FPGA-Based Dynamic Wavelength Interrogation System for Thousands of Identical FBG Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. System Structure
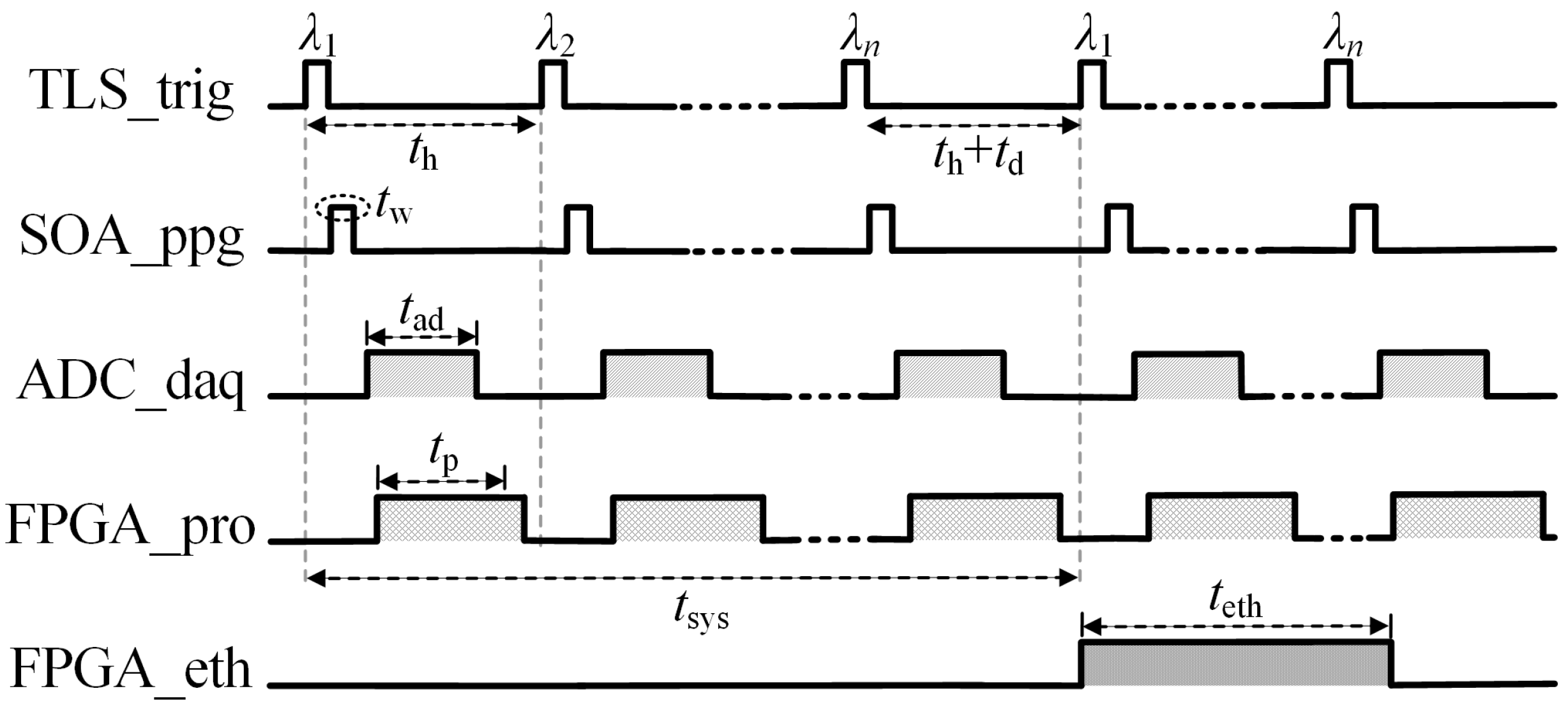
2.2. Interrogation Frequency
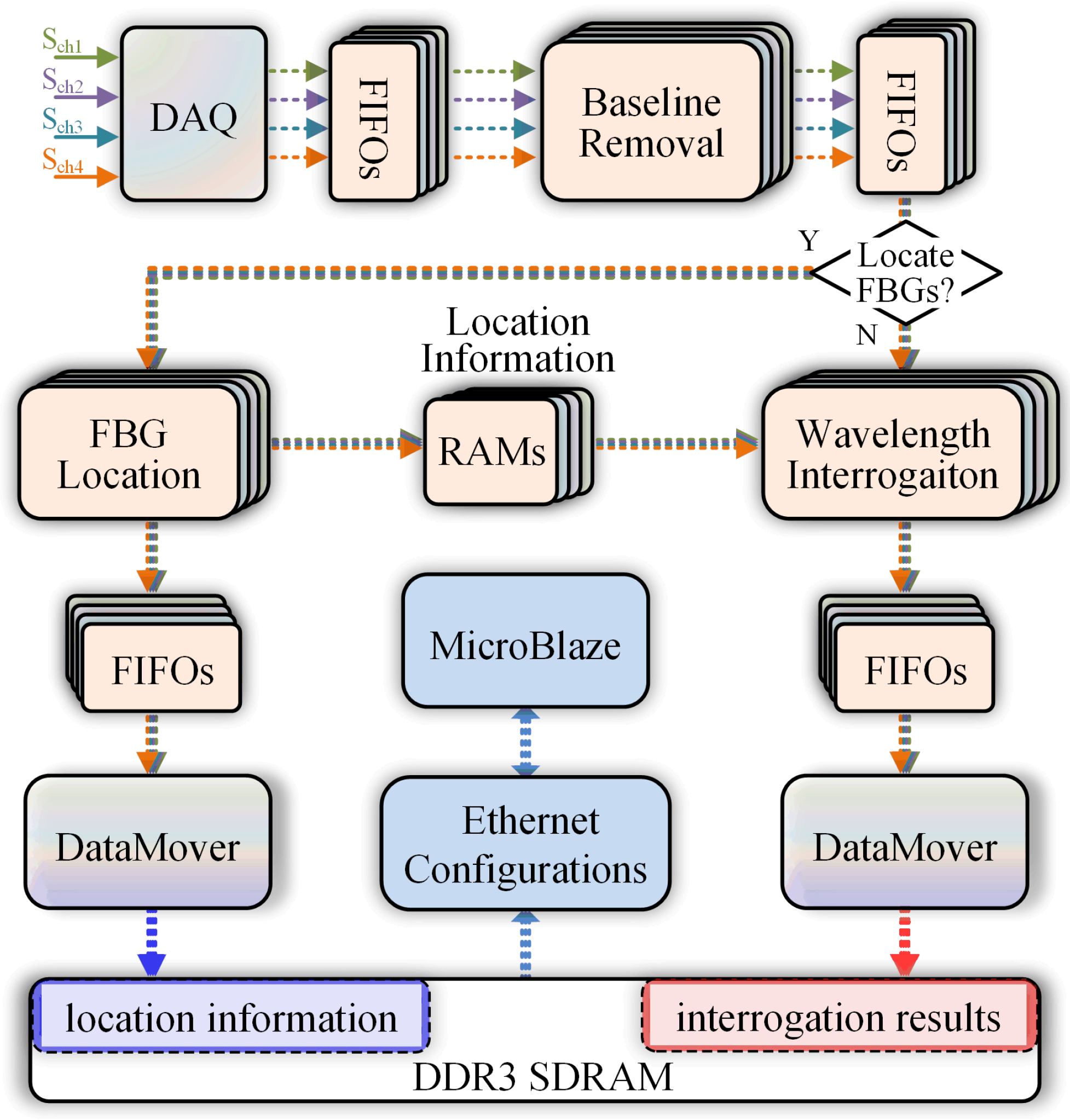
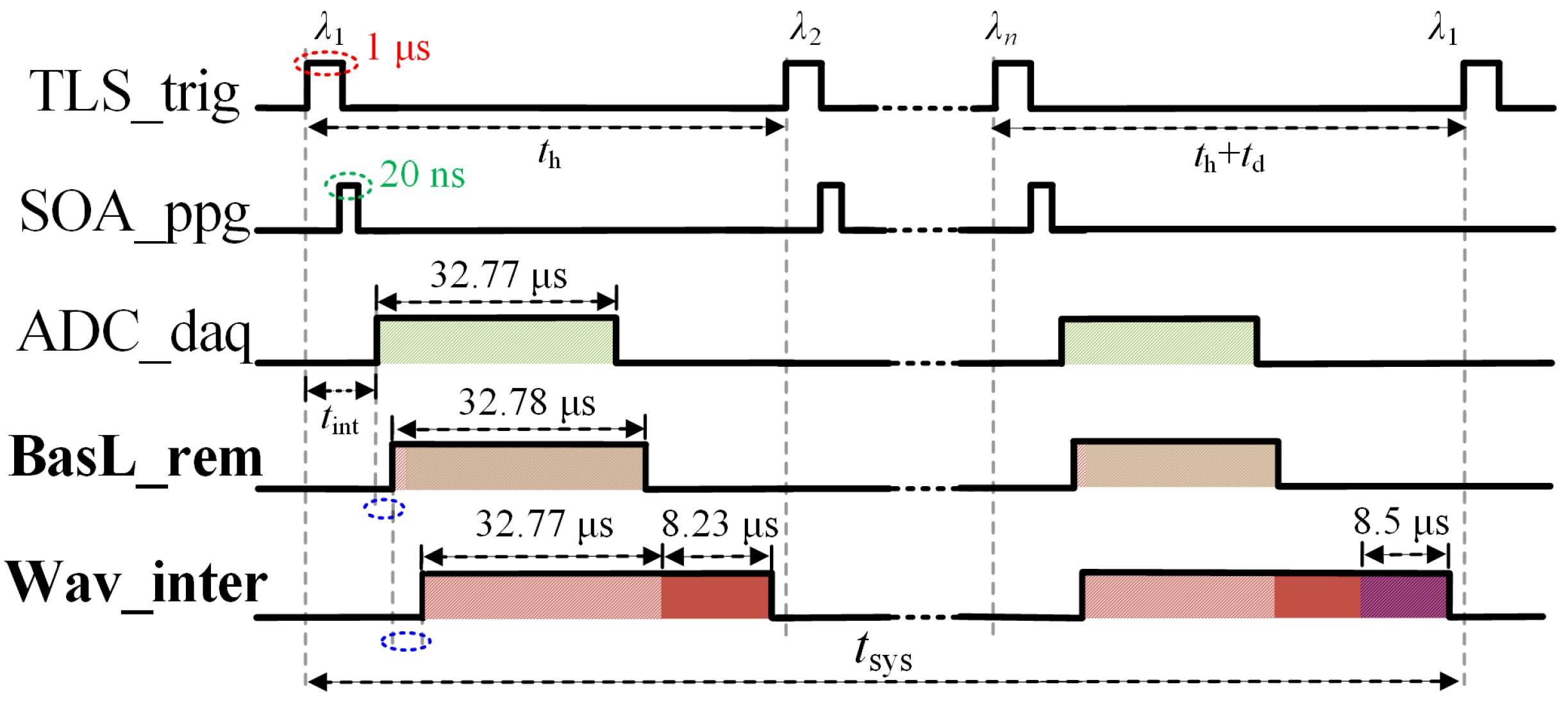
2.3. Signal Processing
3. Implementation
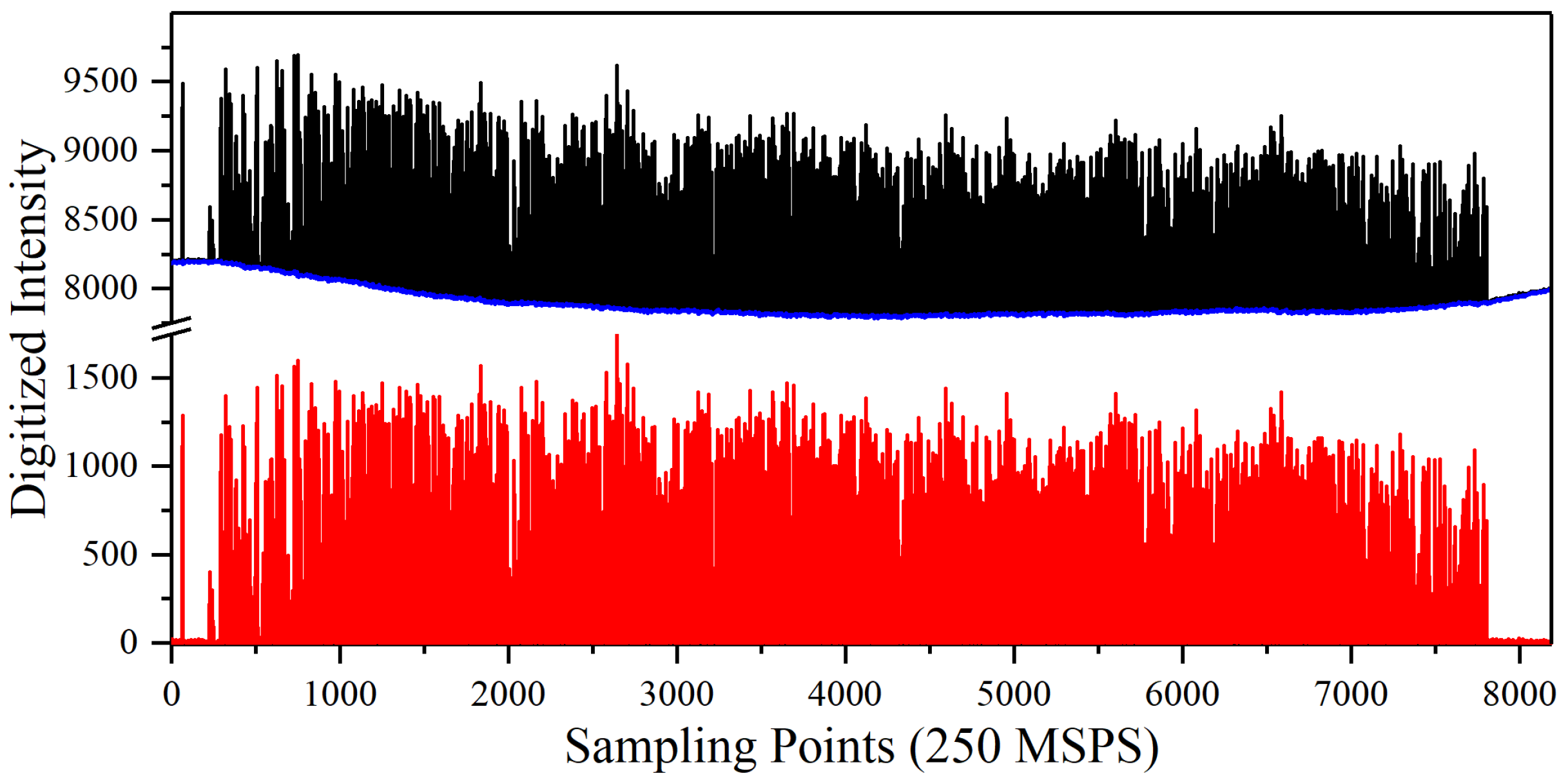
3.1. Signal Conditioning
- 1.
- Load the parameters of fitting coefficient from the LBS, and read the first data of the sampled data sequence ;
- 2.
- Initialize the baseline sequence , and output the corrected data ;
- 3.
- Continuously read the sampled data sequence , and obtain the baseline sequence . Then, the corrected data can be calculated by .
3.2. FBG Location
- 1.
- Initialize the RAM block and the counter value to zero at power-on. Load the parameters of total wavelength scanning times and minimum peak height ;
- 2.
- Read the returning pulses train from FIFO of the previous stage (baseline removal), load the data stored in the RAM block , and increase by one;
- 3.
- Calculate the sum of and , and then store the result back to the RAM;
