HoloDiffusion: Sparse Digital Holographic Reconstruction via Diffusion Modeling

 , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
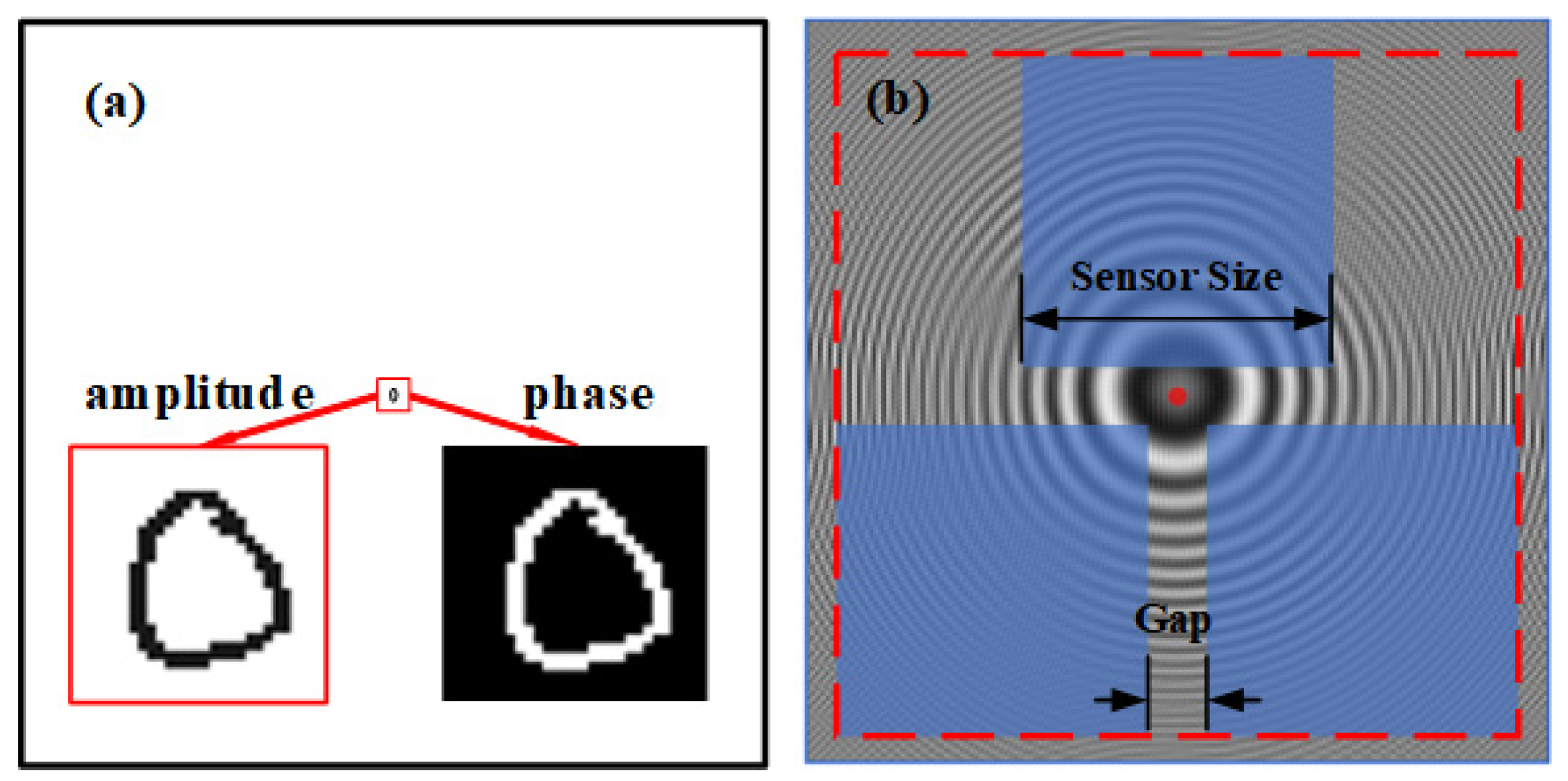
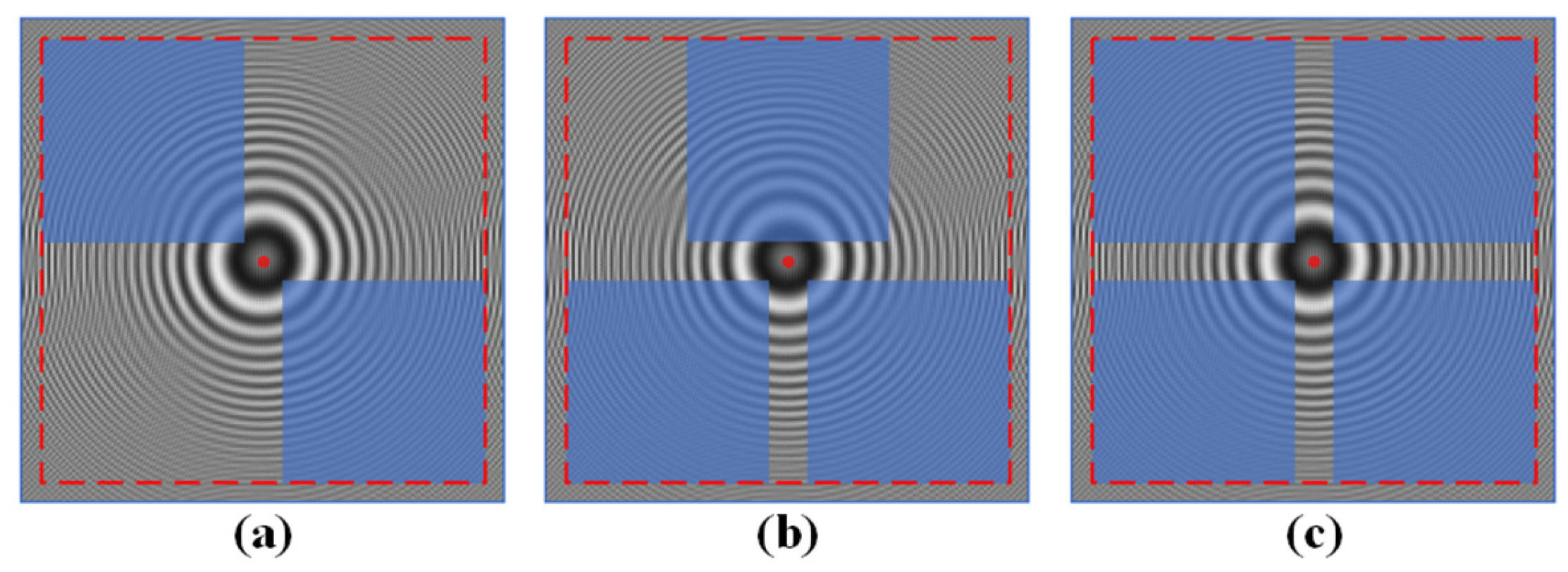
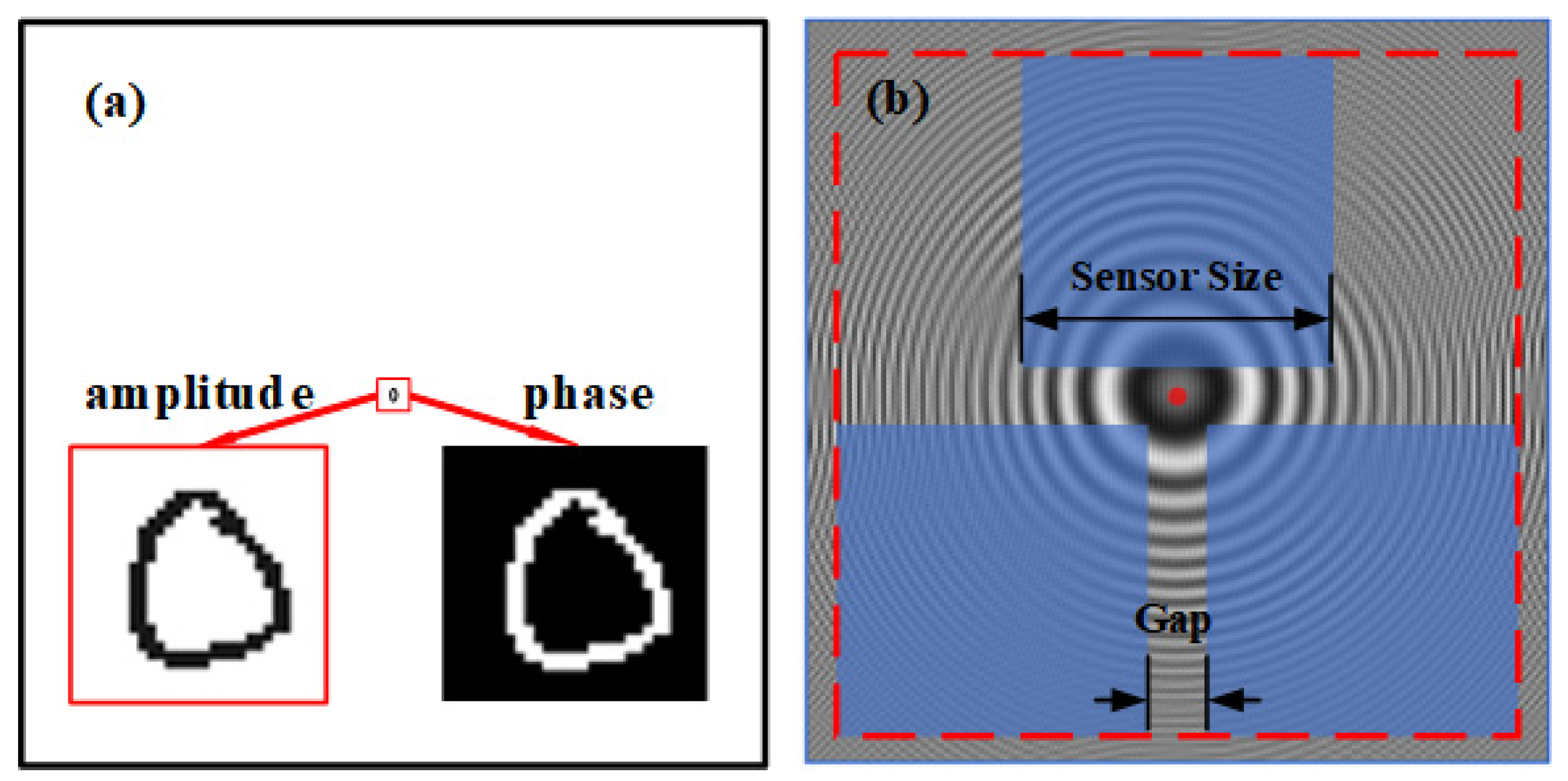
2.1. Digital Holography
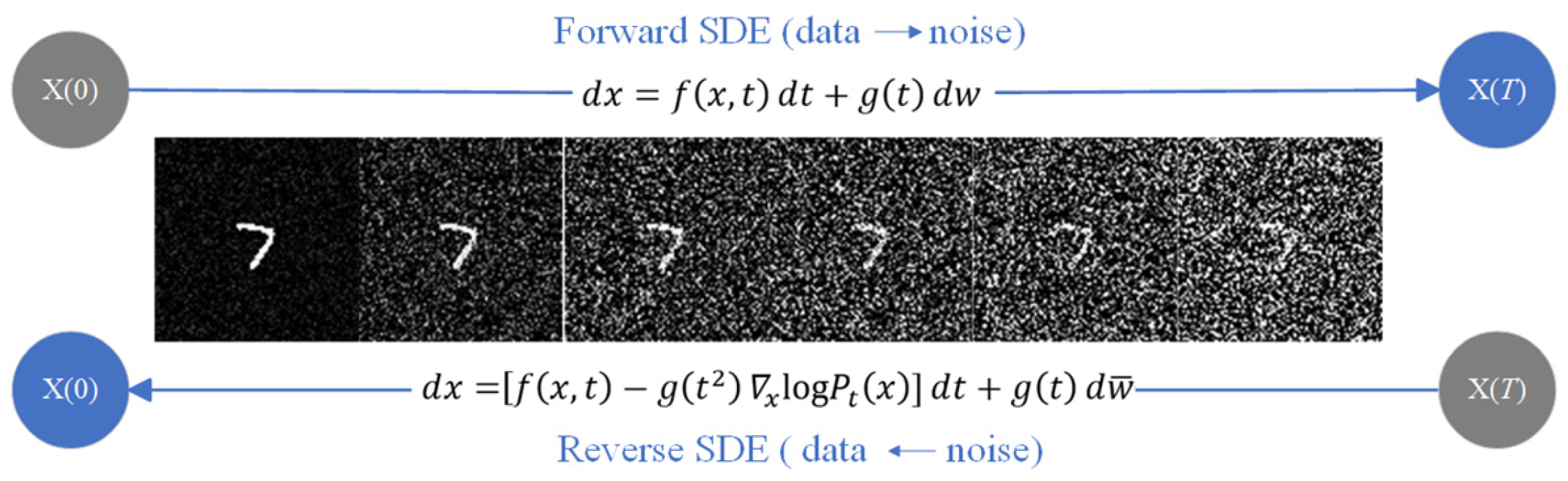
2.2. Score-Based Generative Model
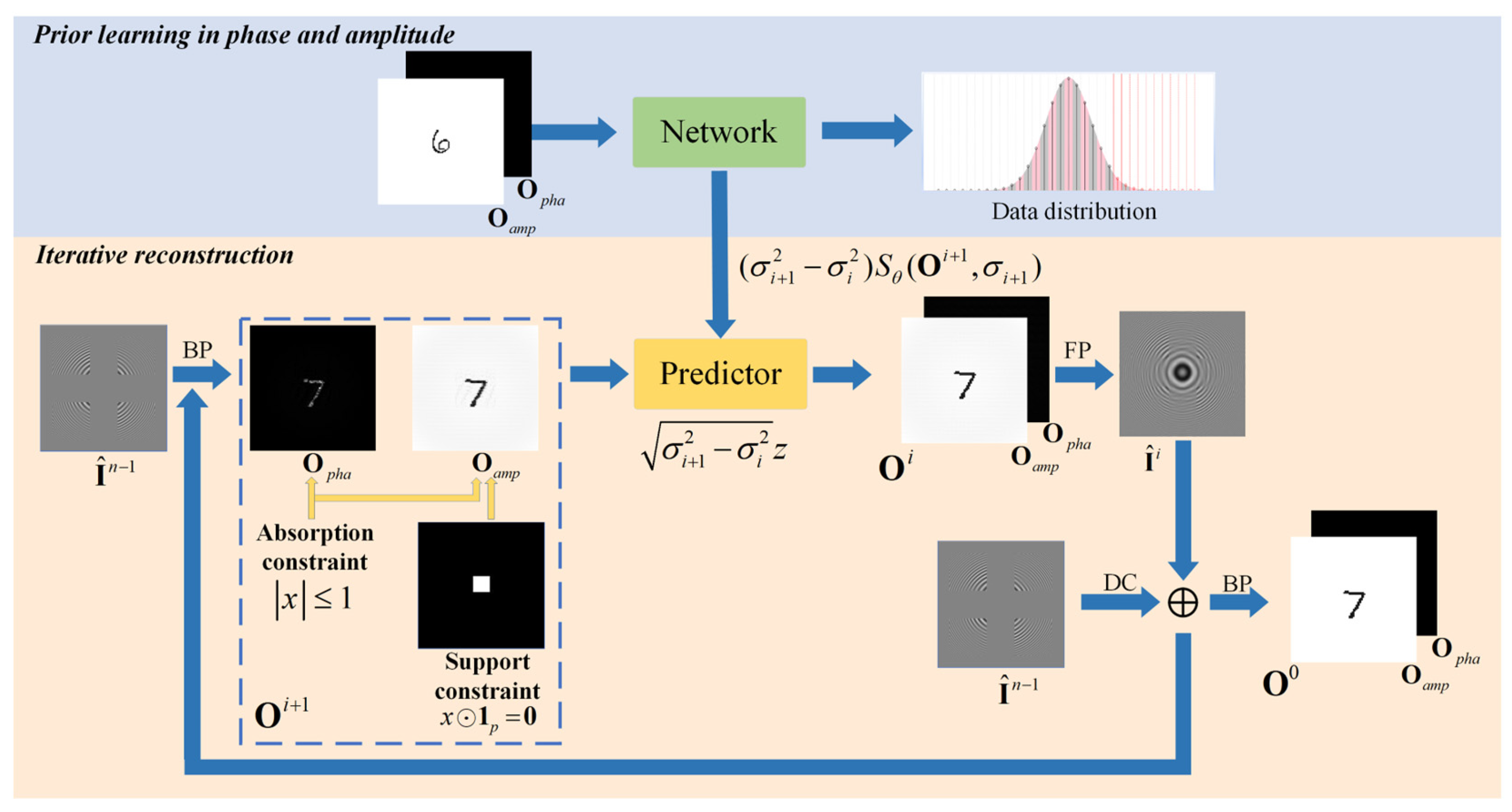
2.3. Image Reconstruction Utilizing HoloDiffusion
| Algorithm 1 HoloDiffusion |
| Training stage 1: Dataset: 2: Training 3: Output: Trained HoloDiffusion |
| Reconstruction stage |
| Setting: |
| 1: |
| 2: For to 0 do |
| 3: Update by Equations (13) and (14) (Constraints) 4: 5: 6: Update by Equation (16) (Data consistency) 7: |
| 8: End for 9: Return |
3. Results
3.1. Data Specification
3.2. Model Training and Parameter Selection
3.3. Quantitative Indices
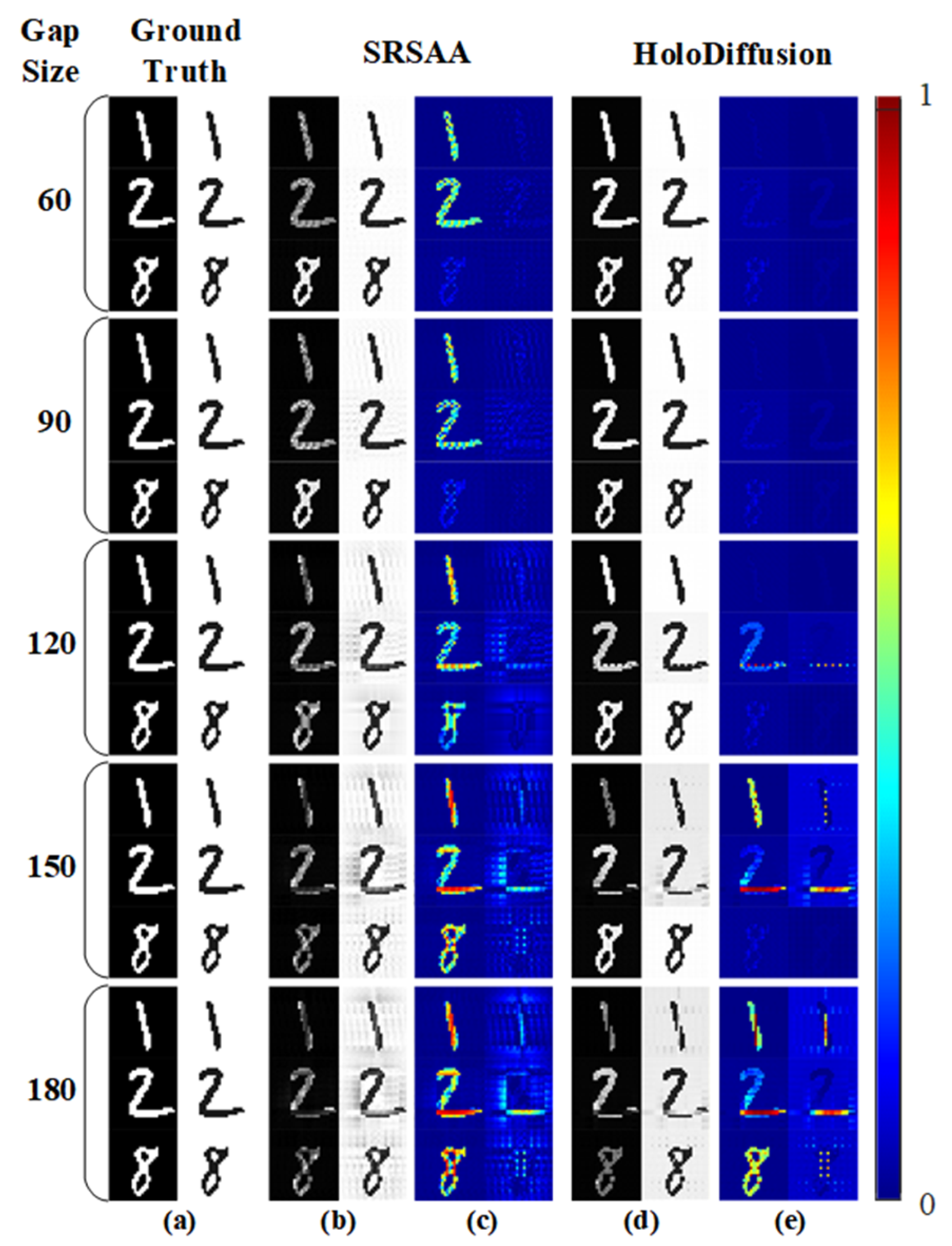
3.4. Reconstruction at Gaps of Different Sizes
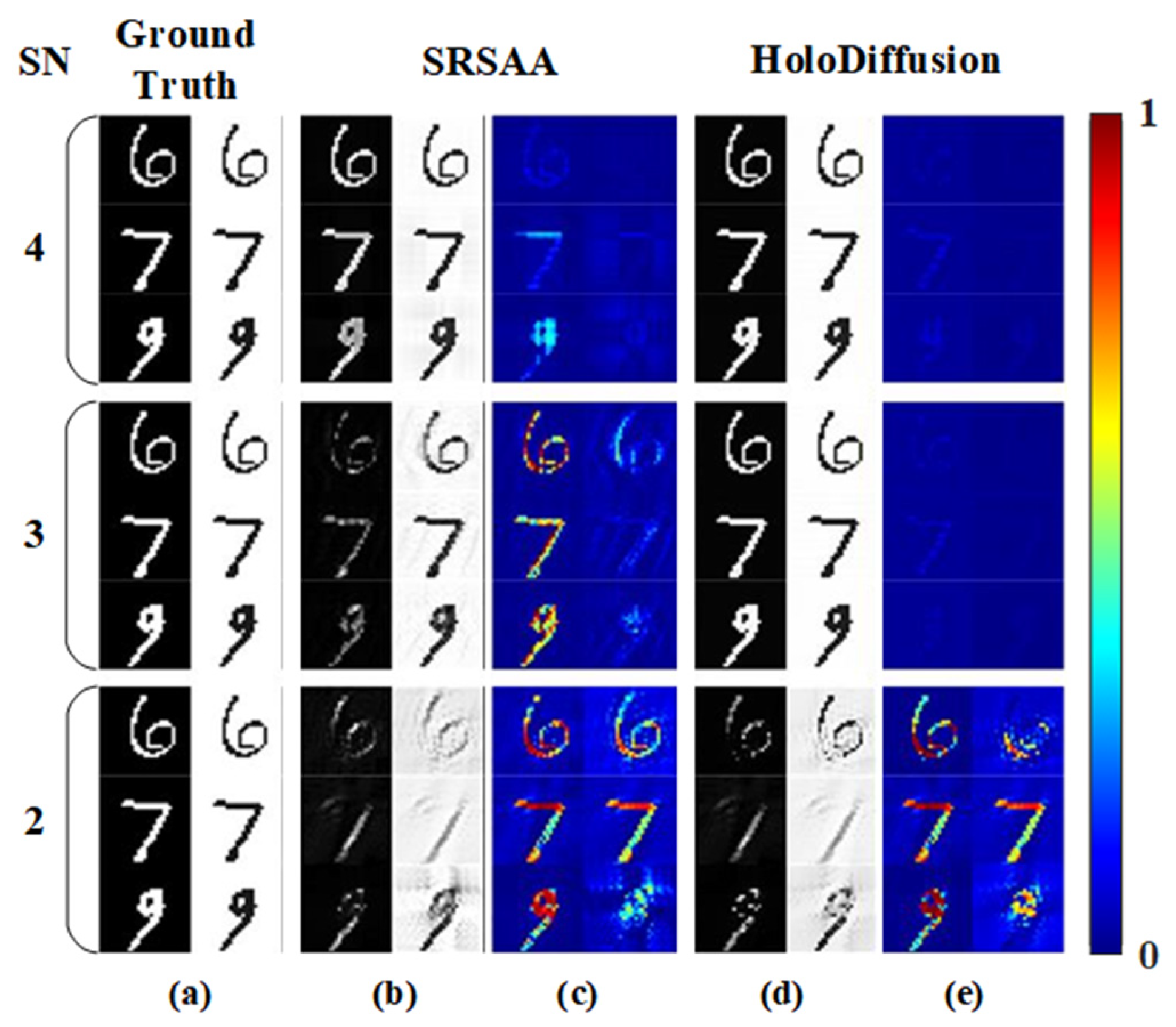
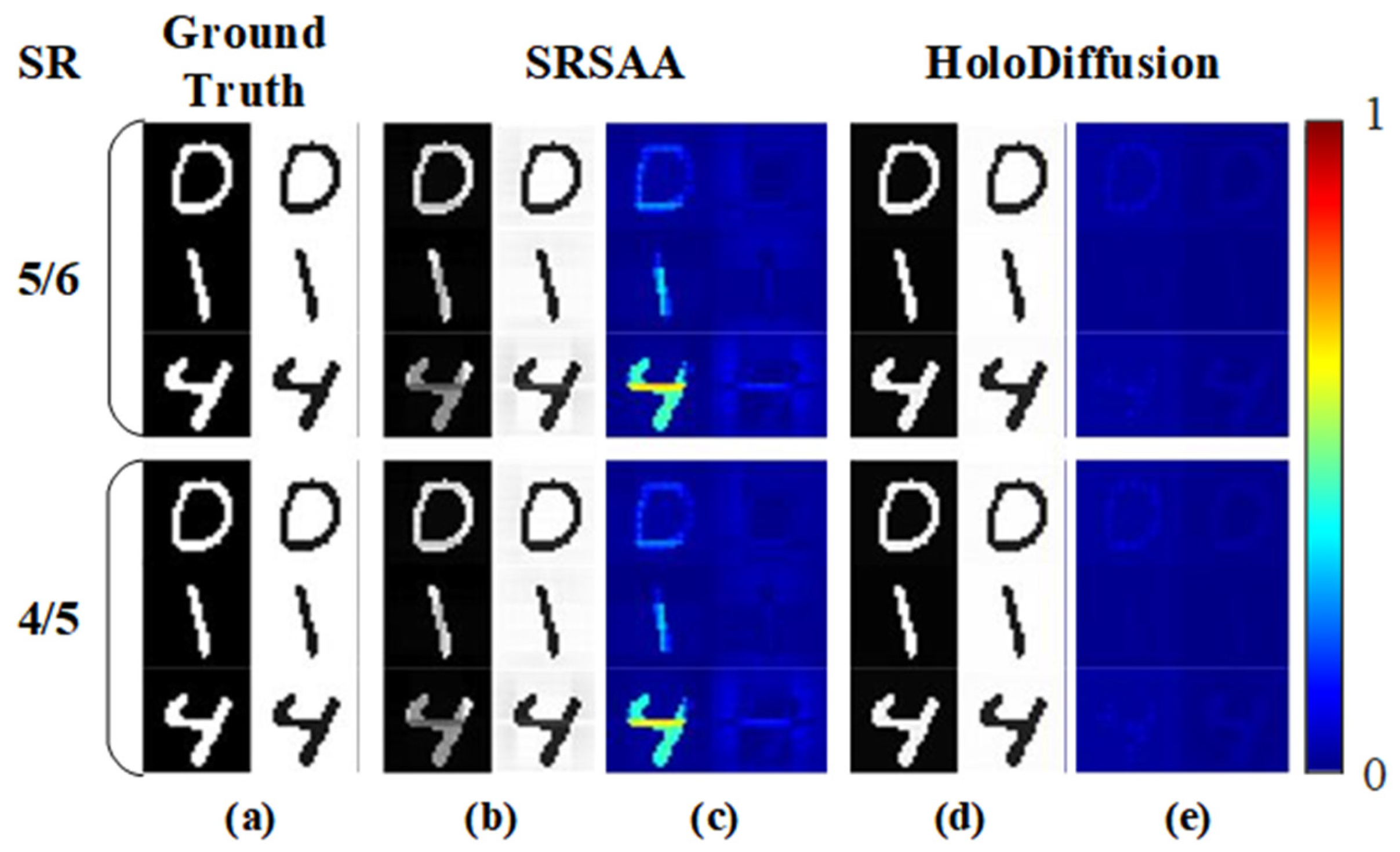
3.5. Reconstruction under Different Numbers of Sensors
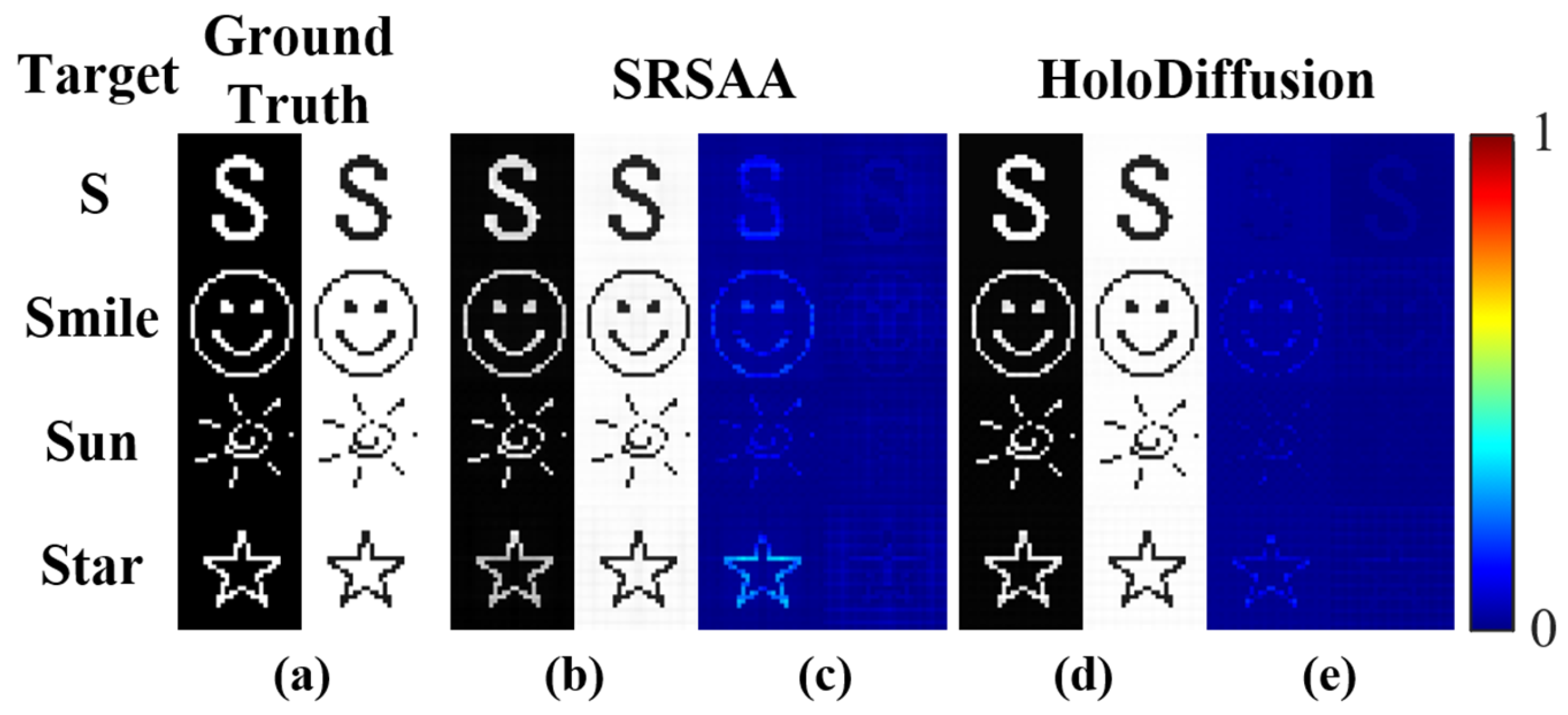
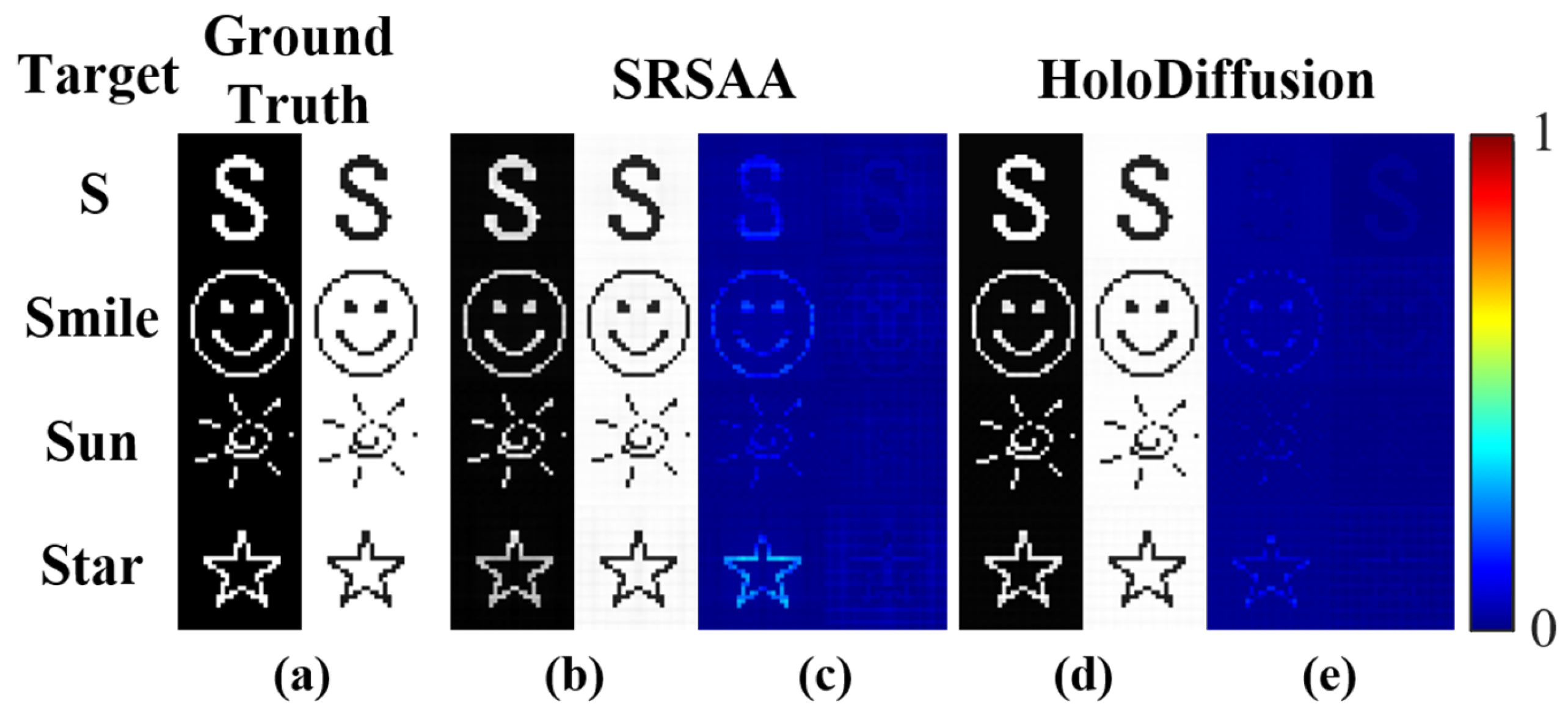
3.6. Generalizability Verification on Cross-Dataset
4. Discussion
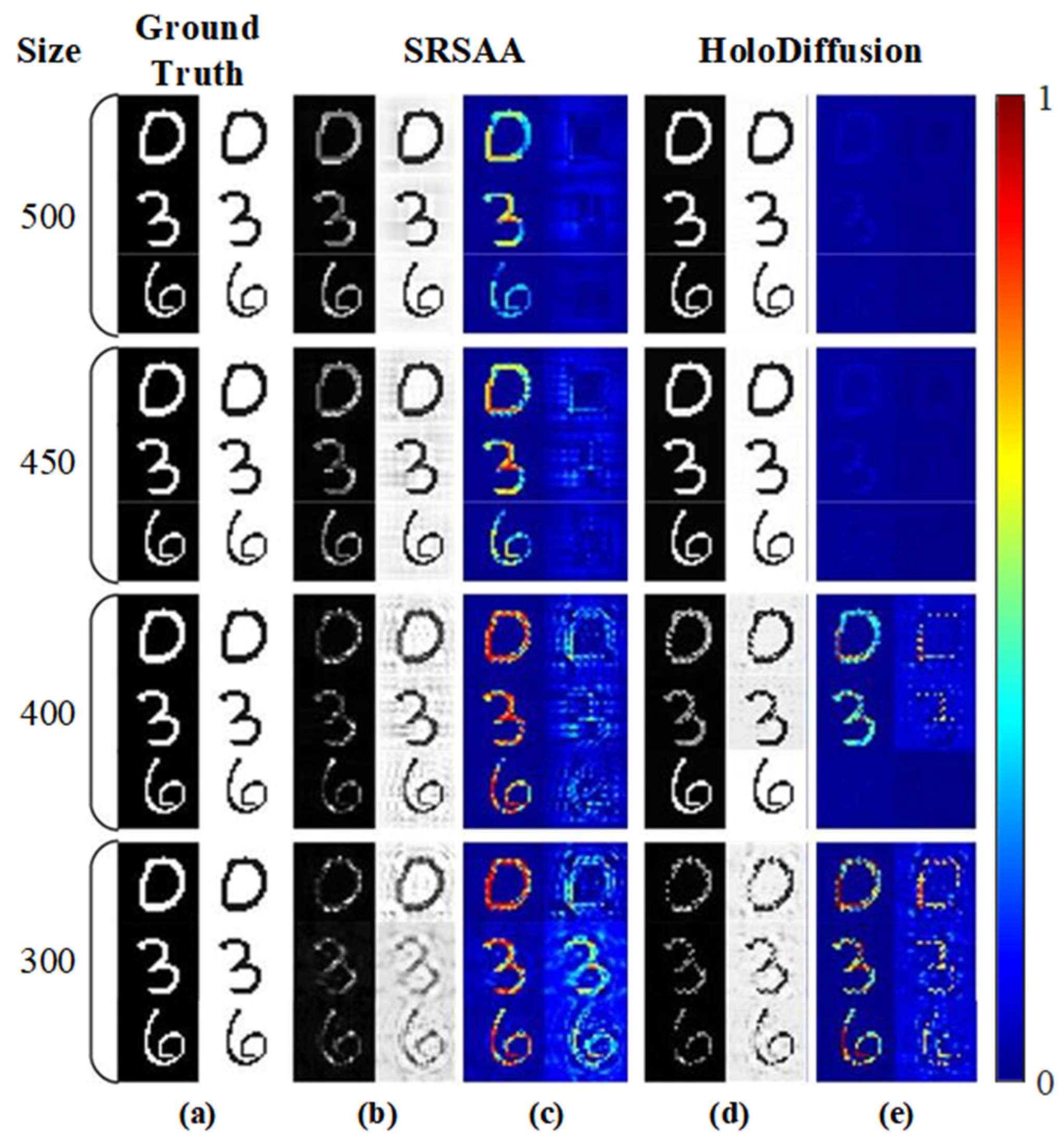
