Line-of-Sight Initial Pointing Model of Space Dynamic Optical Network and Its Verification


Abstract
1. Introduction
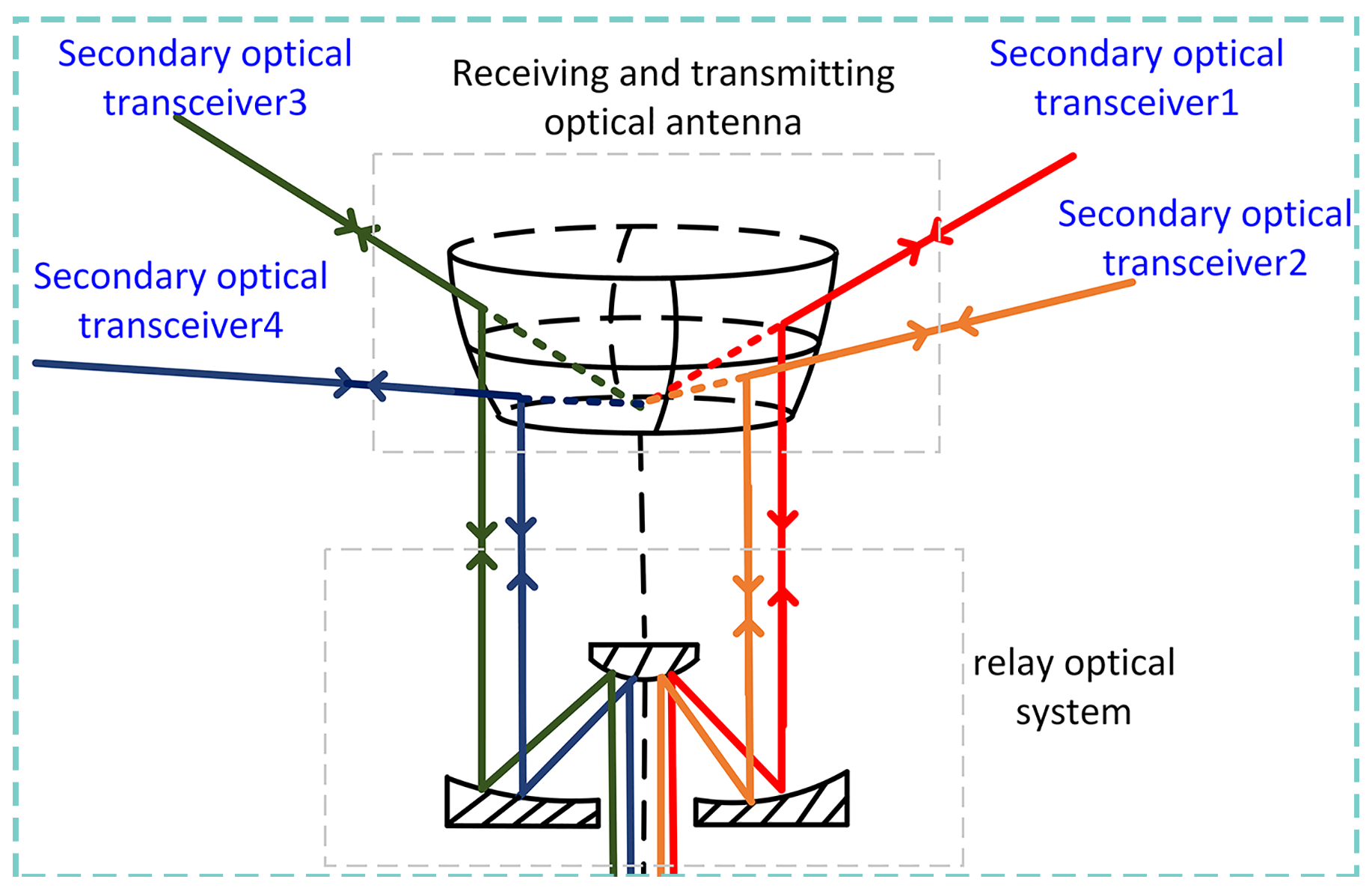
2. Optical Networking System Composition and Working Principle
3. Multi-Link LOS Pointing Model
3.1. The Principle of LOS Pointing
3.1.1. Coordinate System Definition
3.1.2. Coordinate Conversion and Transfer Principle
- Geodetic Coordinate–Rectangular Coordinate Conversion
- 2.
