Experimental Demonstration and Simulation of Bandwidth-Limited Underwater Wireless Optical Communication with MLSE

Abstract
:1. Introduction
2. Principle and Models
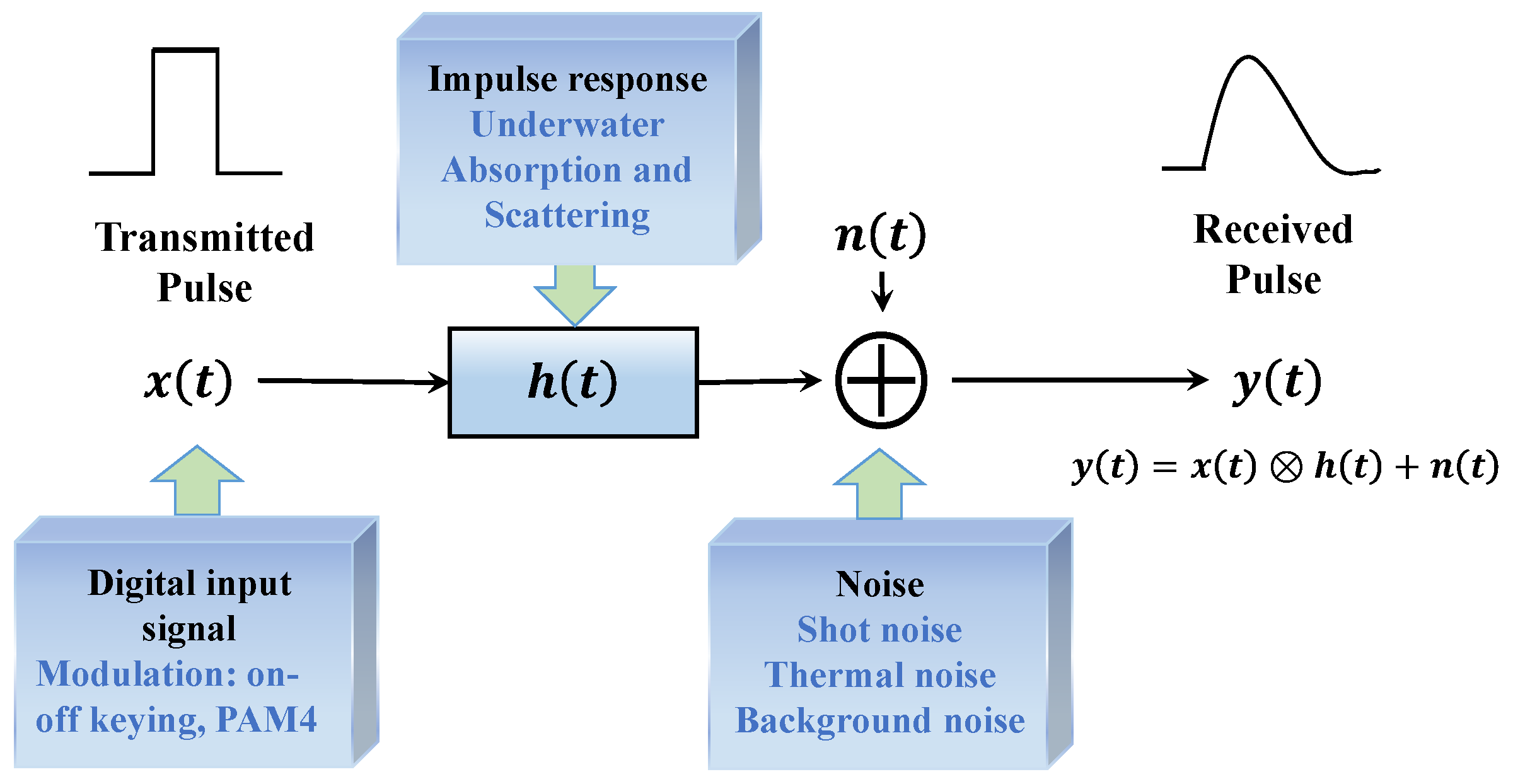
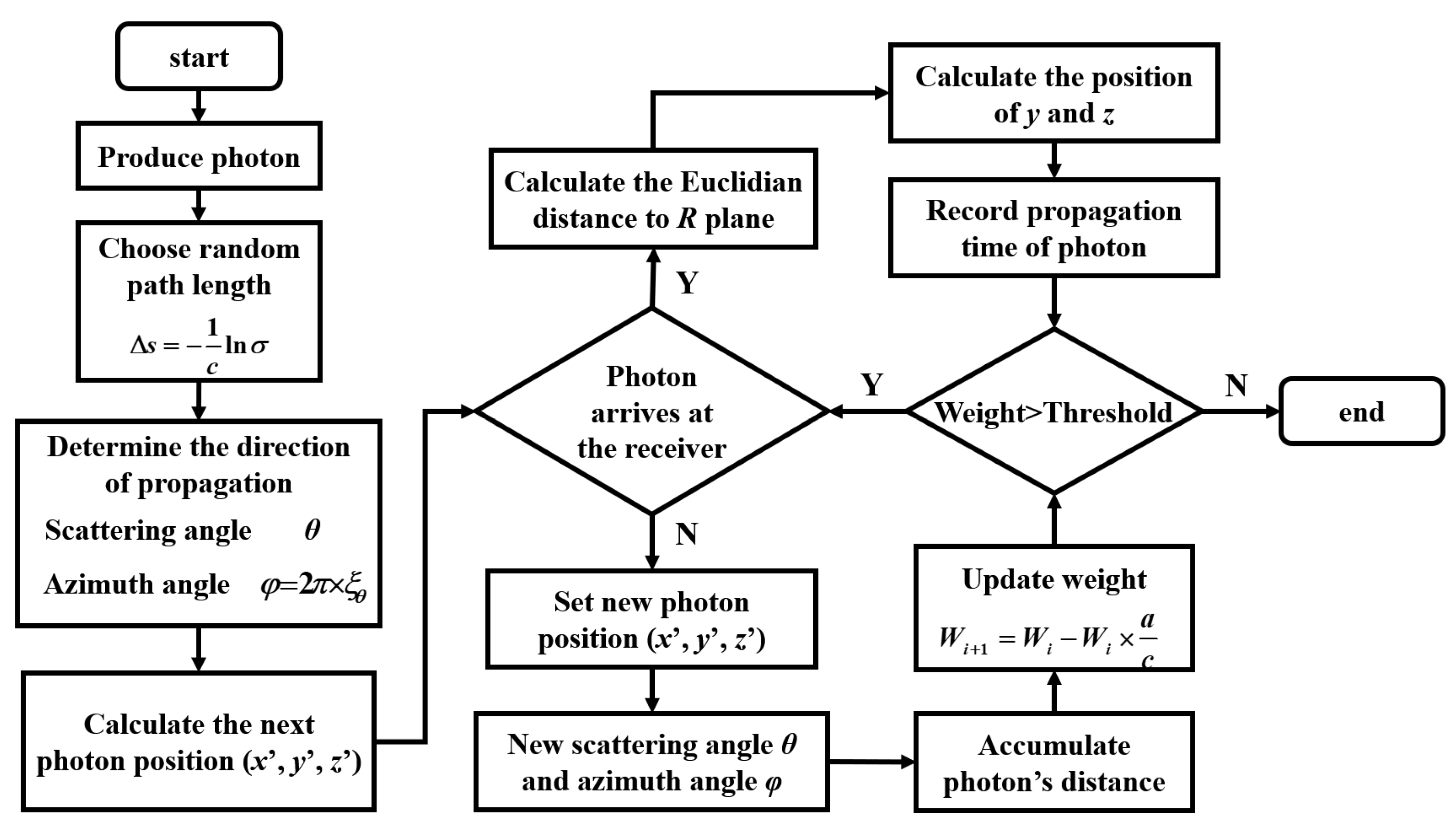
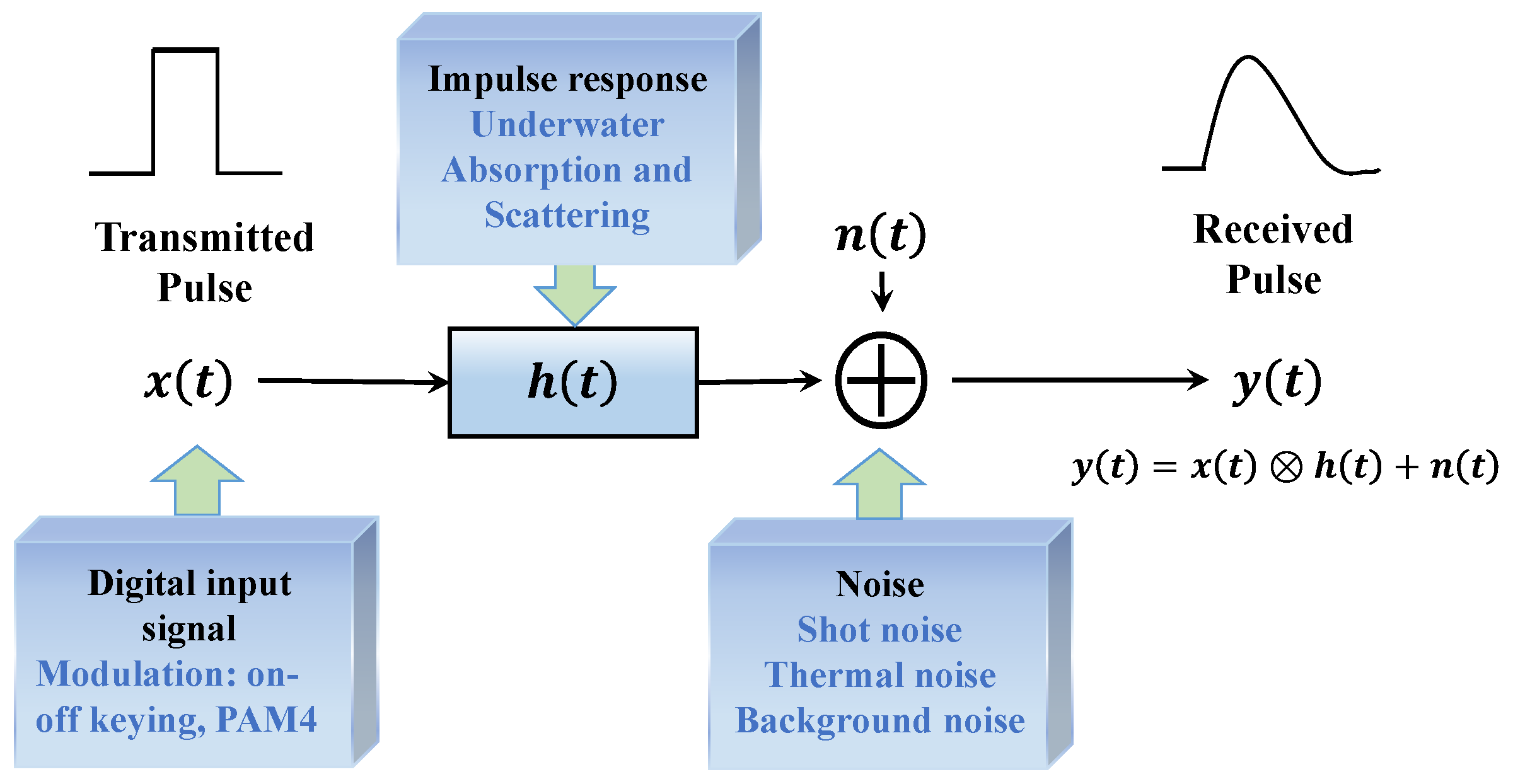
2.1. Channel Model
2.2. Volume Scattering Phase Function
2.3. MLSE Algorithm
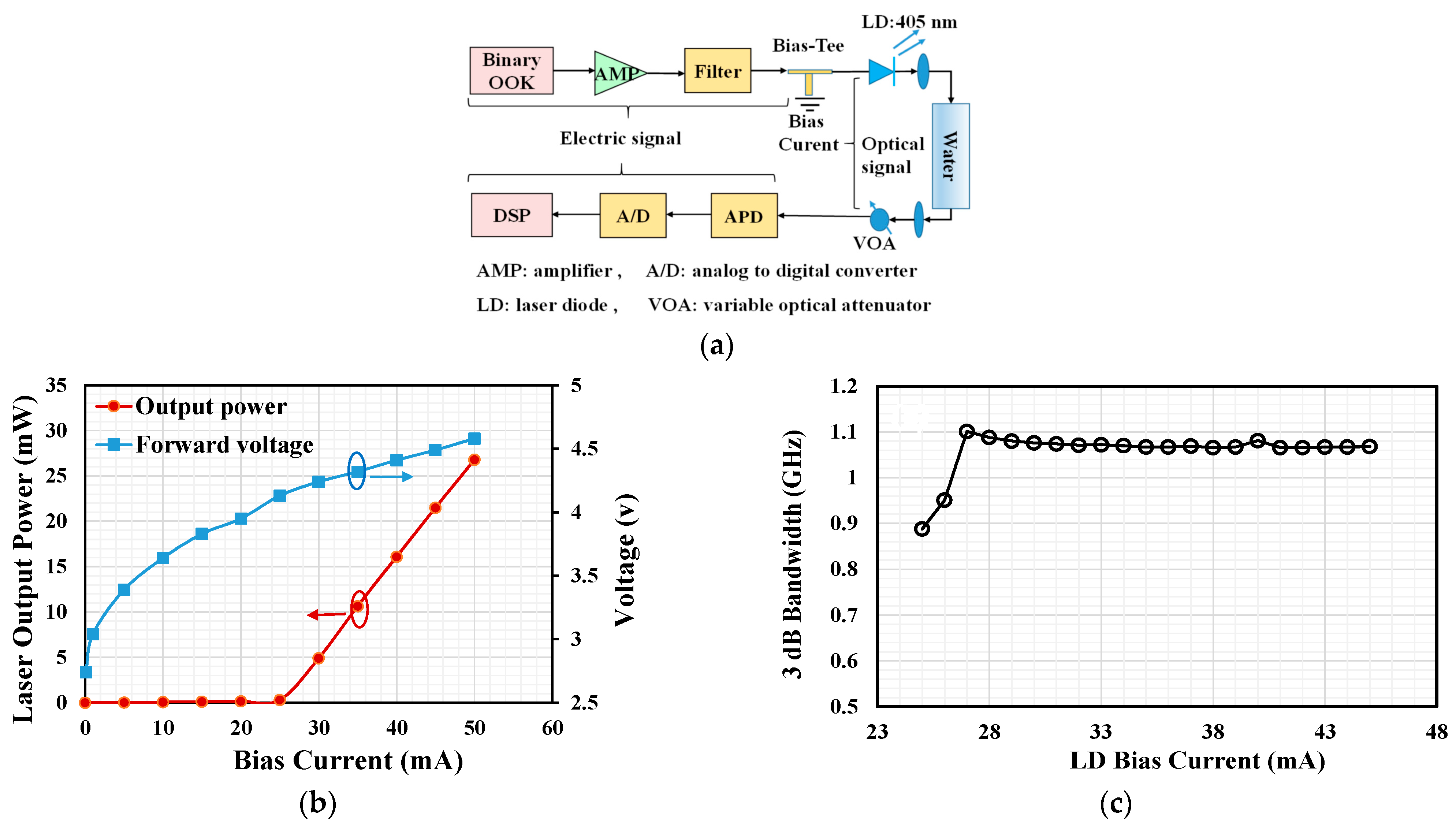
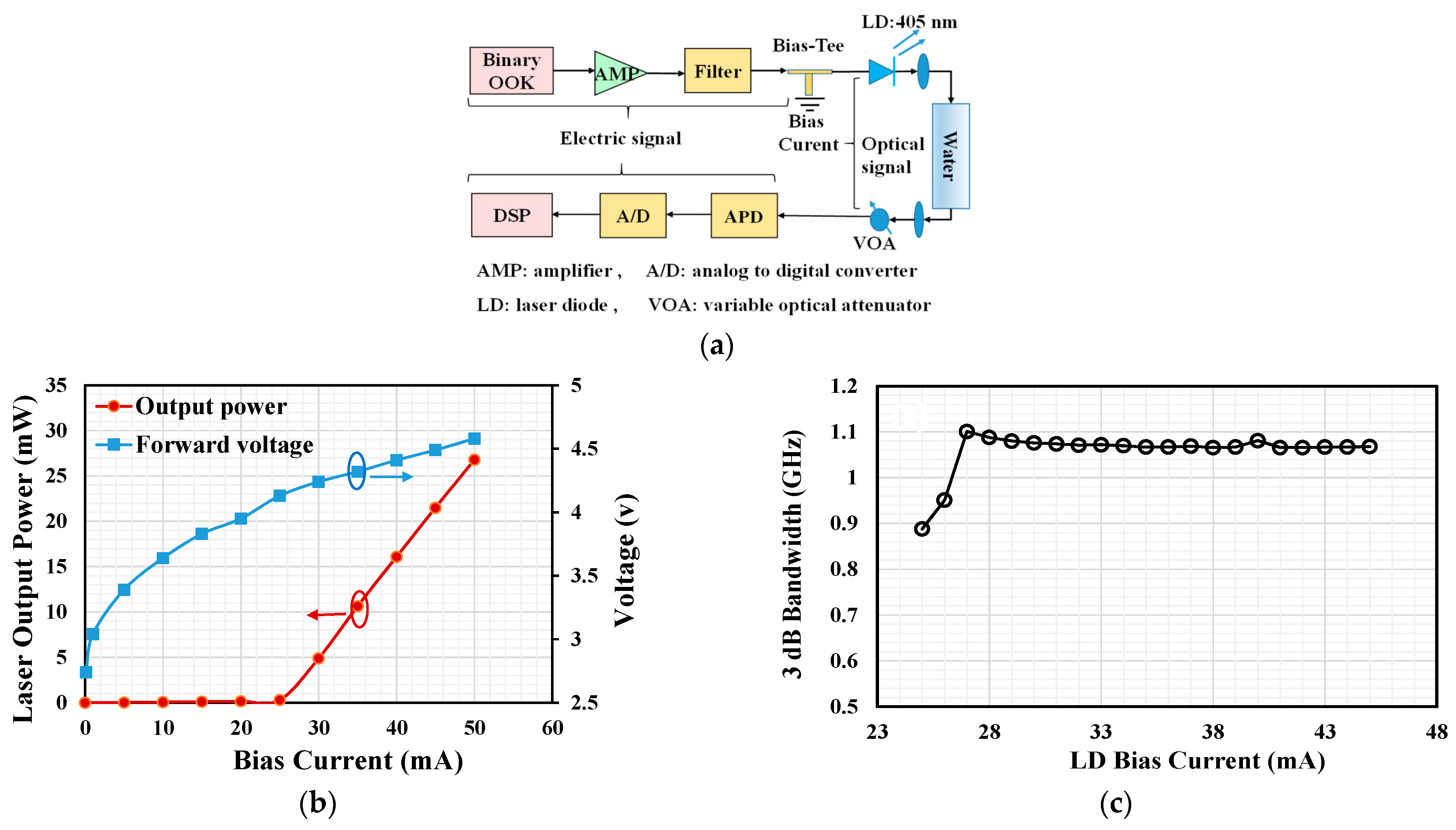
3. Experimental Setup
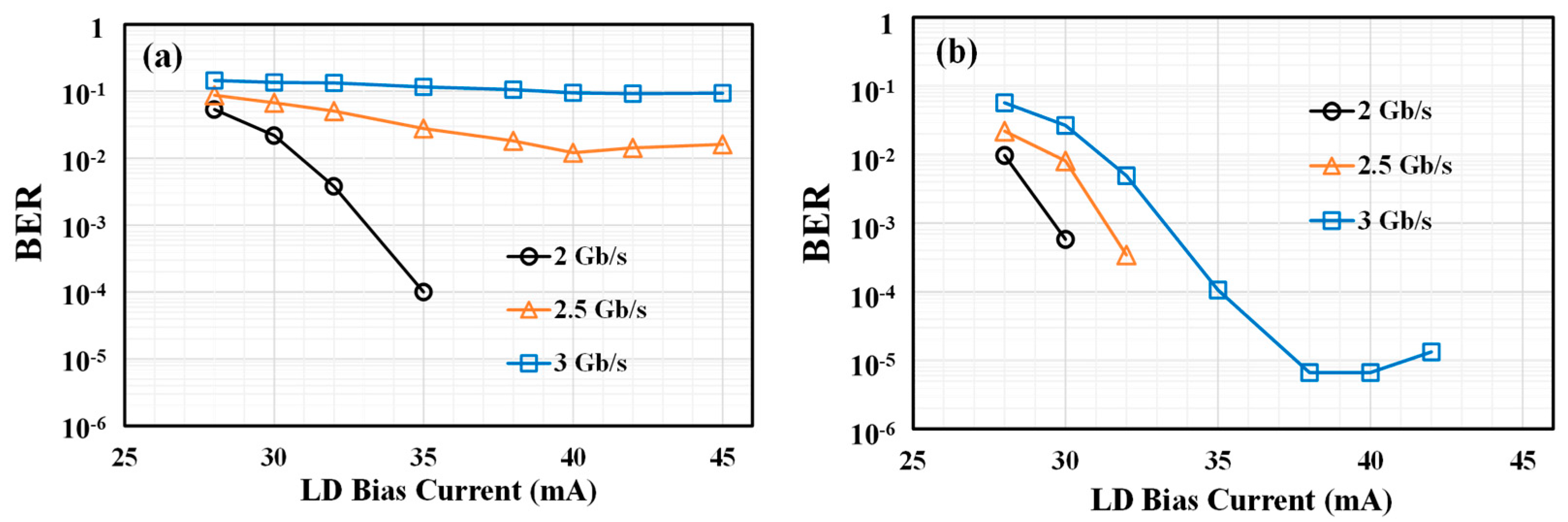
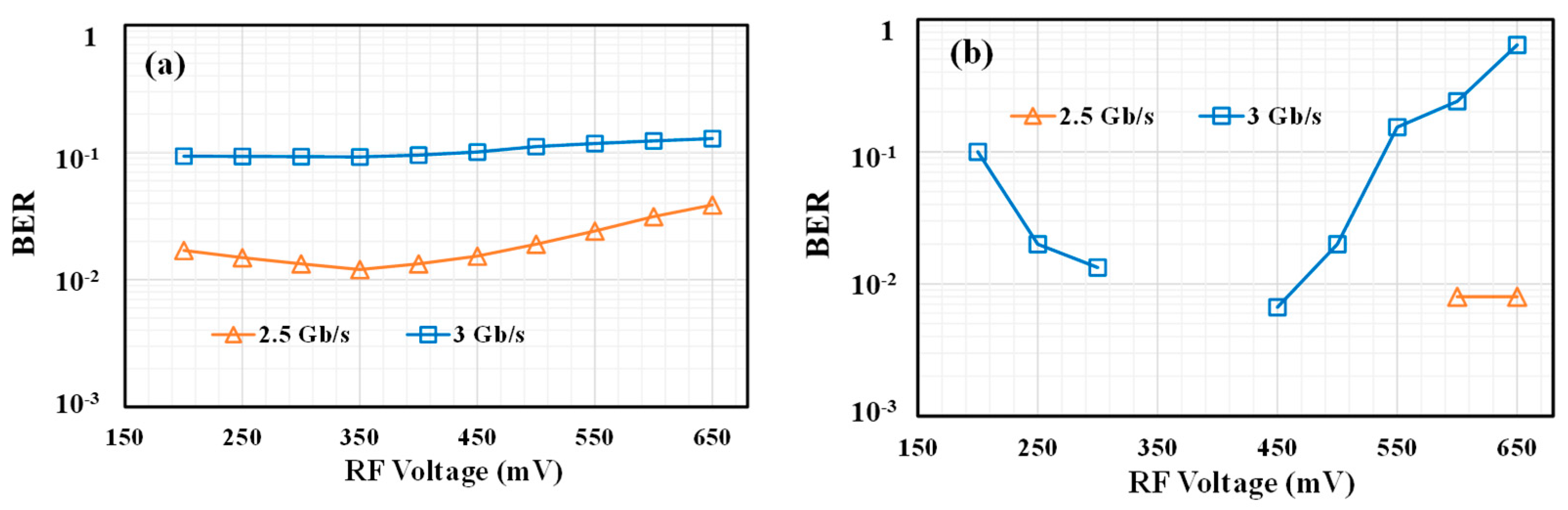
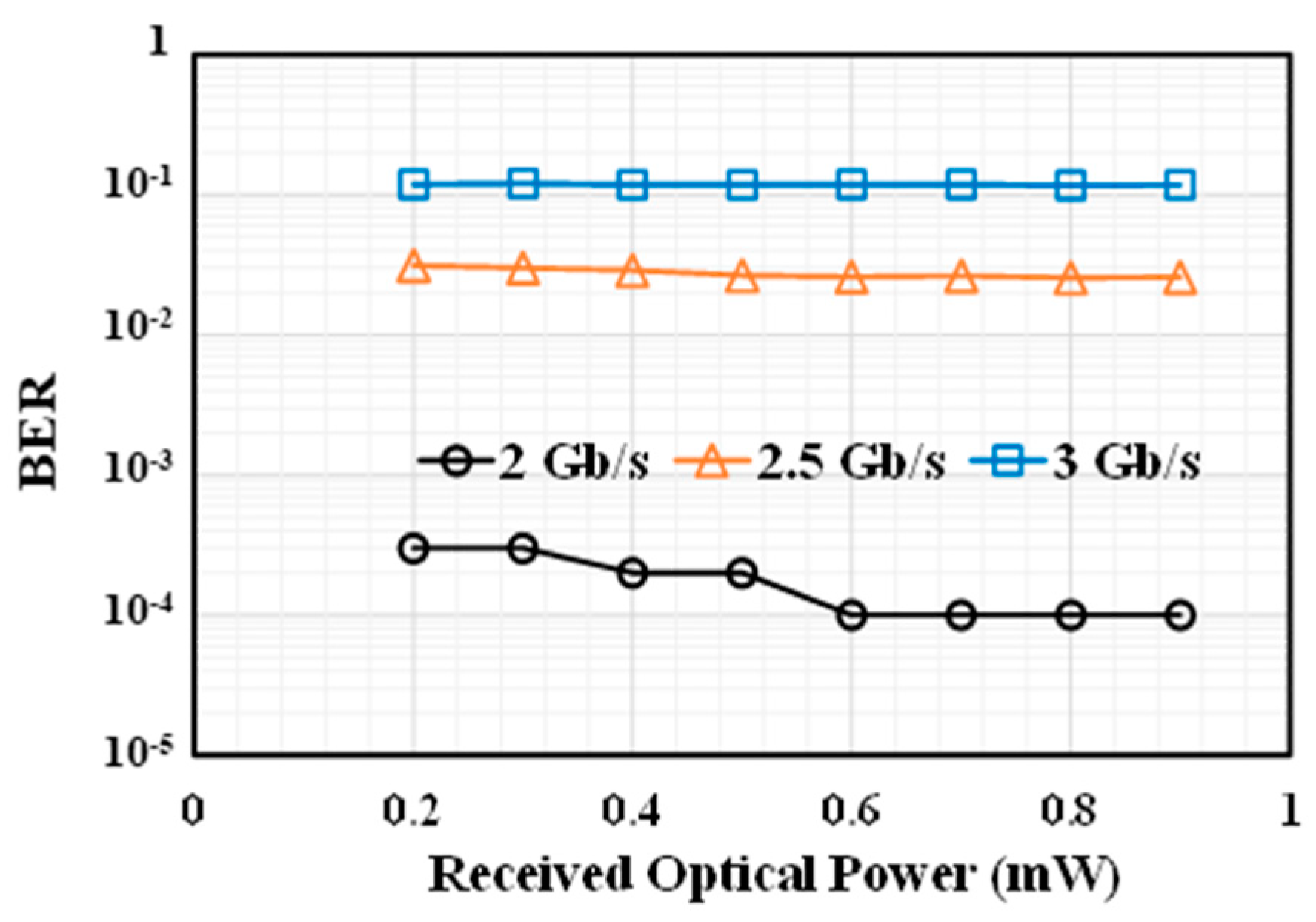
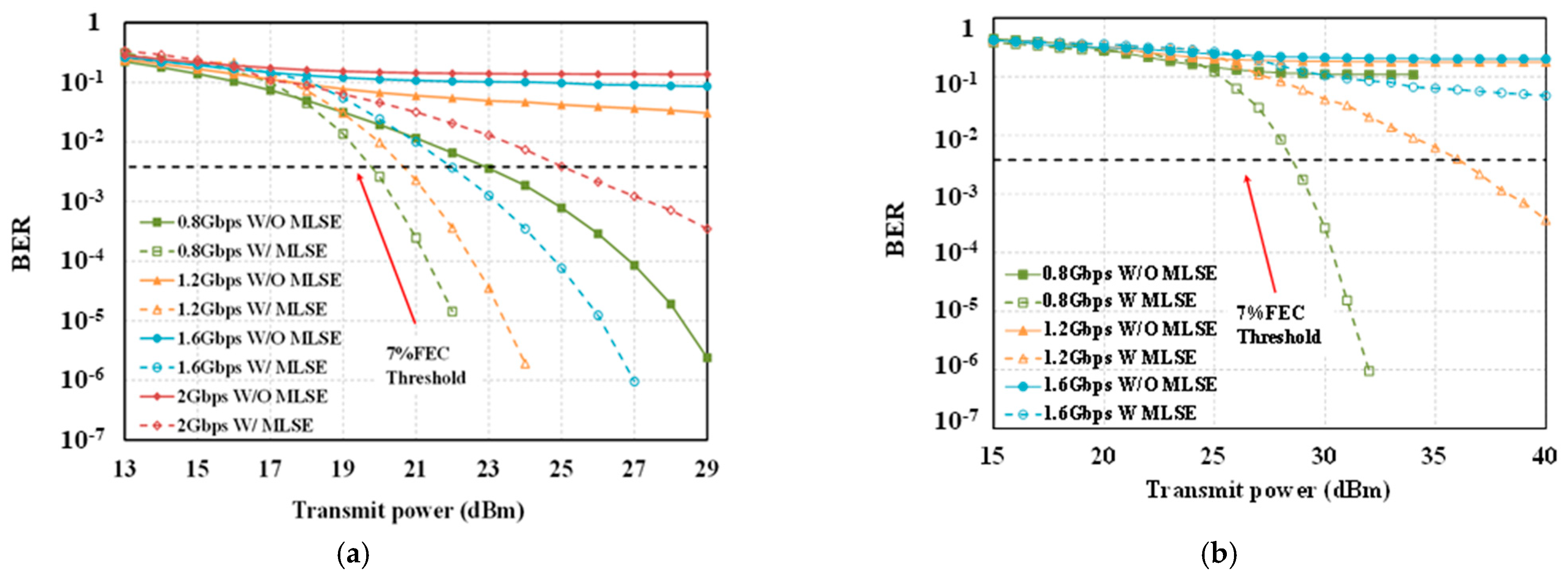
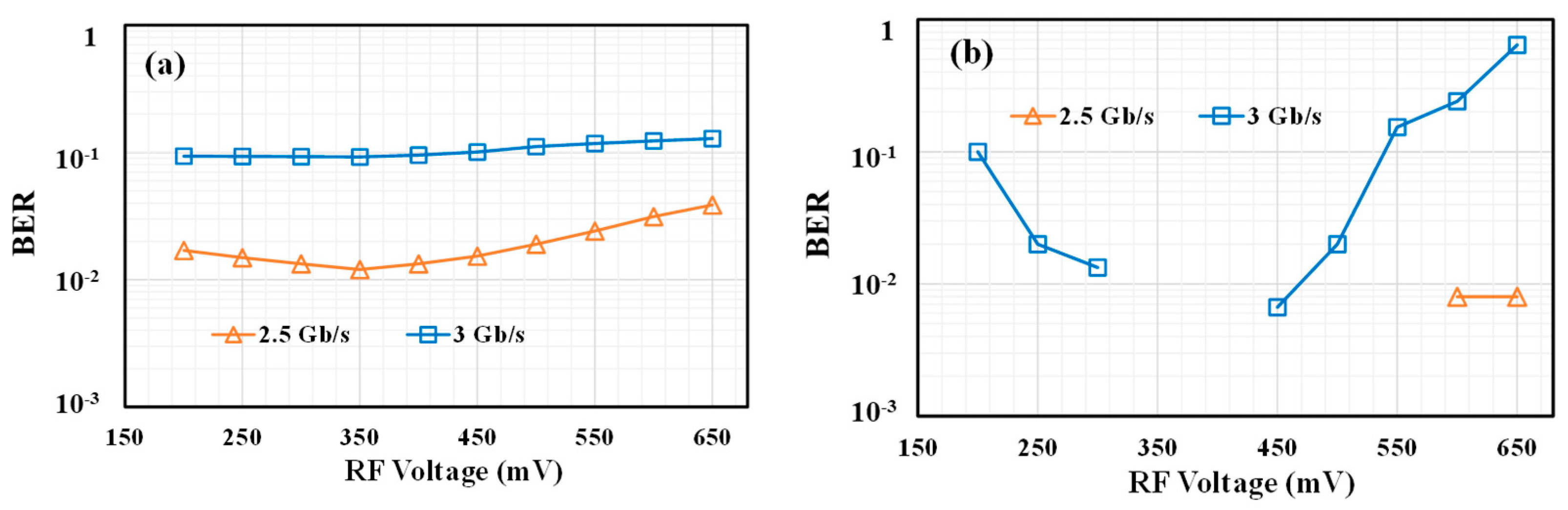
4. Experimental Results and Discussion
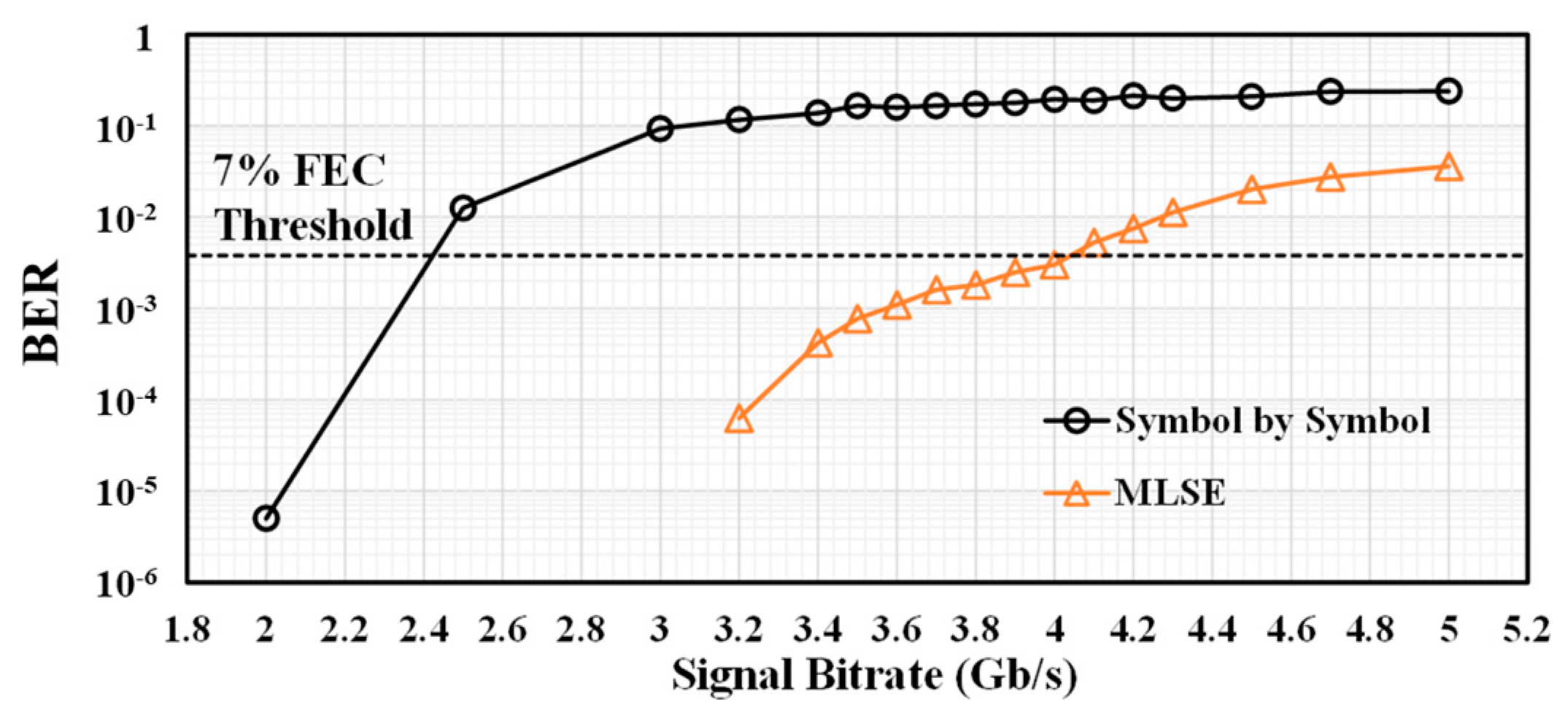
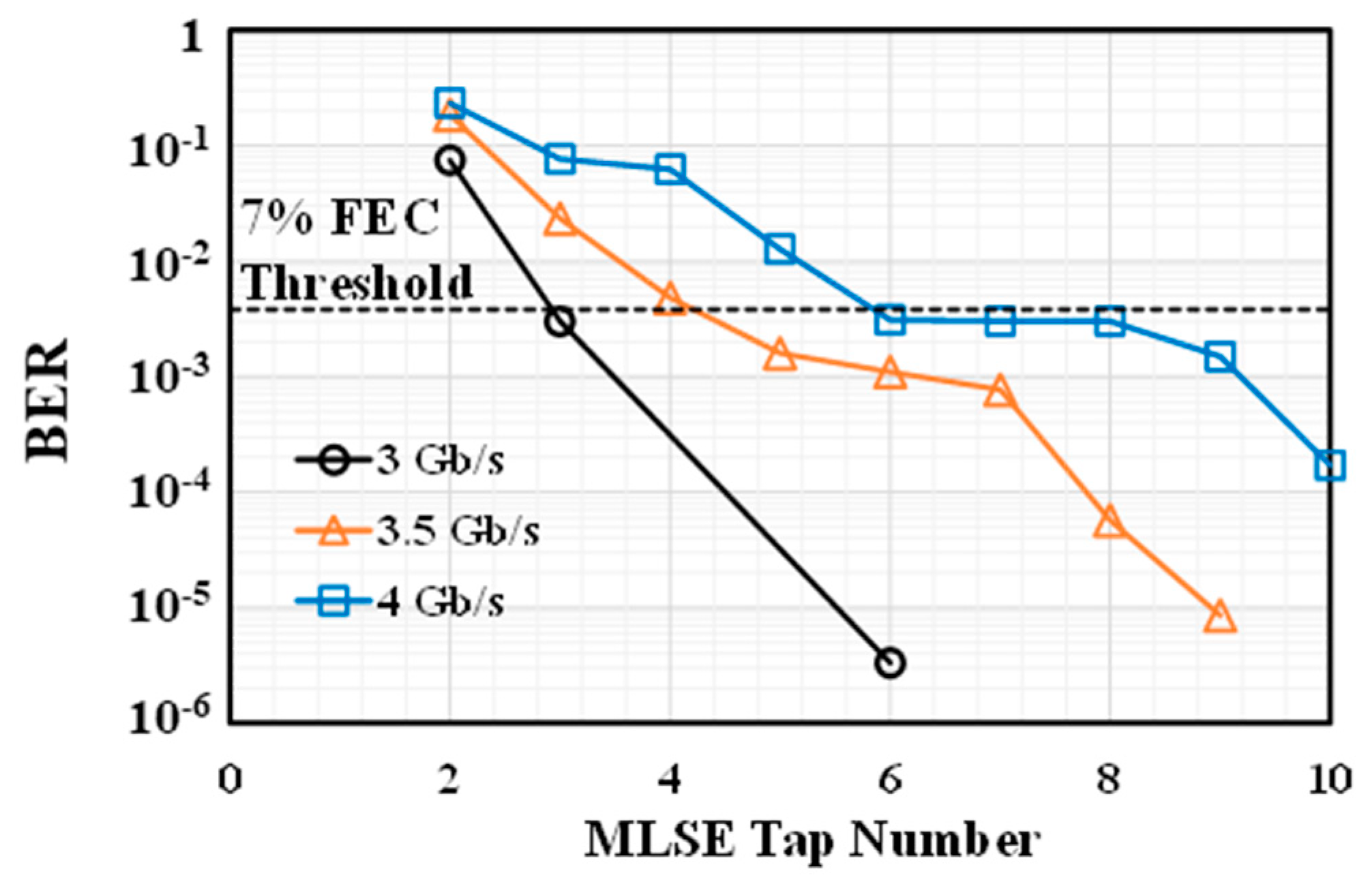
5. Simulation Results and Discussion
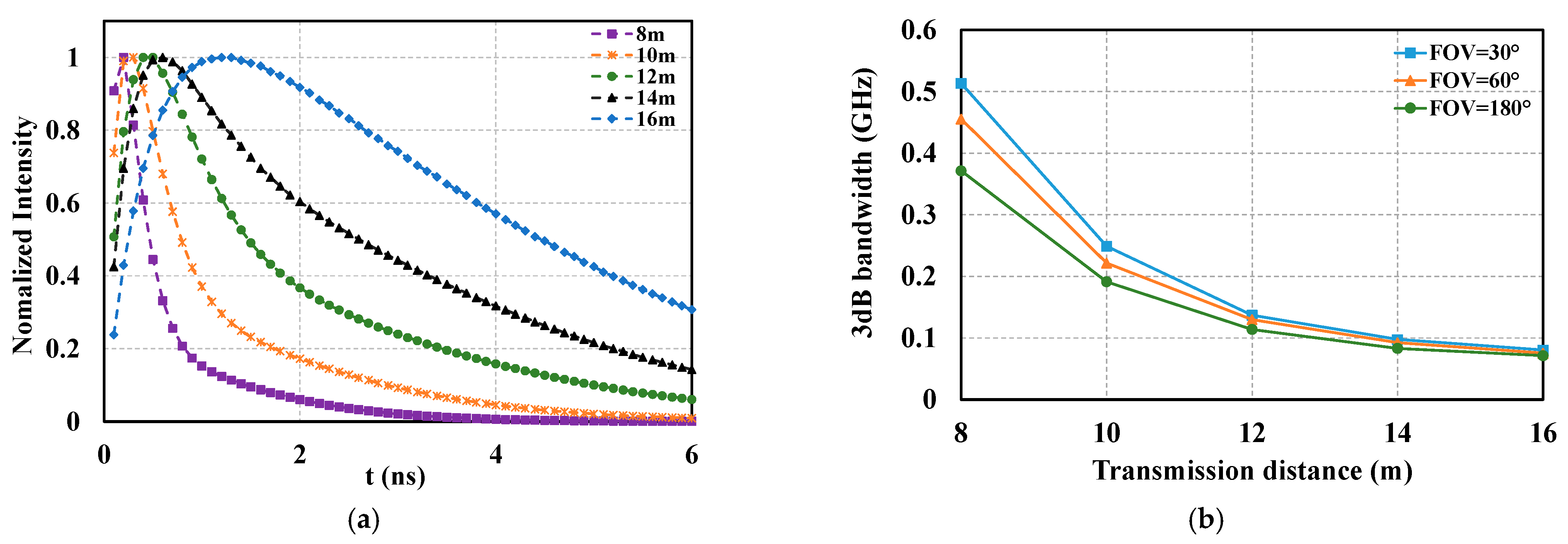
5.1. Channel Characteristics
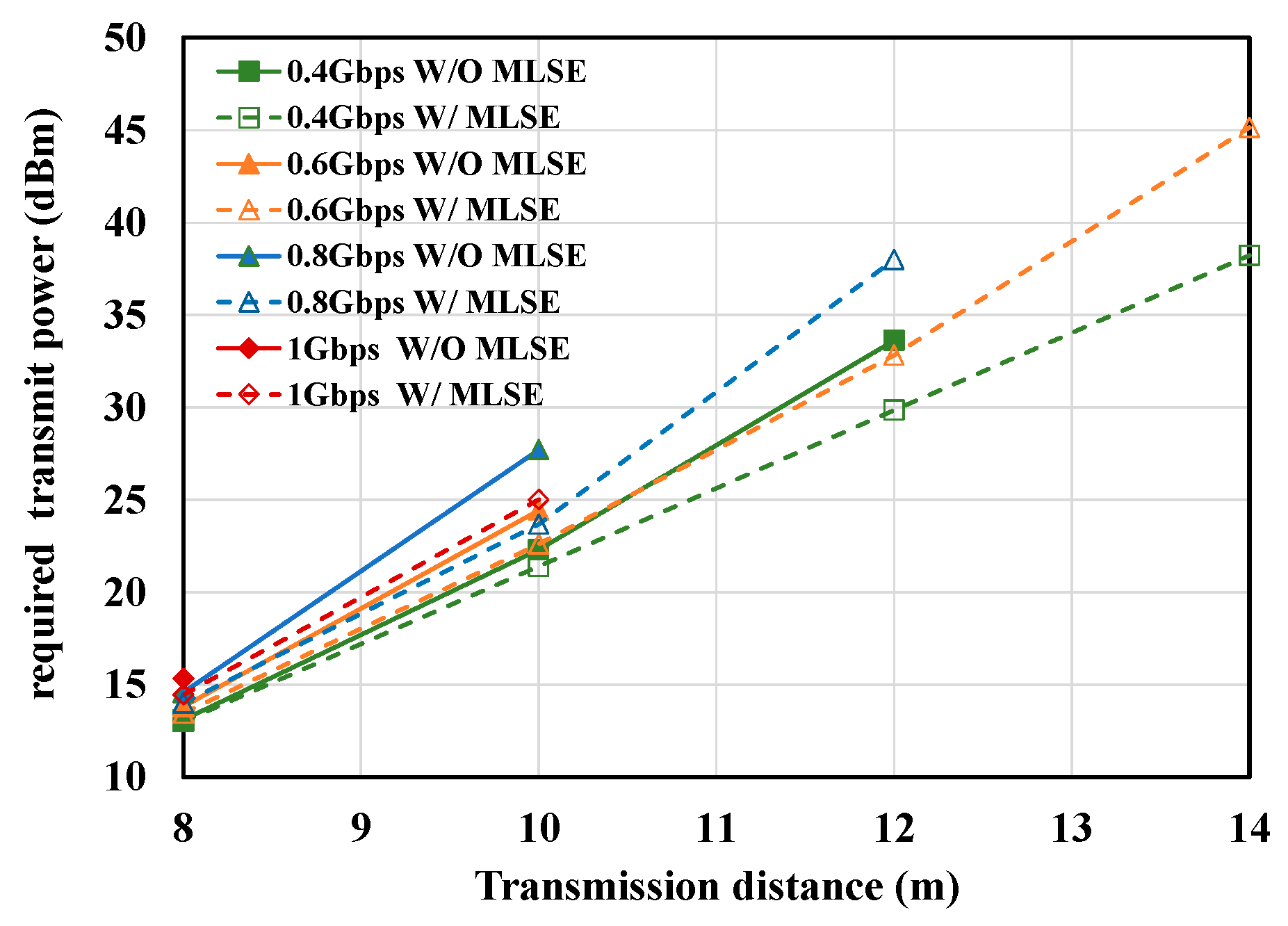
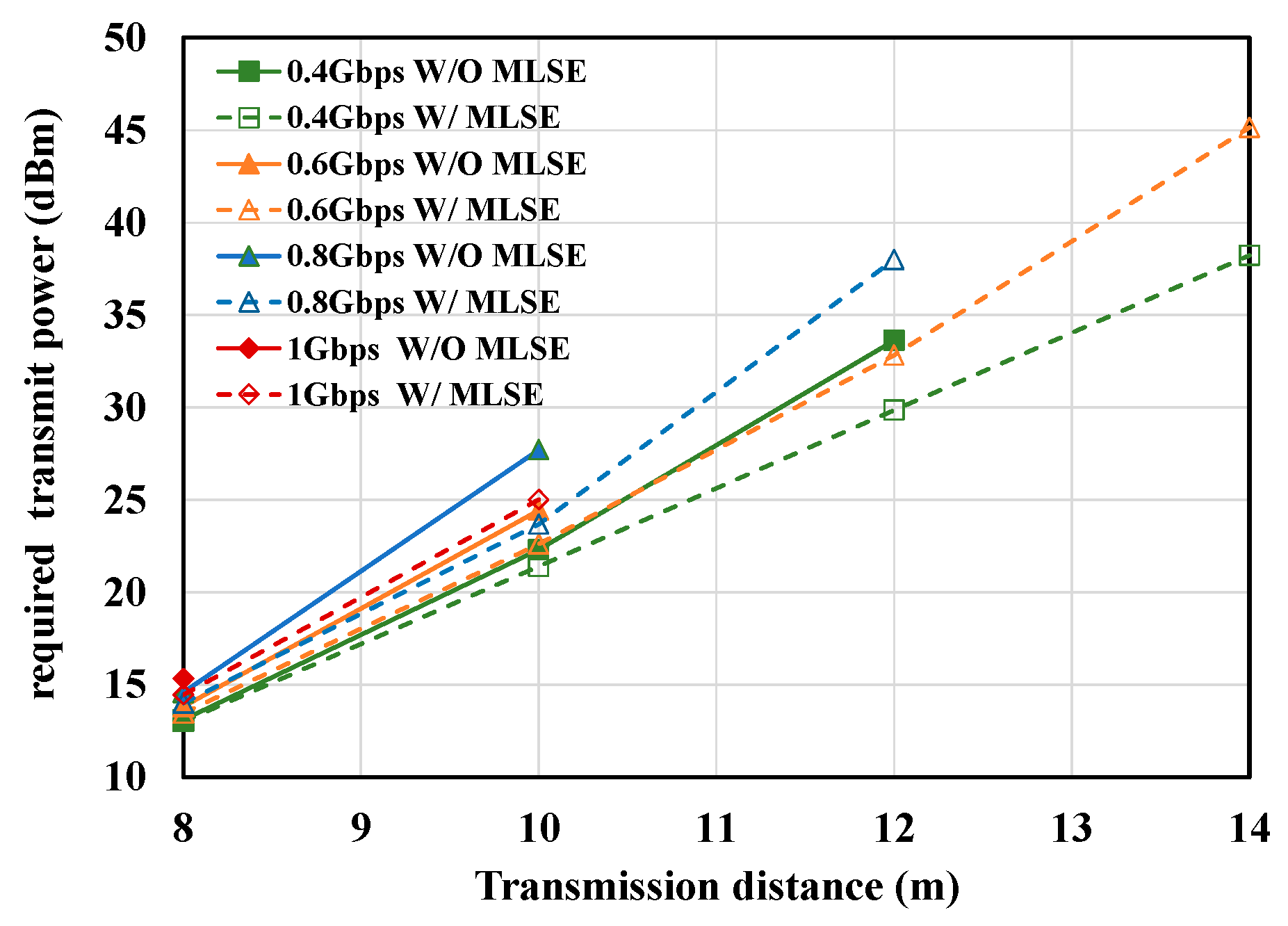
5.2. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A survey of underwater optical wireless communications. IEEE Commun. Surv. Tutor. 2016, 19, 204–238. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater optical wireless communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Underwater optical wireless communications, networking, and localization: A survey. Ad Hoc Netw. 2019, 94, 101935. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Yi, S.; Zhou, X.; Fang, Z.; Qiu, Z.J.; Hu, L.; Cong, C.; Zheng, L.; Liu, R.; Tian, P. 34.5 m underwater optical wireless communication with 2.70 Gbps data rate based on a green laser diode with NRZ-OOK modulation. Opt. Express 2017, 25, 27937–27947. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Wang, J.; Li, S.; Xu, Z. 60 m/2.5 Gbps Underwater Optical Wireless Communication with NRZ-OOK Modulation and Digital Nonlinear Equalization. In Proceedings of the 2019 Conference on Lasers and Electro-Optics (CLEO), San Jose, CA, USA, 5–10 May 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Li, C.-Y.; Lu, H.-H.; Tsai, W.-S.; Wang, Z.-H.; Hung, C.-W.; Su, C.-W.; Lu, Y.-F. A 5 m/25 Gbps Underwater Wireless Optical Communication System. IEEE Photonics J. 2018, 10, 1–9. [Google Scholar] [CrossRef]
- Fei, C.; Zhang, J.; Zhang, G.; Wu, Y.; Hong, X.; He, S. Demonstration of 15-M 7.33-Gb/s 450-nm Underwater Wireless Optical Discrete Multitone Transmission Using Post Nonlinear Equalization. J. Lightwave Technol. 2018, 36, 728–734. [Google Scholar] [CrossRef]
