3.1. Overland Flow
Table 4 shows the runoff values of each simulation, separated by the single rainfall events. Additionally, the calculated runoff-coefficients are specified.
Detailed hydrographs were plotted as a result of the high-resolution sampling method. Exemplary hydrographs basing upon simulation runs on different surfaces (simulations #2, #6, #10, #14 and #19) give an insight in unprocessed datasets (
Figure 4). They show typical runoff patterns of the respective surface category.
Both fortified and unfortified forest roads show runoff rates that are significantly different compared to undisturbed forest topsoil. After only a few minutes into the first rainfall event, both surfaces show an almost instantaneous shift from no measurable runoff to flow rates in the range of the rainfall input. By comparison, the unfortified road tends to generate high runoff amounts earlier during the first minutes of each rainfall event.
The rutted skid trail shows the most apparent pattern of successive topsoil saturation. During rainfall Event 1, the first runoff is already measured after 3 min—presumably because of the hydrophobicity of the soil (WDPT class 2)—and an increased amount of runoff generation starts at 7 min. Towards the end of the second rainfall event, the rutted skid trail already shows runoff comparable to the rainfall input. A fast saturation at the beginning of Event 3 is clearly visible. After this response time, runoff volumes level off at rainfall input rates, representing an assumed 100% saturation of the topsoil leading to saturation flow conditions.
On the unrutted skid trail, no runoff was measured until Minute 18, which indicates a comparatively high infiltration rate of the topsoil. Even the following rainfall events show a distinct saturation stage, as there are 4 (Event 2) and 6 (Event 3) min without any runoff at the beginning of each event.
