Abstract
Microcantilever arrays are valuable tools for detecting minute physical and chemical changes. Traditional microcantilever array systems, including our previous work utilizing multiple laser arrays, frequently encounter high complexity, significant costs, and increased noise caused by laser switching. This study introduces a refraction-based laser scanning system that significantly mitigates these issues by employing a rotating glass optical block for multiplex scanning. This innovative approach not only simplifies the scanning process by eliminating the need to move the laser source or the microcantilever array but also enhances scanning speed and reduces noise, as demonstrated by our experiments. Overall, this research implements a new optical scanning strategy for microcantilever array systems, which is promising due to its direct application potential as it paves the way for more accurate, high-performing, and cost-effective sensing solutions.
1. Introduction
Since its development, the study and application of microcantilever technology have grown extensively [1,2,3,4,5]. This technology’s basic principle lies in measuring the bending of a microcantilever, which happens when a specific substance attaches to its surface [3,4]. The bending of the microcantilever is commonly detected through the optical beam deflection technique by observing the position of the reflected laser spot to identify movements of the microcantilever [4,5].
Microcantilever systems have been widely applied in physical and physicochemical detection, such as pH sensing [6] and explosive detection [7]. The ability of these systems to capture antigens through a single layer of molecules, formed by self-assembling monolayer (SAM) processes [3,8,9], has sparked significant interest. SAM-functionalized microcantilevers enable precise interactions with different chemicals, making them highly valuable for biochemical detection [10,11,12,13,14,15,16,17,18,19]. Microcantilever biosensors have been successfully employed in various biological applications, including DNA hybridization [8], pesticide detection [15], biomarker transcript detection [16], and oncogenic exosome detection [13].
To address the limitations of single-microcantilever systems, researchers have developed designs incorporating multiple microcantilevers in an array format [20,21,22,23,24,25,26]. These systems enable differential measurements, where some cantilevers are functionalized for sensing while others serve as reference cantilevers. By subtracting the signals of the sensing and reference cantilevers, environmental noise and drift can be effectively canceled out, isolating the true reaction signal. Furthermore, using multiple cantilevers for each analyte provides replicate measurements, improving the statistical reliability of the results.
Microcantilever array systems commonly employ either multi-laser time multiplexing [20,21,22] or single-laser sequential scanning [23,24,25] to address the challenge of light spot merging on the detector. These strategies are necessary because detectors are typically limited to identifying only one light spot at a time, and the reflected light spots from multiple cantilever tips may overlap on the detector. However, the multi-laser approach leads to temporary laser instability whenever lasers are switched [22], which affects the system’s steadiness. Although waiting for the laser to stabilize can improve the system’s stability, waiting times typically need to exceed 0.2 s, which undoubtedly reduces the system’s bandwidth. Moreover, even after waiting, the noise level remains relatively high. On the other hand, strategies that involve moving either the light source or the microcantilever container require precise mechanical structures [23,25]. These mechanical movements typically have a significant impact on bandwidth reduction. Furthermore, to achieve high repeatability, expensive, precise, and low backlash moving mechanisms are necessary, which undoubtedly increases the difficulty of implementing multi-channel microcantilever systems.
In this work, we develop a refraction-based laser scanning microcantilever array system. The system uses a stepping motor to rotate a refractive glass block to change the position of the system’s laser irradiation point. To produce sufficient displacement, the optical block needs to rotate at a large angle. The system offers several key advantages: (1) the substantial rotation needed for precise adjustments leads to greater displacement resolution and minimizes positioning errors, significantly reducing jitter; (2) keeping the system’s semiconductor laser on continuously decreases spot jitter, thus cutting down noise and reducing the system’s response time; (3) the scanning mechanism’s ability to support flexible distances and channel numbers increases the system’s adaptability; and (4) leveraging commonly available stepper motors makes our system affordable, scalable, and easier to integrate into different platforms, which differs from more elaborate systems designed to eliminate backlash.
2. Principle and Method
2.1. Principle of Refraction-Based Scanning
This work implements a refraction-based scanning strategy (Figure 1a), which can realize precise control of the laser position by controlling the rotation of a glass block, thereby achieving sufficient resolution. The essential idea of the proposed system is controlling the laser beam by controlling the rotation of a glass block.
