




Creating an AI-Enhanced Morse Code Translation System Based on Images for People with Severe Disabilities


Abstract
:1. Introduction
2. Materials and Methods
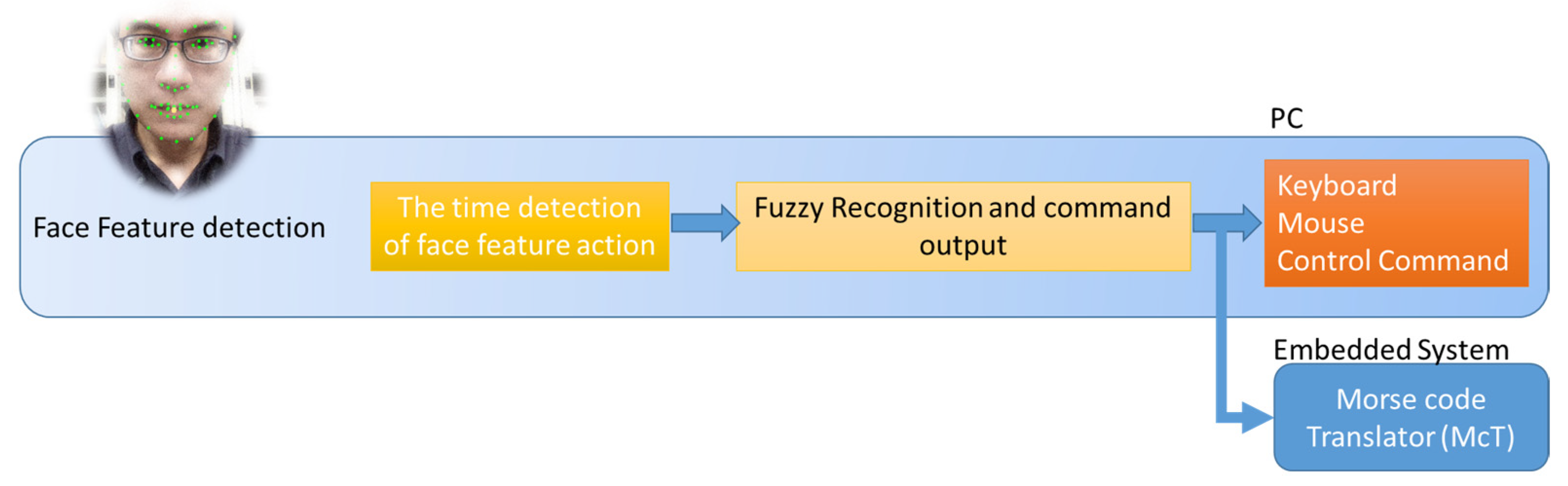