- 4.
- Repeat steps 2 and 3 until ;
- 5.
- Set to zero and construct a RAM block to store the location information of the sensing array. Here, is a data sequence with the local peaks of the , and the parameter is used to avoid the noises. Specially, the first element in stores the number of FBGs.
3.3. Wavelength Interrogation
- 1.
- Before the interrogation, initialize the counter value to zero, reset two RAM blocks and to zero, and load parameter n;
- 2.
- Read the returning pulses train from previous FIFO, load the location information , and increase by one;
- 3.
- Obtain the number of FBGs , and then calculate the numerator and denominator terms for each FBG by:
- Seeking the peak value of jth FBG around ;
- , and ;
- 4.
- Repeat steps 2 and 3 until ;
- 5.
- Set to zero, calculate the wavelength result of each FBG, and then reset and to zero;
- 6.
- Repeat steps 2, 3, 4, and 5 for a continuous-running interrogation.
3.4. Data Transfer
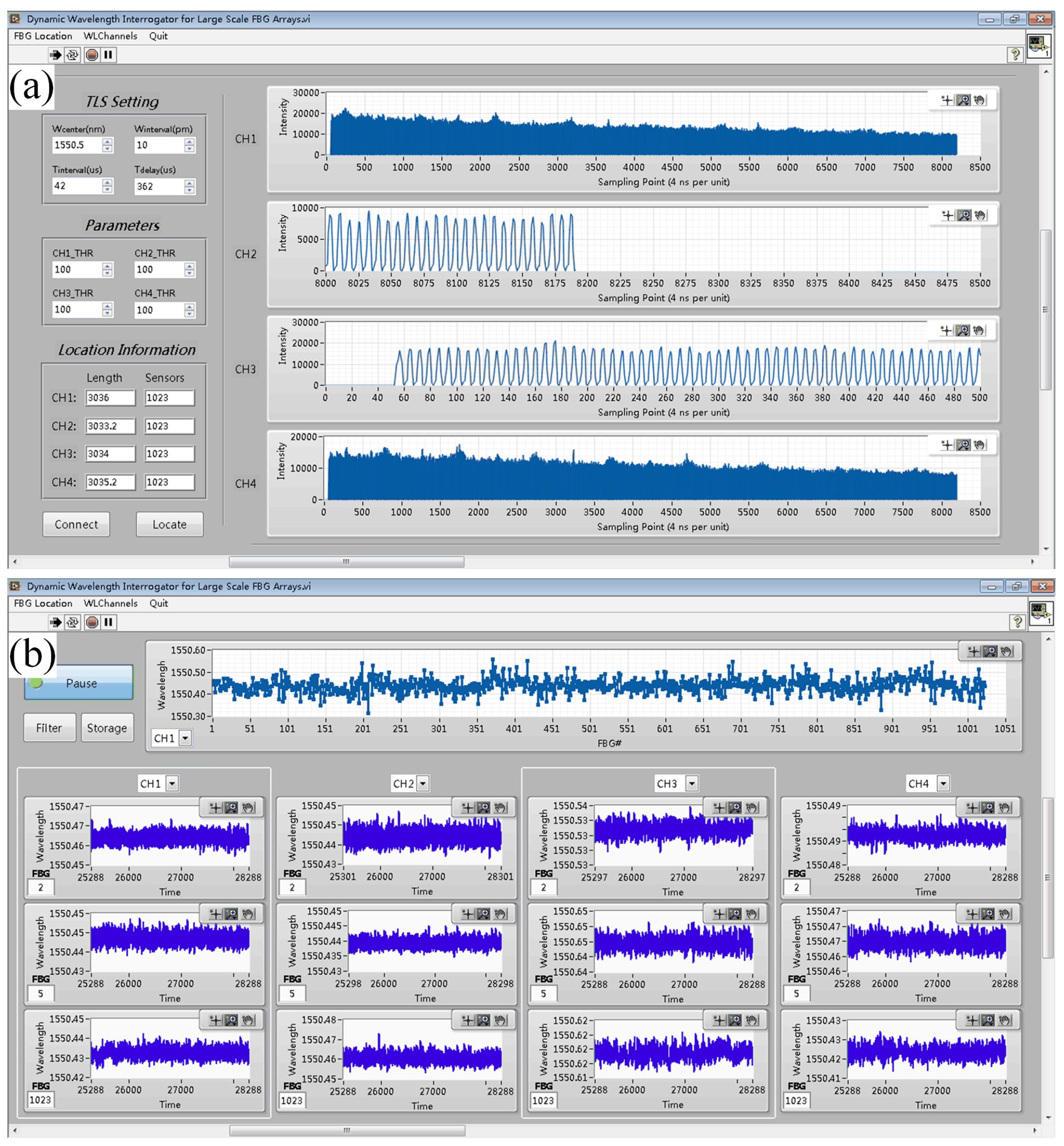
4. Experiment
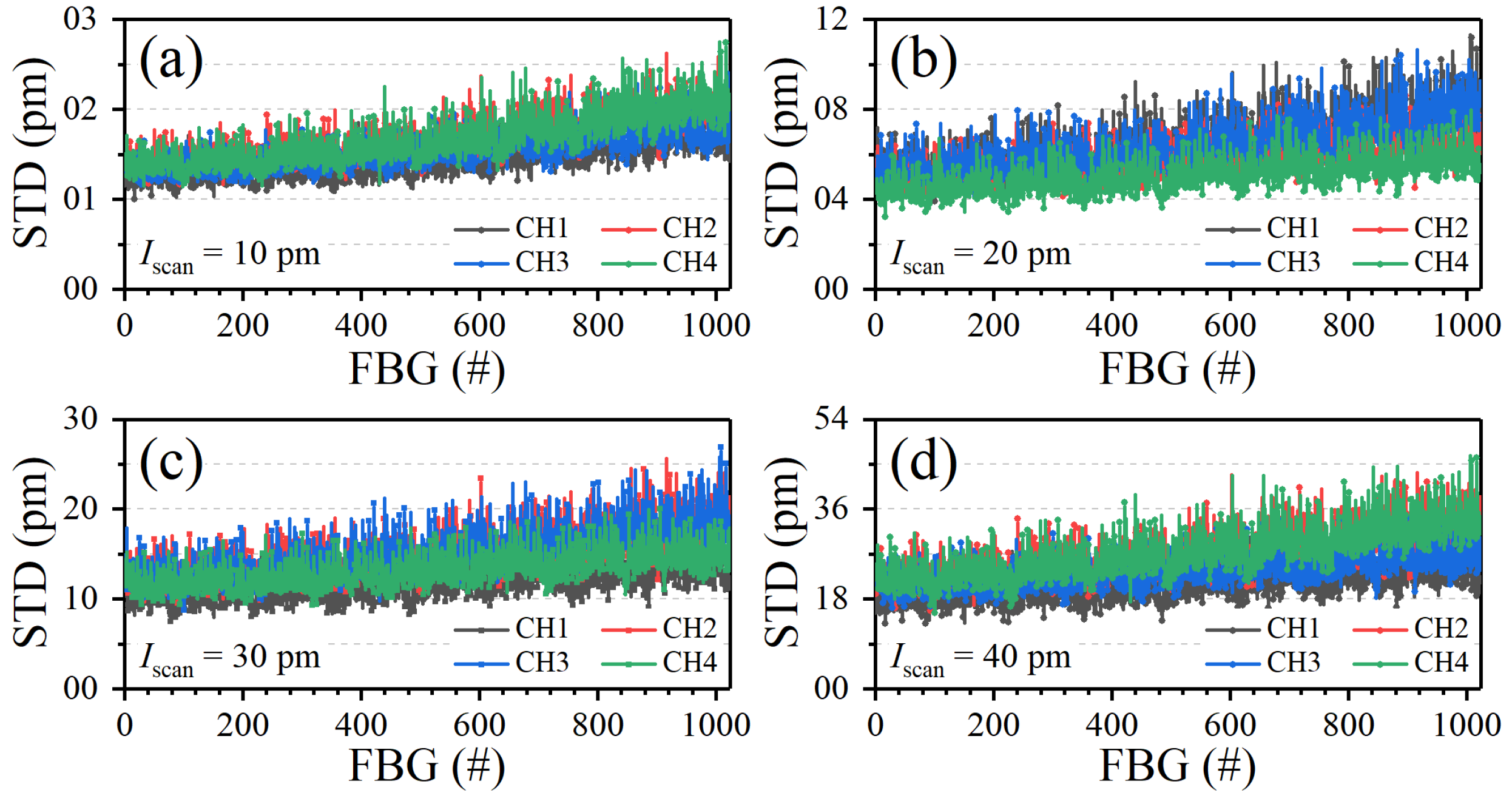
4.1. Sensing Performance