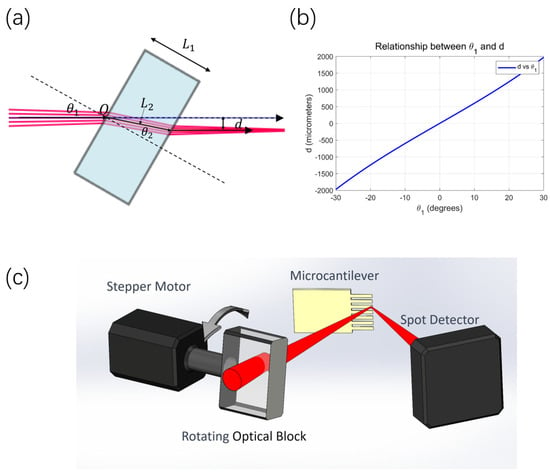
Figure 1.
(a) Principle of refraction-based deflection. (b) Relationship between the incident angle θ₁ and beam shift d for a glass with a thickness of 10 mm and a refractive index of 1.515. (c) Schematic diagram of the experimental setup. The laser light is deflected towards different tips of the microcantilevers by rotating the refractive optical block.
As shown in Figure 1a, the width of the glass block is , the incident angle is , and the refractive indexes of air and glass are and , respectively. The rotation center has been chosen as point for ease of calculation. According to Snell’s law, the incident angle and refractive angle satisfies the following:
The distance of light traveling in the glass, , satisfies
Thus, the lateral offset, , could be given as
A combination of Equations (1)–(3) yields
By precisely controlling the rotation angle of the glass block, we could precisely control the lateral offset , thereby realizing the scanning of the laser beam. Figure 1b shows the relationship between the incident angle and beam shift d for a glass optical block with a thickness of 10 mm and a refractive index of 1.515.
As shown in Figure 1b, a beam shift of 250 μm is achieved with an incident angle change of only about 4 degrees. Our refractive deflection system focuses on translating the light beam, unlike other reflective optical components, like galvanometric mirrors, which change the tilt angle. When the tilt angle is changed, the specific displacement of the light spot is positively correlated with both the tilt angle and the distance. At a considerable distance, a small angular change can easily lead to a 250 μm displacement, making it more susceptible to drift and insufficient resolution.
Our formula clearly demonstrates that the translation amplitude is primarily related to the rotation angle of the glass block and its thickness, independent of the subsequent optical path. A stepper motor is used to control the rotation angle of the glass block, which is a very common and widely used motor type. By only utilizing its rotational angle characteristics without requiring any other mechanisms that might introduce backlash, we can achieve precise control of the laser beam position. This principle enables us to achieve sufficient resolution and high stability, which motivated our choice of this approach.
2.2. Refractive-Based Laser Scanning Microcantilever Array System
The proposed refractive-based laser scanning microcantilever array system includes five major modules: (1) the laser projection module with a rotating optical block; (2) a microcantilever array chamber; (3) a detection camera and an observation camera; (4) a fluid control system that uses a pump to manage the flow of liquids; and (5) a control module, comprising a computer for monitoring the process and data collection and an ESP32 microcontroller unit (MCU) for motor control based on serial port instructions from the computer. Figure 2a illustrates a schematic diagram of the system and Figure 2b shows the experimental setup.
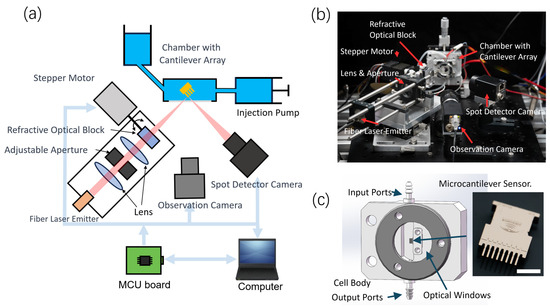
Figure 2.
(a) Schematic diagram of the system. (b) A photograph of the experimental setup. (c) A 3D model of the microcantilever beam chamber is shown, with an inset photograph of the microcantilever sensor with a 1 mm scale bar.