2.1. Face Feature Detection
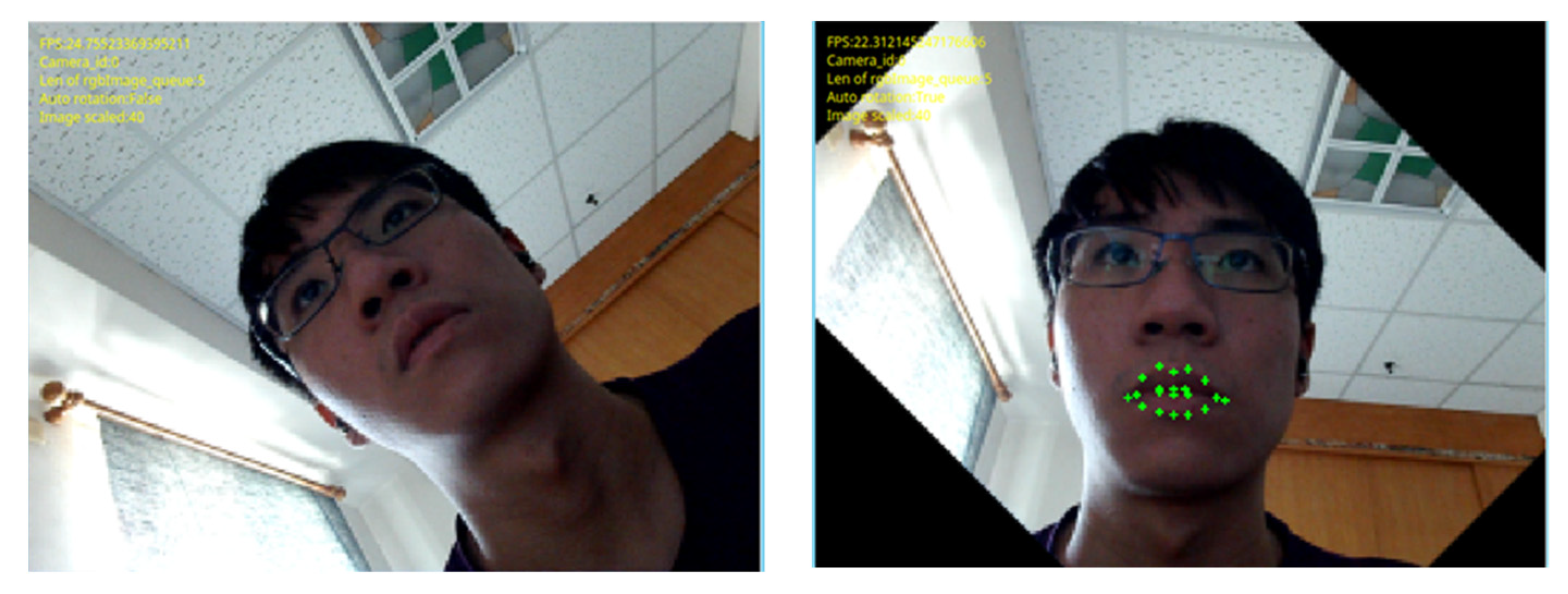
2.1.1. Image Straightening
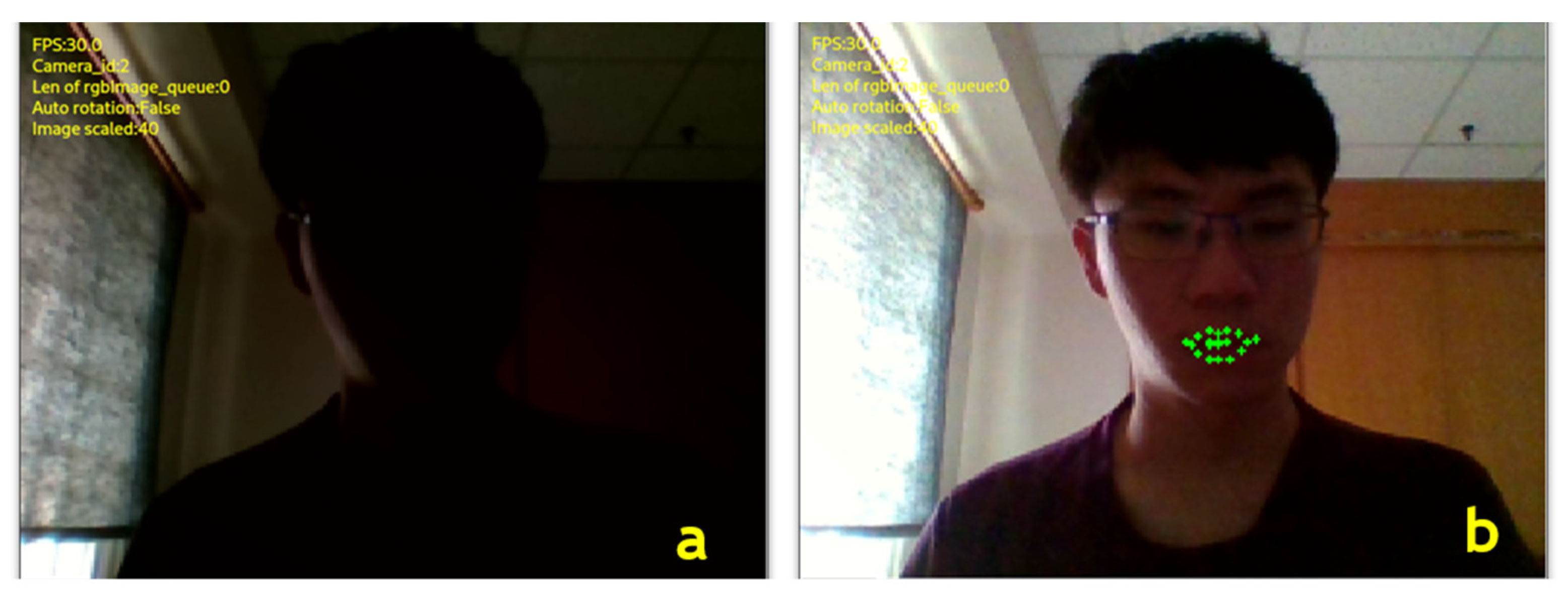
2.1.2. Image Compensation
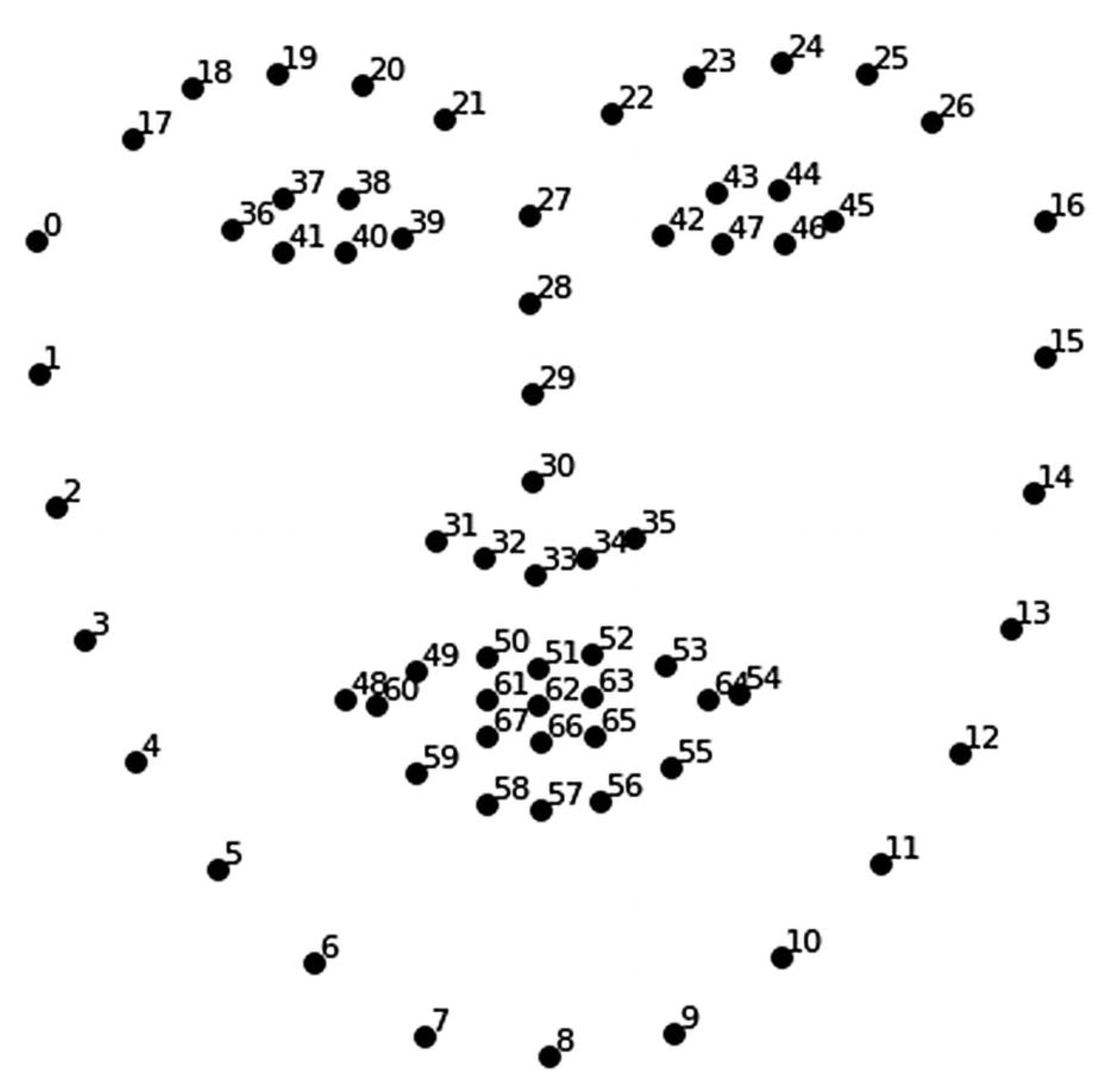
2.1.3. Dlib Module
