Infrared Ocean Image Simulation Algorithm Based on Pierson–Moskowitz Spectrum and Bidirectional Reflectance Distribution Function

 ,
, 

Abstract
:1. Introduction
- Considering the deformation of the 3D ocean model caused by the changes of the camera shooting angle and distance, a position computing model combining the pinhole camera imaging process with a P-M spectrum-based 3D ocean model is proposed to improve the clarity of the simulation image. The influence of wave gradient changes is considered to help correct the model;
- To take into consideration the reflection of sun radiance and sky background radiance, we present a grayscale computing model based on the BRDF and pinhole camera imaging process to improve the authenticity of the simulation image. In addition, the scattered light in the atmosphere, which has direct influence on the image screen, is also considered in this model;
- A variety of infrared ocean simulation images under multiple camera shooting angles and spatial resolutions are provided. The clarity of the simulation image is quantitatively evaluated by the information entropy function. The authenticity of simulation images is quantitatively evaluated by the Kullback–Leibler divergence (K–L divergence).
2. Background
3. Theory of Infrared Ocean Image Simulation Algorithm
3.1. Reflection Model of Ocean Surface
3.2. Spontaneous Radiation Model of Ocean Surface
3.3. Imaging Model of Ocean Surface
4. Experimental Results
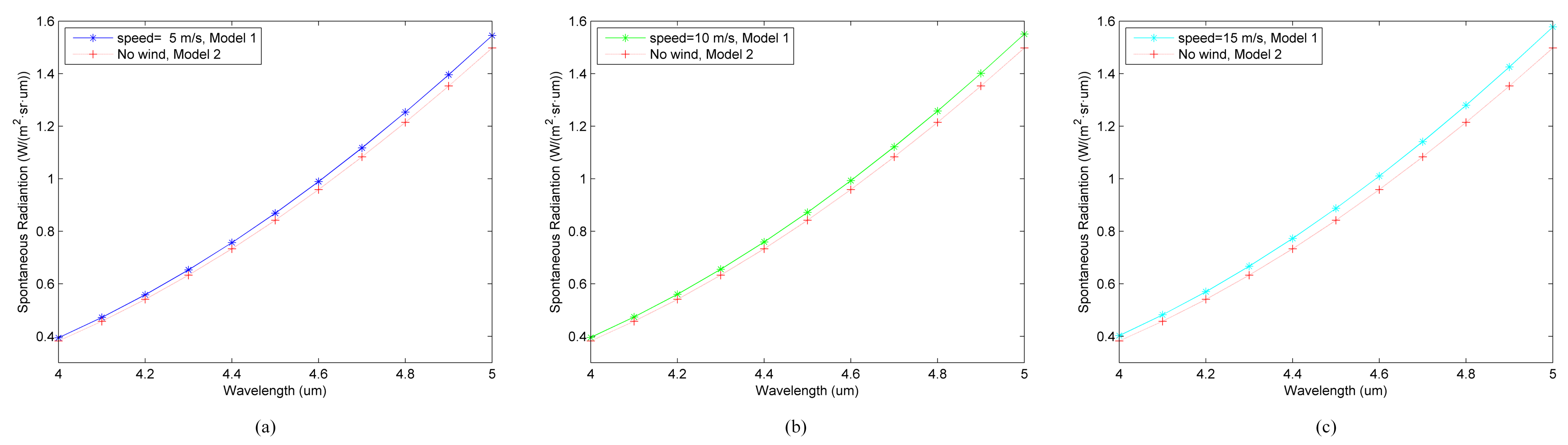
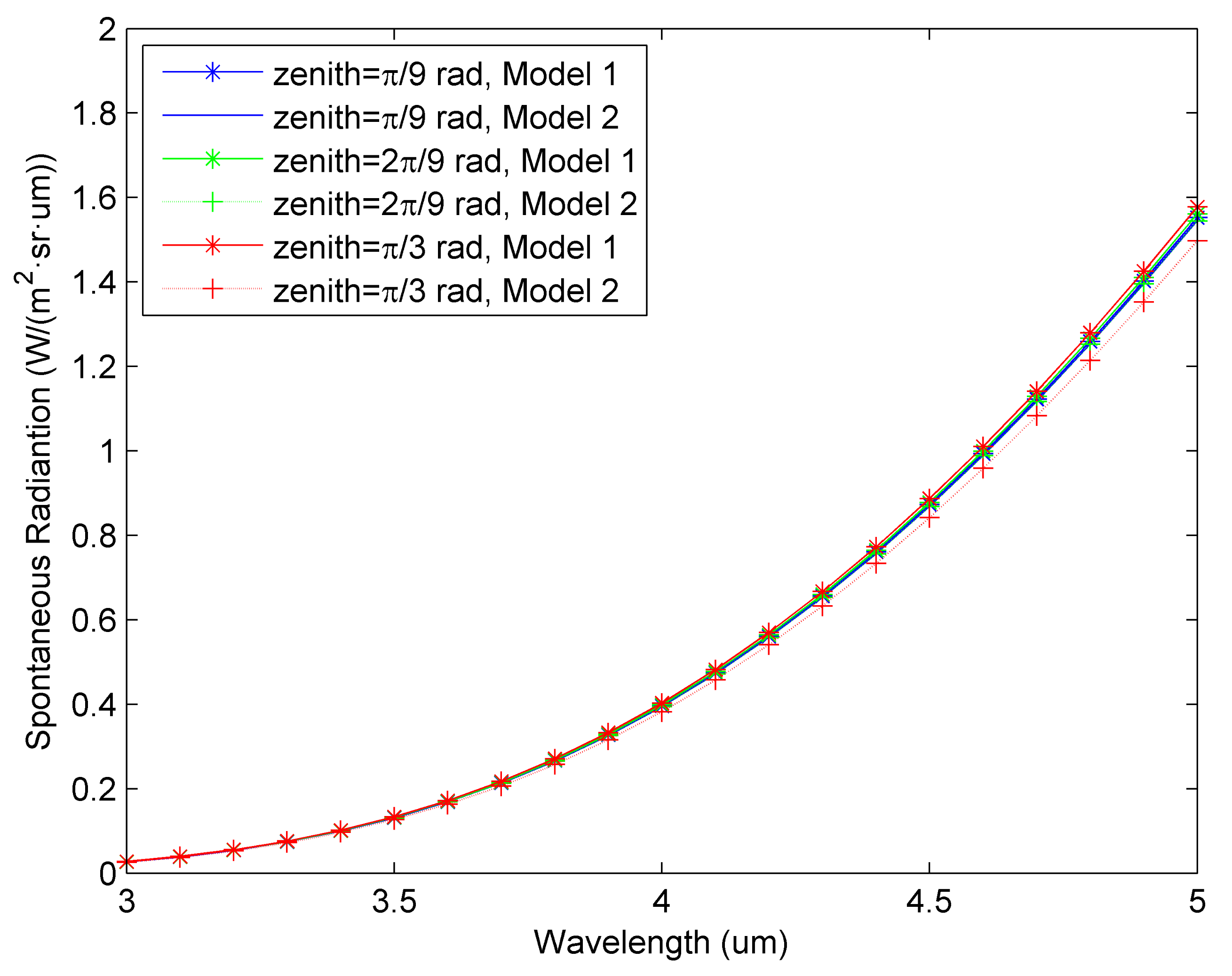
4.1. Analysis of Models
4.2. Analysis of Simulation Images
4.2.1. Details and Parameter Setting
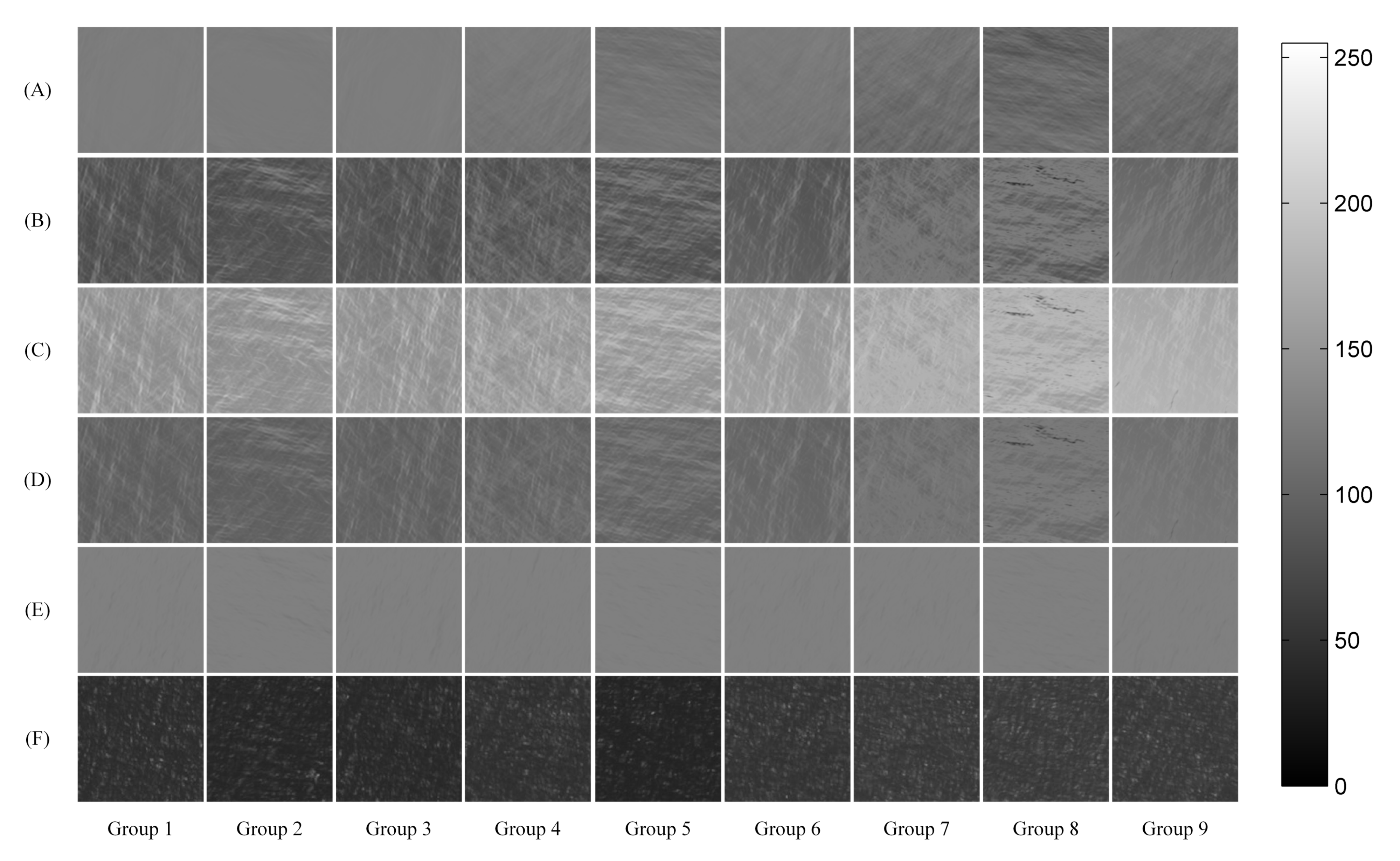
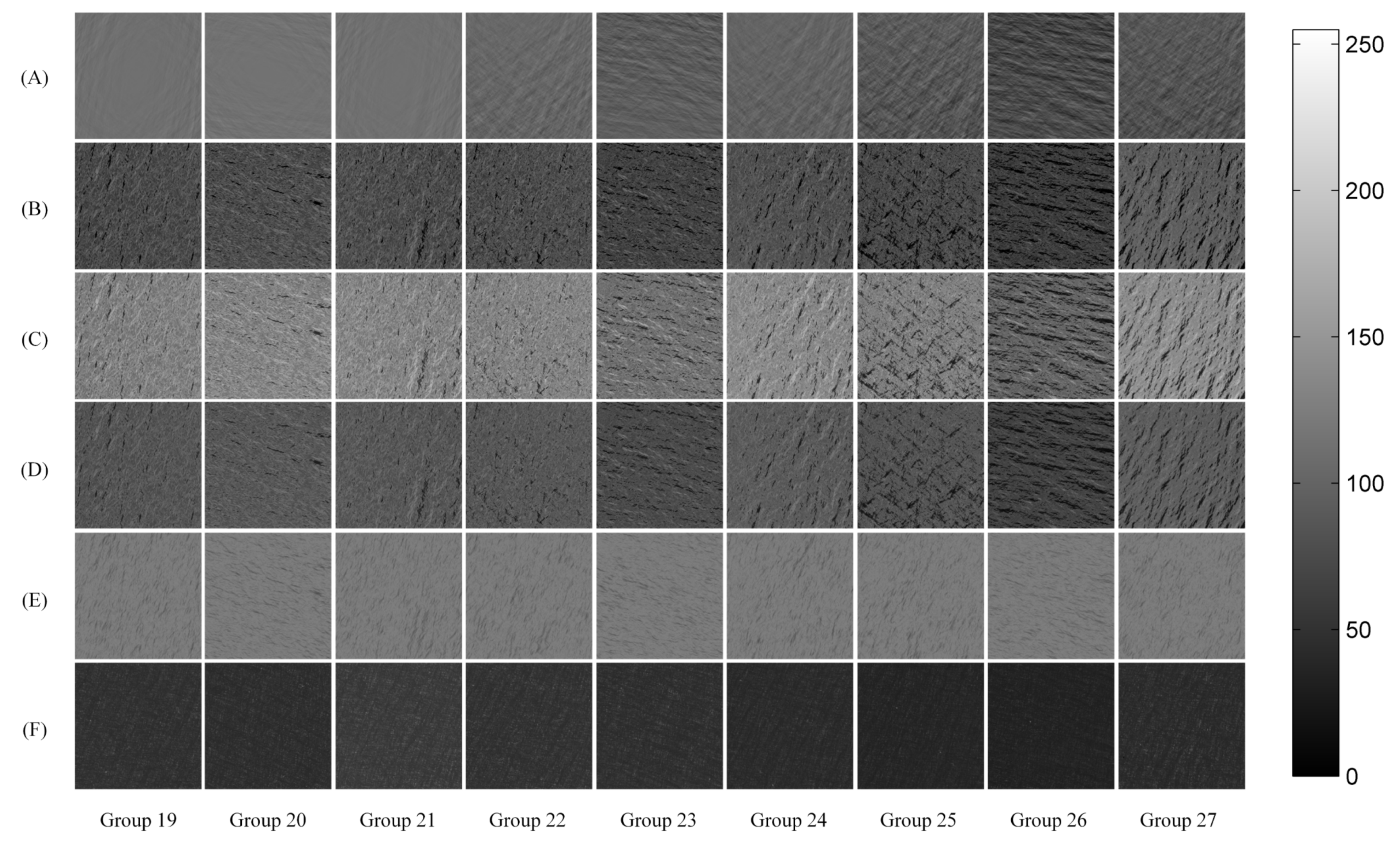
4.2.2. Qualitative Comparison
4.2.3. Quantitative Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wen, Z.; Liu, Z.; Liang, W. Real-time rendering of ocean special effects based on GPU. Comput. Eng. Des. 2010, 31, 4426–4429. (In Chinese) [Google Scholar]
- Shi, K.; Hao, Y.; Wang, M.; Fu, S. Real-time simulation method of infrared sea background. Infrared Laser Eng. 2012, 41, 25–29. (In Chinese) [Google Scholar]
- Wang, Y.; Xie, X.; Yang, J.; Fan, P. The Research on Dynamic Simulation of IR Sea Background Scene. J. Proj. Rocket. Missiles Guid. 2015, 35, 199–202, 207. (In Chinese) [Google Scholar]
- Zhao, Y.; Li, Y.; Zhang, Y.; Rao, P. A space-based infrared detection scene generation system for moving objects with sea background. Opt. Precis. Eng. 2017, 25, 487–493. (In Chinese) [Google Scholar]
- Tang, S.; Chen, Z.; Li, X. Study on Simulation of Sea Sky Infrared Imaging based on Neural Network and Measured Data. In Proceedings of the IOP Conference Series Materials Science and Engineering, Padang, Indonesia, 8–9 November 2018. [Google Scholar]
