Abstract
Background: Saudi Arabia is a leading country endorsing a sustainable future, from policymaking and investment to infrastructure development. One of the rising concerns in Saudi Arabia's Vision 2030 is solid waste management, especially in Makkah. The Solid Waste Collection Problem (SWCP) refers to the route optimisation of waste collection trucks visiting containers across various locations. Manually generated routes might contain some mistakes, and constructing and revising designed solutions can take a long time. Thus, there is a need to find optimal and fast solutions to this problem. Solving this problem demands tackling numerous routing constraints while aiming to minimise the operational cost. Since solid waste has a significant impact on the environment, reducing fuel consumption must be an objective. Methods: Thus, a mixed-integer programming model is proposed in this paper while using the time-oriented nearest neighbour heuristic. The goal is to investigate their performance on nine existing instances of SWCP in the city of Makkah. The proposed model is implemented in the Gurobi solver. The time-oriented nearest neighbour heuristic constructs the initial solution and is then re-optimised using Google OR-tools. Results: Using the greedy method to construct a solution for this problem generated better solutions when compared to the results obtained without the greedy method. Computational times are also improved by 55.7% on the problem instances. Conclusions: The findings confirm the competitive performance of the proposed method in terms of computational times and solution quality.
1. Introduction
A modest but steady rise in global temperatures increases climate change risk. One of the main causes of climate change is the increase in greenhouse gas emissions, such as carbon dioxide, methane, chlorofluorocarbons, and nitrous oxide. Even though Saudi Arabia is one of the primary producers of oil, the Kingdom of Saudi Arabia is aware of its responsibility to play a critical role in reducing the adverse effects of climate change [1]. As described in Saudi Arabia’s Vision 2030, the country is committed to a sustainable future, which is why it is at the centre of everything it does, from policymaking and investment to infrastructure development. Saudi Arabia’s Vision 2030 lists a number of initiatives and centres to meet its sustainability goals, including the formation of the national renewable energy programme, the Saudi investment recycling company, and the national environmental strategy and centres [2].
Recent concerns over the management of solid waste have arisen due to its increasing significance in the United Nations’ sustainable development goals (SDGs) [3]. Accumulated solid waste has a significant impact on the environment, the economy, and human health and well-being [4,5]. The primary influence is on the environment, where the confluence of solid waste contributes to the emission of GHGs, and the cost of managing the solid waste is always high, as it needs financial, human, and technological resources to be handled [5,6]. Transport contributes approximately 27% of the OECD’s total carbon dioxide emissions [7]. Around 80% of all transportation in the OECD countries is generated by cars. Researchers have suggested using electric vehicles to carry out the collection [8]. Others have suggested reducing the travel times during solid waste collection in order to reduce the environmental impact of the waste collection process [9].
Heuristic algorithms are designed to find feasible solutions in a faster and simpler approach compared to other optimisation techniques [10,11,12]. Hence, this paper aims to solve a mixed-integer programming model (MIP) using a time-oriented nearest neighbour heuristic to generate a feasible solution to the solid waste collection problem (SWCP). For this study, we use a set of instances from Makkah City while considering reducing fuel consumption.
The remainder of the paper is organised as follows, after the introduction. Section 2 examines related work. The problem and the instances used in this paper are defined in Section 3. The experimental tests are demonstrated, and the obtained results are discussed under Section 4. Section 5 brings the paper to a conclusion.
2. Literature Review
This paper tackles the Solid Waste Collection Problem (SWCP). The aim is to optimise the paths taken by waste collection trucks as they make their way to containers located in a variety of different geographic areas [9].
Researchers have recently focused on creating efficient solution methods for the SWCP; these methods assume maximum results with minimal work and in a short period [13]. Previous studies have considered common optimisation methods as a practical approach towards efficient waste collection, such as [14,15,16]. To clarify, the waste collection cycle involves the following steps: (i) Each vehicle starts from a depot, (ii) visits a number of containers to collect waste, (iii) unloads waste at the disposal site, and lastly (iv) returns to the depot. In these studies, most optimisation techniques tackled the waste collection route optimisation by reducing route length [17], duration [18], waste content [11], or fuel consumption [9,19].
