Bessel-Beam Single-Photon High-Resolution Imaging in Time and Space


 and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
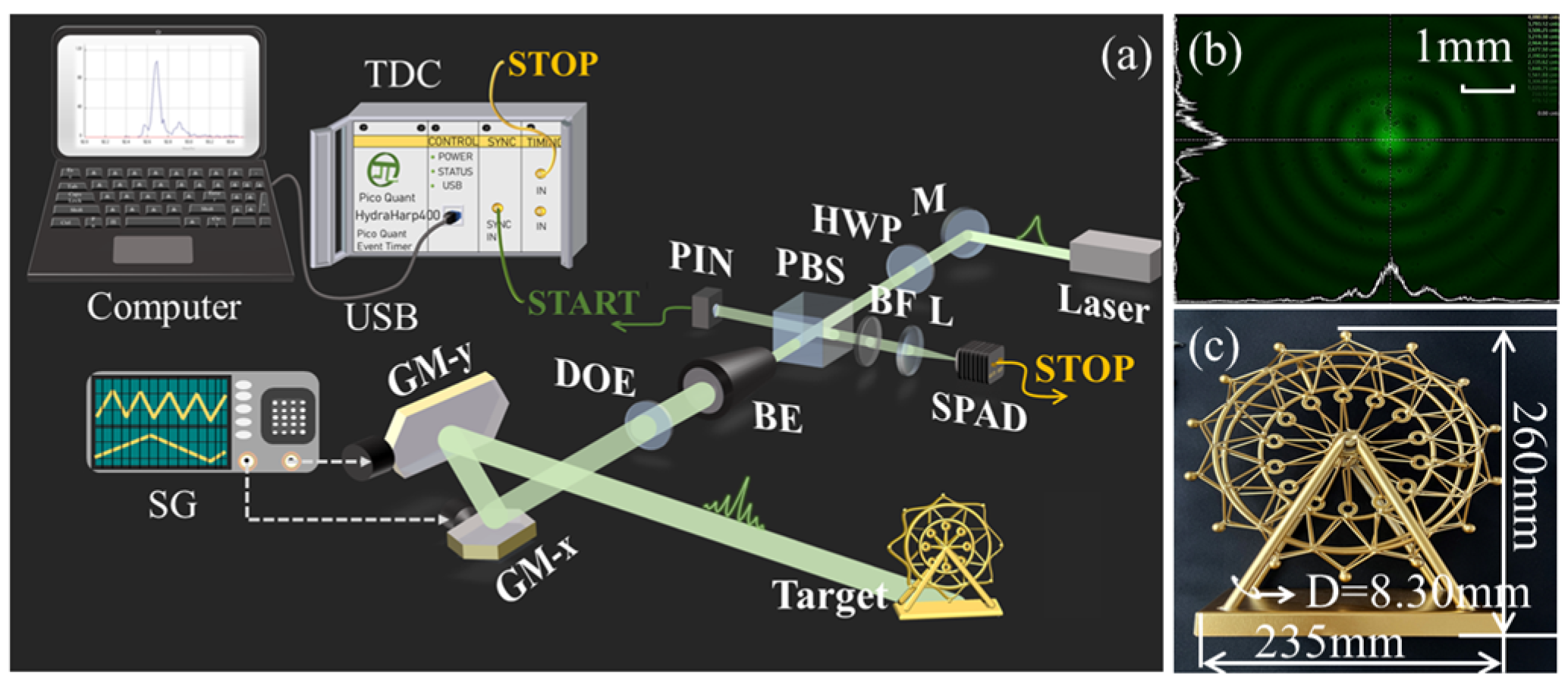
2. The Bessel-Beam Single-Photon Imaging System with Picosecond Resolution
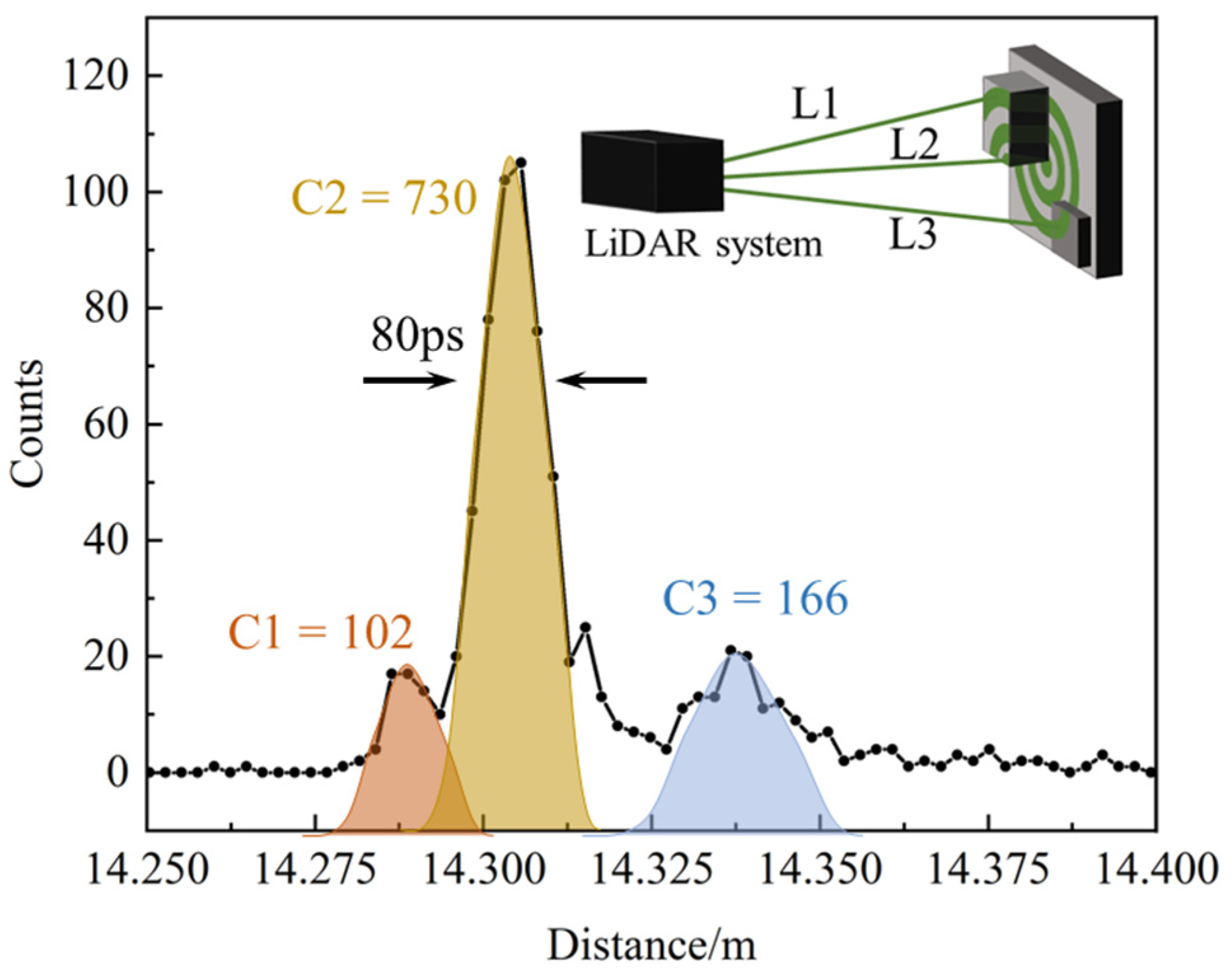
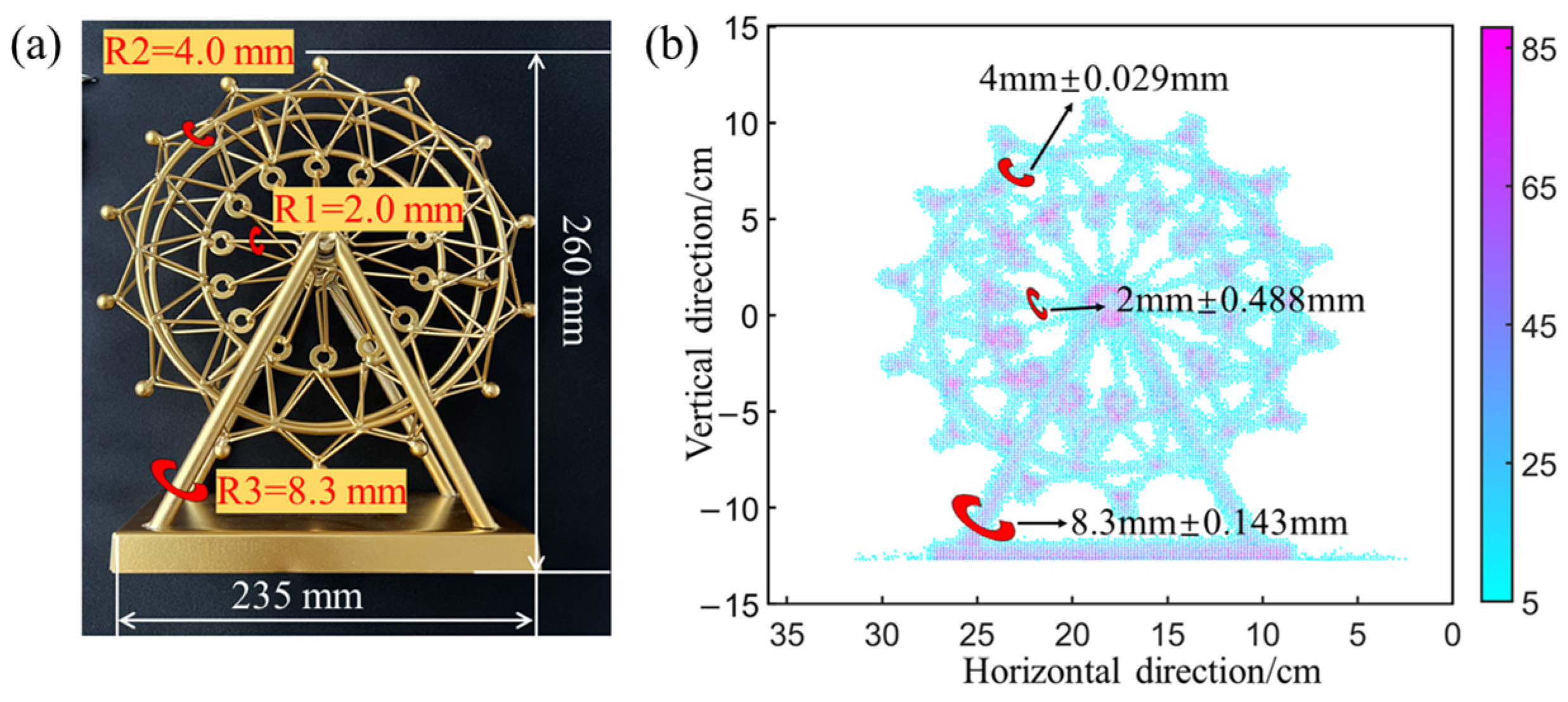
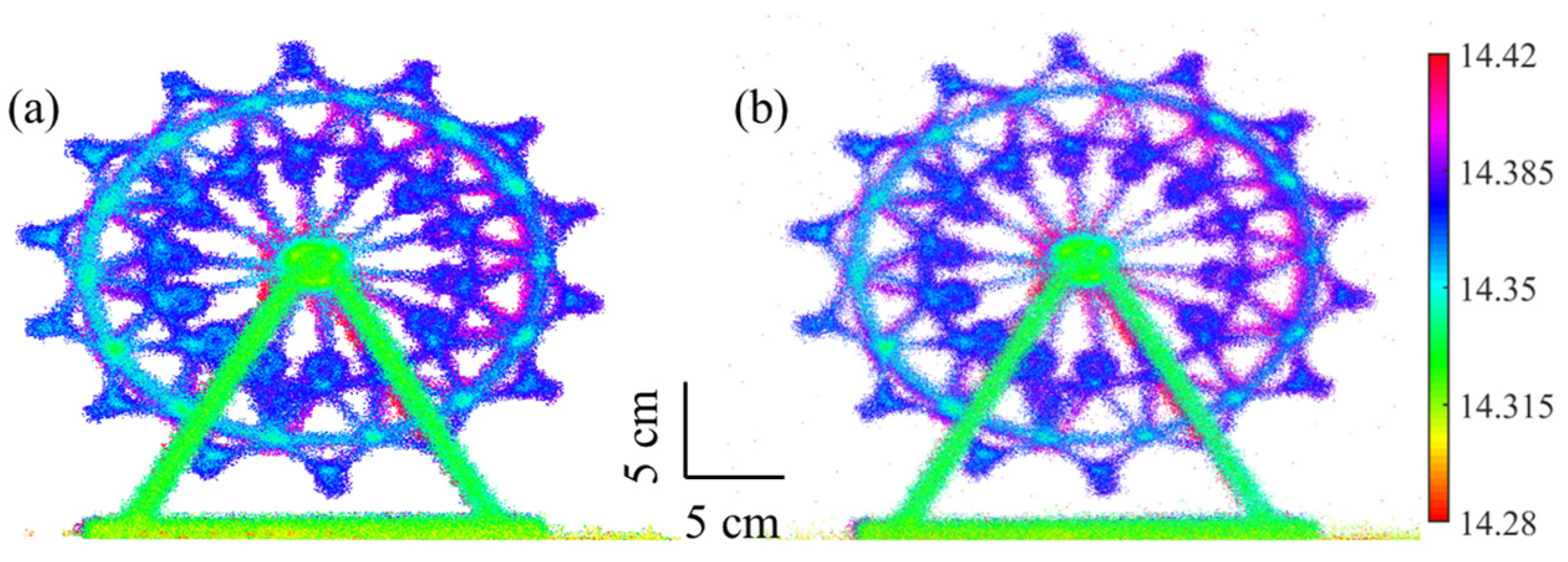
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Notebaert, B.; Verstraeten, G.; Govers, G. Qualitative and quantitative applications of LiDAR imagery in fluvial geomorphology. Earth Surf. Proc. Land. 2009, 34, 217–231. [Google Scholar] [CrossRef]
- McKean, J.; Nagel, D.; Tonina, D. Remote sensing of channels and riparian zones with a narrow-beam aquatic-terrestrial LiDAR. Remote Sens. 2009, 1, 1065–1096. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J.; Nelson, J.M. Mapping river bathymetry with a small footprint green LiDAR: Applications and challenges. J. Am. Water Resour. As. 2013, 49, 183–204. [Google Scholar] [CrossRef]