2.2.1. Laser Projection Module
The laser projection module is the key component of the entire system, responsible for launching, deflecting, and focusing the laser onto the tips of multiple microcantilevers. The entire module is built based on a 30 mm cage system. The optical path setup is shown in Figure 1a. The light source is a fiber-coupled semiconductor laser (model LSFLD650p-3, Beijing Lightsensing Technologies Ltd., Beijing, China) with a wavelength of 650 nanometers. In order to achieve effective focusing of the laser beam, the system utilizes two achromatic doublet lenses (model AC254-100-A, Thorlabs, Newton, MA, USA) with a diameter of 25.4 mm and a focal length of 100 mm. The first lens is used to collect the diverging light output from the fiber into parallel light, while the second lens further focuses these parallel light rays. The divergence angle is controlled by an adjustable diaphragm (model SM1D12, Thorlabs, Newton, MA, USA). Then, the laser beam enters the refractive glass block (10 × 20 × 30 mm K9 glass, AliExpress, Hangzhou, China) and is driven by a closed loop nema11 stepper motor (model TST28-31P, Shenzhen Melike Technology Co., Ltd., Shenzhen, China), and finally, it is directed to the tip of the microcantilever in the chamber.
2.2.2. Microcantilever Chamber
The microcantilever chamber is another key component of the experiment, which is mainly used to fix the microcantilever and provide the reaction channel. Figure 2c illustrates the three-dimensional model of the chamber. The chamber is made of non-reactive metal, with a heating plate attached to the back and a 10 K temperature-measuring resistor embedded. The design of the chamber considers optical requirements. The window is coated with an antireflection film, and a 6-degree inclined angle is set relative to the microcantilever to minimize interference from window reflection light to the detector. The upper and lower parts of the chamber are equipped with barbed connectors for connecting silicone tubes. The entire chamber is connected to the external injection pump through silicone tubes. The cantilevers used are OCTO-500 from MICROMOTIVE, with a total of eight microcantilevers, and each is 500 μm long, 90 μm wide, 1 μm thick and has a spacing of 250 μm. The upper surface of the microcantilevers is coated with a 20 nm-thick gold layer, and there is a 2 nm-thick titanium bonding layer on the lower side to ensure stability and reactivity.
2.2.3. Spot Detection Module
The spot detection module detects the position of the reflected laser spot and thereby determines the displacement of the microcantilever tip. The system employs a CMOS industrial camera (mv-ca016, Hikvision, Hangzhou, China) equipped with a Sony IMX296 chip, which provides notable performance with a read noise as low as −5e and a full well capacity of 10ke. An important advantage of using a camera rather than position sensing detectors (PSDs) is the ability to freely set the exposure time, which allows for a significant reduction in signal disturbance due to fluid flow, self-resonance, and electrical grid interference (specifically the 50/60 Hz noise from the power supply), among other factors, through time integration. This approach thereby optimizes positioning accuracy. By installing an adjustable neutral filter, we can control the exposure time to 1/100 s or 1/120 s or multiples of these values to improve performance. The captured image is processed by a self-written Python script for calculating the centroid of the spot.
2.2.4. Fluid Control System
The fluid control system employs an injection pump to regulate the flow of liquids through the microcantilever chamber, aimed at ensuring a steady and controlled liquid environment.
2.2.5. Control Module
The control module controls the rotation of the glass block and the acquisition of the camera, following the serial commands from the computer. The module uses the ESP32 microcontroller as the main control unit, which is responsible for precise angular control of the Nama11 stepper motor, thereby adjusting the deflection of the laser beam. The main control unit is also connected to the camera synchronization interface to ensure the synchronization between rotation and acquisition. Figure 3c illustrates the temporal sequence of the control module.
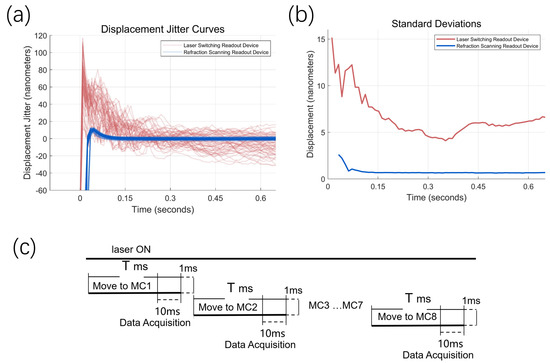
Figure 3.
(a) Displacement curves post-switch of the refraction scanning (blue) and laser switching devices (red). (b) The standard deviation of the displacement. (c) Timing Diagram of Control Operations.
2.3. Control of Rotation Angle
The key to the proposed system is to realize the scanning of multiple microcantilever beams by precisely controlling the rotation angle of the glass block. Therefore, it is necessary to identify the rotation angles of the glass block which precisely emits the laser onto the tips of the microcantilevers. Considering the refractive index in air and in glass, with a glass thickness of 10 mm, the beam shift at different incident angles can be obtained according to Equation (4), as shown in Figure 1b.
