Stabilized Time Transfer via a 1000-km Optical Fiber Link Using High-Precision Delay Compensation System

 , and
, and
Abstract
:1. Introduction
2. Operation Principle
2.1. Bidirectional Time Transfer
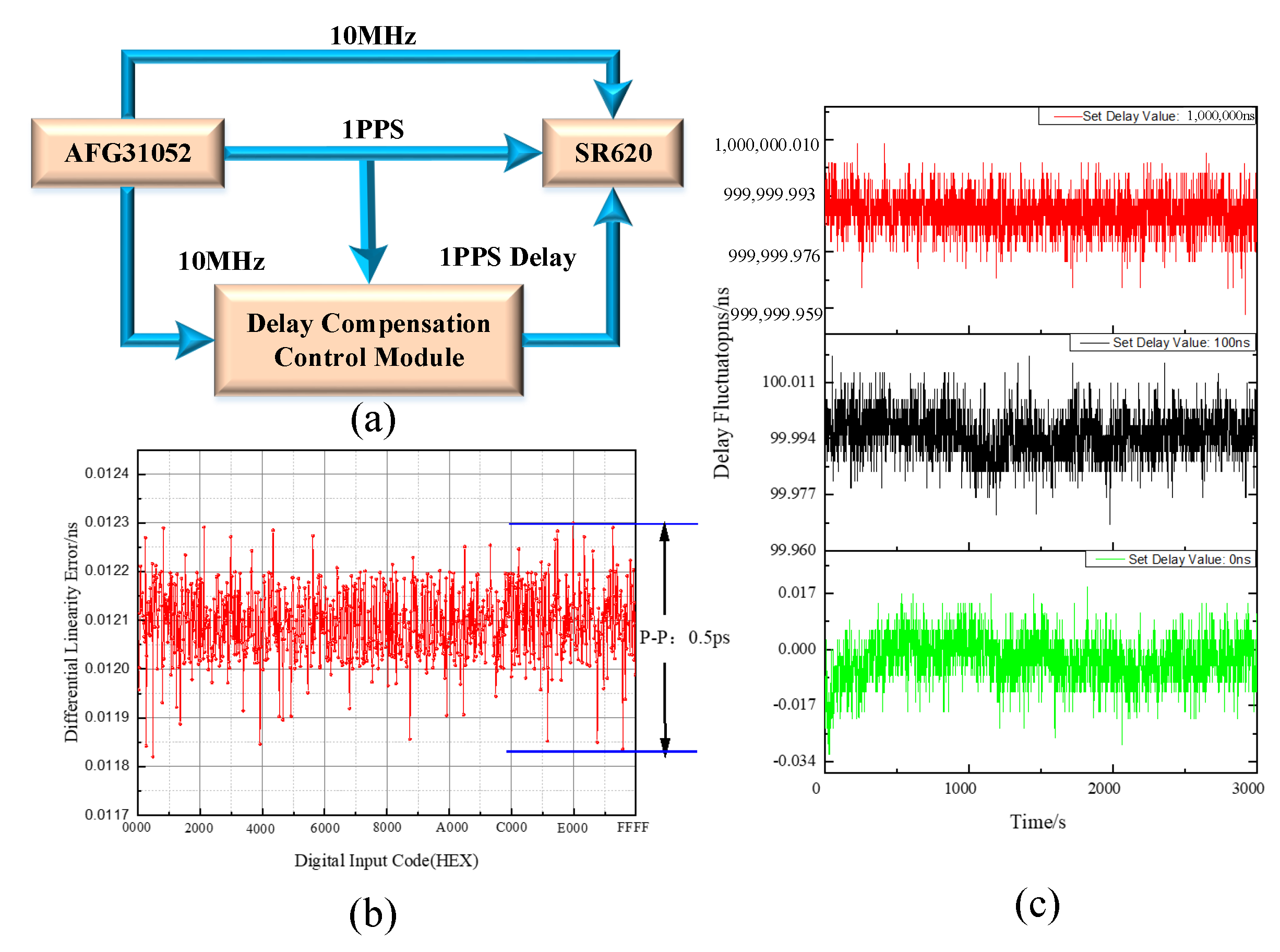
2.2. High-Precision Delay Compensation
3. Experimental Evaluation
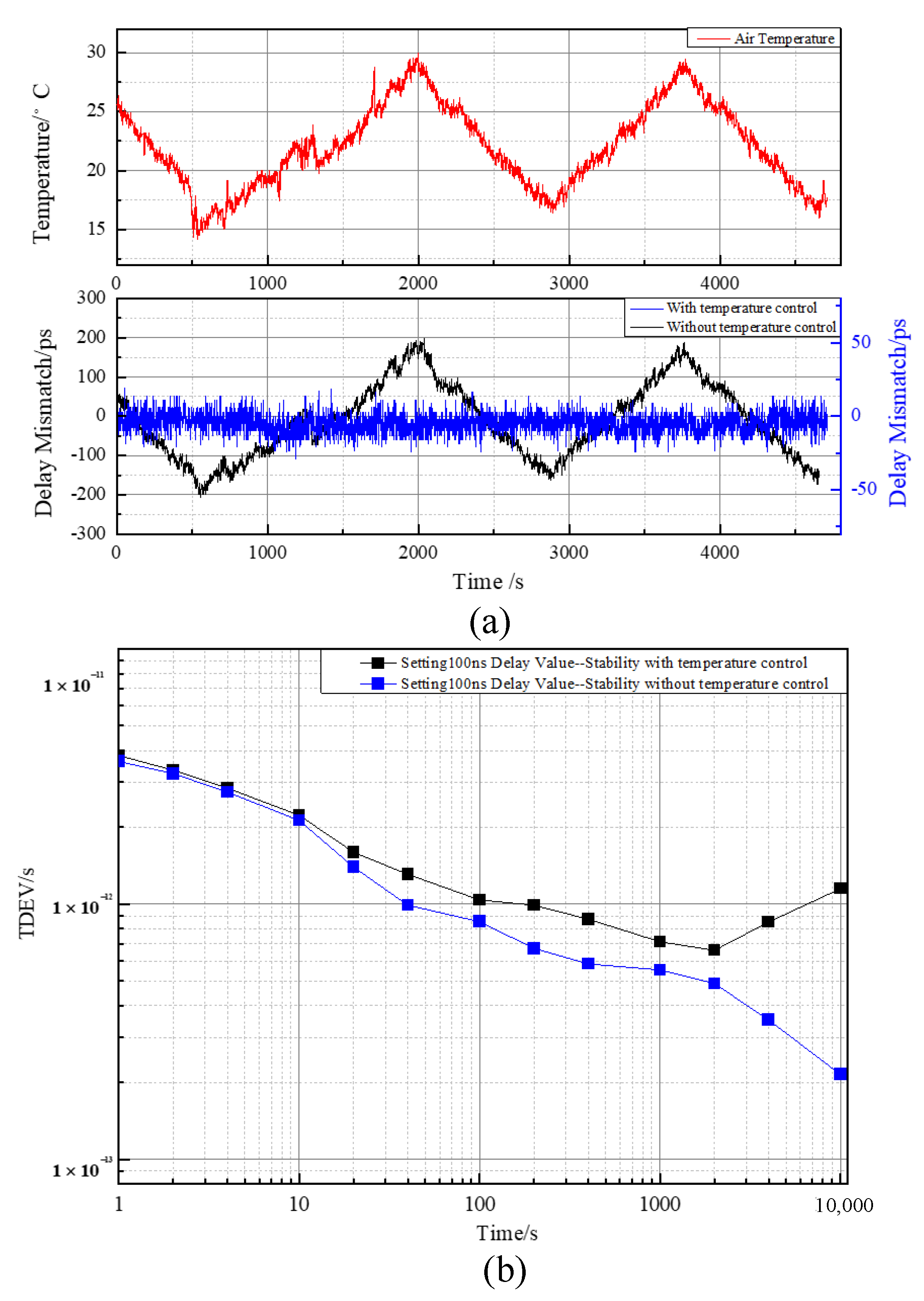
3.1. Delay Compensation Uncertainty and Stability Analysis
3.2. Bidirectional Time Transmission Analysis
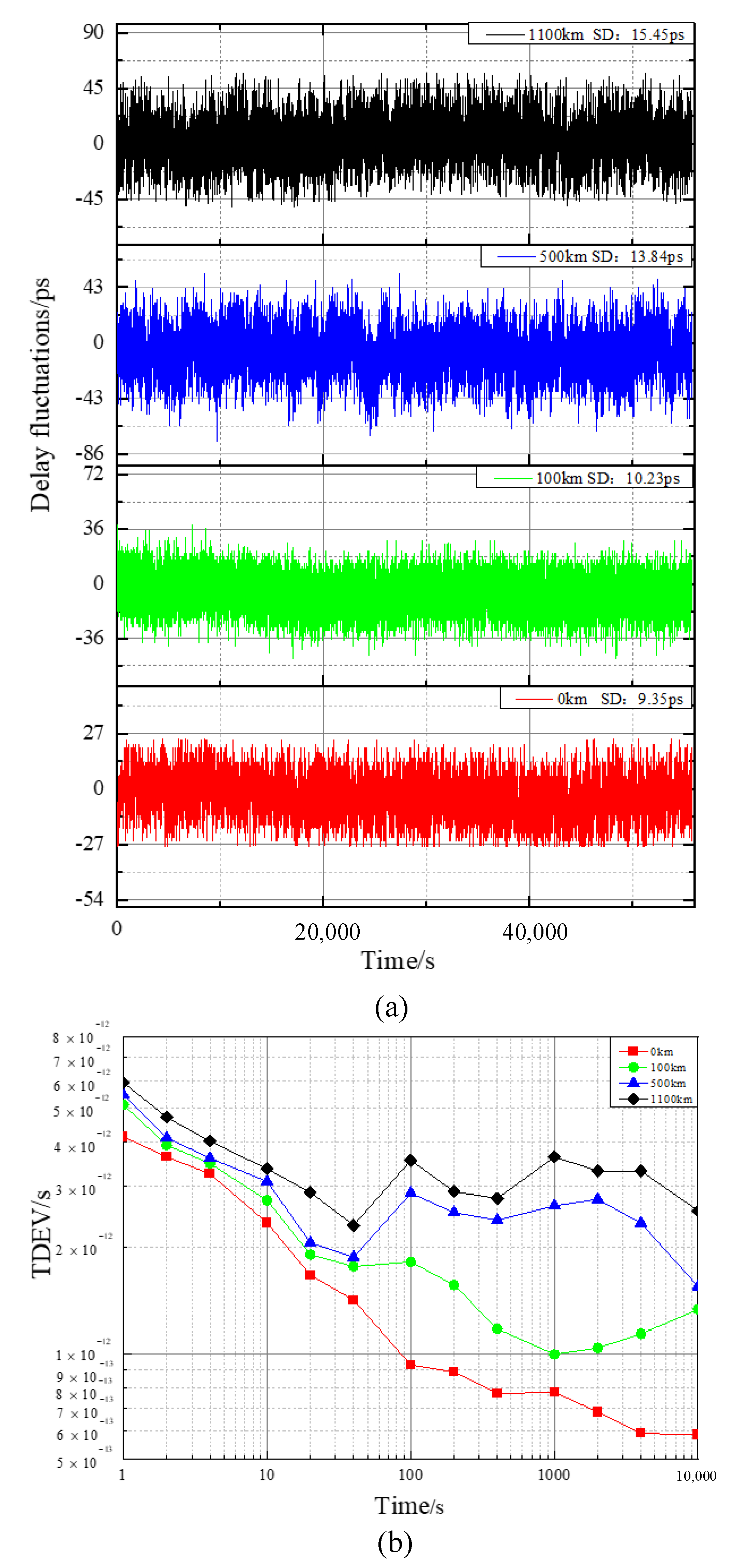
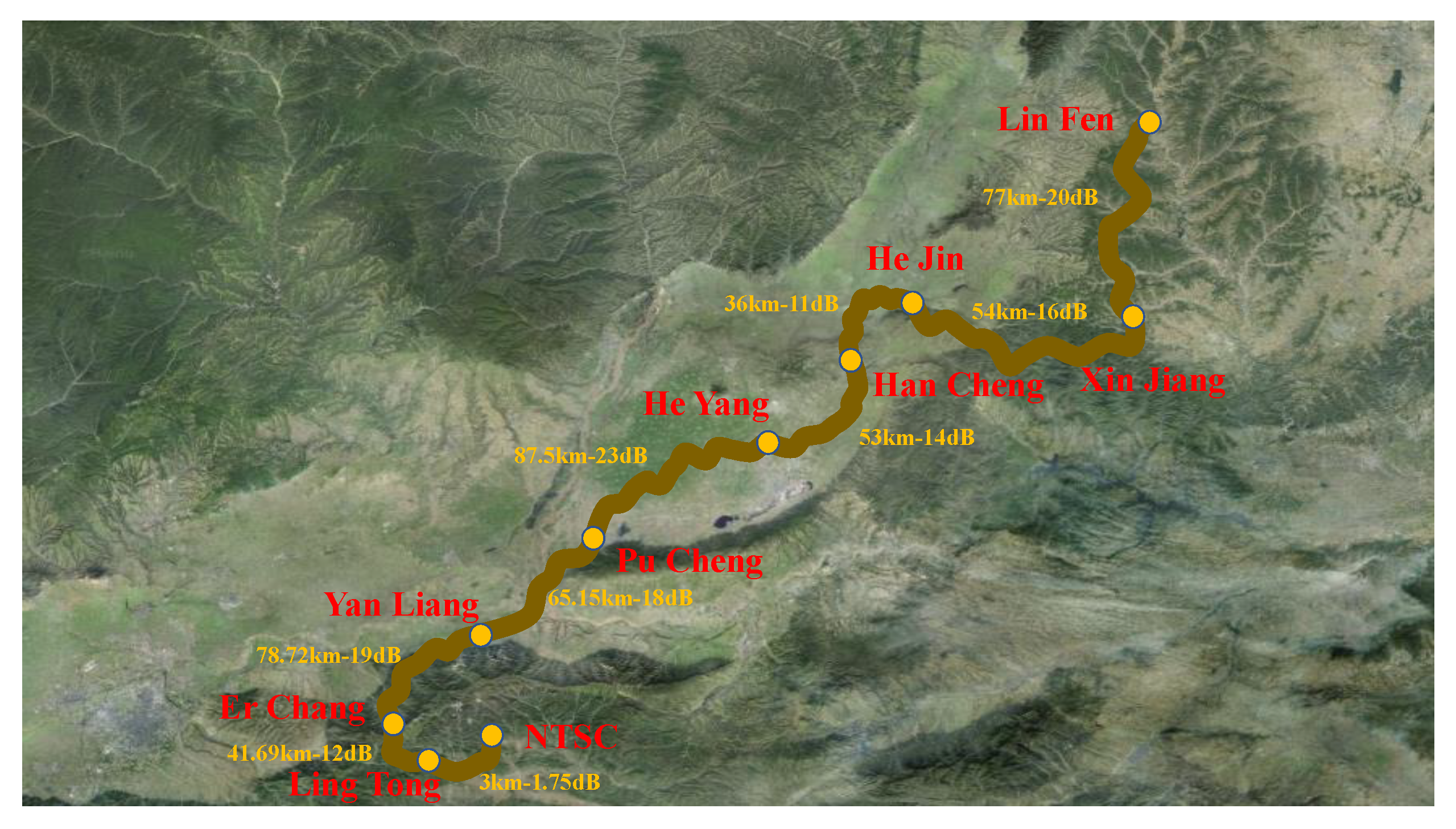
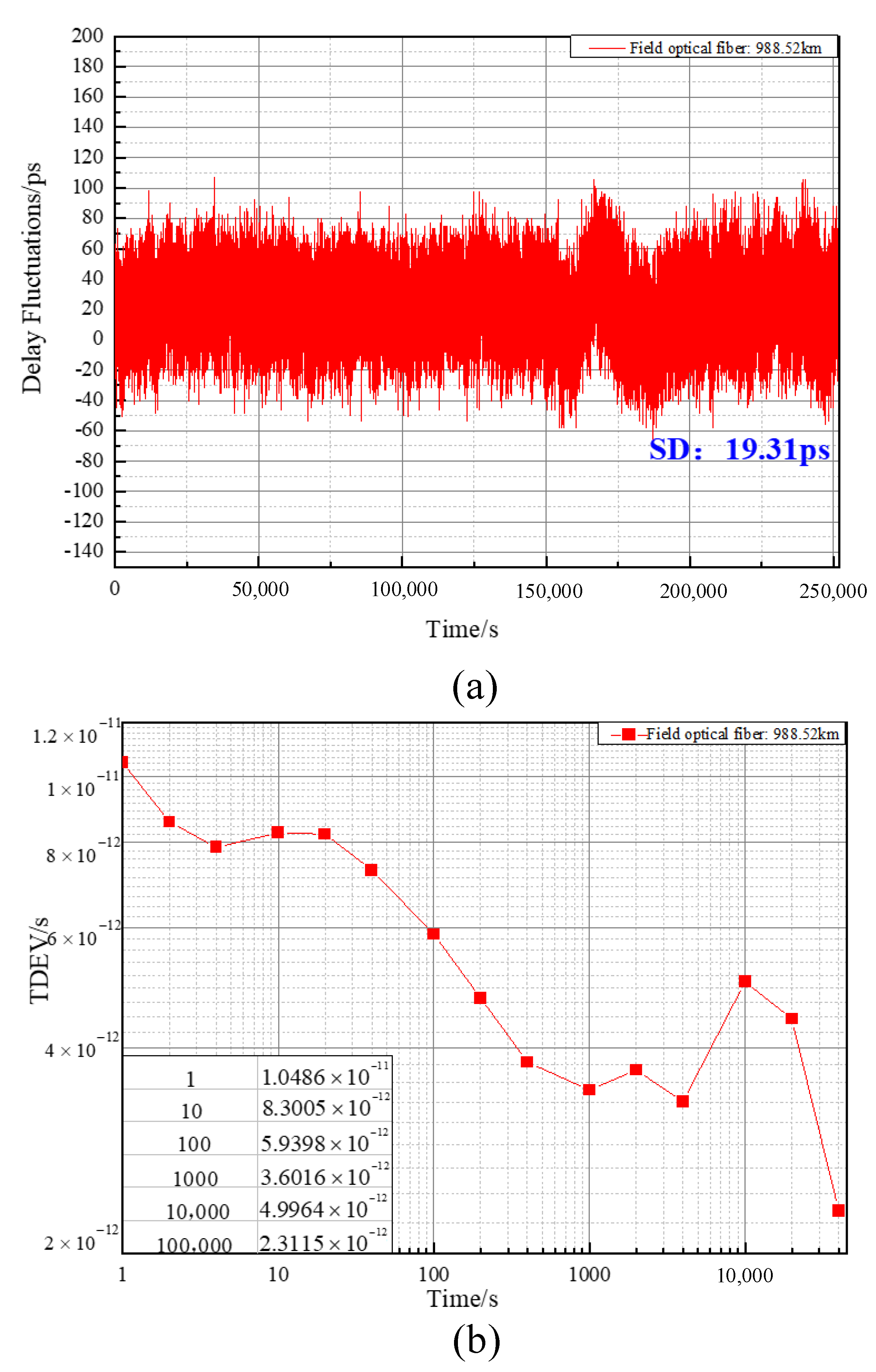
4. Field Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, L.; Poli, N.; Salvi, L.; Tino, G.M. Atom interferometry with the sr optical clock transition. Phys. Rev. Lett. 2017, 119, 263601. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kudriashov, V.; Martin-Neira, M.; Lia, E.; Jankovic, P.; Michalski, J.; Kant, P.; Trofimowicz, D. On lab test of coherence in event horizon imager. In Proceedings of the 2021 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Gainesville, FL, USA, 7–17 July 2017; pp. 1–6. [Google Scholar]
- Karlsson, A.; Jansson, M.; Holter, H. Stepped frequency pulse compression with noncoherent radar using deep learning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1657–1671. [Google Scholar] [CrossRef]