- Matrix transfer principle [9]
3.1.3. Pointing Angle Calculation
3.2. FOU
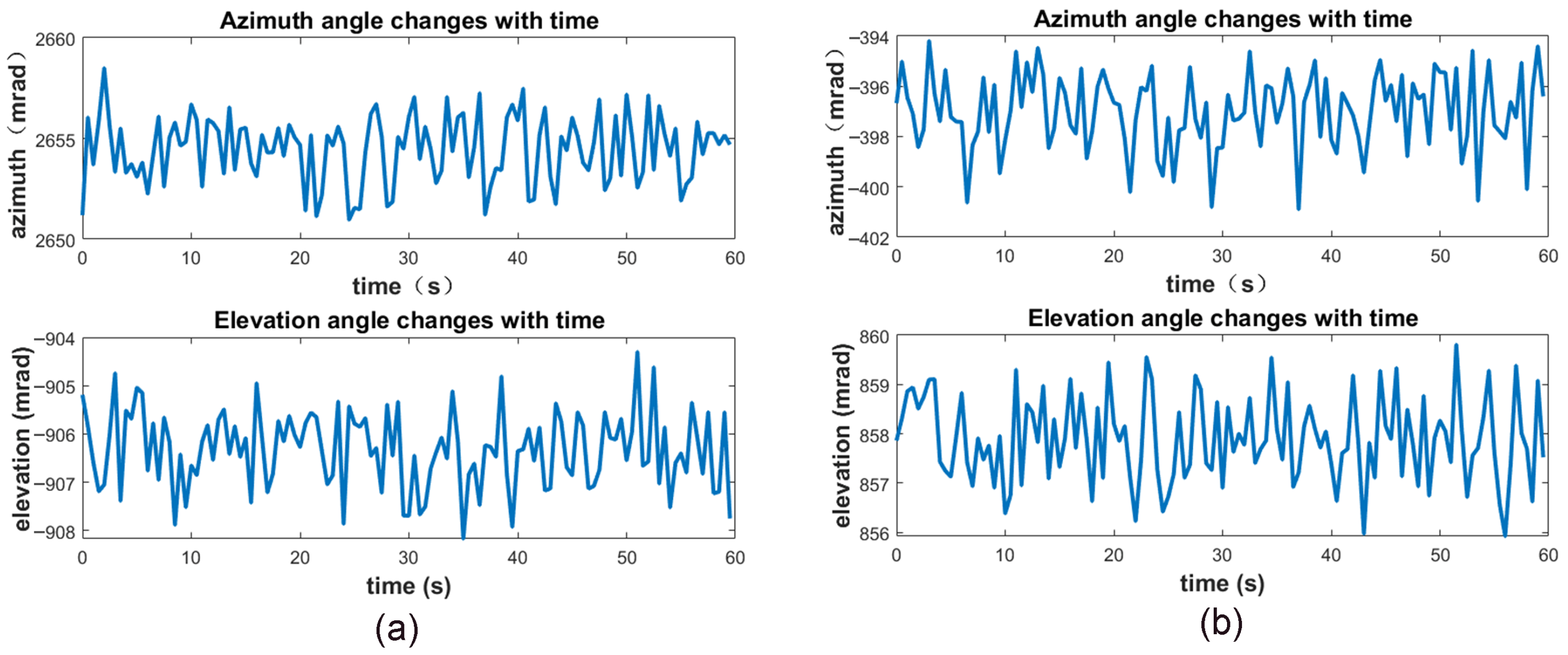
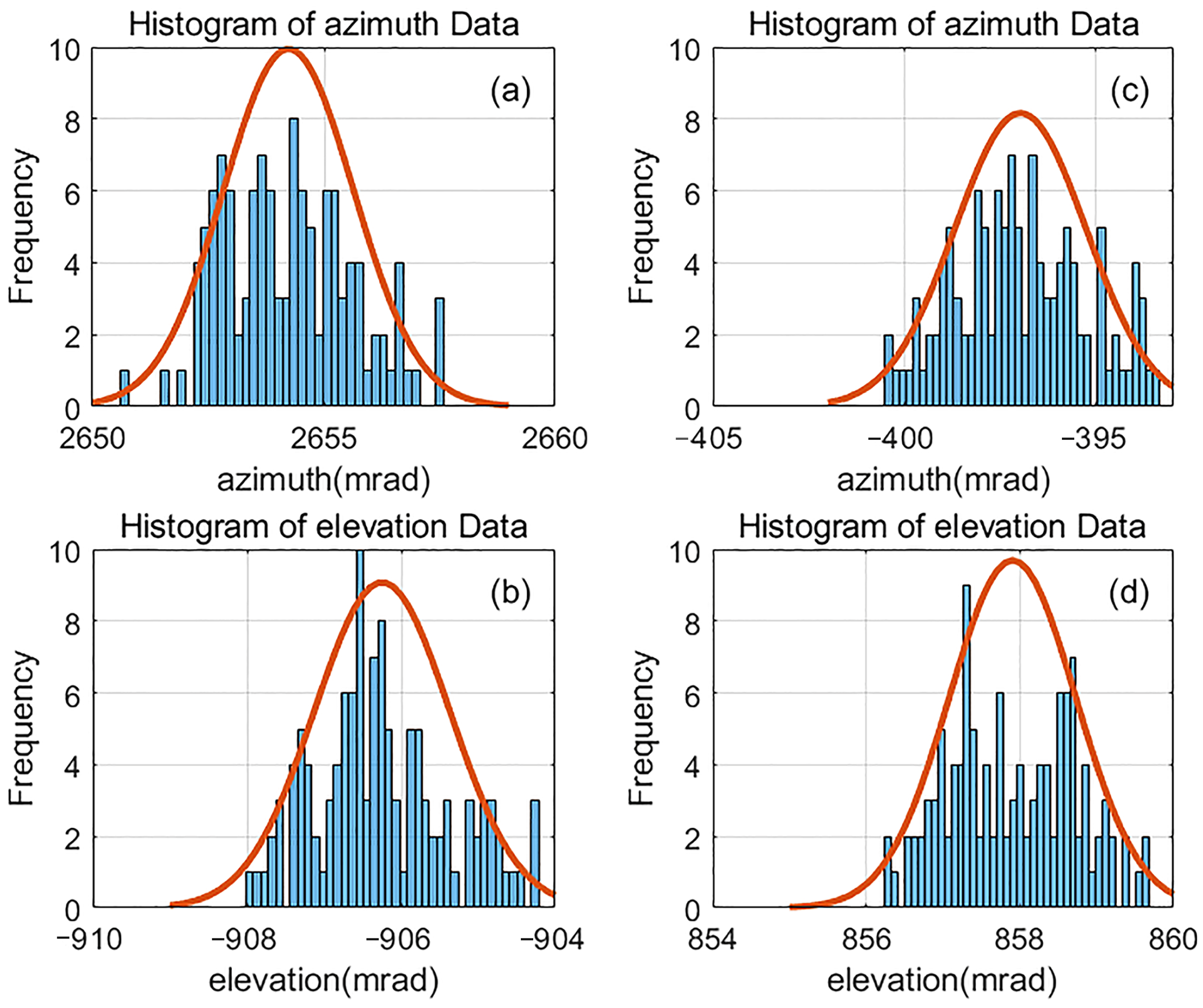
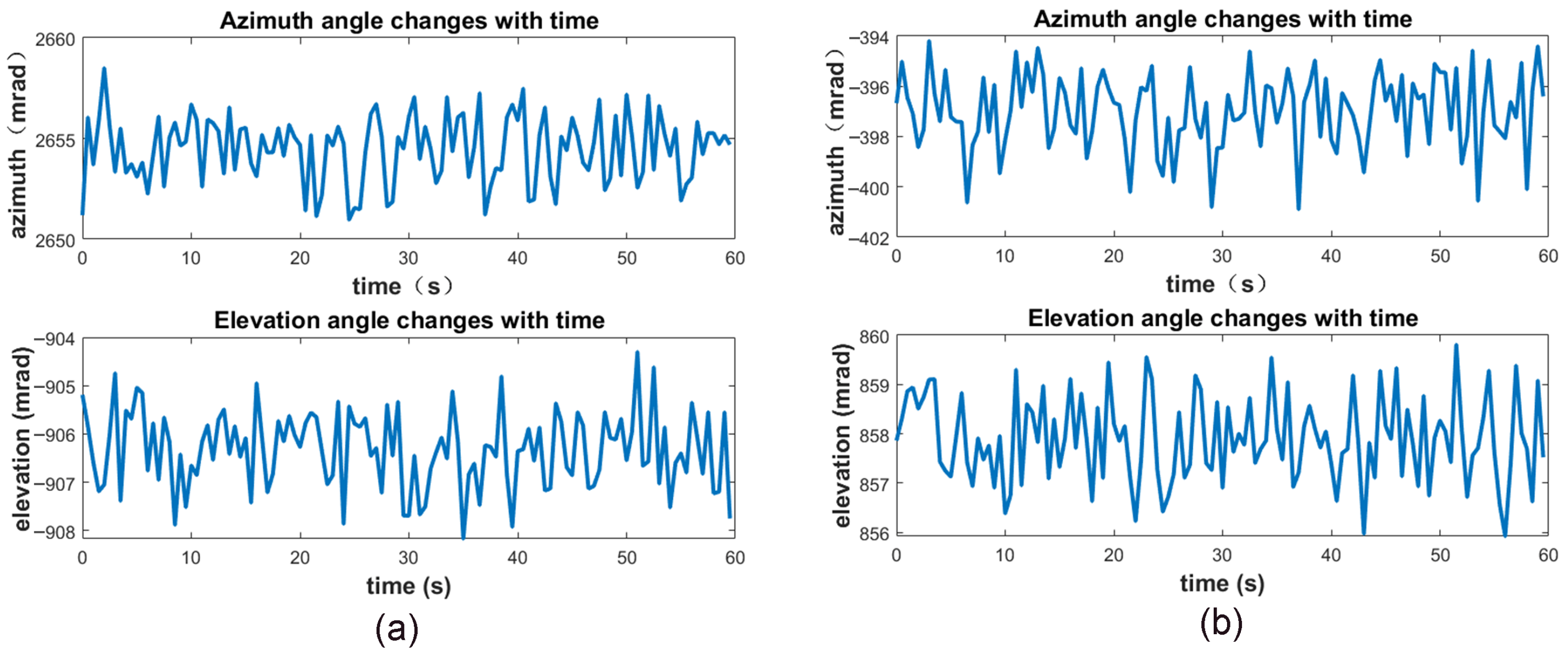
4. Experimental Results and Analysis
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Israel, D.J.; Edwards, B.L.; Staren, J.W. Laser Communications Relay Demonstration (LCRD) update and the path towards optical relay operations. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–6. [Google Scholar]
- Gregory, M.; Heine, F.; Kämpfner, H.; Lange, R.; Lutzer, M.; Meyer, R. Commercial optical inter-satellite communication at high data rates. Opt. Eng. 2012, 51, 031202. [Google Scholar] [CrossRef]
- Kumar, P.; Srivastava, P.K.; Tiwari, P.; Mall, R.K. Chapter 20—Application of GPS and GNSS technology in geosciences. GPS Solut. 2018, 22, 1–14. [Google Scholar]
- McDowell, J.C. The Low Earth Orbit Satellite Population and Impacts of the SpaceX Star link Constellation. Astrophys. J. Lett 2020, 892, L36. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, Y.; Wu, Y.; Hu, W.; Jin, G. The Taiji program: A concise overview. Prog. Theor. Exp. Phys. 2021, 2021, 05A108. [Google Scholar] [CrossRef]
- Kashani, M.A.; Uysal, M.; Kavehrad, M. A Novel Statistical Channel Model for Turbulence-Induced Fading in Free-Space Optical Systems. J. Light. Technol. 2015, 33, 2303–2312. [Google Scholar] [CrossRef]
- Karimi, M.; Nasiri-Kenari, M. BER Analysis of Cooperative Systems in Free-Space Optical Networks. J. Light. Technol. 2009, 27, 5639–5647. [Google Scholar] [CrossRef]
- Fields, R.; Lunde, C.; Wong, R.; Wicker, J.; Kozlowski, D.; Jordan, J.; Hansen, B.; Muehlnikel, G.; Scheel, W.; Sterr, U.; et al. NFIRE-to-Terra SAR-X laser communication results: Satellite pointing, disturbances, and other attributes consistent with successful performance. In Proceedings of the SPIE Defense, Security, and Sensing, Orlando, FL, USA, 13–17 April 2009; Volume 7330. [Google Scholar]
- Wu, R.; Zhao, X.; Liu, Y. Initial Pointing Technology of Line of Sight and its Experimental Testing in Dynamic Laser Communication System. IEEE Photonics J. 2019, 11, 7903008. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Wang, J. Verification of dynamic initial pointing algorithm on two-dimensional rotating platform based on GPS/INS. Proc. SPIE 2015, 9671, 967107. [Google Scholar]
- Li, X.; Yu, S.; Ma, J.; Tan, L. Analytical expression and optimization of spatial acquisition for intersatellite optical communications. Opt. Express 2011, 19, 2381–2390. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Parameters | Master Optical Terminal | Slave Optical Terminals |
|---|---|---|
| Beacon light emission band | 730 nm | 785 nm |
| Beacon light receiving band | 785 nm | 730 nm |
| Beacon beam divergence | 2 mrad | 1 mrad |
| Optical aperture | 186 mm | 90 mm |
| Detection field of view | 7 mrad | 7 mrad |
| Position | Longitude (deg) | Latitude (deg) | Altitude (m) |
|---|---|---|---|
| Master optical terminal | 94.73965454 | 29.72693825 | 3412.197998 |