For example, in a recent study, [14], the mixed-integer linear programming (MILP) model was designed to optimise the routes taken to collect municipal waste. Because of the route optimisation, the overall distance driven was decreased, resulting in reduced fuel consumption. Thus, solid waste collection must be transformed from fixed route planning to variable route planning in order to reflect real-world situations.
Moreover, to optimise the management of hazardous and industrial materials, the author [20] created a multi-objective mathematical model to assist decision-makers in determining the locations of treatment centres employing various technologies. The research objectives were to maximise the efficiency of managing hazardous and industrial materials.
Heuristic algorithms have proven to be efficient for routing problems [10,19,21,22]. For example, the study by [12] presented a priority-considered green vehicle routing problem (PCGVRP) model in a waste management system. A local search hybrid algorithm (LSHA) was used as a repair algorithm to find the best solution, which means that the best initial solution was found using particle swarm optimisation (PSO). Then a local search was performed on the best initial solution using a simulated annealing approach (SA). The results showed a 42.3% reduction in the adverse effect, with high waste collection and transportation efficiency. The study by [8] presented a mixed-integer programming (MIP) model for the waste collection problem (EWCP). They took into account various categories of waste, time windows, split deliveries, and waste bin–vehicle compatibility. They used an adaptive variable neighbourhood search (AVNS). The findings suggest that the AVNS as a heuristic approach obtained better results in comparison to the MIP model. Hence, there is a need for a heuristic approach to tackle SWCP.
Heuristic methods, such as constructive greedy algorithms, have been used to improve the search [22,23,24]. For example, in [25], a real-world case study of waste collection in Malaysia was studied using a Nearest Greedy algorithm to construct an initial route. They compared the results with the present vehicle routes implemented by a waste collection company within the city. The comparison suggested that the greedy algorithm performed better with an 11.07% reduction in the total distance travelled.
In the study by [10], the Capacitated Vehicle Routing Problem (CVRP) was solved using K-means and the Greedy algorithm. Their results showed that using the greedy algorithm can reduce the number of possible routes, thus requiring less time to find a solution.
Thus, this paper proposes a MIP model with a greedy approach that tackles the SWCP in Makkah while focusing on fuel consumption. The aim is to minimise the total travelling time by reducing the waste load on a route.