As described in Section 2.2.2, the system comprises eight microcantilevers with a scanning range of approximately 2 mm. To meet the operational requirements, the laser beam must be shifted over a range of ±15 degrees. Given the configuration of our system, as illustrated in Figure 1b, rotating the glass block by approximately 4 degrees is necessary to switch the laser to an adjacent microcantilever. The system employs a 2-phase stepper motor with a 32-subdivision setting. For a full 360-degree rotation, the stepper motor requires approximately 6400 pulses (32 subdivisions × 200 steps per revolution). Consequently, switching between adjacent microcantilevers requires about 70 pulses, ensuring high system resolution. It is worth noting that the system resolution could be further enhanced by reducing the thickness of the glass block or increasing the subdivision number of the stepper motor.
2.4. Experimental Procedure
The experiment of the proposed system consists of three steps: system start-up and alignment, data acquisition, and data analysis.
2.4.1. System Start-Up and Alignment
Firstly, the system’s light source and the computer are turned on. The initial alignment of the microcantilevers is realized by manually adjusting the stage. For further alignment, we use a self-written Python script to adjust the motor’s angle based on the camera’s view, ensuring the laser targets each microcantilever accurately. This alignment process involves setting the scan angles for each microcantilever. Once these steps are completed, we proceed to the stage of data acquisition.
2.4.2. Data Acquisition
After the system alignment, the data acquisition stage begins. The laser beam is guided by the refractive glass block to the tip of each microcantilever beam in turn, and the reflected light spot pattern is captured by the CMOS camera. To ensure the consistency and accuracy of the data, the laser exposure sequence and duration corresponding to each microcantilever beam are precisely controlled by the ESP32 MCU unit.
2.4.3. Data Analysis
The light spot images are analyzed by a self-written Python program. The program calculates the centroid of the light spot and converts it into the actual displacement of the microcantilever tip based on the system magnification. In this way, the light spot displacement is linked to the physical or biochemical reaction of the microcantilever surface. In addition, we analyzed the changes in deflection measurements over time to evaluate the stability and accuracy of the scanning system.
3. System Performance Analysis
To evaluate the noise and stability of the microcantilever system, this study focuses on three key aspects: (1) the stability of the spot position within the first 0–5 s after switching channels; (2) the noise spectrum; and (3) the response of the system to step changes in temperature. The reason for analyzing the stability of the spot is to understand the time required for the system to reach stability after channel switching, which is crucial for evaluating the system bandwidth. To carefully evaluate the noise characteristics of the system, the noise spectrum is analyzed by Fourier transform, and the centroid drift between current and previous systems is compared, thus fully understanding the performance of the current system. The temperature response analysis involves applying temperature changes to the microcantilevers, recording their response, and thereby evaluating the sensitivity and resolution of the system.
3.1. Analysis of Channel Switching Time Stability
Classical multiple laser microcantilever systems typically rely on the sequential switching of multiple semiconductor lasers to switch channels. These systems face a key issue: after the semiconductor lasers are turned on, it takes several seconds for their wavelengths and powers to reach a stable state. Our research group’s findings, as indicated in reference [22], demonstrate that fluctuations in laser power and tip positions are common during microcantilever measurements. These fluctuations significantly impact the stability of the microcantilever’s position by affecting the centroid of the light spot reflected from the surface of the microcantilever beam. Our experiments show that various semiconductor lasers exhibit severe fluctuations in the position of the light spot within the first 0.4 s after starting up. Therefore, traditional multi-laser systems usually need to wait for more than 0.4 s to ensure the stability of the laser spot. Figure 3c illustrates our scanning strategy, wherein the T waiting time corresponds to the initial wait time discussed here.
Compared with previous technologies, the proposed refraction-based system exhibits significant advantages in stability. This design enables the laser to continuously turn on, ensuring wavelength stability. This continuous emission mode reduces fluctuations caused by the laser turning off and restarting, thereby enhancing the stability of the spot centroid. In cases where channel switching is required, the deflector achieves rapid stabilization of the spot centroid through rapid mechanical movement. This not only reduces system noise but also significantly improves system response speed and bandwidth.