- Du, J.; Wang, Y.; Fei, C.; Chen, R.; Zhang, G.; Hong, X.; He, S. Experimental demonstration of 50-m/5-Gbps underwater optical wireless communication with low-complexity chaotic encryption. Opt. Express 2021, 29, 783–796. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lu, C.; Li, S.; Xu, Z. 100 m/500 Mbps underwater optical wireless communication using an NRZ-OOK modulated 520 nm laser diode. Opt. Express 2019, 27, 12171–12181. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Yang, X.; Tong, Z.; Dai, Y.; Li, X.; Zhao, M.; Zhang, Z.; Zhao, J.; Xu, J. 150 m/500 Mbps Underwater Wireless Optical Communication Enabled by Sensitive Detection and the Combination of Receiver-Side Partial Response Shaping and TCM Technology. J. Lightwave Technol. 2021, 39, 4614–4621. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, X.; Sun, C.; Chen, Z.; Li, Z.; Wang, H.; Jiang, R.; Shi, W.; Zhang, A. Over 10 attenuation length gigabits per second underwater wireless optical communication using a silicon photomultiplier (SiPM) based receiver. Opt. Express 2020, 28, 24968–24980. [Google Scholar] [CrossRef] [PubMed]
- Baghdady, J.; Miller, K.; Morgan, K.; Byrd, M.; Osler, S.; Ragusa, R.; Li, W.; Cochenour, B.M.; Johnson, E.G. Multi Gigabit/s underwater optical communication link using orbital angular momentum multiplexing. Opt. Express 2016, 24, 9794–9805. [Google Scholar] [CrossRef]