3. Problem Description
The SWCP is a challenging task that can be found in any country in the world [14]. Nevertheless, this problem is critical for cities in metropolitan regions and those hosting large-scale events in sports, entertainment, or religious events, such as the Holy City of Makkah, Saudi Arabia [26]. Makkah is a bustling place since it hosts the annual pilgrimage to sacred sites, i.e., the hajj. Numerous pilgrims also visit the city annually to make the minor pilgrimage, i.e., Umrah, and visit places of religious significance in or around Makkah. It is estimated that during religious events, the average quantity of waste a pilgrim generates is approximately three kilogrammes per person [26]. Additionally, the city has an inhibiting population of 8,557,766 million residents [27]. This indicates that a significant amount of solid waste is produced daily and must be removed.
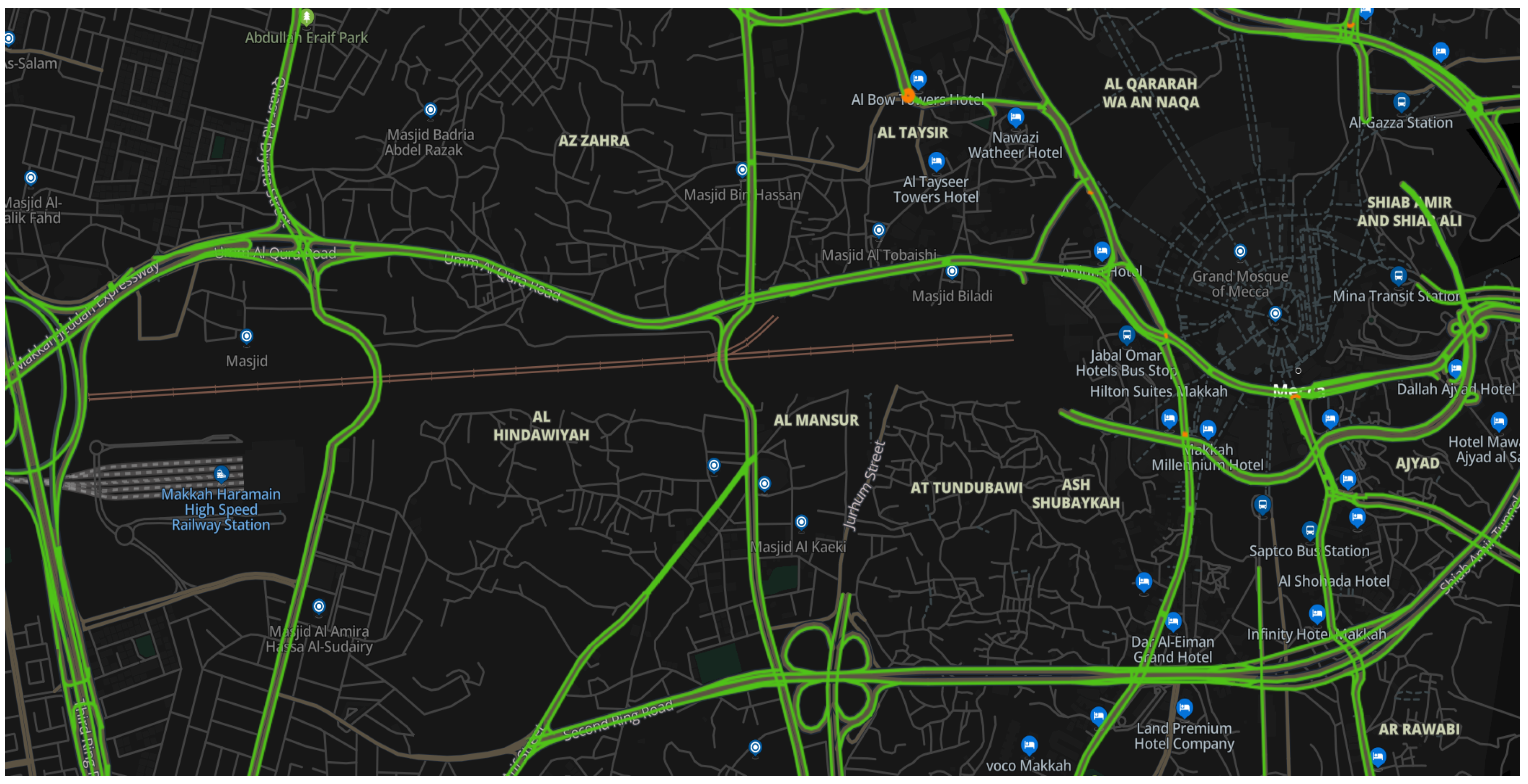
During hajj time, many road closures occur. More consideration must be taken, especially in the city’s historical district, where the streets are crowded with pedestrians, cars, and buses. Figure 1 shows a 2D satellite view of Makkah’s roads and the surrounding areas of the grand mosque (Alharm Almaki) in Makkah, taken by Google Maps during peak times. As seen from Figure 1, streets surrounding Alharm Almaki are often very narrow, making it difficult for municipal vehicles to manoeuvre around. This can be challenging, especially when the waste collection process must be fast due to the amount of waste in these areas. Hence, finding an optimal route for the SWCP is critical.
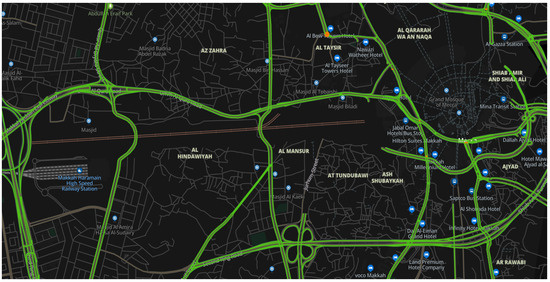
Figure 1.
A 2D satellite view of the surrounding areas of Makkah’s roads and the surrounding areas of the masjid al-haram (Grand Mosque).
Despite the previous efforts to make the religious events in Makkah more environmentally friendly and sustainable, such as [26,28], additional research is required to find the most efficient way to manage solid waste collection in Makkah [15]. Manual routing of vehicles can be inefficient, might contain some errors, and is time-consuming. Additionally, it can be challenging to calculate up-to-date fuel consumption using only manual methods. Hence, an efficient waste collection method that reduces time and fuel is an absolute necessity [14,15].
Next, the MIP model for the SWCP proposed in this study is defined. The goal is to find optimal routes for the SWCP to collect solid waste in the city of Makkah. At the same time, we are minimising the travelling time for waste collection trucks. Fuel consumption associated with these routes is also minimised.