4.1. Reconstruction at Different Sensor Sizes
4.2. Reconstruction under Large Pixel Sizes
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schnars, U.; Jüptner, W. Direct recording of holograms by a CCD target and numerical reconstruction. Appl. Opt. 1994, 33, 179–181. [Google Scholar] [CrossRef] [PubMed]
- Schnars, U.; Jüptner, W. Digital recording and numerical reconstruction of holograms. Meas. Sci. Technol. 2002, 13, R85. [Google Scholar] [CrossRef]
- De Nicola, S.; Finizio, A.; Pierattini, G.; Ferraro, P.; Alfieri, D. Angular spectrum method with correction of anamorphism for numerical reconstruction of digital holograms on tilted planes. Opt. Express 2005, 13, 9935–9940. [Google Scholar] [CrossRef] [PubMed]
- Javidi, B.; Tajahuerce, E. Three-dimensional object recognition by use of digital holography. Opt. Lett. 2000, 25, 610–612. [Google Scholar] [CrossRef] [PubMed]
- Javidi, B.; Tajahuerce, E. Tracking biological microorganisms in sequence of 3D holographic microscopy images. Opt. Express 2007, 15, 10761–10766. [Google Scholar]
- Kemper, B.; Bally, G. Digital holographic microscopy for live cell applications and technical inspection. Appl. Opt. 2008, 47, A52–A61. [Google Scholar] [CrossRef]