To verify this, two experiments were conducted to measure the changes in the centroid of the reflected spot over time after switching the microcantilever. In the first experiment, we deflected the laser to the microcantilever tip using the refractive glass block and then tested the motion of the centroid of the reflected spot; this setup aimed to investigate the stability of the refraction-based scanning strategy. In contrast, the second experiment studies the stability of the reflected spot on the same device corresponding to directly turning on the laser; for this, we pre-aimed the microcantilever tip, turned off the laser, and then turned it on again using electronic switches (MOSFETs); hence, we could test the inherent stability of the laser spot due to laser switching. The sampling frequency for both experiments was set to 100 Hz, and each experiment was repeated one hundred times to ensure reliability and consistency in the observed phenomena. These methodologies provided a comprehensive comparison between the effects of laser deflection and direct laser switching on the centroid stability of the reflected spot from the microcantilever tip.
The experimental results are shown in Figure 3. Figure 3a illustrates the displacements caused by channel switching of these one hundred experiments. The horizontal axis represents the time (in seconds) after turning on or switching the laser, and the vertical axis represents the calculated position of the beam tip (in nanometers). The red curve shows the position change in the spot center after turning on a traditional semiconductor laser, while the blue curve represents the position change in the spot center after rotating the motor. Figure 3b illustrates the standard deviation of displacement jitter of the one hundred experiments.
We observed that in the proposed refraction-based system, it takes no more than 0.08 s for the spot to stabilize with a standard deviation of less than 1 nm, which is significantly better than the laser switching system, demonstrating the potential advantages of our system in high-precision microcantilever beam position measurement.
3.2. Noise Analysis and Stability Assessment
To evaluate the performance and stability of the developed single-laser-scanning system, we collected the noise signal of the system without external excitation. In the experiment, the reaction chamber was filled with PBS buffer, and data were collected at a constant temperature of 25 degrees Celsius. The microcantilever used was also OCTO-500, which was specifically designed for static measurement.
We first assessed the light spot centroid position over a 10 s period with and without the deflector mechanism (Figure 4a). The two curves exhibited similar displacement magnitudes, indicating that the addition of the stepped deflector had minimal impact on the centroid position on the detector. Furthermore, we demonstrated the system’s dynamic positioning repeatability during the deflector switching cycle (10 s:9 s at the desired position, 1 s away). The light spot centroid position showed minimal disturbance to centroid detection and a highly consistent overall trend, despite raw curve discontinuities (Figure 4b).
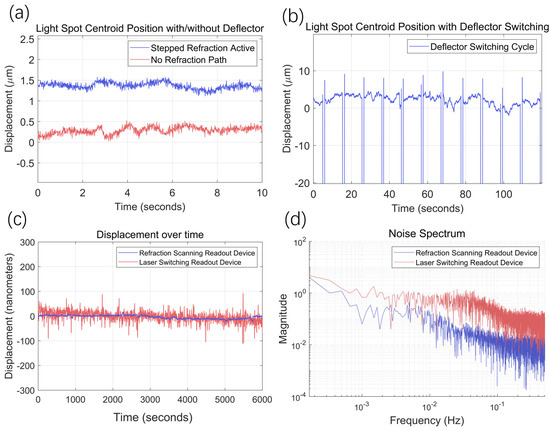
Figure 4.
(a) Plot of the light spot centroid position on the detector over 10 s with and without the deflector. Similar displacement magnitudes indicate the minimal impact of the stepped deflector on the centroid position. (b) Demonstration of the system’s dynamic positioning repeatability during the deflector switching cycle (10 s:9 s at the desired position, 1 s away). Minimal disturbance to centroid detection and highly consistent overall trend maintained, despite raw curve discontinuities. (c) Displacement of the cantilever beam tip over time when comparing the noise levels between the refraction scanning readout device and a laser switching readout device at rest. (d) Noise spectrum of the two devices across different frequencies.
Next, we compared this system with the previous microcantilever system (refer to the research by Mei and Zhang [13,22]). The testing time of both systems was six thousand seconds, and the sampling frequency was once per second. The measured displacements are shown in Figure 4c. The collected data were zero padded at both ends before Fourier transform to improve the accuracy of analysis, and the noise spectrum is shown in Figure 4d.
The noise of the new system is significantly lower than the classical one. Specifically, within the frequency range of 0.01 Hz to 1 Hz, the noise level of the new system is more than 90% lower than that of the old system. These findings demonstrate the improved stability and reduced noise achieved by the single-laser-scanning system compared to the previous microcantilever system.