Constraints and Objectives
The model’s notations are listed in Table 1 and explained in the following sections.

Table 1.
Notations for the SWCP model.
The SWCP is defined as a graph , where is the set of nodes and is the set of arcs.
Nodes are defined as follows. Node is the starting depot, i.e., camp, where all the waste collection trucks reside, while node is the dumping facility, i.e., dump, where the route of all trucks ends. The remaining nodes in the graph are noted as , which are the waste containers geographically scattered in Makkah, represented as a set C, where each node has one container. Therefore, \.
For each arc , there are parameters and that are introduced, where is the total distance travelled between nodes i and j and is the total travel time between nodes i and j. Note that waste collection trucks are represented as a set .
For each container , there is a positive amount of waste load measured in tonnes and time windows . Manual routes in Makkah usually go through each container in the city one by one, whether they contain waste or not. Thus, is considered constant for all containers in a deterministic setting. However, if there are different types of trucks with different sizes, the Q parameter can be revised. On the other hand, time windows are defined as to ensure waste is collected in the shortest possible time, where is the earliest possible time to visit a container i. Similarly, is the latest possible time to visit a container i. In this paper, capacity and time windows are hard constraints. Hence, they cannot be violated [29].
Each route is a sequence of nodes connected with arcs. Therefore, the solution to the SWCP is the route plan of visits, i.e., a set of waste collection trucks K assigned to visit containers C at different locations. Hence, a route plan is . Thus, a good-quality solution should have low operational costs and collect all waste while meeting current demands.
In this model, the objective function minimises the total travelling time, i.e., the cost of travel. Nevertheless, as previously stated in Section 2, many researchers have aimed to optimise SWCPs by considering the carbon footprint created during the collection process [19]. Hence, The objective function includes the total effect of the waste collection process on the environment by considering the amount of fuel consumed. At the same time, on average, trucks must carry as little load as possible to consume less fuel on their route.
The objective function is shown in Equation (1). Decision variables , are defined as binary variables. This means that if a node j is visited after node i by a waste collection truck k, then equals one; otherwise, it is zero. On the other hand, a continuous variable is introduced, indicating the load of truck k when it arrives at container i. Parameters and are added to the objective function so that the model favours earlier visits to containers with less waste. If lower-demand containers are served first and higher-demand containers are served at later steps of the route, the truck can have a smaller average load. Hence, the cost parameters would significantly affect the final routes.
Waste collection trucks are represented as a set . Similar to the VRP presented in [30], constraint Equation (2) guarantees that exactly one waste collection truck arrives at each container. Similarly, constraint Equation (3) guarantees that there is exactly one waste collection truck that leaves a container.
Similar to CVRP presented in [31], constraints Equation (4) ensure that the maximum capacity of the waste collection trucks Q is never exceeded by the waste collection process, i.e., the container capacities. Constraints Equation (5) also ensure that the model respects the capacity, where each truck has an empty weight of and a maximum waste capacity of Q. Thus, when a waste collection truck is full, the weight is calculated as the truck weight in addition to the total waste capacity, i.e., . In this model, the truck fleet is homogenous; all vehicles have the same capacity. Thus, capacity Q is used to denote the maximum capacity of any waste collection truck. Constraints Equations (6) and (7) show that each truck should start from the starting depot, i.e., Camp and finish its route at the dumping centre, i.e., Dump.
Service time, presented as for each node i, is the amount of time it takes a waste collection truck to empty a container. This value is included in the calculations of the travel time , where is the accumulated travelling time from container i to container j in addition to the service time for both containers, respectively. Service starting time has a variable introduced for each node and a truck . These variables are bounded by the earliest and latest possible time window parameters, where . Hence, constraint Equation (8) displays the restrictions on time windows. The calculations of a container’s service time must consider the service’s starting time and the truck’s departure time from its predecessor. Here the upper bound is a sufficiently large value, usually taken as the maximum of all .
The formulation ends with the bounds on service time variables Equation (9) and the binary restrictions Equation (10) on the route decision variables. These values are given in the mathematical model as hard constraints that are not allowed to be violated.
In this paper, instances of real-world Makkah waste collection are considered, provided by Holy Makkah Municipality. However, this paper explores the efficiency of the methodology using only small instances, as larger instances are more challenging.