- Di, J.; Li, Y.; Xie, M.; Zhang, J.; Ma, C.; Xi, T.; Li, E.; Zhao, J. Dual-wavelength common-path digital holographic microscopy for quantitative phase imaging based on lateral shearing interferometry. Appl. Opt. 2016, 55, 7287–7293. [Google Scholar] [CrossRef] [PubMed]
- Cuche, E.; Marquet, P.; Depeursinge, C. Simultaneous amplitude-contrast and quantitative phase-contrast microscopy by numerical reconstruction of Fresnel off-axis holograms. Appl. Opt. 1999, 38, 6994–7001. [Google Scholar] [CrossRef]
- Pourvais, Y.; Asgari, P.; Abdollahi, P.; Khamedi, R.; Moradi, A. Microstructural surface characterization of stainless and plain carbon steel using digital holographic microscopy. J. Opt. Soc. Am. B 2017, 34, B36–B41. [Google Scholar] [CrossRef]
- Thurman, S.T.; Bratcher, A. Multiplexed synthetic-aperture digital holography. Appl. Opt. 2015, 54, 559–568. [Google Scholar] [CrossRef]
- Luo, W.; Greenbaum, A.; Zhang, Y.B.; Ozcan, A. Synthetic aperture-based on-chip microscopy. Light Sci. Appl. 2015, 4, e261. [Google Scholar] [CrossRef]
- Latychevskaia, T.; Fink, H.W. Resolution enhancement in digital holography by self-extrapolation of holograms. Opt. Express 2013, 21, 7726–7733. [Google Scholar] [CrossRef] [PubMed]