The undisturbed forest soil shows a stable but almost negligible overland flow. There is no noticeable pattern of rising runoff rates, which shows that even after 90 min rainfall with a rainfall intensity of 45 mm·h−1 and 43.6 L rainfall applied to the plot surface, the infiltration capacity is not exceeded. The measured runoff volumes represent only a small amount of HOF that occurs because of the high rainfall intensity.
The hydrographs also show an example for calculating the possible deviation of rainfall intensity during the simulations: There are data points that indicate more runoff than applied rainfall, especially when looking at the third event on fortified and unfortified roads. For example, the deviation for simulation #2, conducted on a fortified road is displayed in
Figure 4 as grey area above the indicated amount of rainfall. The CV of the runoff in the last 5 min was 1.2%, implying stable runoff conditions with a mean C of 107%—therefore, a deviation of 7% was assumed.
The largest deviation in the whole dataset was observed during simulation #5 with a mean C of 109% and a CV of 2.2% during Minutes 85–90. Because of that, a possible general error of 10% was accounted for all of the experiments and integrated in
Figure 6 which shows the aggregated volumes of runoff and infiltration for each surface category. Nevertheless, all of the simulations showed a total C of <100% (
Table 4). Besides the possibility of deviating rainfall intensities, a partial retention of the superficially flowing water caused by irregularities on the plot surface, for example imprinted tire treads, may also have caused higher C-values towards the end of the simulations. In those imprints, small pools of water were built up, which were drained when the structures were eroded by splash and flowing water.
Figure 5 provides an example observed on a rutted forest road.
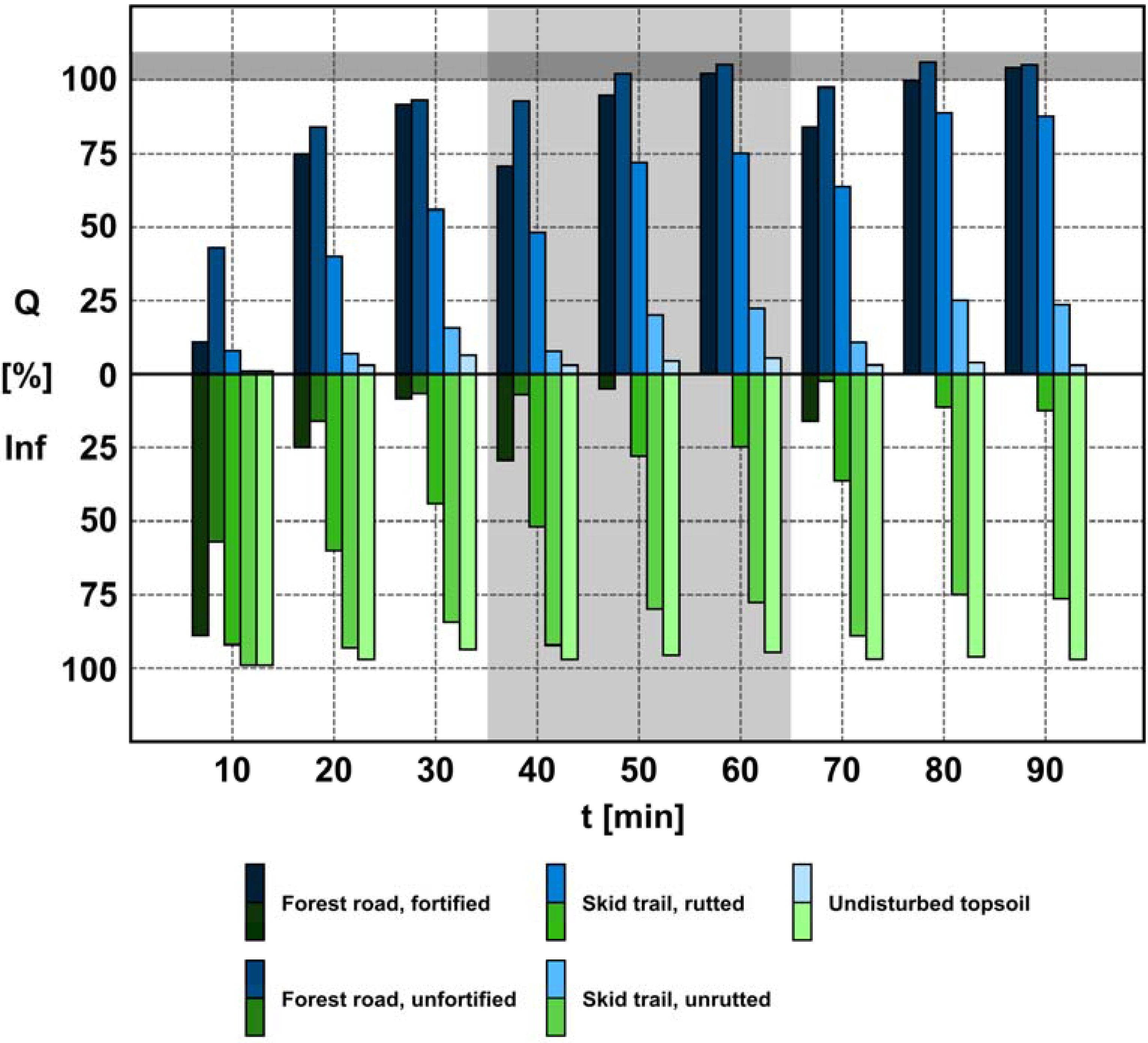
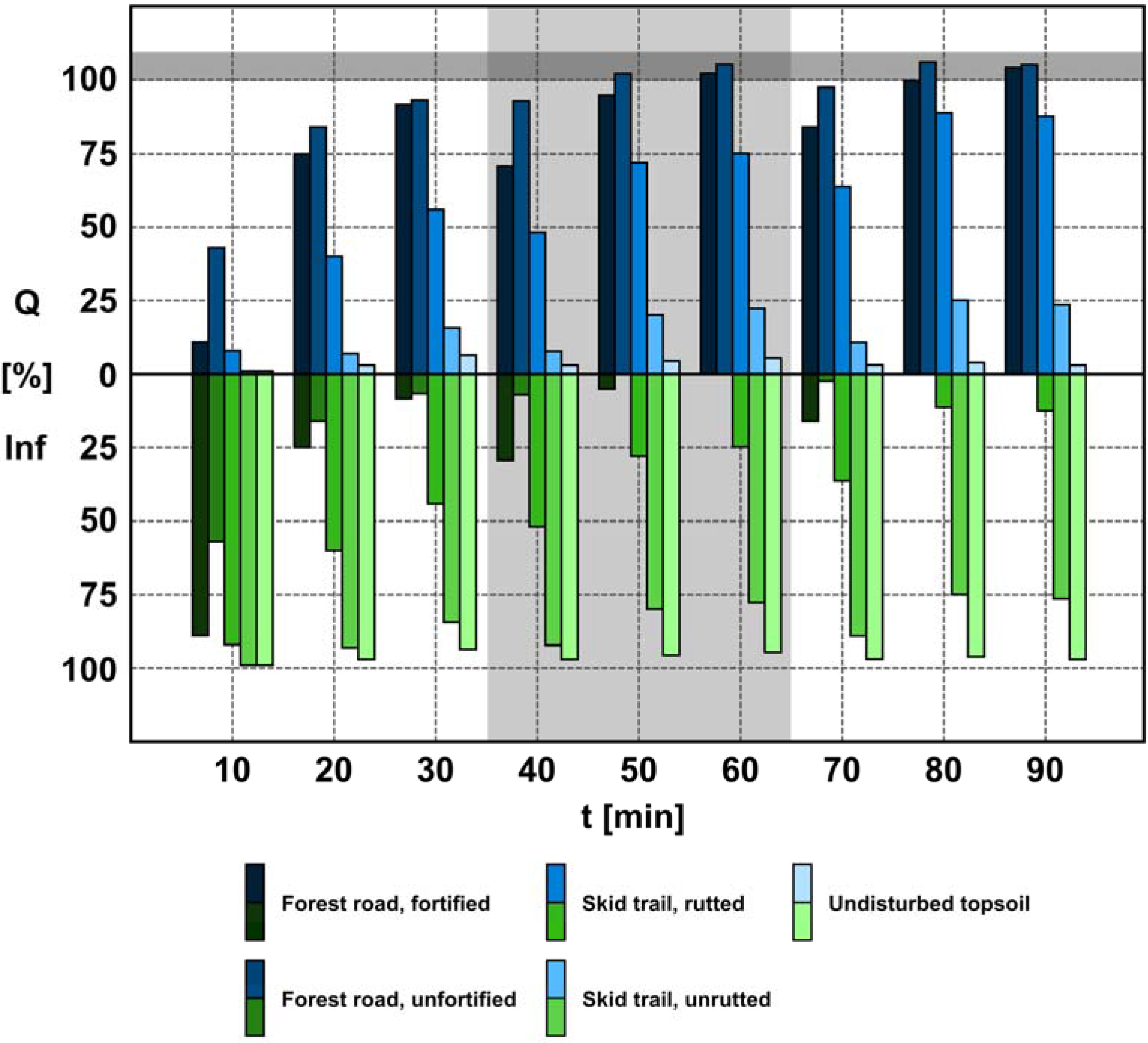
The described runoff patterns also apply to the mean values of each category. These datasets are displayed as processed datasets, the mean percentages of runoff and infiltration for each surface category with a time interval of 10 min (
Figure 6).