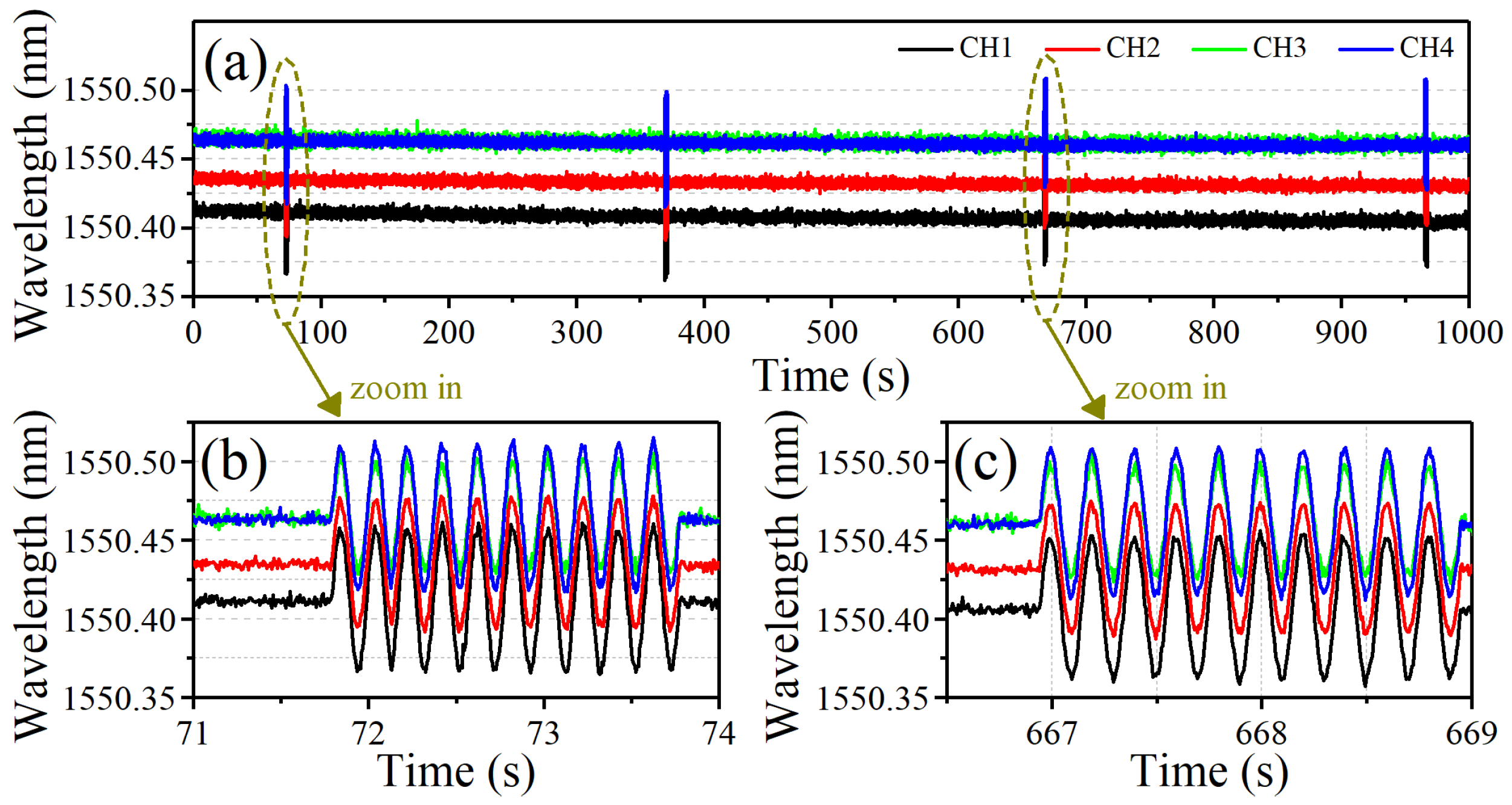
4.2. Distributed Real-Time Sensing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, X.; Liang, D.; Zeng, J.; Asundi, A. Genetic algorithm-support vector regression for high reliability SHM system based on FBG sensor network. Opt. Lasers Eng. 2012, 50, 148–153. [Google Scholar] [CrossRef]
- Mieloszyk, M.; Majewska, K.; Zywica, G.; Kaczmarczyk, T.Z.; Jurek, M.; Ostachowicz, W. Fibre Bragg grating sensors as a measurement tool for an organic Rankine cycle micro-turbogenerator. Measurement 2020, 157, 107666. [Google Scholar] [CrossRef]
- Talebinejad, I.; Fischer, C.; Ansari, F. Serially multiplexed FBG accelerometer for structural health monitoring of bridges. Smart. Struct. Syst. 2009, 5, 345–355. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, F.; Li, J.; Xiao, W. A hybrid support vector regression with multi-domain features for low-velocity impact localization on composite plate structure. Mech. Syst. Signal Process. 2021, 154, 107547. [Google Scholar] [CrossRef]