- Hedekvist, P.O.; Ebenhag, S.C. Time and frequency transfer in optical fibers. Recent Prog. Opt. Fiber Res. 2012, 21, 371–386. [Google Scholar] [CrossRef] [Green Version]
- Underhill, M. Propagation frequency shifts and impact on time and frequency transfer and gravity wave detection. In Proceedings of the 2016 IEEE International Frequency Control Symposium (IFCS), New Orleans, LA, USA, 9–12 May 2016; pp. 1–5. [Google Scholar]
- Tseng, W.-H. Comparison of gnss all-in-view (av) and upsampled common-view (ucv) time transfers. In Proceedings of the 2021 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Gainesville, FL, USA, 7–17 July 2021; pp. 1–3. [Google Scholar]
- Belli, A.; Exertier, P. Long-term behavior of the doris oscillator under radiation: The jason-2 case. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 1965–1976. [Google Scholar] [CrossRef]
- Sekido, M.; Takefuji, K.; Ujihara, H.; Kondo, T.; Tsutsumi, M.; Miyauchi, Y.; Kawai, E.; Hasegawa, Y.; Koyama, Y.; Watabe, K.; et al. Frequency transfer with new broadband vlbi.–nmij-nict test experiment–. In Proceedings of the 2019 URSI Asia-Pacific Radio Science Conference (AP-RASC), New Delhi, India, 9–15 March 2019; p. 1. [Google Scholar]
- Clivati, C.; Ambrosini, R.; Artz, T.; Bertarini, A.; Bortolotti, C.; Frittelli, M.; Levi, F.; Mura, A.; Maccaferri, G.; Nanni, M.; et al. A vlbi experiment using a remote atomic clock via a coherent fibre link. Sci. Rep. 2017, 7, 40992. