 ms with a step size of 100 ms. This segmentation approach allowed us to effectively extract and analyze relevant information from the dataset. Once the data was segmented, we divided it into training, validation, and test sets. Specifically, we allocated 80% of the dataset for the training set, 10% for the validation set, and the remaining 10% for the test set. This distribution allows us to evaluate the model’s performance on different datasets, ensuring a comprehensive assessment of its capabilities.
2.4. CNN-ECA Architecture
Deep learning algorithms offer several advantages for sEMG signal classification and recognition, including fast training and inference speed, suitability for real-time applications, high flexibility, and the ability to automatically extract features without manual intervention [
22]. Although sEMG signals are relatively stable during rest, they exhibit rapid changes to reflect muscle activity when gestures are performed. Once the gesture is completed, the changes in the sEMG signals cease, and the signals remain relatively stable, no longer representing a temporal sequence of changes [
23]. In the context of classifying and recognizing sEMG signals, it becomes crucial to focus on the signal variations during the gesture rather than the continuous state. As such, the classification model should emphasize capturing the dynamic features of gesture changes rather than modeling long-term sequences. An RNN like LSTM is commonly used for processing long-term temporal dependencies but might not be well suited for short-duration sEMG signals. On the other hand, CNNs excel at automatically learning local features in the temporal sequence, demonstrate faster training speeds than LSTM, and are particularly suitable for handling sEMG signals collected from multiple muscle channels.
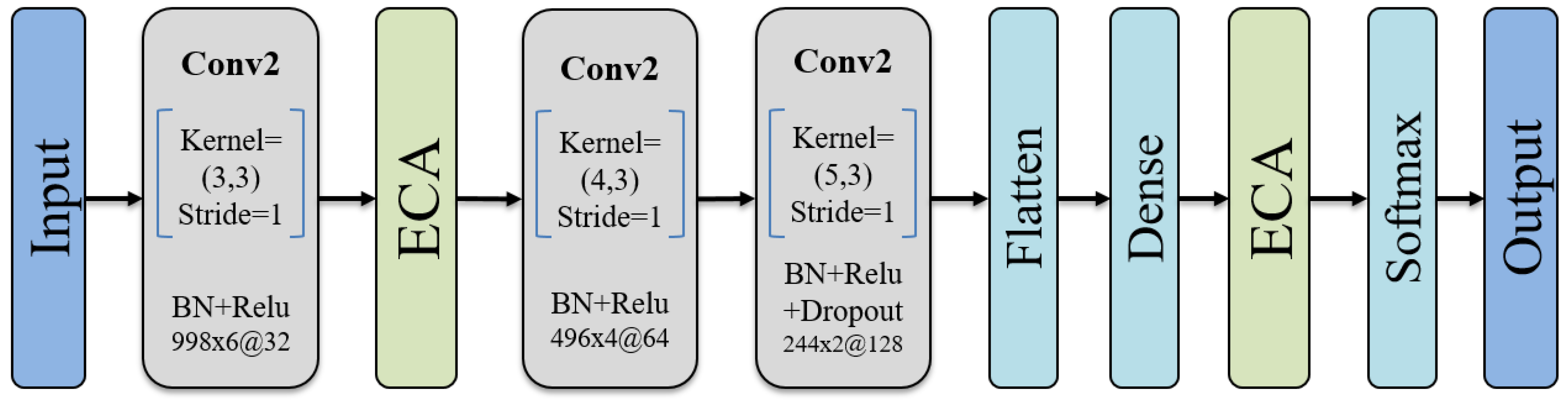
The architecture of the proposed attention-fused CNN model primarily consists of convolutional layers and attention mechanism layers (
Figure 5). Specifically, each convolutional layer is followed by a batch of normalization (BN) layer and rectified linear unit (ReLU) activation function to speed up convergence and address the problem of gradient explosion. To handle channel data from different muscle positions, the sizes of the convolutional kernels in the first, second, and third layers are set to (3, 3), (4, 3), and (5, 3), respectively. By sliding these kernels along the temporal and channel dimensions, the network can capture dynamic patterns in the temporal sequence and correlations among different channels simultaneously. Furthermore, the design of stacking kernels of different sizes enables the convolutional layers to gradually increase their receptive field, which is beneficial for capturing more comprehensive features. It is worth noting that the ECA mechanism layer is integrated after the first convolutional layer. This layer can enhance the focus and capture ability of important features through an adaptive weight allocation mechanism, contributing to improved model performance and generalization. At this stage, the model has already attained a wealth of feature expression capabilities; however, there may still be instances of redundant or less relevant features. To introduce a more nuanced emphasis and adjustment within the model’s decision-making layer, another ECA mechanism layer is integrated after the final fully connected layer. The incorporation of the ECA mechanism at this juncture directs the model’s focus towards features that significantly impact the current gesture classification task during decision making, thereby enhancing the model’s ability to distinguish complex EMG signals. Besides, to prevent overfitting, we incorporated dropout layers. Finally, a softmax layer with nodes equal to the number of gesture categories was added to convert the model’s output into a probability distribution for each class, enabling the effective classification of the gestures.