- Xia, L.; Wu, Y.; Rahubadde, U.; Li, W. TDM Interrogation of Identical Weak FBGs Network Based on Delayed Laser Pulses Differential Detection. IEEE Photonics J. 2018, 10, 1–8. [Google Scholar] [CrossRef]
- Ou, Y.; Zhou, C.; Qian, L.; Fan, D.; Cheng, C.; Guo, H.; Xiong, Z. Large WDM FBG Sensor Network Based on Frequency-Shifted Interferometry. IEEE Photonics Technol. Lett. 2017, 29, 535–538. [Google Scholar] [CrossRef]
- Hwang, D.; Seo, D.C.; Kwon, I.B.; Chung, Y. Restoration of Reflection Spectra in a Serial FBG Sensor Array of a WDM/TDM Measurement System. Sensors 2012, 12, 12836–12843. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Li, J.; Wu, L.; Wang, F.; Xiao, W. A novel bat algorithm with double mutation operators and its application to low-velocity impact localization problem. Eng. Appl. Artif. Intell. 2020, 90, 103505. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, X.; Zhang, F.; Sun, Z.; Min, L.; Li, S.; Jiang, S.; Li, M.; Wang, C.; Ni, J. Reliable high sensitivity FBG geophone for low frequency seismic acquisition. Measurement 2018, 129, 62–67. [Google Scholar] [CrossRef]