- Basak, K.; Manjunatha, M.; Dutta, P.K. Review of laser speckle-based analysis in medical imaging. Med. Biol. Eng. Comput. 2012, 50, 547–558. [Google Scholar] [CrossRef]
- Tabatabai, H.; Oliver, D.E.; Rohrbaugh, J.W. Novel applications of laser doppler vibration measurements to medical imaging. Sens. Imaging 2013, 14, 13–28. [Google Scholar] [CrossRef]
- Cole, J.M.; Wood, J.C.; Lopes, N.C. Laser-wakefield accelerators as hard x-ray sources for 3D medical imaging of human bone. Sci. Rep.-UK 2015, 5, 13244. [Google Scholar] [CrossRef] [PubMed]
- Chamseddine, M.; Rambach, J.; Stricker, D. Ghost target detection in 3d radar data using point cloud based deep neural network. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Ussyshkin, V.; Theriault, L. Airborne LiDAR: Advances in discrete return technology for 3D vegetation mapping. Remote Sens. 2011, 3, 416–434. [Google Scholar] [CrossRef]
- Oshio, H.; Asawa, T.; Hoyano, A. Estimation of the leaf area density distribution of individual trees using high-resolution and multi-return airborne LiDAR data. Remote Sens. Environ. 2015, 166, 116–125. [Google Scholar] [CrossRef]