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Jimenez, J.; Gutierrez-Rivas, J.L.; Marin-Lopez, E.; Rodriguez-Alvarez, M.; Diaz, J. Time as a service based on white rabbit for finance applications. IEEE Commun. Mag. 2020, 58, 60–66. [Google Scholar] [CrossRef]
- Hedekvist, P.O.; Ebenhag, S.-C.; Jaldehag, K. Active optical pre-compensation in short range frequency transfer in optical single-mode fiber. In Proceedings of the 2011 Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum (FCS) Proceedings, San Francisco, CA, USA, 2–5 May 2011; pp. 1–2. [Google Scholar]
- Liu, C.; Zhou, S.; Shang, J.; Zhao, Z.; Gao, H.; Chen, X.; Yu, S. Stabilized radio frequency transfer via 100 km urban optical fiber link using passive compensation method. IEEE Access 2019, 7, 97487–974919. [Google Scholar] [CrossRef]
- Wu, R.; Yang, F.; Sun, Y.; Wei, F.; Gui, Y.; Ding, Y.; Cai, H. Absolutely consistent fiber-optic phase synchronization based on fixed-phase-reference optical active compensation. IEEE Photonics J. 2021, 13, 1–11. [Google Scholar] [CrossRef]
- Śliwczyński, Ł.; Krehlik, P.; Buczek, Ł.; Lipiński, M. Active propagation delay stabilization for fiber-optic frequency distribution using controlled electronic delay lines. IEEE Trans. Instrum. Meas. 2011, 60, 1480–1488. [Google Scholar] [CrossRef]