3.3. Thermal Response of the Microcantilever Systems
To evaluate the sensitivity and stability of the microcantilever system’s response to temperature changes, we carried out thermal response experiments. As the temperature increases, the microcantilever bends towards the silicon substrate due to the differing thermal expansion coefficients of the gold and silicon layers, serving as a measure of temperature sensitivity. Identical microcantilevers, when subjected to the same temperature changes in different systems, exhibit consistent responses. This consistency allows us to use temperature variations to investigate the sensitivity of various systems and their noise characteristics.
During the experimental procedure, a PID thermostat with a 0.01-degree resolution was employed to regulate the chamber’s temperature. The experiment began at 25 degrees Celsius, with the temperature incrementally increasing by 1 degree Celsius every 4 min until reaching 28 degrees Celsius. The temperature was then reset to the initial value, and the experiment was repeated. By assessing the bending degree and noise of a specific model cantilever beam under a 1-degree Celsius temperature change, we made comparisons with equipment previously used by our research group [26], specifically utilizing the same heating chamber as in our current system.
The measurement displacements are shown in Figure 5a. Considering a signal-to-noise ratio of 3, we determined the signal resolution. The refraction-based scanning system achieved a high resolution of 0.006 degrees.
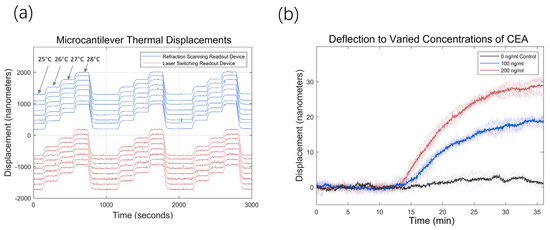
Figure 5.
Performance of proposed system in physical and chemical sensing. (a) Displacement of microcantilevers caused by thermal stages, captured by the refraction scanning (blue lines) and laser switching readout (red lines) devices. (b) The deflection responses of the microcantilever to carcinoembryonic antigen (CEA) concentrations of 0 ng/mL (control), 100 ng/mL, and 200 ng/mL. Lighter colors represent the deflection of individual microcantilevers, while darker colors indicate the average deflection.
3.4. Biochemical Monitoring of Carcinoembryonic Antigen (CEA)
As a protein biomarker whose expression level rises in many types of cancer, the detection of CEA is significant for early cancer diagnosis and treatment monitoring. Continuing from our previous work where we used a microcantilever beam device to detect carcinoembryonic antigen (CEA) (see reference [27]), in this study, we further investigate CEA detection using this newly developed biochemical detection device. The CEA aptamer sequence used in the experiment is 5′-SH-(CH2)6-ATG AAT TTG TGG AAG AAG ACG AAT AAG TTA AGT AG-3′, with thiol modification techniques employed to achieve surface functionalization of the microcantilever.
Surface treatment of the microcantilever included Piranha dip cleaning to remove potential surface contaminants, followed by functionalization treatment using 198 μL of 5 μM thiol-modified CEA aptamer solution to ensure specific recognition of CEA. To minimize nonspecific adsorption, the treated microcantilevers were further treated with 200 μL of a 2 mM mercapto-hexanol (MCH) solution for blocking. During detection, the sample dilution and system flow phase utilized a phosphate-buffered saline (PBS) containing 10 mM PO₄3− and 0.9% (w/w) NaCl, with the pH maintained at 7.4 to simulate physiological conditions.
The experimental results were meticulously recorded in Figure 5b, which presents data processed through median filtering. The results indicate that a 100 ng/mL CEA sample could cause approximately 19 nm of microcantilever deflection, and a 200 ng/mL CEA sample could cause about 28 nm of deflection. These experimental findings demonstrate a trend consistent with previous studies [27]. Considering the low noise level of our current device, the potential and advantages of this device in the field of biochemical detection are confirmed.
4. Discussion
This study introduces a refractive-based laser scanning cantilever beam array system. The evaluation of this system focuses on scanning speed, noise level, and the detection capability of excitation responses, revealing its relative advantages in these areas.
A significant characteristic of the system is its rapid channel switching capability, achieving speeds of less than 0.1 s. This quick response exceeds the performance of traditional multi-laser-switching systems, which are typically influenced by startup noise.
Compared to semiconductor laser systems that require switching, the noise level is significantly reduced in systems utilizing continuously operating lasers combined with rotating lens structures, with a noise reduction exceeding 90%.
Moreover, the system’s performance in temperature detection and biochemical detection has confirmed its operational effectiveness.