Again, forest roads produce the highest runoff of all surface types. Only during the first 10 min of rainfall Event 1 both surfaces show higher infiltration than runoff. Hereafter, the mean runoff volumes are permanently higher. When looking at the mean runoff volumes of all simulation runs (
Table 5), the fortified surfaces show lower runoff volumes than unfortified roads. Both surfaces are compacted but there is a constructional difference between them that causes the deviating runoff patterns. Most likely it can be assumed that the base course featured on fortified roads led to, on average, larger soil pores compared to graded unfortified roads, as the coarse material stabilizes the matrix and therefore the pore system to a certain degree. Fine material between the crushed stones is not compacted that much compared to graded surfaces where the whole topsoil is affected thoroughly and an almost complete loss of pore volume has to be stated. Additionally, fortified roads feature higher percentages of sand, presumably because of the insertion of extraneous material, which again leads to a higher porosity of the topsoil.
The skid trails showed comparatively great differences between rutted and unrutted areas. According to the findings presented on the basis of
Figure 4, the saturation of the soil successively proceeds over the three rainfall events leading to only minor infiltration volumes in case of rutted surfaces.
Here, the mean runoff percentage of rainfall Event 3 exceeds the values of rainfall Event 1 on forest roads. It is assumable, that the saturation of the topsoil would proceed and eventually cause a runoff pattern similar to forest roads if the duration of the simulated rainfall was prolonged. As the road surfaces represent a certain reference point for the generation of HOF over time, an almost completely saturated soil has to be expected within additional 60 min. This tendency is not expectable for unrutted surfaces, as they merely reach runoff percentages of 25% within rainfall Event 3.
Undisturbed topsoil shows only minimal runoff percentages. Also, the variation between each rainfall event is minimal. This indicates a stable infiltration rate, which leads to almost no notable HOF; therefore, the topsoil was not saturated.
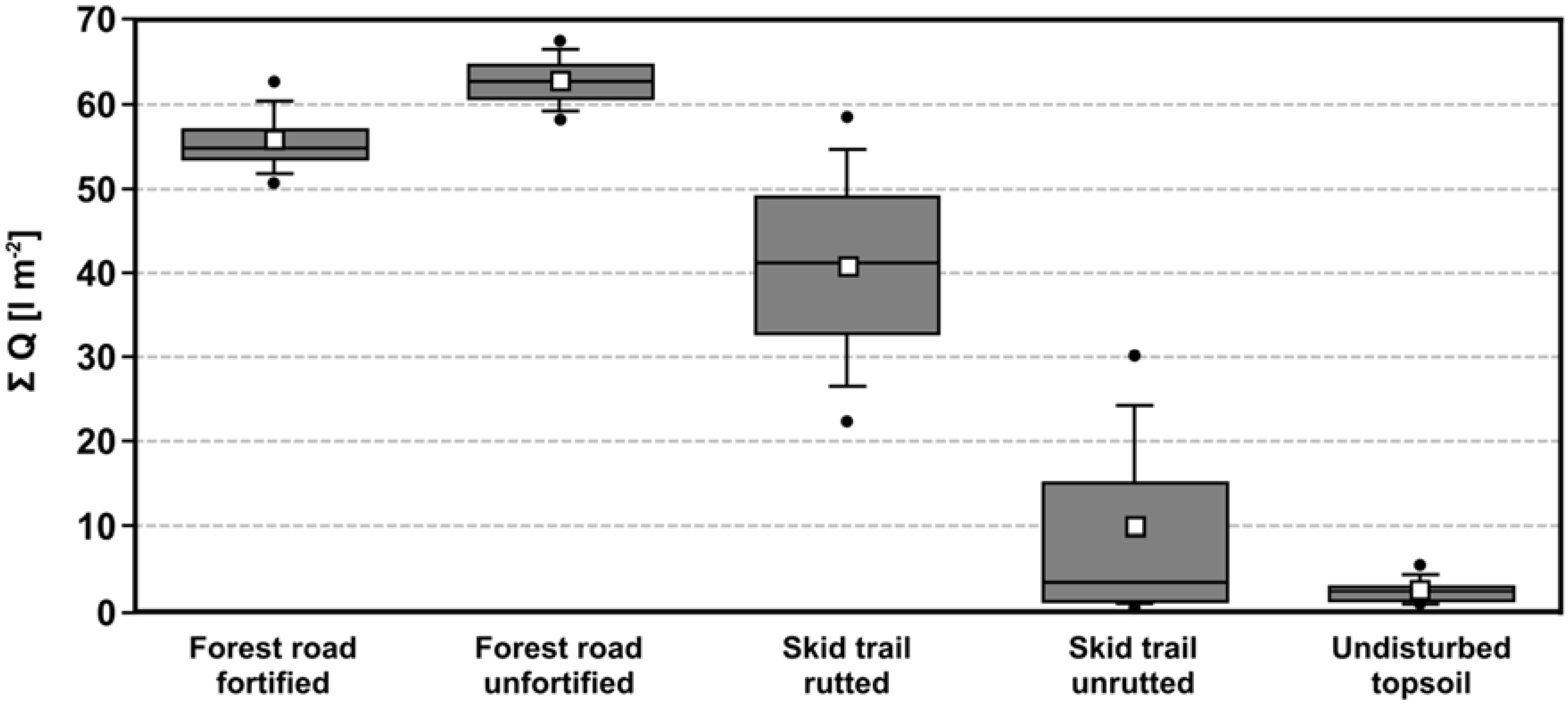
In addition to the study of the temporal changes in runoff and infiltration, a statistical analysis of the mean values for each category provides a better insight and allows addressing significant differences between surface types.
Figure 7 shows the boxplots for each surface category,
Table 5 the mean total runoff volumes and resulting runoff coefficients.
As expected, both forest road types show high C-values because of soil compaction resulting from constructional measures. Comparatively fast topsoil saturation in case of graded road surfaces is reflected in a slightly higher runoff-coefficient. The most noticeable result was achieved on rutted skid trails. Even though no fortification was existent and only the weight of forestry equipment caused a soil compaction, the mean runoff-coefficient lies clearly above the mean C-values of undisturbed forest topsoil, showing a 16-times higher percentage of overland flow. This increase does not only occur on rutted skid trails but also on unrutted parts. Here, the mean runoff-coefficient is noticeably lower than on rutted surfaces but it is still four times higher than the mean values of undisturbed soil, indicating a compacted soil.