- Walter, A.; Schaefer, G.S. Chromatic dispersion variations in ultra-long-haul transmission systems arising from seasonal soil temperature variations. In Optical Fiber Communication Conference and Exhibit; Optical Society of America: Washington, DC, USA, 2002; pp. 332–333. [Google Scholar]
- Hanssen, J.L.; Crane, S.G.; Ekstrom, C.R. One-way temperature compensated fiber link. In Proceedings of the 2011 Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum (FCS) Proceedings, San Francisco, CA, USA, 2–5 May 2011; pp. 1–5. [Google Scholar]
- Škoda, P.; Altmann, M.; Vojtěch, J.; Radil, J.; Smotlacha, V.; Škoda, P. Propagation delay stabilization to address fast and slow delay changes. In Proceedings of the 2016 10th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Prague, Czech Republic, 20–22 July 2016; pp. 1–4. [Google Scholar]
- Krehlik, P.; Mazur, M.; Śliwczyński, L. Delay compensation of 1 pps timetags in fiber-optic time distribution. In Proceedings of the 2017 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Besancon, France, 9–13 July 2017; pp. 366–367. [Google Scholar]
- Bogataj, L.; Tratnik, J.; Batagelj, B.; Tratnik, J.; Bogataj, L.; Dragonja, U. A highly stable oeo using a multi-purpose optical-delay stabilization system. In Proceedings of the 2017 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Besancon, France, 9–13 July 2017; pp. 486–488. [Google Scholar]