- Xiao, C.; Lin, J.; Wu, K. Study on infrared radiation characteristics model of sea surface. In Proceedings of the Second Target Recognition and Artificial Intelligence Summit Forum, Shenyang, China, 28–30 August 2020. [Google Scholar]
- Zhang, W.; Xuan, Y.; Han, Y. Infrared Image Simulation of Global Ocean Surface. Infrared Technol. 2006, 28, 170–173. (In Chinese) [Google Scholar]
- Chen, X.; Lin, C.; Yang, L. Infrared Scene Simulation of Sea-Sky Background Based on Equivalent Temperature Method. Mech. Electr. Eng. Technol. 2015, 44, 36–39, 173. (In Chinese) [Google Scholar]
- Zhang, X.; Wu, L.; Long, L.; Zhang, L. Detailed real-time infrared radiation simulation applied to the sea surface. In Proceedings of the International Conference on Optical Instruments and Technology, Beijing, China, 28–30 October 2017. [Google Scholar]
- Zhang, H.; Qu, B.; Jin, L.; Ma, C. Infrared imaging simulation of sea surface detection of underwater vehicle thermal wake target. J. Appl. Opt. 2019, 40, 525–534. [Google Scholar]
- Pierson, W.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Chentanez, N.; Müller-Fischer, M. Real-time Eulerian water simulation using a restricted tall cell grid. ACM Trans. Graph. 2011, 30, 1–10. [Google Scholar] [CrossRef]