In an additional step, differences between surface categories were tested regarding their significance (
Table 6). As expected, the Mann–Whitney test showed significant differences between among road categories, unrutted skid trails and undisturbed topsoil. Apart from that, rutted skid trails showed no significant difference from forest roads, indicating the increased runoff volumes due to topsoil compaction. In contrast, unrutted skid trails show a strong similarity with undisturbed topsoil.
To investigate, if plot characteristics influenced the runoff generation, Spearman-Rho coefficients were calculated (
Table 7).
There are identifiable significant correlations between the mean runoff sum and cover, gravel content and WDPT class when observing all conducted experiments. These strong correlations have to be relativized, as vegetation cover, gravel content and WDPT class differ depending on the constructional layout of the road surface. To avoid a spurious relationship, it is helpful to consider category-based values. Because of the rather small population in each surface category, only few significant correlations were achieved. The most noticeable correlations were found for rutted skid trails; here, a strong negative correlation between vegetation cover and mean runoff volume is existent. A strong positive correlation between WPDT class and mean runoff volume was also confirmed, indicating higher runoff volumes with severer water repellency.
Compared to existent studies discussing the influence of roads and skid trails in Central Europe, the findings presented in this study show similar results. Rainfall simulations with a comparable intensity conducted by [
5] showed a median runoff-coefficient of 78.6% on skid trails and harvester tracks. In contrast, a median of only 0.2%–1.3% was measured on undisturbed topsoil. Therefore, an even higher influence of skid trails was determined, making the presented results appear plausible—related results were also confirmed by [
15,
32]. Along with skid trails, forest roads are characterized as a potential source of overland flow, endangering the water retention potential in forested catchments [
69]. This finding could be confirmed by the conducted rainfall experiments. Reported increases of overland flow due to forest roads and soil compaction on skid trails for catchments outside Central Europe and obtained by rainfall simulations with divergent intensities also confirm these findings [
4,
6,
17,
24,
26,
33,
34,
35,
55]: Here, for example, a faster generation of overland flow on forest roads was proven, most likely caused by soil compaction [
4,
33,
34,
35]. Despite covering only a small percentage of a catchment, road surfaces were accounted for a runoff increase of 10% in selected catchments [
6]. Especially the parts of the road lacking a vegetation cover were addressed as areas showing noticeably higher runoff coefficients [
33,
34,
35]. One of the few studies that explicitly compare undisturbed sites with skid trails showed with the help of comparably large runoff plots (2 × 15 m and 2 × 10 m) that skid trails generated a mean of 11.99 L·m
−2 over a period of two months. In contrast, undisturbed sites only generated 0.13 L·m
−2 [
55].