- Wang, Y.; Yu, C.; Yan, L.; Willner, A.E.; Roussev, R.; Langrock, C.; Fejer, M.M.; Sharping, J.E.; Gaeta, A.L. 44-ns continuously tunable dispersionless optical delay element using a ppln waveguide with two-pump configuration, dcf, and a dispersion compensator. IEEE Photonics Technol. Lett. 2007, 19, 861–863. [Google Scholar] [CrossRef]
- Lopez, O.; Amy-Klein, A.; Daussy, C.; Chardonnet, C.; Narbonneau, F.; Lours, M.; Santarelli, G. 86-km optical link with a resolution of 2 × 10−18 for rf frequency transfer. Eur. Phys. J. D 2008, 48, 35–41. [Google Scholar] [CrossRef] [Green Version]
- Tratnik, J.; Lemut, P.; Dragonja, U.; Batagelj, B.; Vidmar, M. Distribution of rf-clock signal over single optical fiber with temperature-drift and vibration compensation. In Proceedings of the 2013 IEEE International Topical Meeting on Microwave Photonics (MWP), Alexandria, VA, USA, 28–31 October 2013; pp. 162–165. [Google Scholar]
- Krehlik, P.; Śliwczyński, Ł.; Idzik, M. Extending the delay compensation range of the fiber optic time and frequency transfer system. In Proceedings of the 2014 European Frequency and Time Forum (EFTF), Neuchatel, Switzerland, 23–26 June 2014; pp. 346–348. [Google Scholar]
- Li, J.; Zhang, X. The design of optical fiber delay line based on optical phased array. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 2064–2067. [Google Scholar]
