A Low-Frequency Magnetic Field Sensor Based on Fiber Bragg Gratings


Abstract
:1. Introduction
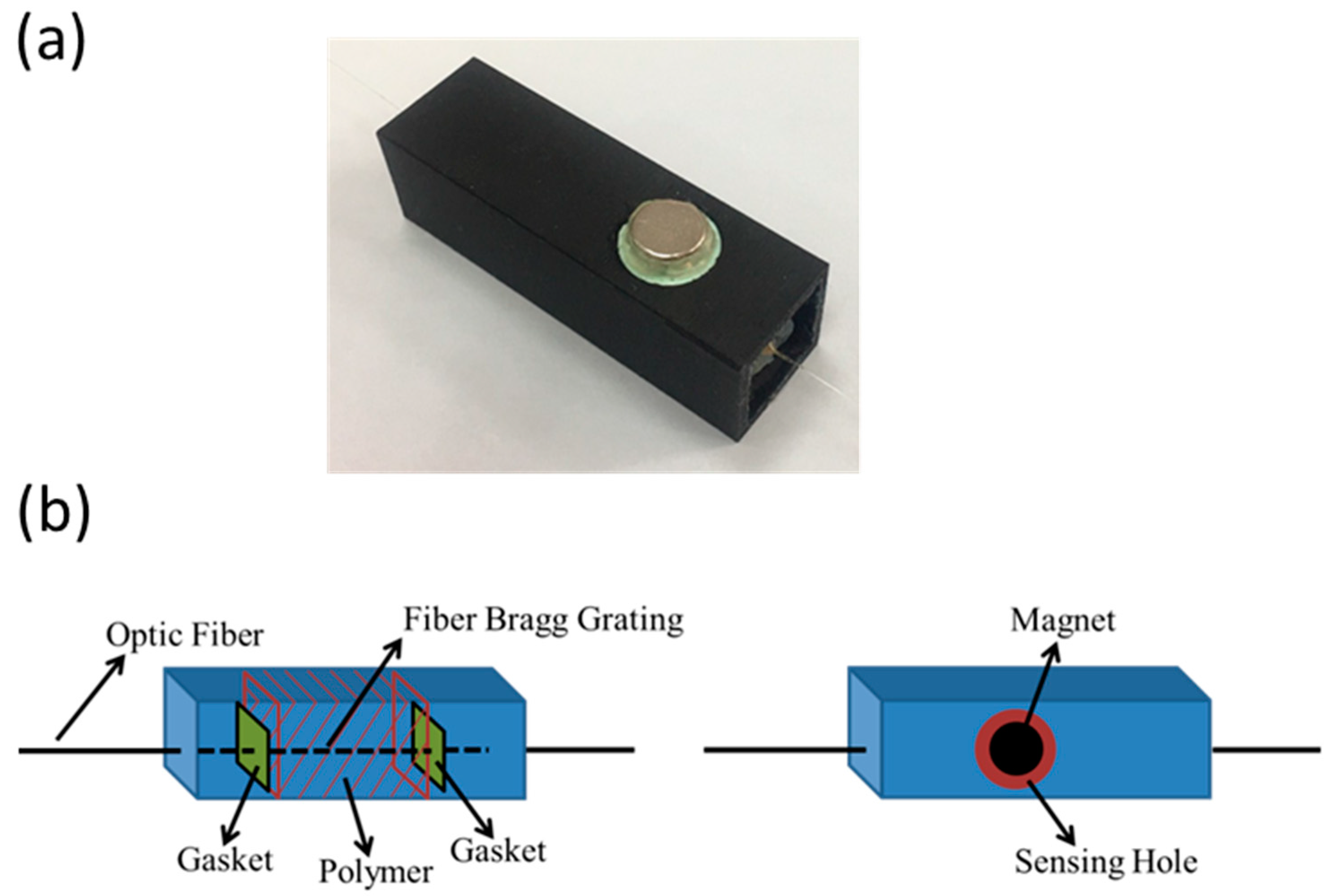
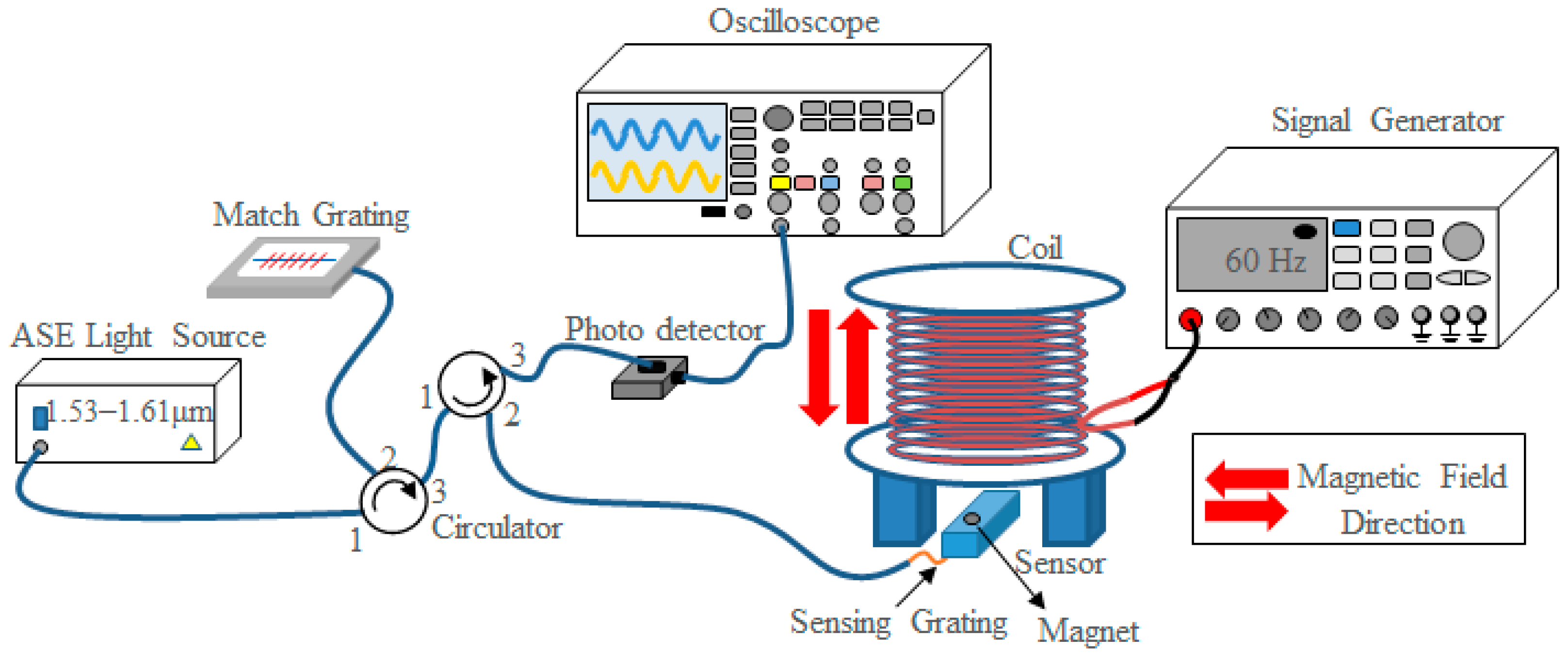
2. Materials and Methods
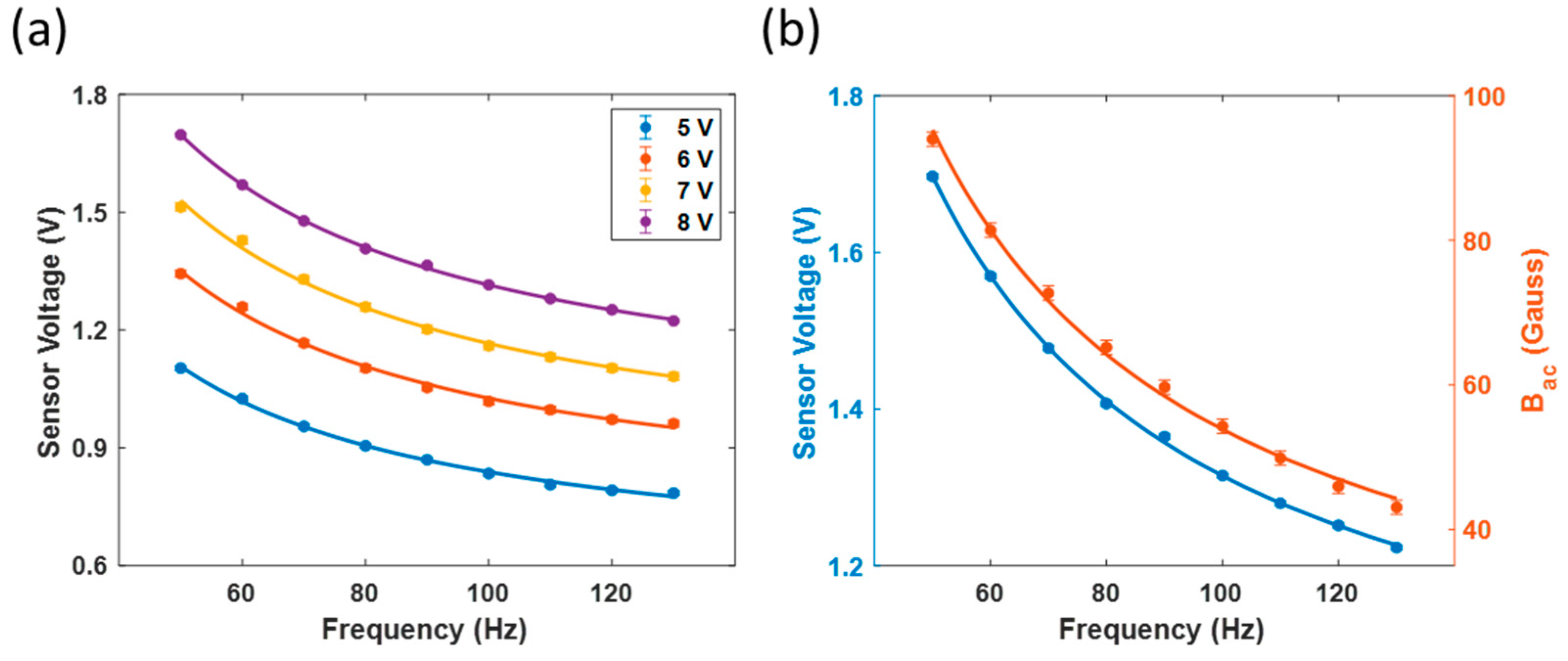
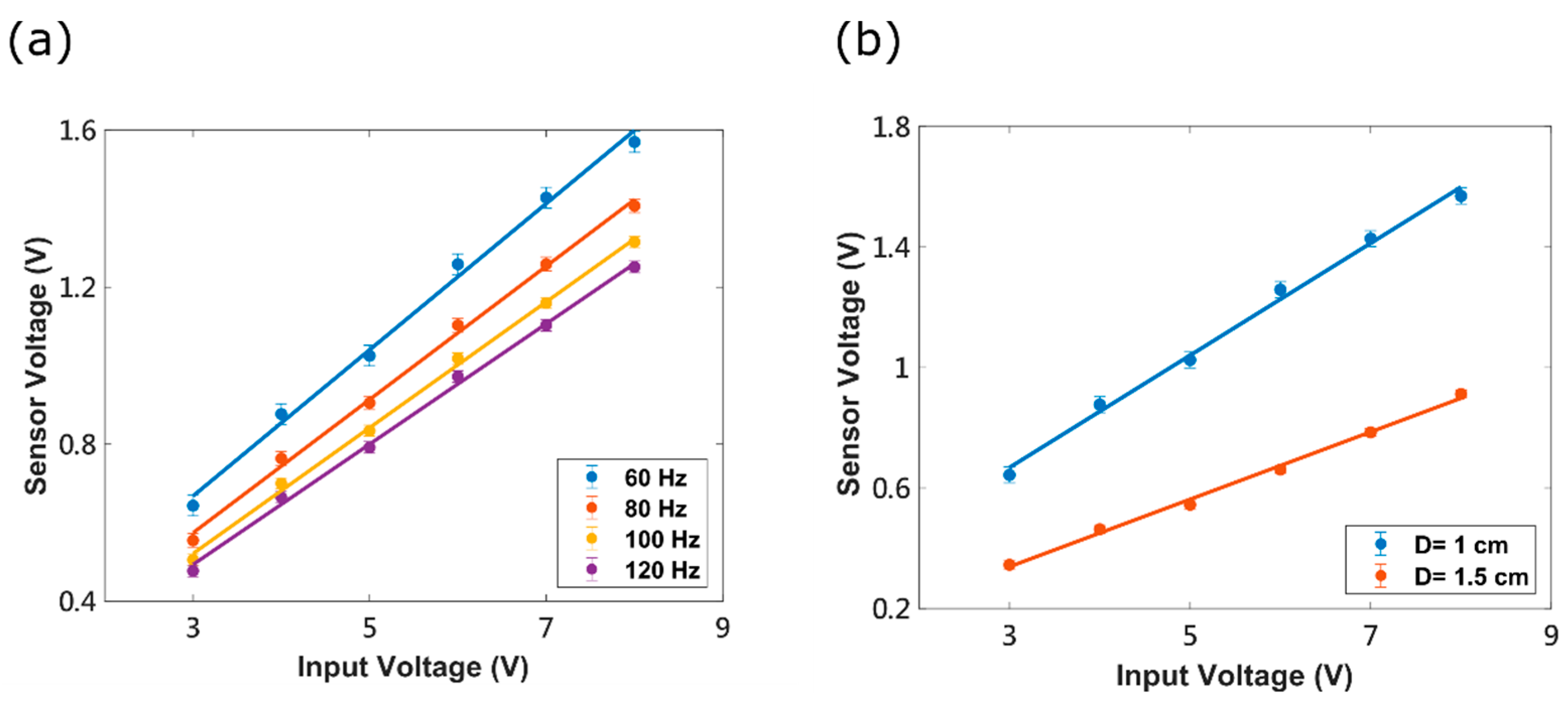
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Savitz, D.A. Overview of Epidemiologic Research on Electric and Magnetic Fields and Cancer. Am. Ind. Hyg. Assoc. J. 1993, 54, 197–204. [Google Scholar] [CrossRef] [PubMed]
- Breysse, P.N.; Matanoski, G.M.; Elliott, E.A.; Francis, M.; Kaune, W.; Thomas, K. 60 Hertz Magnetic Field Exposure Assessment for an Investigation of Leukemia in Telephone Lineworkers. Am. J. Ind. Med. 1994, 26, 681–691. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Zhao, S.; Hui, J.; Qin, Q. Passive Super-Low Frequency Electromagnetic Prospecting Technique. Front. Earth Sci. 2017, 11, 248–267. [Google Scholar] [CrossRef]
- Tumanski, S. Induction Coil Sensors—A Review. Meas. Sci. Technol. 2007, 18, R31–R46. [Google Scholar] [CrossRef]
- Tierney, T.M.; Holmes, N.; Mellor, S.; López, J.D.; Roberts, G.; Hill, R.M.; Boto, E.; Leggett, J.; Shah, V.; Brookes, M.J.; et al. Optically Pumped Magnetometers: From Quantum Origins to Multi-Channel Magnetoencephalography. NeuroImage 2019, 199, 598–608. [Google Scholar] [CrossRef]