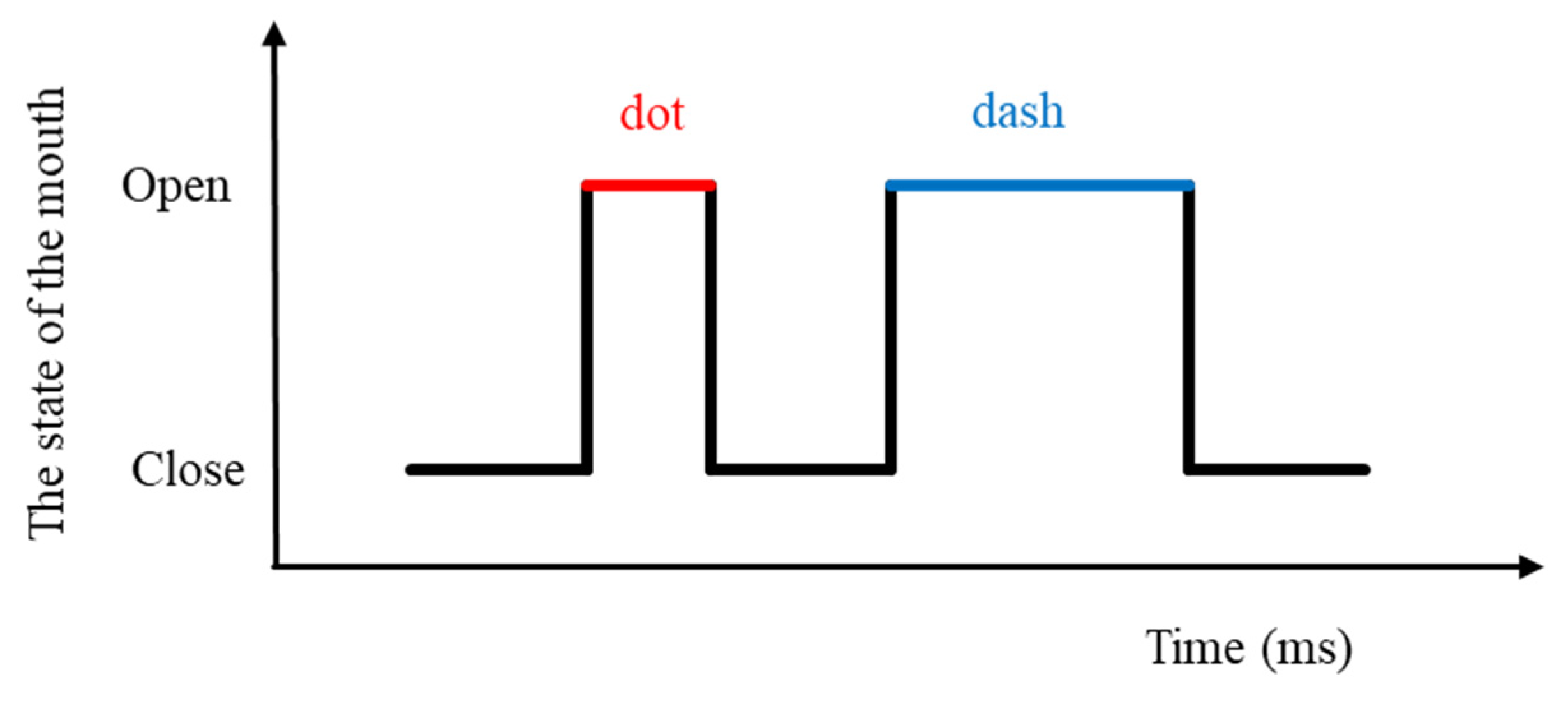
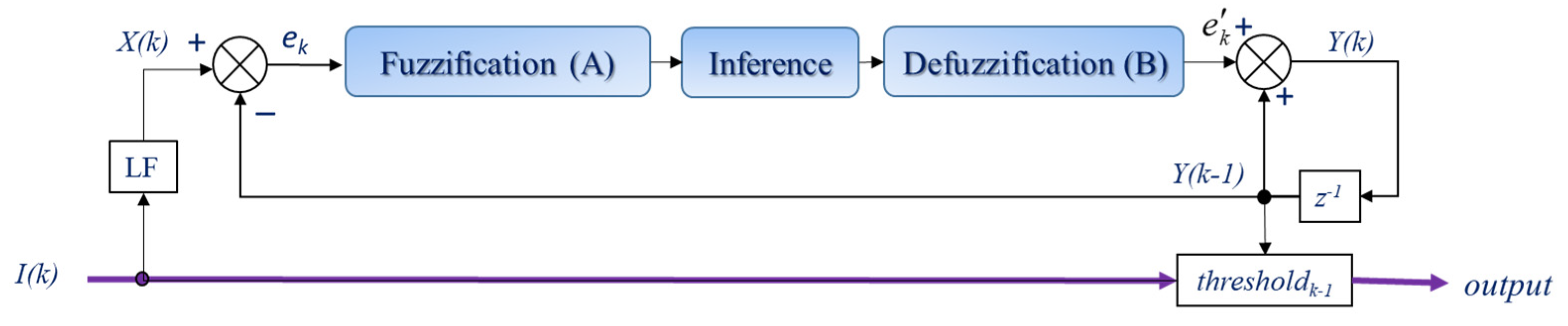
2.1.4. Fuzzy Time Recognition Algorithm
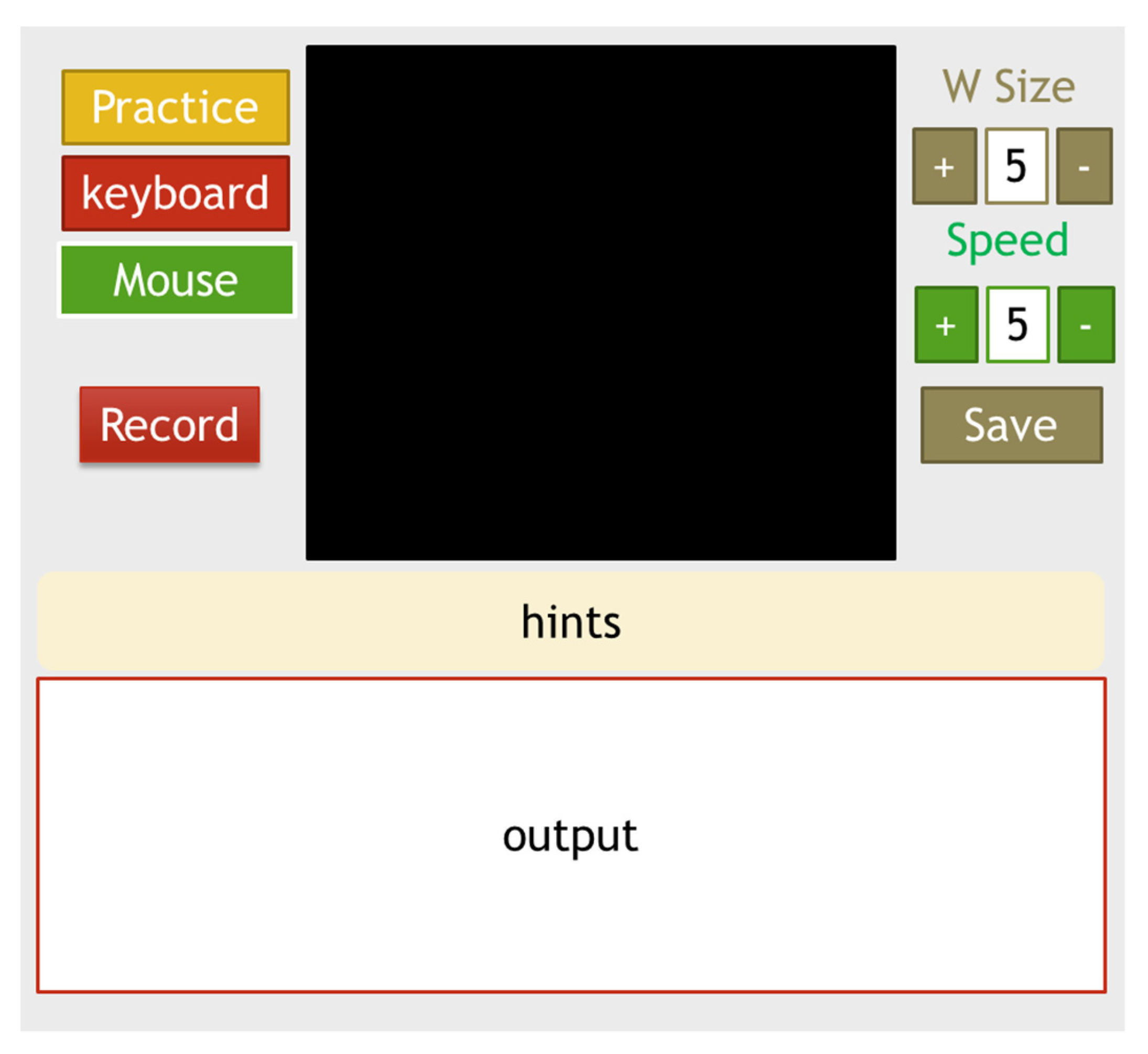
2.2. Human–Computer Interface
3. Results
3.1. AIMcT System