Following is a description of the format of problem instances, as shown in Table 2, where C is the set of containers, XCOORD-YCOORD is the corresponding location of each container, Q is the container’s capacity, is the service time required to empty a container, and and are the service time windows. Note that all constants are integers.
Table 2.
A description of the format of Makkah problem instances.
Given N nodes, node is the starting depot, where all vehicles must start and finish. At the same time, node is the dumping facility. Nodes in the set are the waste containers geographically scattered in Makkah.
Each container has coordinates that are formed as an x-coordinate, which is the latitude position, and a y-coordinate, which is the longitude position. Hence, this paper calculated a distance matrix between each container i and j. As this matrix is asymmetric, distances are calculated in kilometres between two containers. Since the distance matrix calculates a straight line for geographic points, the earth’s curvature is considered to tackle real-world instances.
On the other hand, service time, i.e., the time duration in which a waste collection truck empties a container, is presented as for each node i. This value is bound to the earliest and latest possible service time parameters, namely , where is the earliest time service may start at a given depot. is the latest time service may start at a given depot. In these cases, there are three shift options: 4:00:00 a.m.–12:00:00 p.m., 7:00:00 a.m.–15:00:00 p.m., and 16:00:00 p.m.–23:59:00 p.m.
Demand is presented as . However, the demand values for nodes in these instances are currently unknown. Thus, weights for each container were randomly generated values , assigned to mimic the nature of stochastic demands. All containers and trucks have the same capacity. Thus, the capacity value Q, measured in Tonnes (t), is constant for all instances, where container capacity is 20 ton average, and the capacity of trucks is 60 t on average. Thus, the maximum total weight of a waste collection truck is 80 t.
4. Computational Experiments
The implementation has been evaluated using Windows 10, a 64-bit operating system, Gurobi Solver 9.5 [32] using default settings, and Google OR-tools [33]. All algorithms are coded in C# in the MS Visual Studio environment.
Google Optimisation Tools (Google OR-tools) is an open-source, fast, and portable software suite for solving combinatorial optimisation problems. In this paper, Google OR tools are used as a method to integrate the proposed greedy algorithm solution with the Gurobi solver.
Heuristic algorithms are usually applied to routing problems due to their ability to perform in a relatively limited search space and simultaneously produce efficient solutions in limited computing time [34]. In this work, the time-oriented nearest neighbour heuristic, extended from the method proposed by Solomon [35], is applied.
The time-oriented nearest neighbour heuristic is a greedy algorithm that adds the unrouted node with a container “closest” to the depot or the last node added without violating feasibility. As can be seen from Algorithm 1, it first finds the container closest to the starting depot. In order to select the next container to visit, at each iteration, the algorithm searches for a container that is (i) not yet assigned to any truck, (ii) feasible to be assigned, or (iii) closest to the last container in the current route. The feasibility is checked concerning the container’s time window and the truck’s capacity. If a feasible container cannot be found for the current route, a new partial route is initialised by assigning the container closest to the depot. This procedure terminates when all containers are assigned to the routes.
| Algorithm 1. The time-oriented nearest neighbour heuristic |
|
Table 3 presents the results of the proposed mixed-integer programming (MIP) model using the Gurobi solver with and without the time-oriented nearest neighbour heuristic on six different instances. For each problem instance, the table shows the number of vehicles, noted as # Veh, number of containers, noted as #Cont., lower bounds, noted as LB, the total distance, noted as Distance, the total travelling time, noted as Time, the cumulative vehicle, noted as Veh. Load, solution quality, noted as Obj, the computational time in seconds, noted as Cpt, in which the best solution was found or the termination conditions were enforced, and the gap to the optimal. Since the search was computationally expensive, an acceptable gap for termination was set to % 10 away from the best solution. Another termination condition was enforced to lower the computational time according to the time limit. The best solutions are highlighted in Bold.
Table 3.
Solutions obtained using no greedy (first table) VS. solutions obtained using the time-oriented nearest neighbor heuristic (second table) with the MIP model.
There were no violations on any problem instances, and all vehicles collected all waste in the containers. Hence, the proposed method obtained feasible solutions for all instances. Optimal solutions were found with the time-oriented nearest neighbour heuristic for all cases except when using 15 trucks and 50 containers. Still, a feasible solution was found within an acceptable amount of time.