- Latychevskaia, T.; Fink, H.W. Coherent microscopy at resolution beyond diffraction limit using post-experimental data extrapolation. Appl. Phys. Lett. 2013, 103, 204105. [Google Scholar] [CrossRef]
- Huang, Z.; Cao, L. Bicubic interpolation and extrapolation iteration method for high resolution digital holographic reconstruction. Opt. Lasers Eng. 2020, 130, 106090. [Google Scholar] [CrossRef]
- Huang, H.; Rong, L.; Wang, D.; Li, W.; Deng, Q.; Li, B.; Wang, Y.; Zhan, Z.; Wang, X.; Wu, W. Synthetic aperture in terahertz in-line digital holography for resolution enhancement. Appl. Opt. 2016, 55, A43–A48. [Google Scholar] [CrossRef]
- Li, Z.; Zou, R.; Kong, W.; Wang, X.; Deng, Q.; Yan, Q.; Qin, Y.; Wu, W.; Zhou, X. Terahertz synthetic aperture in-line holography with intensity correction and sparsity autofocusing reconstruction. Photonics Res. 2019, 7, 1391–1399. [Google Scholar] [CrossRef]
- Gerchberg, R.W.; Saxton, W.O. A practical algorithm for the determination of phase from image and diffraction plane pictures. Optik 1972, 35, 237–246. [Google Scholar]
- Fienup, J.R. Phase retrieval algorithms: A comparison. Appl. Opt. 1982, 21, 2758–2769. [Google Scholar] [CrossRef]
- Huang, Z.; Cao, L. Faithful digital holographic reconstruction using a sparse sensor array. Appl. Phys. Lett. 2020, 117, 031105. [Google Scholar] [CrossRef]