- Lopez, O.; Kéfélian, F.; Jiang, H.; Haboucha, A.; Bercy, A.; Stefani, F.; Chanteau, B.; Kanj, A.; Rovera, D.; Achkar, J.; et al. Frequency and time transfer for metrology and beyond using telecommunication network fibres. C. R. Phys. 2015, 16, 531–539. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Wei, W.; Liu, Z.; Han, D.; Deng, N.; Yang, L.; Xie, W.; Dong, Y. Joint frequency and time transfer over optical fiber with high-precision delay variation measurement using a phase-locked loop. IEEE Photonics J. 2019, 11, 1–8. [Google Scholar] [CrossRef]
- Buhr, S.; Kreißig, M.; Protze, F.; Ellinger, F. Subnanosecond time synchronization using a 100base-tx ethernet transceiver and an optimized pi-clock servo. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, G.; Li, X.; Chen, J. Uncertainty analysis of BTDM-SFSW based fiber-optic time transfer. Metrologia 2017, 54, 94–101. [Google Scholar] [CrossRef]
- Vladimir, B.; Bourdine, A.; Delmukhametov, O. Design of the optical fibers for differential mode delay compensation. In Proceedings of the SPIE—The International Society for Optical Engineering, San Francisco, CA, USA, 24 January 2012. [Google Scholar]
- Kodet, J.; Panek, P.; Prochazka, I. Two-way time transfer via optical fiber providing subpicosecond precision and high temperature stability. Metrologia 2016, 53, 18. [Google Scholar] [CrossRef] [Green Version]