3.2. Soil Erosion
As a consequence of the generated overland flows, the expected soil erosion processes developed.
Table 8 shows the eroded sediment sums for every simulation and rainfall event.
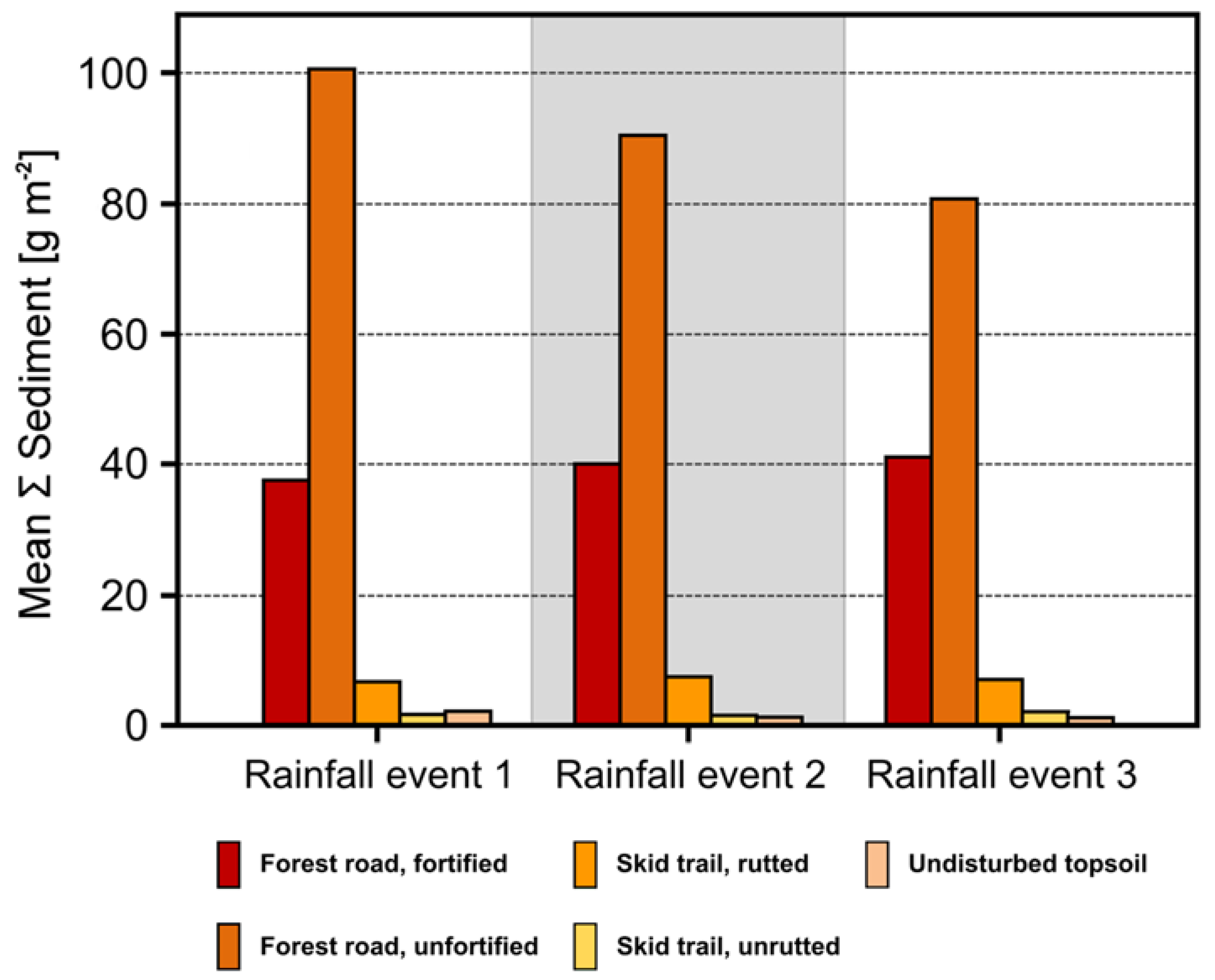
Regarding the mean total eroded sediment for each rainfall event, it is clearly visible, that forest roads showed the highest erosion rates during the simulation runs, whereas on skid trail surfaces and undisturbed topsoil virtually negligible amounts of sediment were eroded (
Figure 8).