A closer inspection of the results indicated that the values of the travel time for all instances were close to the values of the distance travelled. Hence, minimising the travelling time could reduce the overall travel cost. On the other hand, increased objective values were related to the size of the problem. Hence, the larger the problem, the more challenging it is to find an optimal solution. The quality of the results was affected to a small extent when the number of containers increased. This has a significant effect on computational time. Nevertheless, the computational time needed to solve each case remains reasonable and low, given the problem size.
Computational times were improved using a greedy heuristic in the case where five waste collection trucks were used on ten containers. However, when more containers were added, computational times without using the greedy heuristic increased. This is because later nodes have higher load values. Therefore, the model aimed to collect lighter nodes first and heavier nodes later to minimise the total travel weight contribution. Hence, several nodes are ignored during the execution and have to be inserted at a high cost at the end.
In conclusion, computational experiments indicated that the results were efficient and were obtained in real time. Nevertheless, feasibility and speed were critical factors when trying to implement the model on larger instances, even with the greedy algorithm. Hence, the model can be examined for further experimentation as our next research step.
5. Conclusions
Regarding promoting a sustainable future, Saudi Arabia is one of the world’s most progressive countries, both in terms of the policies it creates and the investments it makes, as well as the infrastructure it builds. One of the most pressing issues in Saudi Arabia’s Vision 2030 is the efficient method of waste disposal, particularly in the city of Makkah. Environmental, economic, and personal well-being are negatively impacted by the amount of waste generated. Hence, sustainable waste management is crucial to lowering GHG emissions and mitigating climate change’s adverse side effects. This leads to Saudi Arabia’s rising concern about improving the solid waste collection methods in Saudi cities, with particular emphasis on the holy city of Makkah.
This research proposes a mathematical MIP optimisation model to solve the Solid Waste Collection Problem (SWCP). The model tackled truck capacity, load, time availability, and route optimisation constraints. The aim was to minimise travel time and fuel consumption according to the distance travelled. The proposed model has been implemented and tested on real-world instances from the city of Makkah of various sizes.
The time-oriented nearest neighbour heuristic was used as a greedy algorithm to assess the proposed model for small-scale problems. Computational results showed that optimal and feasible solutions were found in a reasonable amount of time. Hence, the algorithm significantly improved the route construction process. However, obtaining solutions using a commercial IP solver to address larger problem instances was challenging. Thus, more established heuristics must be used to tackle larger-scale SWCP situations. This study can be extended in several directions that include, but are not limited to, the following:
- Investigating different constructive heuristics to better understand how we can employ metaheuristics more effectively to tackle SWCPs [36].
- Hybridising metaheuristic methods with a greedy algorithm can be a search direction to tackle this problem. In [22,23,24,25], heuristic methods were hybridised with a greedy algorithm, proving the importance of using a hybrid method to improve the search capability.
- Problem-specific information must be used in the initialisation heuristic to generate initial solutions with a high level of quality and diversity, as presented by [37,38]. Also, a problem-specific hybrid metaheuristic solution algorithm can be developed as a solution strategy.
- There could be consideration of more realistic versions of these problem scenarios, such as considering different waste types, container load levels, or various truck capacities.
Author Contributions
Conceptualization, H.A. and G.T.A.; methodology, H.A.; software, H.A.; validation, H.A. and G.T.A.; formal analysis, H.A.; investigation, H.A. and G.T.A.; resources, H.A. and G.T.A.; data curation, H.A. and G.T.A.; writing—original draft preparation, H.A. and G.T.A.; writing—review and editing, H.A. and G.T.A.; visualization, H.A.; supervision, H.A.; project administration, H.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
The authors extend their appreciation to Holy Makkah Municipality for assistance and support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Saudi and Middle East Green Initiatives. Available online: https://www.saudigreeninitiative.org/ (accessed on 31 January 2022).
- A Sustainable Saudi Vision. Vision 2030. Available online: https://www.vision2030.gov.sa/v2030/a-sustainable-saudi-vision/ (accessed on 31 January 2022).
- Department of Economic and Social Affairs. Goal 7. Available online: https://sdgs.un.org/goals/goal7 (accessed on 31 January 2022).