- Song, Y.; Ermon, S. Generative modeling by estimating gradients of the data distribution. Adv. Neural Inf. Process. Syst. 2019, 32. [Google Scholar] [CrossRef]
- Wang, S.; Lv, J.; He, Z.; Liang, D.; Chen, Y.; Zhang, M.; Liu, Q. Denoising auto-encoding priors in undecimated wavelet domain for MR image reconstruction. Neurocomputing 2021, 37, 325–338. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Liu, Q.; Xiao, T.; Zheng, H.; Ying, L.; Wang, S. Multi-contrast MR reconstruction with enhanced denoising autoencoder prior learning. In Proceedings of the 2020 IEEE 17th International Symposium on Biomedical Imaging (ISBI), Iowa City, IA, USA, 3–7 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Avrahami, O.; Lischinski, D.; Fried, O. Blended diffusion for text-driven editing of natural images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 18208–18218. [Google Scholar]
- Daniels, M.; Maunu, T.; Hand, P. Score-based generative neural networks for large-scale optimal transport. Adv. Neural Inf. Process. Syst. 2021, 34, 12955–12965. [Google Scholar]
- Anderson, B.D.O. Reverse-time diffusion equation models. Stoch. Process. Their Appl. 1982, 12, 313–326. [Google Scholar] [CrossRef]