5. Conclusions
In this study, a refraction-based laser scanning microcantilever array system with precise rotation control of a glass optical block for enhanced scanning capabilities is introduced. The evaluation of the system’s metrological performance reveals substantial advantages over traditional multi-laser microcantilever arrays, including a noise reduction of over 90% and channel switching times under 0.10 s. The strategic integration of widely available stepper motors to drive the optical block’s rotation is a cornerstone of the system’s design, ensuring both affordability and scalability. These improvements in response time, noise reduction, and accessibility may contribute to the development of more efficient microcantilever sensing technologies.
Author Contributions
W.X.: conceptualization, methodology, software, validation, formal analysis, investigation, visualization, writing—original draft, and resources; Y.S.: writing—review and editing and resources; Q.Z.: writing—review and editing and funding acquisition. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Natural Science Foundation of China (Grant Nos. 32061160475 and 12232017).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors upon request.
Acknowledgments
The authors gratefully acknowledge the financial support provided by the National Natural Science Foundation of China. Specific grant details are listed in the Funding section.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Lee, G.U.; Chrisey, L.A.; Colton, R.J. Direct Measurement of the Forces Between Complementary Strands of DNA. Science 1994, 266, 771–773. [Google Scholar] [CrossRef] [PubMed]
- Putman, C.A.J.; De Grooth, B.G.; Van Hulst, N.F.; Greve, J. A detailed analysis of the optical beam deflection technique for use in atomic force microscopy. J. Appl. Phys. 1992, 72, 6–12. [Google Scholar] [CrossRef]
- Berger, R.; Delamarche, E.; Lang, H.P.; Gerber, C.; Gimzewski, J.K.; Meyer, E.; Guntherodt, H.J. Surface Stress in the Self-Assembly of Alkanethiols on Gold. Science 1997, 276, 2021–2024. [Google Scholar] [CrossRef]
- Jeon, S.; Thundat, T. Instant curvature measurement for microcantilever sensors. Appl. Phys. Lett. 2004, 85, 1083–1084. [Google Scholar] [CrossRef]
- Boisen, A.; Dohn, S.; Keller, S.S.; Schmid, S.; Tenje, M. Cantilever-like micromechanical sensors. Rep. Prog. Phys. 2011, 74, 036101. [Google Scholar] [CrossRef]
- Bashir, R.; Hilt, J.Z.; Elibol, O.; Gupta, A.; Peppas, N.A. Micromechanical cantilever as an ultrasensitive pH microsensor. Appl. Phys. Lett. 2002, 81, 3091–3093. [Google Scholar] [CrossRef]
- Senesac, L.; Thundat, T.G. Nanosensors for trace explosive detection. Mater. Today 2008, 11, 28–36. [Google Scholar] [CrossRef]
- Alvarez, M.; Carrascosa, L.G.; Moreno, M.; Calle, A.; Zaballos, A.; Lechuga, L.M.; Martínez-A, C.; Tamayo, J. Nanomechanics of the formation of DNA self-assembled monolayers and hybridization on microcantilevers. Langmuir ACS J. Surf. Colloids 2004, 20, 9663–9668. [Google Scholar] [CrossRef] [PubMed]
- Hansen, K.M.; Thundat, T. Microcantilever biosensors. Methods 2005, 37, 57–64. [Google Scholar] [CrossRef]
- Mistry, K.; Nguyen, V.H.; Arabi, M.; Ibrahim, K.H.; Asgarimoghaddam, H.; Yavuz, M.; Muñoz-Rojas, D.; Abdel-Rahman, E.; Musselman, K.P. Highly Sensitive Self-Actuated Zinc Oxide Resonant Microcantilever Humidity Sensor. Nano Lett. 2022, 22, 3196–3203. [Google Scholar] [CrossRef]
- Xue, C.; Zhao, H.; Liu, H.; Chen, Y.; Wang, B.; Zhang, Q.; Wu, X. Development of sulfhydrylated antibody functionalized microcantilever immunosensor for taxol. Sens. Actuators B Chem. 2011, 156, 863–866. [Google Scholar] [CrossRef]