- Sarreshtedari, F.; Mahboubian, F.; Sardari, M.H. Gradient Spin Echo Enhanced Proton Precession Magnetometer: A Novel System for Field Gradient Measurement. Rev. Sci. Instrum. 2020, 91, 075105. [Google Scholar] [CrossRef]
- Fagaly, R.L. Superconducting Quantum Interference Device Instruments and Applications. Rev. Sci. Instrum. 2006, 77, 101101. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Sun, J.; Li, B.; Przybysz, A.; Kosel, J. Magnetic Sensors-A Review and Recent Technologies. Eng. Res. Express 2021, 3, 022005. [Google Scholar] [CrossRef]
- Willing, S.; Schlage, K.; Bocklage, L.; Ramin Moayed, M.M.; Gurieva, T.; Meier, G.; Röhlsberger, R. Novel Tunnel Magnetoresistive Sensor Functionalities via Oblique-Incidence Deposition. ACS Appl. Mater. Interfaces 2021, 13, 32343–32351. [Google Scholar] [CrossRef]
- Kirtley, J.R.; Ketchen, M.B.; Stawiasz, K.G.; Sun, J.Z.; Gallagher, W.J.; Blanton, S.H.; Wind, S.J. High-resolution Scanning SQUID Microscope. Appl. Phys. Lett. 1995, 66, 1138–1140. [Google Scholar] [CrossRef] [Green Version]
- Lenz, J.E. A Review of Magnetic Sensors. Proc. IEEE 1990, 78, 973–989. [Google Scholar] [CrossRef]
- Rao, Y.J. Recent Progress in Applications of In-fibre Bragg Grating Sensors. Opt. Lasers Eng. 1999, 31, 297–324. [Google Scholar] [CrossRef]