- Wang, Y.; Gong, J.; Dong, B.; Wang, D.Y.; Shillig, T.J.; Wang, A. A Large Serial Time-Division Multiplexed Fiber Bragg Grating Sensor Network. J. Lightw. Technol. 2012, 30, 2751–2756. [Google Scholar] [CrossRef]
- Chan, C.C.; Jin, W.; Ho, H.; Suleyman Demokan, M. Performance analysis of a time-division-multiplexed fiber Bragg grating sensor array by use of a tunable laser source. IEEE J. Sel. Top. Quantum Electron. 2000, 6, 741–749. [Google Scholar] [CrossRef]
- Dai, Y.; Li, P.; Liu, Y.; Asundi, A.; Leng, J. Integrated real-time monitoring system for strain/temperature distribution based on simultaneous wavelength and time division multiplexing technique. Opt. Lasers Eng. 2014, 59, 19–24. [Google Scholar] [CrossRef]
- Luo, Z.; Wen, H.; Guo, H.; Yang, M. A time- and wavelength-division multiplexing sensor network with ultra-weak fiber Bragg gratings. Opt. Express 2013, 21, 22799–22807. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, C.; Bai, W. High-Speed Interrogation for Large-Scale Fiber Bragg Grating Sensing. Sensors 2018, 18, 665. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Gong, J.; Wang, D.Y.; Dong, B.; Bi, W.; Wang, A. A Quasi-Distributed Sensing Network with Time-Division-Multiplexed Fiber Bragg Gratings. IEEE Photon. Technol. Lett. 2011, 23, 70–72. [Google Scholar] [CrossRef]