- Ren, Y.; Li, L.; Wang, Z.; Kamali, S.M.; Arbabi, E.; Arbabi, A.; Zhao, Z.; Xie, G.; Cao, Y.; Ahmed, N.; et al. Orbital Angular Momentum-based Space Division Multiplexing for High capacity Underwater Optical Communications. Sci. Rep. 2016, 6, 33306. [Google Scholar] [CrossRef] [PubMed]
- Tang, S.; Dong, Y.; Zhang, X. Impulse response modeling for underwater wireless optical communication links. IEEE Trans. Commun. 2014, 62, 226–234. [Google Scholar] [CrossRef]
- Jaruwatanadilok, S. Underwater wireless optical communication channel modeling and performance evaluation using vector radiative transfer theory. IEEE J. Sel. Areas Commun. 2008, 26, 1620–1627. [Google Scholar] [CrossRef]
- Gabriel, C.; Khalighi, M.; Bourennane, S.; Leon, P.; Rigaud, V. Channel modeling for underwater optical communication. In Proceedings of the IEEE GC Wkshps, Houston, TX, USA, 5–9 December 2011; pp. 833–837. [Google Scholar]
- Gabriel, C.; Khalighi, M.; Bourennane, S.; Leon, P.; Rigaud, V. Monte-Carlo-based channel characterization for underwater optical communication systems. IEEE/OSA J. Opt. Commun. Net. 2013, 5, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Cox, W.C. Simulation, Modeling and Design of Underwater Optical Communication Systems. In Dissertations & Theses—Gradworks; North Carolina State University: Raleigh, NC, USA, 2012; Volume 34, pp. 930–942. [Google Scholar]