- Liu, W.; Chen, S.; Hauser, E. LiDAR-based bridge structure defect defection. Exp. Tech. 2011, 35, 1. [Google Scholar] [CrossRef]
- Qiu, Q.; Lau, D. A novel approach for near-surface defect detection in FRP-bonded concrete systems using laser reflection and acoustic-laser techniques. Constr. Build Mater. 2017, 141, 553–564. [Google Scholar] [CrossRef]
- Bhatt, P.M.; Malhan, R.K.; Rajendran, P. Image-based surface defect detection using deep learning: A review. J. Comput. Inf. Sci. Eng. 2021, 21, 040801. [Google Scholar] [CrossRef]
- Melotti, G.; Premebida, C.; Gonçalves, N.M. Multimodal CNN pedestrian classification: A study on combining LiDAR and camera data. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Caltagirone, L.; Bellone, M.; Svensson, L. LiDAR–camera fusion for road detection using fully convolutional neural networks. Robot. Auton. Syst. 2019, 111, 125–131. [Google Scholar] [CrossRef]
- Asvadi, A.; Garrote, L.; Premebida, C. Multimodal vehicle detection: Fusing 3D-LiDAR and color camera data. Pattern. Recogn. Lett. 2018, 115, 20–29. [Google Scholar] [CrossRef]