Furthermore, the inclusion of BN layers and dropout layers obviates the necessity to reduce the learning rate, as they can improve the model’s stability and generalization capability, facilitating smoother convergence. To optimize the model’s training process, the ADAM optimizer is adopted, which is a gradient-based optimization algorithm that efficiently updates the model’s parameters to minimize the loss function. For the loss function, we opted for categorical cross-entropy, a widely used metric for multi-class classification problems. This metric quantifies the disparity between the model’s predictions and the actual labels, and can guide the optimization of the model’s parameters [
24].
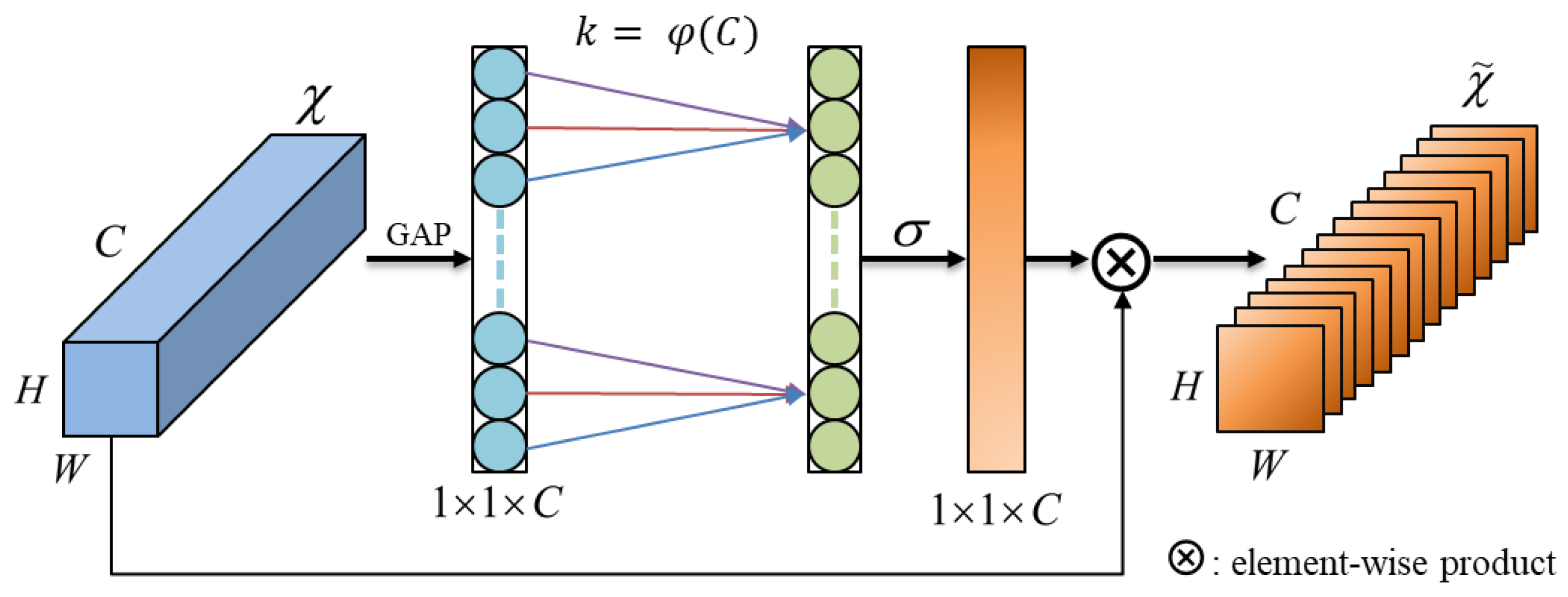
The attention mechanism is a machine learning technique that assigns different weights to input features in a neural network. The ECA mechanism utilized in this study is a form of channel attention mechanism, representing an enhanced version of the Squeeze-and-Excitation Networks (SE-Net) [
25]. By adaptively weighting the channel dimension of input features, the model can better capture important information in sEMG gesture signals. Its structure is depicted in
Figure 6, where the fully connected layer in the original SE-Net is replaced by one-dimensional convolutional kernels, making the model more lightweight. The size of the one-dimensional convolutional kernel is automatically determined based on the number of channels, eliminating the need for manual adjustments. The formula is as follows:
where K represents the kernel size, C represents the number of channels, and
denotes the nearest odd number to
x. By adapting the kernel size according to the number of channels, we can fully integrate interactions among specific channels. This technique substantially reduces the model’s complexity while preserving its performance. Moreover, it effectively mitigates the impact of dimensionality reduction on channel attention learning, resulting in notable improvements in the model’s processing speed and accuracy.