- Vergara, S.E.; Tchobanoglous, G. Municipal solid waste and the environment: A global perspective. Annu. Rev. Environ. Resour. 2012, 37, 277–309. [Google Scholar] [CrossRef]
- Shukla, S.; Hait, S. Smart waste management practices in smart cities: Current trends and future perspectives. In Advanced Organic Waste Management; Elsevier: Amsterdam, The Netherlands, 2022; pp. 407–424. [Google Scholar]
- Karimi, N.; Ng, K.T.W.; Richter, A. Development of a regional solid waste management framework and its application to a prairie province in central Canada. Sustain. Cities Soc. 2022, 82, 103904. [Google Scholar] [CrossRef]
- Environmental Protection Agency. Available online: https://www.epa.gov/greenvehicles/fast-facts-transportation-greenhouse-gas-emissions (accessed on 31 January 2022).
- Erdem, M. Optimisation of sustainable urban recycling waste collection and routing with heterogeneous electric vehicles. Sustain. Cities Soc. 2022, 80, 103785. [Google Scholar] [CrossRef]
- Ahmad, S.; Imran; Jamil, F.; Iqbal, N.; Kim, D. Optimal route recommendation for waste carrier vehicles for efficient waste collection: A step forward towards sustainable cities. IEEE Access 2020, 8, 77875–77887. [Google Scholar] [CrossRef]
- Febria, J.; Dewi, C.; Mailoa, E. Optimization of capacitated vehicle routing problem using initial route with same size K-means and greedy algorithm for vaccines distribution. Int. J. Appl. Sci. Eng. 2021, 18, 1–9. [Google Scholar] [CrossRef]
- Dotoli, M.; Epicoco, N. A vehicle routing technique for hazardous waste collection. IFAC-PapersOnLine 2017, 50, 9694–9699. [Google Scholar] [CrossRef]
- Wu, H.; Tao, F.; Yang, B. Optimization of vehicle routing for waste collection and transportation. Int. J. Environ. Res. Public Health 2020, 17, 4963. [Google Scholar] [CrossRef]
- Lella, J.; Mandla, V.R.; Zhu, X. Solid waste collection/transport optimization and vegetation land cover estimation using Geographic Information System (GIS): A case study of a proposed smart-city. Sustain. Cities Soc. 2017, 35, 336–349. [Google Scholar] [CrossRef]
- Hannan, M.; Begum, R.; Al-Shetwi, A.Q.; Ker, P.; Al Mamun, M.; Hussain, A.; Basri, H.; Mahlia, T. Waste collection route optimisation model for linking cost saving and emission reduction to achieve sustainable development goals. Sustain. Cities Soc. 2020, 62, 102393. [Google Scholar] [CrossRef]
- Radwan, N.; Khan, N.A.; Elmanfaloty, R.A.G. Optimization of solid waste collection using RSM approach, and strategies delivering sustainable development goals (SDG’s) in Jeddah, Saudi Arabia. Sci. Rep. 2021, 11, 16612. [Google Scholar] [CrossRef]
- Hannan, M.; Lipu, M.H.; Akhtar, M.; Begum, R.; Al Mamun, M.A.; Hussain, A.; Mia, M.; Basri, H. Solid waste collection optimization objectives, constraints, modeling approaches, and their challenges toward achieving sustainable development goals. J. Clean. Prod. 2020, 277, 123557. [Google Scholar] [CrossRef]
- Islam, R.; Rahman, M.S. An ant colony optimization algorithm for waste collection vehicle routing with time windows, driver rest period and multiple disposal facilities. In Proceedings of the 2012 International Conference on Informatics, Electronics & Vision (ICIEV), Dhaka, Bangladesh, 18–19 May 2012; IEEE: Piscatway, NJ, USA, 2012; pp. 774–779. [Google Scholar]
- Agacsapan, B.; Cabuk, S.N. Determination of suitable waste transfer station areas for sustainable territories: Eskisehir case. Sustain. Cities Soc. 2020, 52, 101829. [Google Scholar] [CrossRef]
- Hannan, M.; Akhtar, M.; Begum, R.; Basri, H.; Hussain, A.; Scavino, E. Capacitated vehicle-routing problem model for scheduled solid waste collection and route optimization using PSO algorithm. Waste Manag. 2018, 71, 31–41. [Google Scholar] [CrossRef]