3.1.1. Automatic Image Straightening
3.1.2. Automatic Image Compensation
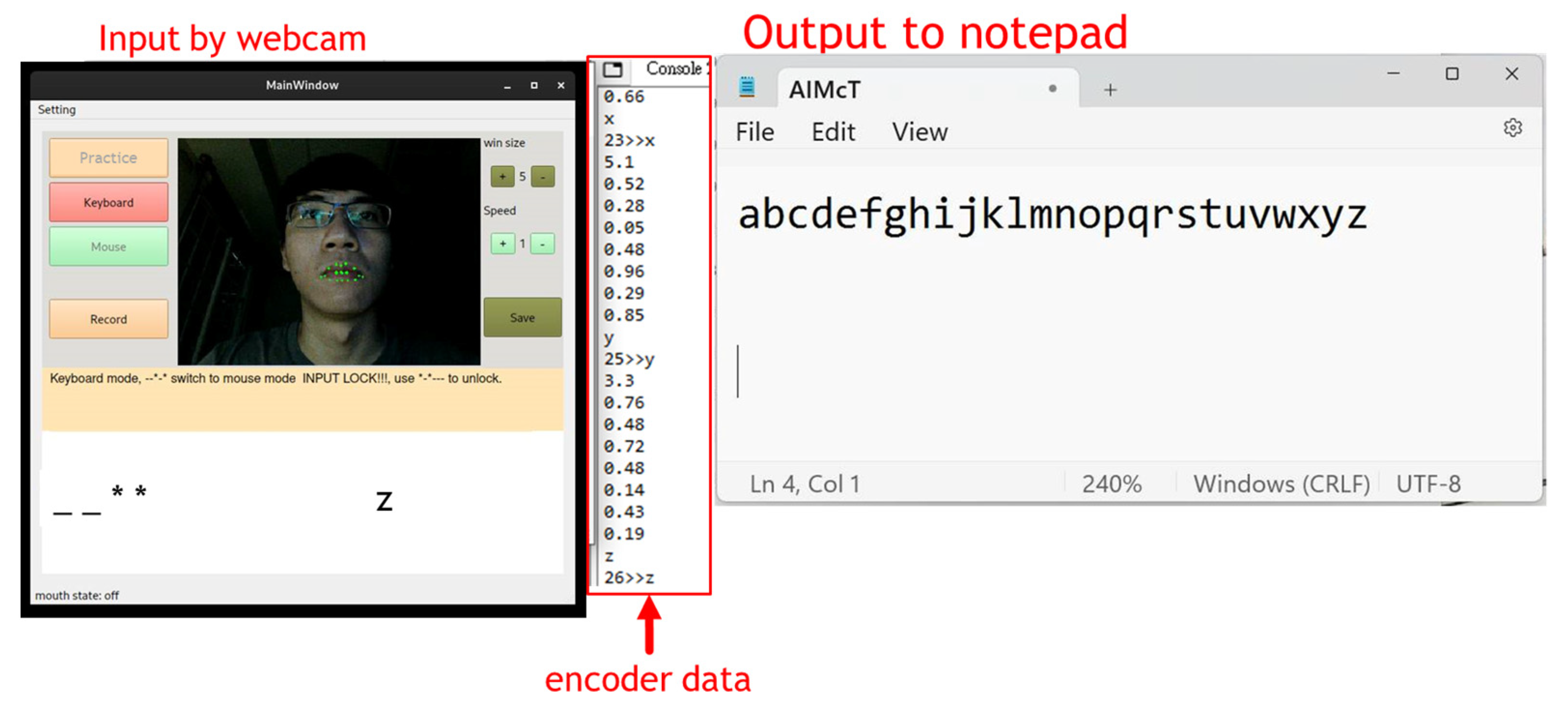
3.2. AIMcT System Performance Test
3.3. Install and Apply
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. How to use the ICF, A Practical Manual for using the International Classification of Functioning, Disability and Health (ICF); The Milbank Quarterly; World Health Organization: Geneva, Switzerland, 1989; p. 67. Available online: https://www.who.int/publications/m/item/how-to-use-the-icf---a-practical-manual-for-using-the-international-classification-of-functioning-disability-and-health (accessed on 29 September 2023).