- Gao, Y.; Cao, L. Iterative projection meets sparsity regularization: Towards practical single-shot quantitative phase imaging with in-line holography. Light Adv. Manuf. 2023, 4, 37–53. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gap | Type | SRSAA [dB/NA/NA] | HoloDiffusion [dB/NA/NA] |
|---|---|---|---|
| 60 | Phase | 28.44/0.7997/0.0022 | 35.90/0.9149/0.0003 |
| Amplitude | 37.03/0.9933/0.0002 | 41.89/0.9968/0.0001 | |
| 90 | Phase | 29.28/0.7893/0.0014 | 35.51/0.9049/0.0009 |
| Amplitude | 35.09/0.9833/0.0004 | 41.62/0.9955/0.0002 | |
| 120 | Phase | 21.95/0.7327/0.0108 | 33.14/0.8462/0.0072 |
| Amplitude | 29.24/0.9519/0.0018 | 38.93/0.9684/0.0035 | |
| 150 | Phase | 16.58/0.6153/0.0315 | 29.53/0.7702/0.0145 |
| Amplitude | 23.03/0.8521/0.0087 | 34.64/0.9299/0.0094 | |
| 180 | Phase | 14.67/0.5204/0.0424 | 26.39/0.7012/0.0236 |
| Amplitude | 20.50/0.7861/0.0157 | 30.97/0.8996/0.0153 |
| SN | Type | SRSAA [dB/NA/NA] | HoloDiffusion [dB/NA/NA] |
|---|---|---|---|
| 2 | Phase | 11.55/0.2305/0.0742 | 11.61/0.2430/0.0735 |
| Amplitude | 12.36/0.4862/0.0643 | 12.99/0.5571/0.0568 | |
| 3 | Phase | 8.61/0.1239/0.1426 | 16.72/0.4327/0.0591 |
| Amplitude | 18.06/0.7777/0.0204 | 24.85/0.9260/0.0085 | |
| 4 | Phase | 15.58/0.5822/0.0300 | 34.16/0.8721/0.0021 |
| Amplitude | 26.89/0.8879/0.0022 | 40.43/0.9934/0.0005 |