- Martínez-Martín, D.; Fläschner, G.; Gaub, B.; Martin, S.; Newton, R.; Beerli, C.; Mercer, J.; Gerber, C.; Müller, D.J. Inertial picobalance reveals fast mass fluctuations in mammalian cells. Nature 2017, 550, 500–505. [Google Scholar] [CrossRef]
- Mei, K.; Yan, T.; Wang, Y.; Rao, D.; Peng, Y.; Wu, W.; Chen, Y.; Ren, M.; Yang, J.; Wu, S.; et al. Magneto-Nanomechanical Array Biosensor for Ultrasensitive Detection of Oncogenic Exosomes for Early Diagnosis of Cancers (Small 9/2023). Small 2023, 19, 2370055. [Google Scholar] [CrossRef]
- Lavrik, N.; Sepaniak, M.; Datskos, P. Cantilever transducers as a platform for chemical and biological sensors. Rev. Sci. Instrum. 2004, 75, 2229–2253. [Google Scholar] [CrossRef]
- Alvarez, M.; Calle, A.; Tamayo, J.; Lechuga, L.M.; Abad, A.; Montoya, A. Development of nanomechanical biosensors for detection of the pesticide DDT. Biosens. Bioelectron. 2003, 18, 649–653. [Google Scholar] [CrossRef]
- Zhang, J.; Lang, H.P.; Huber, F.; Bietsch, A.; Grange, W.; Certa, U.; McKendry, R.; Güntherodt, H.J.; Hegner, M.; Gerber, C. Rapid and label-free nanomechanical detection of biomarker transcripts in human RNA. Nat. Nanotechnol. 2006, 1, 214–220. [Google Scholar] [CrossRef]
- Vashist, S.K. A Review of Microcantilevers for Sensing Applications. AZojono J. Nanotechnol. Online 2007, 3, 1–15. [Google Scholar] [CrossRef]
- Basu, A.K.; Basu, A.; Bhattacharya, S. Micro/Nano fabricated cantilever based biosensor platform: A review and recent progress. Enzym. Microb. Technol. 2020, 139, 109558. [Google Scholar] [CrossRef]
- Waggoner, P.S.; Craighead, H.G. Micro- and nanomechanical sensors for environmental, chemical, and biological detection. Lab A Chip 2007, 7, 1238. [Google Scholar] [CrossRef] [PubMed]
- Battiston, F.M.; Ramseyer, J.-P.; Lang, H.P.; Baller, M.K.; Gerber, C.; Gimzewski, J.K.; Meyer, E.; Güntherodt, H.J. A chemical sensor based on a microfabricated cantilever array with simultaneous resonance-frequency and bending readout. Sens. Actuators B Chem. 2001, 77, 122–131. [Google Scholar] [CrossRef]
- Lang, H.P.; Hegner, M.; Gerber, C. Nanomechanical Cantilever Array Sensors. In Springer Handbook of Nanotechnology; Bhushan, B., Ed.; Springer Handbooks; Springer: Berlin/Heidelberg, Germany, 2017; pp. 457–485. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, L.; Li, C.; Wu, S.; Zhang, Q. Microcantilever array instrument based on optical fiber and performance analysis. Rev. Sci. Instrum. 2017, 88, 075007. [Google Scholar] [CrossRef]
- Mertens, J.; Alvarez, M.; Tamayo, J. Real-time profile of microcantilevers for sensing applications. Appl. Phys. Lett. 2005, 87, 234102. [Google Scholar] [CrossRef]
- Martínez, N.F.; Kosaka, P.M.; Tamayo, J.; Ramírez, J.; Ahumada, O.; Mertens, J.; Hien, T.D.; Rijn, C.V.; Calleja, M. High throughput optical readout of dense arrays of nanomechanical systems for sensing applications. Rev. Sci. Instrum. 2010, 81, 125109. [Google Scholar] [CrossRef]
- Alodhayb, A.; Rahman, S.M.S.; Rahman, S.; Georghiou, P.E.; Beaulieu, L.Y. A 16-microcantilever array sensing system for the rapid and simultaneous detection of analyte. Sens. Actuators B Chem. 2016, 237, 459–469. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, H.; Wu, S.; Zhang, Q.; Wu, X. Performance analysis of microcantilever array sensing. Sci. China Technol. Sci. 2017, 60, 1674–1680. [Google Scholar] [CrossRef]
- Rao, D.; Yan, T.; Qiao, Z.; Wang, Y.; Peng, Y.; Tu, H.; Wu, S.; Zhang, Q. Relay-type sensing mode: A strategy to push the limit on nanomechanical sensor sensitivity based on the magneto lever. Nano Res. 2023, 16, 3231–3239. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).