- Li, J.; Ma, Y.; Zhou, Q.; Zhou, B.; Wang, H. Monte Carlo study on pulse response of underwater optical channel. Opt. Eng. 2012, 51, 066001. [Google Scholar] [CrossRef]
- Dalgleish, F.; Caimi, F.; Vuorenkoski, A. Efficient laser pulse dispersion codes for turbid undersea imaging and communications applications. Ocean Sens. Monit. II 2010, 7678, 1–12. [Google Scholar] [CrossRef]
- Mobley, C. Light and Water: Radiative Transfer in Natural Waters; Academic Press (Elsevier Science): Amsterdam, The Netherlands, 1994. [Google Scholar]
- Lillycrop, W.J.; Parson, L.E.; Irish, J.L. Development and Operation of the SHOALS Airborne Lidar Hydrographic System. In CIS Selected Papers: Laser Remote Sensing of Natural Waters: From Theory to Practice; SPIE: Bellingham, DC, USA, 1996; Volume 2964, pp. 26–37. [Google Scholar] [CrossRef]
- Cochenour, B.M.; Mullen, L.J. Free-space optical communications underwater. In Advanced Optical Wireless Communon System; Cambridge University Press: Cambridge, UK, 2012; pp. 201–239. [Google Scholar]
- Hickman, G.D.; Hogg, J.E. Application of an airborne pulsed laser for near shore bathymetric measurements. Remote Sens. Environ. 1969, 1, 47–58. [Google Scholar] [CrossRef]