| Target | Type | SRSAA [dB/NA/NA] | HoloDiffusion [dB/NA/NA] |
|---|---|---|---|
| S | Phase | 27.92/0.8939/0.0016 | 41.46/0.9611/0.0001 |
| Amplitude | 33.62/0.9885/0.0004 | 45.05/0.9992/0.0000 | |
| Smile | Phase | 25.10/0.9793/0.0031 | 30.68/0.9933/0.0009 |
| Amplitude | 31.96/0.9966/0.0006 | 37.68/0.9996/0.0002 | |
| Sun | Phase | 31.32/0.9467/0.0007 | 36.01/0.9419/0.0003 |
| Amplitude | 36.47/0.9969/0.0002 | 42.11/0.9992/0.0001 | |
| Star | Phase | 22.37/0.8049/0.0058 | 30.87/0.9076/0.0008 |
| Amplitude | 30.95/0.9722/0.0008 | 36.80/0.9868/0.0002 |
| Size | Type | SRSAA [dB/NA/NA] | HoloDiffusion [dB/NA/NA] |
|---|---|---|---|
| 350 | Phase | 11.46/0.2372/0.0752 | 11.83/0.2782/0.0702 |
| Amplitude | 13.36/0.5131/0.0550 | 13.44/0.5833/0.0510 | |
| 400 | Phase | 11.95/0.2917/0.0677 | 13.71/0.4010/0.0559 |
| Amplitude | 15.31/0.5984/0.0382 | 15.97/0.7153/0.0353 | |
| 450 | Phase | 13.38/0.4181/0.0514 | 22.27/0.6083/0.0332 |
| Amplitude | 18.52/0.7179/0.0209 | 26.35/0.8425/0.0212 | |
| 500 | Phase | 14.67/0.5204/0.0424 | 26.39/0.7012/0.0236 |
| Amplitude | 20.50/0.7861/0.0157 | 30.97/0.8996/0.0153 |
| SR | Type | SRSAA [dB/NA/NA] | HoloDiffusion [dB/NA/NA] |
|---|---|---|---|
| 1 | Phase | 21.95/0.7327/0.0108 | 33.14/0.8462/0.0072 |