- Wilf, I.; Manor, Y. Simulation of sea surface images in the infrared. Appl. Opt. 1984, 23, 3174–3180. [Google Scholar] [CrossRef] [PubMed]
- Frechot, J. Realistic simulation of ocean surface using wave spectra. In Proceedings of the First International Conference on Computer Graphics Theory and Applications (GRAPP), Setúbal, Portugal, 25–28 February 2006. [Google Scholar]
- Nicodemus, F. Directional Reflectance and Emissivity of an Opaque Surface. Appl. Opt. 1965, 4, 767–773. [Google Scholar] [CrossRef]
- Cook, R.; Torrance, K. A reflectance models for computer graphics. ACM Trans. Graph. 1982, 1, 7–24. [Google Scholar] [CrossRef]
- Wang, F. Theoretical Research and Actual Measurement of Wave Infrared Transmittance in the Atmosphere at Different Altitudes. Master’s Thesis, Yunnan Normal University, Kunming, China, 18 March 2020. (In Chinese). [Google Scholar]
- Wilson, M. A Method of Computing Ship Contrast Temperatures Including Results Based on Weather Ship J Environment Data; ADA078794; AVANO: Saint-Nazaire, France, 1979. [Google Scholar]
- Liu, G.; Ni, J. Autofocusing of ISAR image based on entropy minimization. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1240–1252. [Google Scholar]
- Seo, G.; Yoo, J.; Choi, J.; Kwak, N. KL-Divergence-Based Region Proposal Network for Object Detection. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Virtual, 25–28 October 2020. [Google Scholar]