Forest roads generated the highest sums of eroded sediment because of two main reasons: On the one hand, an overland flow sufficient for erosional processes was generated in the first place. On the other hand, the vegetation cover was removed due to grading and compaction of the road surface. Beyond that, pioneer flora that could trigger an ecological succession was repeatedly removed because of the continuous use of the road by forestry vehicles.
The bare surfaces are much more vulnerable to erosion processes induced by rainfall and overland flow than skid trail surfaces and forest topsoil, where interception by vegetation and forest floor occurs. Thus, not only the incoming rainfall is retained; since the first impact of the raindrops occurs on understory vegetation or litter, the effect of splash erosion is significantly diminished.
Erosion rates on forest roads were significantly higher than those measured on undisturbed soil and skid trails. Mean sediment sums of fortified and unfortified roads were 36- and 68-times higher than on forest topsoil, respectivly. In the course of the simulation, forest roads showed erosion rates that even exceeded literature values for agricultural land in Central Europe [
70].
A closer look at the different surface types reveals that fortified forest roads produced an almost constant sediment yield during all rainfall events, while the unfortified road surfaces yielded decreasing amounts of sediment (
Table 9).
This temporal pattern is directly linked to the missing fortification on graded roads. Here, the surface is compacted to ensure the trafficability, but the lack of a base course that stabilizes the whole roadway allows tire treads to dig deep into the surface and to detach entire soil aggregates. This material is now prone to soil erosion processes as it is no longer embedded in the compacted matrix. During the three rainfall events, recently detached particles were gradually eroded, leading to a more and more decreasing erosion rate as the percentage of already transportable soil was diminished and particles at first had to be detached by splash and flowing water.
In contrast, fortified roads showed a comparatively high soil erosion rate because of the bare surface, but because of the stabilized roadbed there was only a certain kind of base value that could be eroded from the topmost soil layer. In this case, constant rainfall kinetic energy and intensity limited the amount of detached and eroded sediment. It is assumable, that unfortified roads would eventually show similar erosion rates, once all of the previously traffic-detached material is washed off the plot surface.
Another simultaneously observable process that potentially limits the soil erosion rates over time is selective soil erosion. Splash detachment and particle transport by flowing water particularly affects high erodible grain sizes like fine sand and silt. Therefore, these grain fractions are transported away from the surface leaving mainly coarse fractions like larger sand and gravel. Over time, these coarse grains function as an armoring layer, a stone mulch preventing the erosion of finer soil particles beneath them or in their immediate vicinity. If the kinetic energy of the applied rainfall is insufficient for detaching the armoring layer, a decreasing soil erosion rate has to be expected. After 90 min of artificial rainfall, however, an enrichment of coarse material was observed (
Figure 9).
A concluding analysis of the particle-size-distribution using sedimentation was conducted to specify the soil properties of the irrigated plots and to evaluate the possible differences between the initial particle-size-distribution and the grain size composition of the eroded material. As skid trails and forest soils did not generate sufficient erosion to obtain enough material for sedimentation analysis, only samples of forest roads were examined.
Figure 10 features the results of both plot surfaces and mean values for different surfaces. On the basis of the grain-size-distribution, it is clear to see that the unfortified, graded roads show soil textures akin to skid trails and undisturbed topsoil. Both were classified as sandy loam according to USDA soil taxonomy. Again, this indicates that no alteration of the soil texture by any fortification was existent. In contrast to that, fortified roads showed higher percentages of sand, even leading to a classification as another soil type, loamy sand.
Compared to these results, fortified and unfortified roads showed almost identical grain-size-distributions of the eroded material. Both mean soil textures are distinctly finer than their reference specimen. This result is related to the constant rainfall characteristics, which limited the maximum grain size erodible by splash and flowing water. Therefore, both particle-size distributions approximate each other. In this connection, the mean results provide a strong evidence for constant rainfall characteristics during all simulated rainfall events. Beyond that, a selective erosion of fine particles is evident.
Additionally,
Table 10 shows the percentage of gravel (particles >2 mm). Mixed samples of fortified roads were intentionally taken exclusive of base course material to examine only the topmost layer that was affected by erosional processes. Again, the limited kinetic rainfall energy caused a distinct difference between eroded soil and the mixed samples of the plot surfaces. While the roads featured almost 50% gravel, only 0.5% and 1.1% of gravel, respectively, was eroded. As explained with the aid of
Figure 9, this shows the selective soil erosion observed during the simulation runs.
Still, the results show another allusion to selective erosion considering the results of the mixed samples. The increased percentage of gravel of unfortified forest roads compared to skid trails und forest topsoil most likely indicates an already lacking part of finer particles that was already eroded when the sample was taken.