- Giansanti, D. Synergizing Intelligence and Building a Smarter Future: Artificial Intelligence Meets Bioengineering. Bioengineering 2023, 10, 691. [Google Scholar] [CrossRef] [PubMed]
- Gandhi, T.; Trikha, M.; Santhosh, J.; Anand, S. Development of an Expert Multitask Gadget Controlled by Voluntary Eye Movements. Expert Syst. Appl. 2010, 37, 4204–4211. [Google Scholar] [CrossRef]
- Hornero, G.; Conde, D.; Quilez, M.; Domingo, S.; Rodriguez, M.P.; Romero, B.; Casas, O. A Wireless Augmentative and Alternative Communication System for People with Speech Disabilities. IEEE Access 2015, 3, 1288–1297. [Google Scholar] [CrossRef]
- Radici, E.; Bonacina, S.; De Leo, G. Design and Development of an AAC App Based on a Speech-to-Symbol Technology. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016. [Google Scholar] [CrossRef]
- Jafari, A.; Buswell, N.; Ghovanloo, M.; Mohsenin, T. A Low-Power Wearable Stand-Alone Tongue Drive System for People with Severe Disabilities. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 58–67. [Google Scholar] [CrossRef]
- Garcia, R.G.; Ibarra, J.B.G.; Paglinawan, C.C.; Paglinawan, A.C.; Valiente, L.; Sejera, M.M.; Bernal, M.V.; Cortinas, W.J.; Dave, J.M.; Villegas, M.C. Wearable Augmentative and Alternative Communication Device for Paralysis Victims Using Brute Force Algorithm for Pattern Recognition. In Proceedings of the 2017 IEEE 9th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Manila, Philippines, 1–3 November 2017. [Google Scholar] [CrossRef]
- Hwang, C.-S.; Weng, H.-H.; Wang, L.-F.; Tsai, C.-H.; Chang, H.-T. An Eye-Tracking Assistive Device Improves the Quality of Life for ALS Patients and Reduces the Caregivers’ Burden. J. Mot. Behav. 2014, 46, 233–238. [Google Scholar] [CrossRef] [PubMed]
- Edughele, H.O.; Zhang, Y.; Muhammad-Sukki, F.; Vien, Q.-T.; Morris-Cafiero, H.; Opoku Agyeman, M. Eye-Tracking Assistive Technologies for Individuals with Amyotrophic Lateral Sclerosis. IEEE Access 2022, 10, 41952–41972. [Google Scholar] [CrossRef]
- Chen, Y.-L. Application of Tilt Sensors in Human-Computer Mouse Interface for People with Disabilities. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 289–294. [Google Scholar] [CrossRef] [PubMed]
- LoPresti, E.F.; Brienza, D.M.; Angelo, J. Head-Operated Computer Controls: Effect of Control Method on Performance for Subjects with and without Disability. Interact. Comput. 2002, 14, 359–377. [Google Scholar] [CrossRef]
- Evans, D.G.; Drew, R.; Blenkhorn, P. Controlling Mouse Pointer Position Using an Infrared Head-Operated Joystick. IEEE Trans. Rehabil. Eng. 2000, 8, 107–117. [Google Scholar] [CrossRef]
- Chen, Y.L.; Tang, F.T.; Chang, W.H.; Wong, M.K.; Shih, Y.Y.; Kuo, T.S. The new design of an infrared-controlled human-computer interface for the disabled. IEEE Trans Rehabil Eng. 1999, 7, 474–481. [Google Scholar] [CrossRef]
- Anwer, S.; Waris, A.; Sultan, H.; Butt, S.I.; Zafar, M.H.; Sarwar, M.; Niazi, I.K.; Shafique, M.; Pujari, A.N. Eye and Voice-Controlled Human Machine Interface System for Wheelchairs Using Image Gradient Approach. Sensors 2020, 20, 5510. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-T.; Jiang, W.-L.; Chen, S.-F.; Huang, K.-C.; Liao, L.-D. Design of a Wearable Eye-Movement Detection System Based on Electrooculography Signals and Its Experimental Validation. Biosensors 2021, 11, 343. [Google Scholar] [CrossRef]
- Wu, C.-M.; Chuang, C.Y.; Hsieh, M.-C.; Chang, S.-H. An Eye Input Device for Persons with The Motor Neuron Diseases. Biomed. Eng. Appl. Basis Commun. 2013, 25, 1350006. [Google Scholar] [CrossRef]
- Lee, K.-R.; Chang, W.-D.; Kim, S.; Im, C.-H. Real-Time “Eye-Writing” Recognition Using Electrooculogram. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 37–48. [Google Scholar] [CrossRef]
- Xiong, D.; Zhang, D.; Zhao, X.; Zhao, Y. Deep Learning for EMG-Based Human-Machine Interaction: A Review. IEEE/CAA J. Autom. Sin. 2021, 8, 512–533. [Google Scholar] [CrossRef]