| Amplitude | 29.24/0.9519/0.0018 | 38.93/0.9684/0.0035 | |
| 5/6 | Phase | 19.85/0.6760/0.0171 | 28.71/0.7581/0.0158 |
| Amplitude | 27.16/0.9294/0.0027 | 33.93/0.9275/0.0089 | |
| 4/5 | Phase | 19.61/0.6687/0.0177 | 28.41/0.7553/0.0166 |
| Amplitude | 26.99/0.9257/0.0029 | 33.64/0.9271/0.0090 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Gao, S.; Tong, M.; Huang, Y.; Zhang, Z.; Wan, W.; Liu, Q. HoloDiffusion: Sparse Digital Holographic Reconstruction via Diffusion Modeling. Photonics 2024, 11, 388. https://doi.org/10.3390/photonics11040388
Zhang L, Gao S, Tong M, Huang Y, Zhang Z, Wan W, Liu Q. HoloDiffusion: Sparse Digital Holographic Reconstruction via Diffusion Modeling. Photonics. 2024; 11(4):388. https://doi.org/10.3390/photonics11040388
Chicago/Turabian StyleZhang, Liu, Songyang Gao, Minghao Tong, Yicheng Huang, Zibang Zhang, Wenbo Wan, and Qiegen Liu. 2024. "HoloDiffusion: Sparse Digital Holographic Reconstruction via Diffusion Modeling" Photonics 11, no. 4: 388. https://doi.org/10.3390/photonics11040388
APA StyleZhang, L., Gao, S., Tong, M., Huang, Y., Zhang, Z., Wan, W., & Liu, Q. (2024). HoloDiffusion: Sparse Digital Holographic Reconstruction via Diffusion Modeling. Photonics, 11(4), 388. https://doi.org/10.3390/photonics11040388