- Ball, G.A.; Morey, W.W.; Cheo, P.K. Fiber laser source/analyzer for Bragg grating sensor array interrogation. J. Lightw. Technol. 1994, 12. [Google Scholar] [CrossRef]
- Huber, R.; Adler, D.C.; Fujimoto, J.G. Buffered Fourier domain mode locking: Unidirectional swept laser sources for optical coherence tomography imaging at 370,000 lines/s. Opt. Lett. 2006, 31, 2975–2977. [Google Scholar] [CrossRef]
- Askins, C.G.; Putnam, M.A.; Friebele, E.J. Instrumentation for interrogating many-element fiber Bragg grating arrays. In Proceedings of the Smart Structures and Materials 1995: Smart Sensing, Processing, and Instrumentation, San Diego, CA, USA, 26 February–3 March 1995; Volume 2444, pp. 257–266. [Google Scholar] [CrossRef]
- Yang, Y.; Wu, J.; Wang, M.; Wang, Q.; Yu, Q.; Chen, K.P. Fast Demodulation of Fiber Bragg Grating Wavelength from Low-Resolution Spectral Measurements Using Buneman Frequency Estimation. J. Lightw. Technol. 2020, 38, 5142–5148. [Google Scholar] [CrossRef]
- Monmasson, E.; Cirstea, M.N. FPGA Design Methodology for Industrial Control Systems—A Review. IEEE Trans. Ind. Electron. 2007, 54, 1824–1842. [Google Scholar] [CrossRef]
- Cui, K.; Peng, W.; Ren, Z.; Qian, J.; Zhu, R. FPGA-based interrogation controller with optimized pipeline architecture for very large-scale fiber-optic interferometric sensor arrays. Opt. Lasers Eng. 2019, 121, 389–396. [Google Scholar] [CrossRef]
- Huang, S.M.; Stott, A.L.; Green, R.G.; Beck, M.S. Electronic transducers for industrial measurement of low value capacitances. J. Phys. E Sci. Instrum. 1988, 21, 242–250. [Google Scholar] [CrossRef]
- Leger, M.N.; Ryder, A.G. Comparison of Derivative Preprocessing and Automated Polynomial Baseline Correction Method for Classification and Quantification of Narcotics in Solid Mixtures. Appl. Spectrosc. 2006, 60, 182–193. [Google Scholar] [CrossRef] [PubMed]
- Werzinger, S.; Bergdolt, S.; Engelbrecht, R.; Thiel, T.; Schmauss, B. Quasi-Distributed Fiber Bragg Grating Sensing Using Stepped Incoherent Optical Frequency Domain Reflectometry. J. Lightwave Technol. 2016, 34, 5270–5277. [Google Scholar] [CrossRef]