- Shenoy, P.; Miller, K.J.; Crawford, B.; Rao, R.P.N. Online Electromyographic Control of a Robotic Prosthesis. IEEE Trans. Biomed. Eng. 2008, 55, 1128–1135. [Google Scholar] [CrossRef] [PubMed]
- Qi, J.; Jiang, G.; Li, G.; Sun, Y.; Tao, B. Intelligent Human-Computer Interaction Based on Surface EMG Gesture Recognition. IEEE Access 2019, 7, 61378–61387. [Google Scholar] [CrossRef]
- Palaniappan, R.; Paramesran, R.; Nishida, S.; Saiwaki, N. A New Brain-Computer Interface Design Using Fuzzy ARTMAP. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 10, 140–148. [Google Scholar] [CrossRef]
- Lebedev, M.A.; Nicolelis, M.A.L. Brain–Machine Interfaces: Past, Present and Future. Trends Neurosci. 2006, 29, 536–546. [Google Scholar] [CrossRef]
- Birbaumer, N. Brain–Computer-Interface Research: Coming of Age. Clin. Neurophysiol. 2006, 117, 479–483. [Google Scholar] [CrossRef]
- Chen, J.; Yu, Z.; Gu, Z.; Li, Y. Deep Temporal-Spatial Feature Learning for Motor Imagery-Based Brain–Computer Interfaces. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2356–2366. [Google Scholar] [CrossRef]
- Huang, H.; Xie, Q.; Pan, J.; He, Y.; Wen, Z.; Yu, R.; Li, Y. An EEG-Based Brain Computer Interface for Emotion Recognition and Its Application in Patients with Disorder of Consciousness. IEEE Trans. Affect. Comput. 2021, 12, 832–842. [Google Scholar] [CrossRef]
- Shao, L.; Zhang, L.; Belkacem, A.N.; Zhang, Y.; Chen, X.; Li, J.; Liu, H. EEG-Controlled Wall-Crawling Cleaning Robot Using SSVEP-Based Brain-Computer Interface. J. Healthc. Eng. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Benzy, V.K.; Vinod, A.P.; Subasree, R.; Alladi, S.; Raghavendra, K. Motor Imagery Hand Movement Direction Decoding Using Brain Computer Interface to Aid Stroke Recovery and Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 3051–3062. [Google Scholar] [CrossRef]
- Wu, C.-M.; Chen, S.-C.; Chen, Y.-J. Developing a Scanning Assistive Input Device for the Severely Disabled to Operate the Computers and Mobile Devices. J. Internet Technol. 2020, 21, 2029–2037. [Google Scholar]
- Wu, C.-M.; Chen, Y.-J.; Chen, S.-C.; Yeng, C.-H. Wireless Home Assistive System for Severely Disabled People. Appl. Sci. 2020, 10, 5226. [Google Scholar] [CrossRef]
- Cootes, T.F.; Edwards, G.J.; Taylor, C.J. Active Appearance Models. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 681–685. [Google Scholar] [CrossRef]
- Wang, M.; Deng, W. Deep Face Recognition: A Survey. Neurocomputing 2021, 429, 215–244. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MCT | AIMcT | |
|---|---|---|
| Production | hardware | software |
| Making process | time consuming | time saving |
| Price | higher | lower |
| Core | microprocessor | computer/embedded system |
| External switch | contact | contactless |
| Update | difficult | easy |
| Maintain | difficult | easy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.-M.; Chen, Y.-J.; Chen, S.-C.; Zheng, S.-F. Creating an AI-Enhanced Morse Code Translation System Based on Images for People with Severe Disabilities. Bioengineering 2023, 10, 1281. https://doi.org/10.3390/bioengineering10111281
Wu C-M, Chen Y-J, Chen S-C, Zheng S-F. Creating an AI-Enhanced Morse Code Translation System Based on Images for People with Severe Disabilities. Bioengineering. 2023; 10(11):1281. https://doi.org/10.3390/bioengineering10111281
Chicago/Turabian StyleWu, Chung-Min, Yeou-Jiunn Chen, Shih-Chung Chen, and Sheng-Feng Zheng. 2023. "Creating an AI-Enhanced Morse Code Translation System Based on Images for People with Severe Disabilities" Bioengineering 10, no. 11: 1281. https://doi.org/10.3390/bioengineering10111281
APA StyleWu, C.-M., Chen, Y.-J., Chen, S.-C., & Zheng, S.-F. (2023). Creating an AI-Enhanced Morse Code Translation System Based on Images for People with Severe Disabilities. Bioengineering, 10(11), 1281. https://doi.org/10.3390/bioengineering10111281