- Xue, R.; Kang, Y.; Zhang, T. Sub-pixel scanning high-resolution panoramic 3D imaging based on a SPAD array. IEEE Photonics J. 2021, 13, 1–6. [Google Scholar] [CrossRef]
- Luo, W.; Zhang, Y.; Feizi, A. Pixel super-resolution using wavelength scanning. Light-Sci. Appl. 2016, 5, 16060. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.P.; Huang, X.; Jiang, P.Y. Super-resolution single-photon imaging at 8.2 kilometers. Opt. Express 2020, 28, 4076–4087. [Google Scholar] [CrossRef]
- Fahrbach, F.O.; Simon, P.; Rohrbach, A. Microscopy with self-reconstructing beams. Nat. Photonics 2010, 4, 780–785. [Google Scholar] [CrossRef]
- Shi, H.T.; Qi, H.Y.; Shen, G.Y. High-resolution underwater single-photon imaging with Bessel beam illumination. IEEE J. Sel. Top. Quant. 2022, 28, 8300106. [Google Scholar] [CrossRef]
- Shi, H.T.; Shen, G.Y.; Qi, H.Y. Noise-tolerant Bessel-beam single-photon imaging in fog. Opt. Express 2022, 30, 12061–12068. [Google Scholar] [CrossRef]
- Niu, L.; Wang, K.; Yang, Y. Diffractive elements for zero-order Bessel beam generation with application in the terahertz reflection imaging. IEEE Photonics J. 2018, 11, 1–12. [Google Scholar] [CrossRef]