- Biazi, V.; Avellar, L.; Frizera, A.; Leal-Junior, A. Influence of Two-Plane Position and Stress on Intensity-Variation-Based Sensors: Towards Shape Sensing in Polymer Optical Fibers. Sensors 2021, 21, 7848. [Google Scholar] [CrossRef] [PubMed]
- Lazaro, R.; Frizera-Neto, A.; Marques, C.; Castellani, C.E.S.; Leal-Junior, A. FBG-Based Sensor for the Assessment of Heat Transfer Rate of Liquids in a Forced Convective Environment. Sensors 2021, 21, 6922. [Google Scholar] [CrossRef] [PubMed]
- Pereira, K.; Coimbra, W.; Lazaro, R.; Frizera-Neto, A.; Marques, C.; Leal-Junior, A.G. FBG-Based Temperature Sensors for Liquid Identification and Liquid Level Estimation via Random Forest. Sensors 2021, 21, 4568. [Google Scholar] [CrossRef] [PubMed]
- Leal-Junior, A.G.; Coimbra, W.; Marques, C.; Frizera, A. Highly Stretchable Polymer Optical Fiber for Mechanical Sensing in Artificial Tendons: Towards Novel Sensors for Soft Robotics. Actuators 2020, 9, 125. [Google Scholar] [CrossRef]
- Madhav, K.V.; Kumar, K.R.; Srinivas, T.; Asokan, S. Fiber Bragg Grating Magnetic Field Sensor. In Proceedings of the 2006 IEEE Instrumentation and Measurement Technology Conference Proceedings, Sorrento, Italy, 24–27 April 2006; pp. 2042–2044. [Google Scholar]
- He, J.; Yang, S.; Wei, Q. Intensity-Modulated Magnetic Field Sensor Based on Fiber Bragg Grating. AIP Adv. 2019, 9, 105303. [Google Scholar] [CrossRef]