- Samanlioglu, F. A multi-objective mathematical model for the industrial hazardous waste location-routing problem. Eur. J. Oper. Res. 2013, 226, 332–340. [Google Scholar] [CrossRef]
- Abdullahi, H.; Reyes-Rubiano, L.; Ouelhadj, D.; Faulin, J.; Juan, A.A. Modelling and multi-criteria analysis of the sustainability dimensions for the green vehicle routing problem. Eur. J. Oper. Res. 2021, 292, 143–154. [Google Scholar] [CrossRef]
- Guloyan, G.; Aydin, R. Optimization of capacitated vehicle routing problem for recyclable solid waste collection using genetic and seed genetic algorithms hybridized with greedy algorithm. In Proceedings of the 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 14–17 December 2020; IEEE: Piscatway, NJ, USA, 2020; pp. 595–599. [Google Scholar]
- Zhao, Z.; Zhou, M.; Liu, S. Iterated greedy algorithms for flow-shop scheduling problems: A tutorial. IEEE Trans. Autom. Sci. Eng. 2021, 19, 1941–1959. [Google Scholar] [CrossRef]
- Mahendran, G.; Sathiskumar, M.; Thiruvenkadam, S.; Lakshminarasimman, L. Multi-objective unbalanced distribution network reconfiguration through hybrid heuristic algorithm. J. Electr. Eng. Technol. 2013, 8, 215–222. [Google Scholar] [CrossRef]
- Mat, N.A.; Benjamin, A.M.; Abdul-Rahman, S.; Wibowo, A. Nearest greedy for solving the waste collection vehicle routing problem: A case study. AIP Conf. Proc. 2017, 1905, 040018. [Google Scholar]
- Elgammal, I.; Alhothali, G.T. Towards Green Pilgrimage: A Framework For Action in Makkah, Saudi Arabia. Int. J. Relig. Tour. Pilgr. 2021, 9, 39–57. [Google Scholar]
- The General Authority for Statistics (GAStat). Population in Makkah Region by Gender, Age Group, and Nationality (Saudi/Non-Saudi). Available online: https://www.stats.gov.sa/en/5723 (accessed on 31 January 2022).
- Alhothali, G.T.; Mavondo, F.; Elgammal, I. Sustainability of religious travel and tourism: A profile deviation perspective. J. Islam. Mark. 2022, 14, 1551–1576. [Google Scholar] [CrossRef]
- Kallehauge, B.; Larsen, J.; Madsen, O.B.; Solomon, M.M. Vehicle Routing Problem with Time Windows; Springer: Berlin, Germany, 2005. [Google Scholar]
- Toth, P.; Vigo, D. The Vehicle Routing Problem; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Ralphs, T.K.; Kopman, L.; Pulleyblank, W.R.; Trotter, L.E. On the capacitated vehicle routing problem. Math. Program. 2003, 94, 343–359. [Google Scholar] [CrossRef]
- Gurobi Optimization. Gurobi 7.5 User’s Manual; Gurobi: Beaverton, OR, USA, 2017. [Google Scholar]
- Google. Route. Schedule. Plan. Assign. Pack. Solve. OR-Tools is Fast and Portable Software for Combinatorial Optimization. Available online: https://developers.google.com/optimization (accessed on 31 January 2022).
- Gayialis, S.P.; Tatsiopoulos, I.P. Design of an IT-driven decision support system for vehicle routing and scheduling. Eur. J. Oper. Res. 2004, 152, 382–398. [Google Scholar] [CrossRef]
- Solomon, M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Avdoshin, S.; Beresneva, E. Constructive heuristics for Capacitated Vehicle Routing Problem: A comparative study. Proc. Inst. Syst. Program. RAS 2019, 31, 145–156. [Google Scholar] [CrossRef] [PubMed]
- Pasha, J.; Nwodu, A.L.; Fathollahi-Fard, A.M.; Tian, G.; Li, Z.; Wang, H.; Dulebenets, M.A. Exact and metaheuristic algorithms for the vehicle routing problem with a factory-in-a-box in multi-objective settings. Adv. Eng. Inform. 2022, 52, 101623. [Google Scholar] [CrossRef]
- Qi, R.; Li, J.q.; Wang, J.; Jin, H.; Han, Y.y. Qmoea: A q-learning-based multiobjective evolutionary algorithm for solving time-dependent green vehicle routing problems with time windows. Inf. Sci. 2022, 608, 178–201. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).