- Shen, G.Y.; Zheng, T.X.; Li, Z.H. High-speed airborne single-photon LiDAR with GHz-Gated single-photon detector at 1550 nm. Opt. Laser. Technol. 2021, 141, 107109. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, H.; Li, Z.; Wang, Y.; Chen, X.; Pan, H.; Wu, E.; Wu, G. Bessel-Beam Single-Photon High-Resolution Imaging in Time and Space. Photonics 2024, 11, 704. https://doi.org/10.3390/photonics11080704
Qi H, Li Z, Wang Y, Chen X, Pan H, Wu E, Wu G. Bessel-Beam Single-Photon High-Resolution Imaging in Time and Space. Photonics. 2024; 11(8):704. https://doi.org/10.3390/photonics11080704
Chicago/Turabian StyleQi, Huiyu, Zhaohui Li, Yurong Wang, Xiuliang Chen, Haifeng Pan, E Wu, and Guang Wu. 2024. "Bessel-Beam Single-Photon High-Resolution Imaging in Time and Space" Photonics 11, no. 8: 704. https://doi.org/10.3390/photonics11080704
APA StyleQi, H., Li, Z., Wang, Y., Chen, X., Pan, H., Wu, E., & Wu, G. (2024). Bessel-Beam Single-Photon High-Resolution Imaging in Time and Space. Photonics, 11(8), 704. https://doi.org/10.3390/photonics11080704