- Sheng, H.-J.; Fu, M.-Y.; Chen, T.-C.; Liu, W.-F.; Bor, S.-S. A Lateral Pressure Sensor Using a Fiber Bragg Grating. IEEE Photonics Technol. Lett. 2004, 16, 1146–1148. [Google Scholar] [CrossRef]
- Rao, Y.-J. In-Fibre Bragg Grating Sensors. Meas. Sci. Technol. 1997, 8, 355–375. [Google Scholar] [CrossRef]
- Meyers, M.A.; Chawla, K.K. Mechanical Behavior of Materials, 2nd ed.; Cambridge University Press: Cambridge, UK, 2009; ISBN 978-0-521-86675-0. [Google Scholar]
- Kwon, M.; Jung, J.; Jang, T.; Sohn, S. Magnetic Forces between a Magnet and a Solenoid. Phys. Teach. 2020, 58, 330–334. [Google Scholar] [CrossRef]
- Quintero, S.; Braga, A.; Weber, H.; Bruno, A.; Araújo, J. A Magnetostrictive Composite-Fiber Bragg Grating Sensor. Sensors 2010, 10, 8119–8128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, Y.; Yang, M.; Xu, G.; Yuan, Y. Magnetic Field Sensor Based on Fiber Bragg Grating with a Spiral Microgroove Ablated by Femtosecond Laser. Opt. Express 2013, 21, 17386. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Or, S.W.; Tam, H.Y. Magnetostrictive Composite–Fiber Bragg Grating (MC–FBG) Magnetic Field Sensor. Sens. Actuators Phys. 2012, 173, 122–126. [Google Scholar] [CrossRef]