2.5. Real-Time Prosthetic Hand Control System
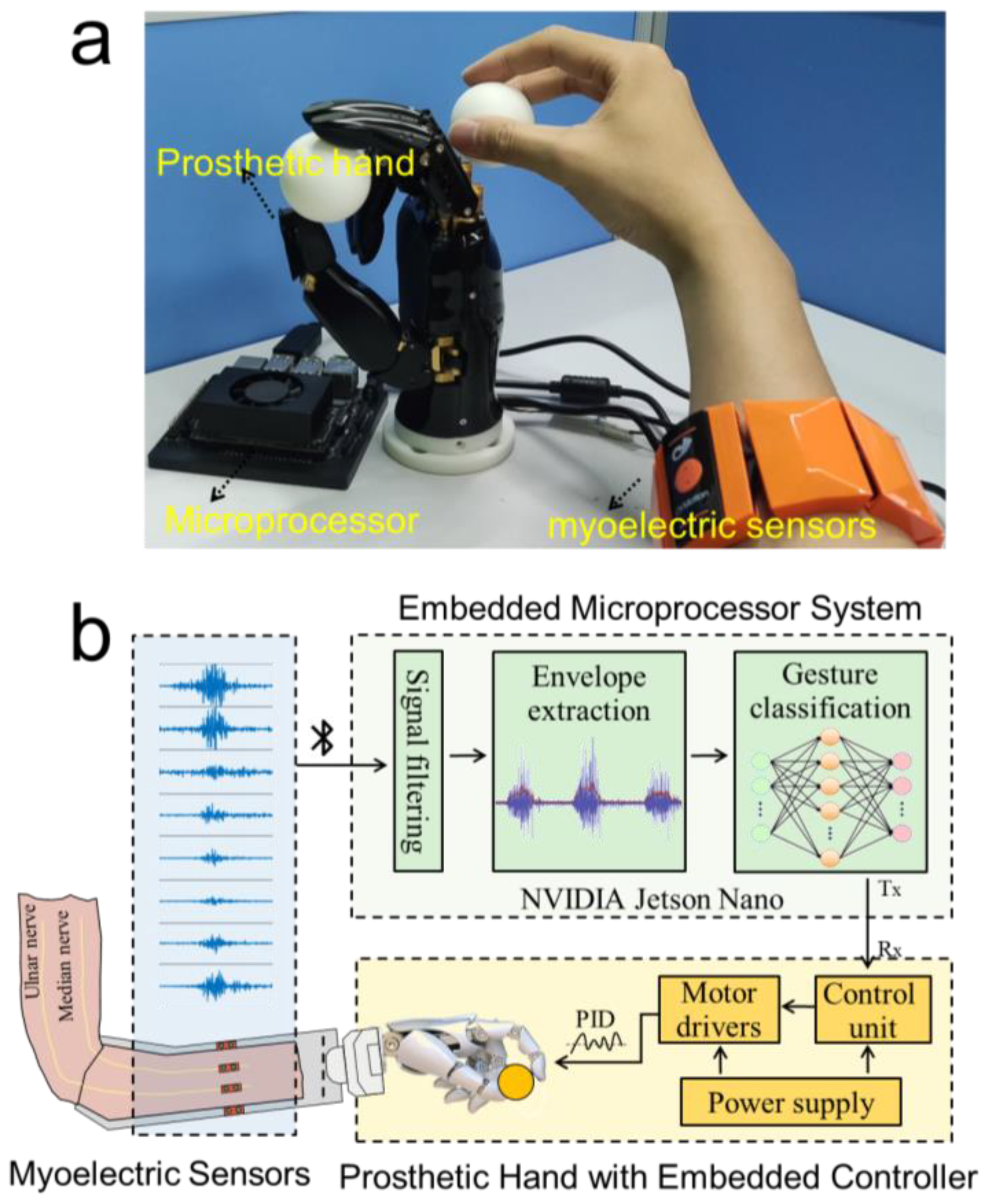
As shown in
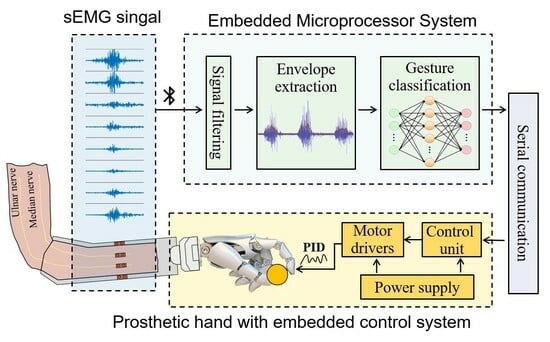
Figure 7a, the hardware of the prosthetic hand control system we proposed is composed of three parts: the myoelectric sensor, the prosthetic hand, and the microprocessor. Among these, the myoelectric sensor is responsible for the real-time collection of the sEMG data when the participant performs the designed gesture. The microprocessor receives the sEMG data collected by the sensor in real-time through Bluetooth, processes and classifies the data, infers the participant’s gesture intention, and sends control commands to the prosthetic hand to perform the intended gestures. To improve the real-time performance of the prosthetic hand control system, we carefully selected the system hardware, adjusted its parameters, and designed the microprocessor. Among them, the information on the sEMG sensor has been given above, and then we will focus on describing the relevant information about the prosthetic hand and the microprocessor.
The dexterous prosthetic hand utilized in this study features a 5-finger design equipped with a linkage transmission mechanism. It incorporates two degrees of freedom (DOFs) for the thumb and one DOF for each of the other fingers, amounting to a total of six DOFs for all five fingers. This configuration allows for the independent control of the bending of the thumb, index finger, middle finger, and ring finger, as well as the independent control of the rotation of the thumb. As a result, it can closely simulate human hand movements. The motors and control circuitry of the prosthetic hand are fully integrated within the hand itself, streamlining its appearance and functionality. Moreover, the hand can be conveniently connected to a computer or other embedded systems through a serial communication protocol, enabling seamless communication and control.
To balance the accurate recognition of intention gestures and the real-time control of the prosthetic hand, the requirements of the system for high performance, small device size, and low power consumption were carefully considered when the system was designed, and the NVIDIA Jetson Nano was employed as the embedded microprocessor. This microprocessor offers a high-performance GPU accelerator and a dedicated deep learning inference engine, allowing for fast and real-time inference capabilities [