- Cui, G.; Zhang, K.; Mao, L.; Xu, Z.; Feng, H. Micro-image definition evaluation using multi-scale decomposition and gradient absolute value. Opto-Electron. Eng. 2019, 46, 59–69. (In Chinese) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Value |
|---|---|---|
| Wind speed | 10 | m/s |
| Near-earth atmosphere temperature | 290 | K |
| Solar zenith angle | rad | |
| Solar azimuth angle | rad |
| Parameter | Value | Value |
|---|---|---|
| Wavelength | 3 to 5 | m |
| Image resolution | 0.5, 1, 2 | m |
| Detector zenith angle | 0, | rad |
| Detector azimuth angle | 0, | rad |
| Group Number | Image Resolution/m | Detector Zenith Angle/rad | Detector Azimuth Angle/rad |
|---|---|---|---|
| 1 | 0.5 | 0 | 0 |
| 2 | 0.5 | 0 | |
| 3 | 0.5 | 0 | |
| 4 | 0.5 | 0 | |
| 5 | 0.5 | ||
| 6 | 0.5 | ||
| 7 | 0.5 | 0 | |
| 8 | 0.5 | ||
| 9 | 0.5 | ||
| 10 | 1 | 0 | 0 |
| 11 | 1 | 0 | |
| 12 | 1 | 0 | |
| 13 | 1 | 0 | |
| 14 | 1 | ||
| 15 | 1 | ||
| 16 | 1 | 0 | |
| 17 | 1 | ||
| 18 | 1 | ||
| 19 | 2 | 0 | 0 |
| 20 | 2 | 0 | |
| 21 | 2 | 0 | |
| 22 | 2 | 0 | |
| 23 | 2 | ||
| 24 | 2 | ||
| 25 | 2 | 0 | |
| 26 | 2 | ||
| 27 | 2 |
| Evaluation Index | Algorithm 1 | Algorithm 2 | Algorithm 3 |
|---|---|---|---|
| Entropy function | 2.725 | 1.586 | 2.332 |