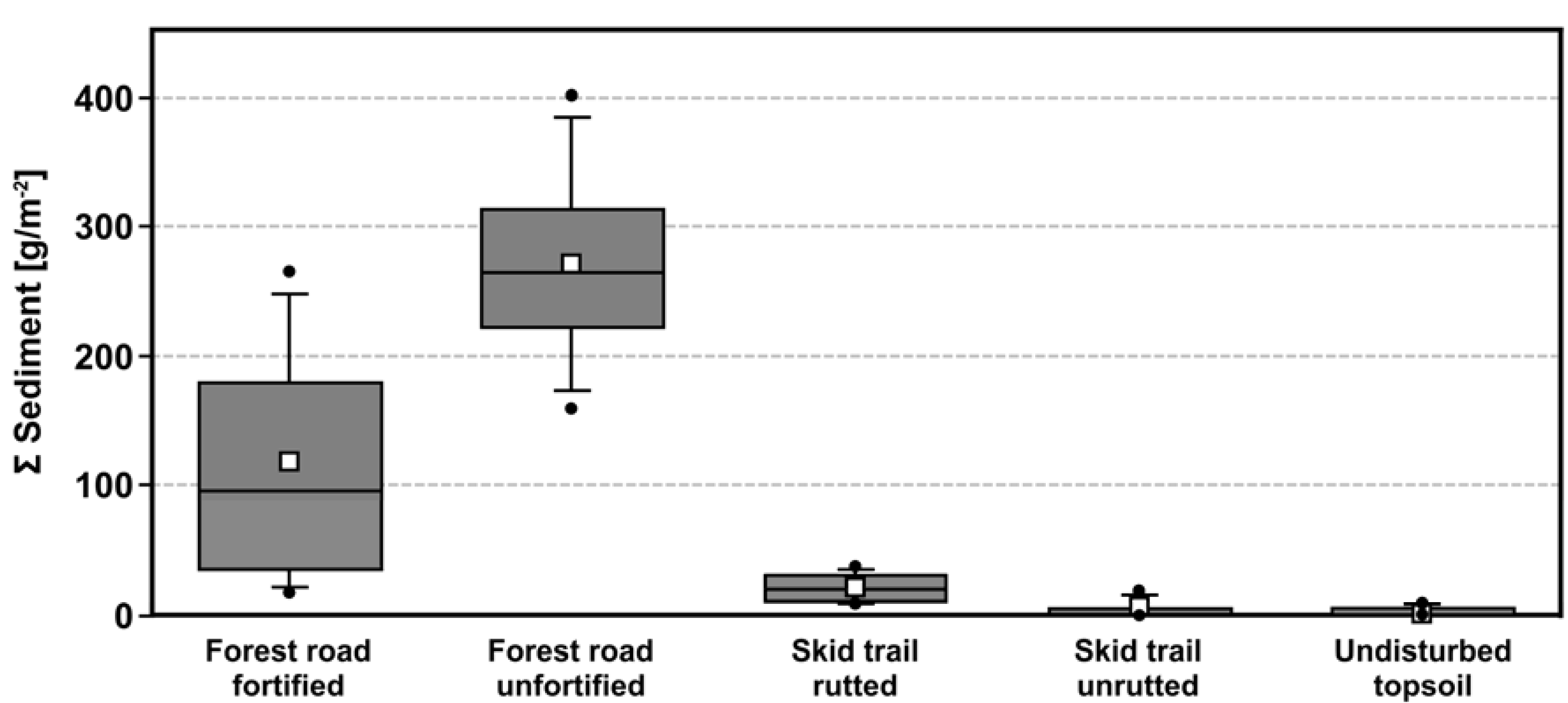
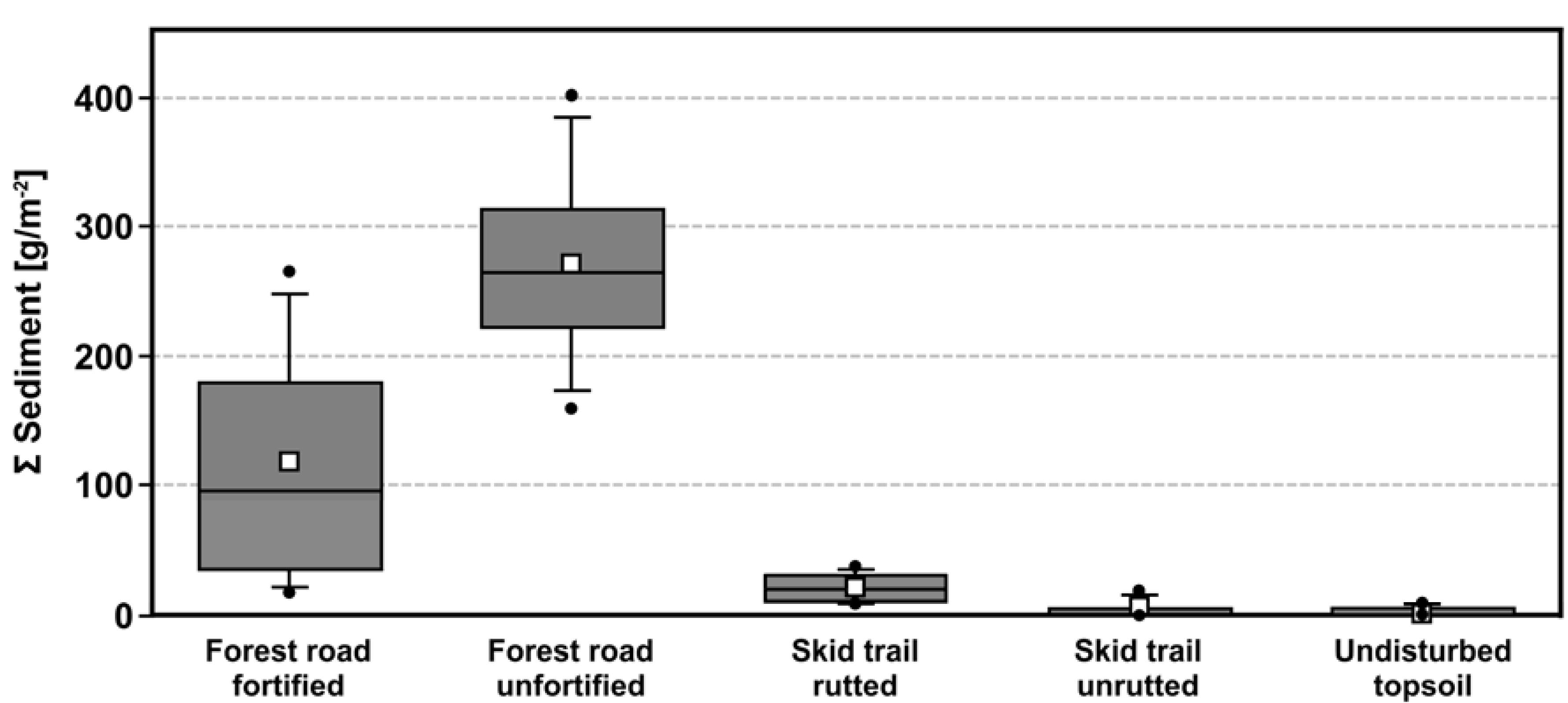
Soil erosion processes were also investigated on a statistical basis. With the help of Boxplot-Diagrams of the mean erosion sums for each surface category, the distinct difference between mostly bare road surfaces and predominantly vegetated skid trails and undisturbed sites is clearly visible (
Figure 11).
The Mann–Whitney test (
Table 11) shows significant similarities between fortified and unfortified forest roads as well as between unrutted skid trails and undisturbed sites. Rutted skid trails are only similar to fortified roads, indicating a transitional stage between heavily disturbed road surfaces and mostly undisturbed sites.
Again, Spearman-Rho correlations were calculated to investigate, if there were any significant correlations between plot characteristics and soil erosion processes. Only vegetation cover, plot sloping, soil bulk density and gravel content were examined, as soil moisture and WDPT class were not believed to have a direct influence. In exchange, the mean runoff sum was included into the correlation matrix (
Table 12).
Throughout the surface categories, there is a strong correlation between mean runoff volume and eroded sediment sum. There is only one exception, unfortified road surfaces. Here, lacking fortification and bare surfaces condition high erosion rates, irrespective of the amount of superficially flowing water. There is also a strong correlation between vegetation cover and sediment yield that tends to be less distinctive with decreasing anthropogenic disturbance. On undisturbed sites, there is still a negative correlation (−0.101), but it is only a fraction of the correlation observed on fortified road surfaces (−0.949).