26], which make it particularly suitable for applications such as real-time control. Furthermore, the compact size and low power consumption of the microprocessor make it highly convenient to integrate into the prosthetic hand system for compact assembly and enhanced portability. Running on the Jetson Nano microprocessor is the data preprocessing algorithm and pre-trained CNN-ECA model (
Figure 7b), which was developed using the Python programming language by integrating several popular data analysis tools and libraries such as pandas, scipy, loadmat, numpy, and matplotlib. Specifically, the microprocessor received the raw data stream from the myoelectric sensors in real-time through a multithreaded Python program and called the SciPy library to perform signal reprocessing such as filtering and envelope extraction. Then, the reprocessed signals were streamed into the pre-trained CNN-ECA model built on Keras in the TensorFlow library for gesture recognition. The recognition outcomes were converted into control commands and transmitted to the prosthetic hand through the serial port at a baud rate of 115,200. Upon receiving the control commands, the prosthetic hand executed the corresponding gesture through the motor drive module to realize real-time response and control synchronized with the sEMG signals. A threshold value (T) was established based on the envelope signal to prevent the misclassification of motions during muscular relaxation. When the signal exceeded the threshold T, the recognized command was sent to the prosthetic hand, controlling it to do the appropriate action. If the signal dropped below the T threshold, the prosthetic hand stayed in a resting posture. This method ensures accurate and precise control of the prosthetic hand while taking the user’s muscle activity into account.
To ensure the precise and real-time control of the prosthetic hand, we employ the majority vote window technique. This approach collects multiple gesture predictions within a specific time window and selects the final recognized gesture based on the most frequently predicted gesture, following the majority vote principle [
27]. For instance, if we set the majority window size to 10, this means that the model’s predictions for the current gesture are considered in conjunction with the preceding and subsequent 10 predictions within the specified time frame. The final prediction is then determined by the majority vote within this window. The majority window size can be adjusted to balance between rapid response and recognition stability, enhancing the reliability of the system. This technique smooths out momentary misclassifications, resulting in the accurate and dependable control of the prosthetic hand in harmony with the user’s muscle activity.