- Lillycrop, W.J.; Parson, L.E.; Estep, L.L. Field testing of the U S Army Cops of engineers airborne lidar: Hydrography survey system. In Proceedings of the US Hydrographic Conference, Norfolk, VA, USA, 18–23 April 1994; pp. 144–151. [Google Scholar]
- Wang, L.; Jacques, S.L.; Zheng, L. MCML, Monte Carlo modeling of light transport in multi-layered tissues. Comput. Meth. Prog. Biomed. 1995, 47, 131–146. [Google Scholar] [CrossRef]
- Henyey, L.C.; Greenstein, J.L. Diffuse radiation in the Galaxy. Astrophys. J. 1941, 93, 70–83. [Google Scholar] [CrossRef]
- Manor, H.; Arnon, S. Performance of an optical wireless communication system as a function of wavelength. Appl. Opt. 2003, 42, 4285–4294. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Xie, C.; Zhang, J. Comparison of advanced detection techniques for QPSK signals in super-Nyquist WDM systems. IEEE Photonics Technol. Lett. 2014, 27, 105–108. [Google Scholar] [CrossRef]
- Gao, G.; Li, J.; Zhao, L.; Guo, Y.; Zhang, F. 1 Gb/s underwater optical wireless On-off-keying communication with 167 MHz receiver bandwidth. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–4. [Google Scholar]