| Slave optical terminals 1 | 94.72811127 | 29.7315197 | 3355.039063 |
| Slave optical terminals 2 | 94.74954426 | 29.71982796 | 3411.265796 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Zhao, X.; Ding, X.; Wu, X.; Liu, D. Line-of-Sight Initial Pointing Model of Space Dynamic Optical Network and Its Verification. Photonics 2024, 11, 401. https://doi.org/10.3390/photonics11050401
Chen S, Zhao X, Ding X, Wu X, Liu D. Line-of-Sight Initial Pointing Model of Space Dynamic Optical Network and Its Verification. Photonics. 2024; 11(5):401. https://doi.org/10.3390/photonics11050401
Chicago/Turabian StyleChen, Shu, Xin Zhao, Xiaoying Ding, Xiaoyun Wu, and Dewang Liu. 2024. "Line-of-Sight Initial Pointing Model of Space Dynamic Optical Network and Its Verification" Photonics 11, no. 5: 401. https://doi.org/10.3390/photonics11050401
APA StyleChen, S., Zhao, X., Ding, X., Wu, X., & Liu, D. (2024). Line-of-Sight Initial Pointing Model of Space Dynamic Optical Network and Its Verification. Photonics, 11(5), 401. https://doi.org/10.3390/photonics11050401