- Guo, H.; Tang, J.; Li, X.; Zheng, Y.; Yu, H.; Yu, H. On-line writing identical and weak fiber Bragg grating arrays. Chin. Opt. Lett. 2013, 11, 030602. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Fu, X.; Gao, H.; Gui, X.; Wang, H.; Li, Z. FPGA-Based Dynamic Wavelength Interrogation System for Thousands of Identical FBG Sensors. Photonics 2022, 9, 79. https://doi.org/10.3390/photonics9020079
Wang J, Fu X, Gao H, Gui X, Wang H, Li Z. FPGA-Based Dynamic Wavelength Interrogation System for Thousands of Identical FBG Sensors. Photonics. 2022; 9(2):79. https://doi.org/10.3390/photonics9020079
Chicago/Turabian StyleWang, Jiaqi, Xuelei Fu, Hui Gao, Xin Gui, Honghai Wang, and Zhengying Li. 2022. "FPGA-Based Dynamic Wavelength Interrogation System for Thousands of Identical FBG Sensors" Photonics 9, no. 2: 79. https://doi.org/10.3390/photonics9020079
APA StyleWang, J., Fu, X., Gao, H., Gui, X., Wang, H., & Li, Z. (2022). FPGA-Based Dynamic Wavelength Interrogation System for Thousands of Identical FBG Sensors. Photonics, 9(2), 79. https://doi.org/10.3390/photonics9020079