- Xu, C.; Gao, G.; Chen, S.; Zhang, J.; Luo, M.; Hu, R.; Yang, Q. Sub-symbol-rate sampling for PDM-QPSK signals in super-Nyquist WDM systems using quadrature poly-binary shaping. Opt. Express 2016, 24, 26678–26686. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Gao, G.; Xu, C.; Bai, J.; Guo, Y. Influence of Temporal Dispersion on the Undersea Wireless Optical Communication and Its Mitigation using MLSE. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Karinou, F.; Stojanović, N.; Yu, Z.; Zhao, Y. Toward cost-efficient 100G metro networks using IM/DD 10 GHz components and MLSE receiver. J. Lightwave Technol. 2015, 33, 4109–4117. [Google Scholar] [CrossRef]
- Hamza, T.; Khalighi, M.-A.; Bourennane, S.; Léon, P.; Opderbecke, J. Investigation of solar noise impact on the performance of underwater wireless optical communication links. Opt. Express 2016, 24, 25832–25845. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |
| Coefficient | Value |
| absorption coefficient a | 0.366 m−1 |
| scattering coefficient b | 1.824 m−1 |
| refractive index n | 1.33 |
| PMT cumulative integration time td | 0.1 ns |
| radius of receive aperture R | 50 cm |
| asymmetry factor g | 0.9 |
| photon number simulation | 108 |
| various fields of view (FOV) | 30° |
| (b) | |
| Coefficient | Value |