| K–L divergence | 11.446 | 11.508 | 11.514 |
| Evaluation Index | Algorithm 1 | Algorithm 2 | Algorithm 3 |
|---|---|---|---|
| Running time/s | 30.622 | 31.610 | 38.981 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhou, L.; Zhou, M.; Shao, A.; Ren, K.; Chen, Q.; Gu, G.; Wan, M. Infrared Ocean Image Simulation Algorithm Based on Pierson–Moskowitz Spectrum and Bidirectional Reflectance Distribution Function. Photonics 2022, 9, 166. https://doi.org/10.3390/photonics9030166
Chen X, Zhou L, Zhou M, Shao A, Ren K, Chen Q, Gu G, Wan M. Infrared Ocean Image Simulation Algorithm Based on Pierson–Moskowitz Spectrum and Bidirectional Reflectance Distribution Function. Photonics. 2022; 9(3):166. https://doi.org/10.3390/photonics9030166
Chicago/Turabian StyleChen, Xueqi, Lin Zhou, Meng Zhou, Ajun Shao, Kan Ren, Qian Chen, Guohua Gu, and Minjie Wan. 2022. "Infrared Ocean Image Simulation Algorithm Based on Pierson–Moskowitz Spectrum and Bidirectional Reflectance Distribution Function" Photonics 9, no. 3: 166. https://doi.org/10.3390/photonics9030166
APA StyleChen, X., Zhou, L., Zhou, M., Shao, A., Ren, K., Chen, Q., Gu, G., & Wan, M. (2022). Infrared Ocean Image Simulation Algorithm Based on Pierson–Moskowitz Spectrum and Bidirectional Reflectance Distribution Function. Photonics, 9(3), 166. https://doi.org/10.3390/photonics9030166