Studies investigating soil erosion on forest roads and skid trails concordantly state, that the vegetation cover is one of the most important control factors for soil erosion processes. There are numerous studies showing that erosion rates increase significantly with the absence of ground covering vegetation or an artificially applied mulch cover [
30,
35,
40,
64,
65,
66,
71,
72]. These findings were also confirmed during the presented rainfall simulations. As described, the only exception to this rule is mainly uncompacted sites, were the high infiltration rates impede runoff generation. Thus, no eroding or transporting agent was present, limiting erosion processes only to splash effects.
Regarding the quantities of eroded sediment, [
5] again gives a reference for comparable surrounding conditions. Here, a median soil erosion of 41.1 g·m
−2 on skid trails and 0.3–0.4 g·m
−2 on undisturbed sites is stated, indicating up to 10 times higher erosion rates on skid trails. Converted, the findings presented in this study, show a median of 20.02 g·m
−2 on rutted skid trails and 4.64 g·m
−2 on undisturbed sites. Given the fact, that the runoff volumes on skid trails presented in [
5] were higher than in this study, it seems plausible that the erosion rates are also higher. Nevertheless, there is still a comparable pattern when comparing skid trail surfaces and undisturbed sites, as both studies show a clear increase of soil erosion rates on skid trails. Forest roads were not included in [
5]; concerning this study at hand, they featured a median of 96.05 g·m
−2 (fortified) and 263.51 g·m
−2 (unfortified), showing distinctly higher values than skid trails presented in [
5].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}