| electronic bandwidth B | 20 GHz |
| quantum efficiency of the detector η | 0.8 |
| wavelength of the source λ | 532 nm |
| the electron charge q | 1.6 × 10−19 coulombs |
| dark current Idc | 1.226 nA |
| equivalent temperature Te | 290 K |
| noise figure F | 4 |
| load resistance RL | 100 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Gao, G.; Li, J.; Ma, Z.; Guo, Y. Experimental Demonstration and Simulation of Bandwidth-Limited Underwater Wireless Optical Communication with MLSE. Photonics 2022, 9, 182. https://doi.org/10.3390/photonics9030182
Zhang J, Gao G, Li J, Ma Z, Guo Y. Experimental Demonstration and Simulation of Bandwidth-Limited Underwater Wireless Optical Communication with MLSE. Photonics. 2022; 9(3):182. https://doi.org/10.3390/photonics9030182
Chicago/Turabian StyleZhang, Jialiang, Guanjun Gao, Jingwen Li, Ziqi Ma, and Yonggang Guo. 2022. "Experimental Demonstration and Simulation of Bandwidth-Limited Underwater Wireless Optical Communication with MLSE" Photonics 9, no. 3: 182. https://doi.org/10.3390/photonics9030182
APA StyleZhang, J., Gao, G., Li, J., Ma, Z., & Guo, Y. (2022). Experimental Demonstration and Simulation of Bandwidth-Limited Underwater Wireless Optical Communication with MLSE. Photonics, 9(3), 182. https://doi.org/10.3390/photonics9030182