4. Discussion
This research aims to improve the recognition performance and real-time capabilities of the sEMG prosthetic hand system by developing a sEMG signal processing framework based on the CNN-ECA model. Through comprehensive discussions in this section, we will delve into the methodology, experimental findings, and their significance in the field of EMG gesture recognition.
Deep learning models, with their fast training and inference speeds and powerful feature extraction capabilities, offer benefits in sEMG signal classification tasks. In this study, we use CNN as the base model and introduce the ECA module to improve the model’s attention to crucial features. The experimental results show the satisfactory performance of the CNN-ECA model in gesture recognition tasks. When compared to classical machine learning approaches and current mainstream deep learning models, our model outperforms them in terms of accuracy, recall, and F1 score. Importantly, our model distinguishes between multiple gesture categories better than existing deep learning models, enhancing the classification performance. This demonstrates that the introduction of the ECA mechanism has a positive impact on gesture recognition by increasing the model’s accuracy and focusing on essential information.
While the computational cost was proven to be competitive, it is crucial to delve into the complexity of the model. The low complexity of our model can be attributed to streamlined convolutional layers and the incorporation of the ECA module, which enhances the model’s attention mechanism without introducing unnecessary computational burden. Specifically engineered for efficiency, the ECA module strategically attends to relevant channels within the data, emphasizing crucial information without imposing excessive computational overhead. This ensures that the model becomes more adept at capturing key patterns and features without a proportional increase in computational requirements. This low complexity is advantageous for real-time applications, particularly in the context of prosthetic hand control, where quick and responsive processing is paramount. Notably, the achieved enhancement in accuracy comes without a substantial increase in computational complexity.
In addition, the real-time test with the prosthetic hand exemplifies the practical application of our research. It showcases that our model, with its efficient processing and real-time capabilities, can be effectively employed for controlling prosthetic hands through sEMG signals. The integration of the majority voting window technique allows the system to adapt to users’ muscle activity variations, ensuring the precise and reliable control of the prosthetic hand. A higher number of votes with a larger majority window enhances response stability but introduces a slight delay in recognizing rapid gesture changes, while a smaller number of votes with a smaller window size offers faster response times but may result in more prediction variability due to fewer samples. Moreover, through window adjustments, this study has ensured the real-time accuracy of prosthetic hand control.
Our research also has certain limitations that should be addressed in future work. The relatively small size of our experimental dataset may restrict the model’s generalization ability. Expanding the dataset will enhance the model’s robustness, particularly for individuals with limb amputations. Additionally, although our model has shown good real-time performance, there is room for further improvements in terms of algorithmic and hardware optimizations to enhance efficiency. Future work should explore more attention mechanisms and deep learning model architectures that consider both spatial and temporal aspects of sEMG signals. Developing processing algorithms and model structures tailored for individuals with limb amputations is of great importance. Integrating additional sensors and technologies, such as muscle tension sensors or neural sensing techniques, can further enhance the accuracy and robustness of gesture recognition systems. Moreover, optimizing the user experience and human–computer interaction for individuals with limb amputations will improve their quality of life and social participation. Collaboration and feedback from individuals with limb amputations and rehabilitation professionals will be essential in achieving these goals.
5. Conclusions
This study aims to improve the performance and real-time capabilities of the sEMG gesture recognition system by developing a muscle signal processing framework based on the CNN-ECA model. The application of preprocessing approaches including envelope extraction and sliding window segmentation can effectively extract useful information from surface sEMG data, reduce the influence of noise, and thus improve signal correlation and stability. The sEMG gesture recognition framework of CNN-ECA is developed based on the CNN architecture, where the introduction of the ECA module enabled the model to enhance the focus and capture ability of important features, thereby improving classification performance. Compared to classical machine learning approaches and the current mainstream deep learning models of CNN and CNN-LSTM, the CNN-ECA model we proposed shows significant improvements in the metrics of accuracy, recall, and F1 score. Moreover, the introduction of the ECA module does not significantly reduce the prediction speed of the model while improving the accuracy, implying that the ECA module simultaneously equips the EMG-controlled prosthetic hand system with the characteristics of accurate gesture detection and real-time control. In conclusion, the muscle signal processing framework based on the CNN-ECA model proposed in this study achieves favorable experimental results in the field of EMG gesture recognition. We believe that with further research and improvements, EMG gesture recognition systems will play a greater role in rehabilitation medicine, human–computer interaction, and virtual reality, significantly improving the quality of life and social participation of people with disabilities.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}