- Śliwczyński, Ł.; Krehlik, P.; Buczek, Ł.; Schnatz, H. Picoseconds-accurate fiber-optic time transfer with relative stabilization of lasers wavelengths. J. Lightwave Technol. 2020, 38, 5056–5063. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set Delay Value (ns) | Measured Delay Value (ns) | Time Deviation After Calibration (ns) |
|---|---|---|
| 0 | 23.576 | 0 |
| 1 | 24.592 | +0.016 |
| 100 | 123.595 | +0.019 |
| 10,000 | 10,023.553 | −0.023 |
| 1,000,000 | 1,000,023.601 | +0.025 |
| 100,000,000 | 100,000,023.555 | −0.021 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Guo, X.; Kong, W.; Liu, T.; Dong, R.; Zhang, S. Stabilized Time Transfer via a 1000-km Optical Fiber Link Using High-Precision Delay Compensation System. Photonics 2022, 9, 522. https://doi.org/10.3390/photonics9080522
Liu B, Guo X, Kong W, Liu T, Dong R, Zhang S. Stabilized Time Transfer via a 1000-km Optical Fiber Link Using High-Precision Delay Compensation System. Photonics. 2022; 9(8):522. https://doi.org/10.3390/photonics9080522
Chicago/Turabian StyleLiu, Bo, Xinxing Guo, Weicheng Kong, Tao Liu, Ruifang Dong, and Shougang Zhang. 2022. "Stabilized Time Transfer via a 1000-km Optical Fiber Link Using High-Precision Delay Compensation System" Photonics 9, no. 8: 522. https://doi.org/10.3390/photonics9080522
APA StyleLiu, B., Guo, X., Kong, W., Liu, T., Dong, R., & Zhang, S. (2022). Stabilized Time Transfer via a 1000-km Optical Fiber Link Using High-Precision Delay Compensation System. Photonics, 9(8), 522. https://doi.org/10.3390/photonics9080522