- Chen, M.; Zhao, Y.; Lv, R.; Xia, F. Hybrid MEFPI/FBG Sensor for Simultaneous Measurement of Strain and Magnetic Field. Opt. Fiber Technol. 2017, 39, 32–36. [Google Scholar] [CrossRef]
- Zhang, C.; Li, H.; Zhuo, Z.; Dugnani, R.; Xue, W.; Zhou, Y.; Chen, Y.; Liu, H. Characterization of the Damping and Mechanical Properties of a Novel (ZnSnO3/PVDF)@PPy Nanofibers/EP Composite. RSC Adv. 2017, 7, 37130–37138. [Google Scholar] [CrossRef] [Green Version]
- Celina, M.C. Review of Polymer Oxidation and Its Relationship with Materials Performance and Lifetime Prediction. Polym. Degrad. Stab. 2013, 98, 2419–2429. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Huang, S.-Y.; Lin, C.-Y.; Liu, W.-F. A Low-Frequency Magnetic Field Sensor Based on Fiber Bragg Gratings. Photonics 2022, 9, 102. https://doi.org/10.3390/photonics9020102
Chen J, Huang S-Y, Lin C-Y, Liu W-F. A Low-Frequency Magnetic Field Sensor Based on Fiber Bragg Gratings. Photonics. 2022; 9(2):102. https://doi.org/10.3390/photonics9020102
Chicago/Turabian StyleChen, Jeson, Si-Yu Huang, Cheng-Yu Lin, and Wen-Fung Liu. 2022. "A Low-Frequency Magnetic Field Sensor Based on Fiber Bragg Gratings" Photonics 9, no. 2: 102. https://doi.org/10.3390/photonics9020102
APA StyleChen, J., Huang, S.-Y., Lin, C.-Y., & Liu, W.-F. (2022). A Low-Frequency Magnetic Field Sensor Based on Fiber Bragg Gratings. Photonics, 9(2), 102. https://doi.org/10.3390/photonics9020102