1. Introduction
Underwater optical imaging has broad application prospects in many fields such as underwater rescue, seabed resource exploration, submarine vehicle observation, etc. [
1]. However, absorption and scattering cause serious degradation of imaging quality, which severely limits its usefulness in practical scenarios [
2]. In response to this challenge, various methods have been proposed to improve imaging clarity, leading to a proliferation of techniques such as synchronous scanning imaging [
3], range-gated imaging [
4], indirect time-of-flight imaging [
5], deep learning [
6,
7], etc. Leveraging the partially polarized properties of the backscattered light [
8], polarization imaging has also registered a superior descattering performance. Coupled with its simple operation and low cost, this has elevated it to be a research hotspot [
9,
10,
11,
12,
13].
Among polarization-based imaging techniques, polarization-difference imaging (PDI) is a highly regarded tool. Cameron et al. established a solid theoretical foundation for this technology based on the double cones of many invertebrates and vertebrates [
14]. Thus, it was not long before polarization-difference imaging, inspired by some biological visual systems, was proposed by Rowe et al. [
15]. This research quickly gained widespread attention and has grown significantly as a result. Tyo et al. exploited PDI to enhance the point-spread function [
16]. Walker et al. conducted research on polarization subtraction imaging [
17]. Zhu et al. presented the polarization-based range-gated imaging method, suppressing the backscattered light in dimensions of both time and polarization [
18]. Shi et al. proposed the means of polarization difference ghost imaging, again realizing the strengths of both techniques [
19]. In pursuit of imaging clarity, the researchers did not neglect other meaningful issues. Considering the imaging speed, Guan and Tian utilized the Stokes vector to enhance PDI, facilitating the generation of two novel methods targeting imaging timeliness [
20,
21]. Hu et al. implemented illumination modulation via the Mueller matrix, increasing the effects of incident polarized light on imaging quality [
22]. To overcome the barriers of inconsistent polarization direction, Wang et al. proposed a new method based on periodic integration, obtaining better performance in detail enhancement and noise suppression [
23].
Even though significant progress has been made, two issues warrant further consideration. The imaging speed remains a limitation, as many existing methods, including Guan’s and Tian’s methods, are oriented towards imaging static targets, potentially hindering their applicability in dynamic scenarios. On the other hand, the difference process may inevitably eliminate signals from targets with strong depolarization abilities, resulting in a somewhat homogeneous range of applicable target types. This underscores the urgent need for in-depth research to develop new methods capable of effectively imaging moving targets with various polarization characteristics, thereby driving the continuous advancement of imaging techniques.
In this paper, to enhance the dynamic performance and applicability of underwater polarization-difference imaging, a computational difference method based on the Stokes vector [S0 S1 S2]T is proposed. By exploiting the low-pass filtering in the frequency domain, the possible target signal in S1 is eliminated, ensuring the estimation of the intensity distribution of the backscattered light. Subsequently, the clear imaging result is generated via the differential operation between S0 and the magnified estimation result. Static and dynamic imaging experiments on targets with single or complex polarization characteristics were conducted. The results indicated that even in the presence of interfering factors such as uneven illumination, target jitter, and so on, the backscattered light can always be effectively eliminated. Meanwhile, the processing time meets the requirements of dynamic imaging. All this proves that prominent descattering effects, real-time characteristics, greater applicability, and good stability can be obtained simultaneously, meaning that there is huge potential for practical application.
2. Methodology of Underwater Dynamic Polarization-Difference Imaging
According to [
15], the definition of PDI is as follows:
Here,
Ipd(
x,
y) is the result of polarization-difference imaging, and
and
denote two orthogonal linear polarizations.
Usually, the acquisition of two orthogonally polarized images is accomplished by rotating the polarizer. This avenue not only necessitates determining the orientation of the polarizer, but is also time-consuming. To streamline this process, the Stokes vector is chosen as the input image instead. As the complete description of polarization states, the Stokes vector is defined as follows:
Since the circularly polarized component accounts for a small proportion, only the first three components are given. Taking the incident light as a reference,
I0,
I45,
I90, and
I135 denote the polarized image at the corresponding angles, respectively. These images can be decomposed into two parts, with one created from the target light
T, i.e., the desired clear imaging result. The undesired backscattered light
B forms the other part, which is the object to be eliminated by PDI. Further, according to polarization characteristics, both
T and
B can be subdivided into two parts. Under these circumstances, four polarized sub-images can be represented as follows [
24].
The subscripts
p and
n represent the polarized and unpolarized components separately. The former has non-zero intensity only in the direction of polarization, while the latter exhibits equal intensity in any direction [
8].
θ and
φ indicate the angle of polarization (AOP) of the target and the backscattered light, respectively. By substituting Equation (3) into Equation (2), the Stokes vector [
S0 S1 S2]
T can be calculated with a quaternion system.
Only the intermediate process is presented, to highlight the effect of the addition and subtraction operations therein on the polarized and unpolarized components. As can be seen,
S0 indicates the total light intensity, encompassing all polarized and unpolarized components. Since
S1 and
S2 are the results of image subtraction, the unpolarized components are eliminated, leaving only the polarized components. Consequently, the Stokes vector is as follows:
Fortunately, Tp can also be eliminated depending on the polarization properties of the target. As a result, it is possible to estimate the intensity distribution of the backscattered light via S1 and S2. Then, the differential operation between S0 and the estimation result makes clear imaging available immediately.
Considering the polarization characteristics of
T, one class of targets has strong depolarization abilities, leading to the intensity of
Tp being 0. For this reason, the target light does not contribute to
S1 and
S2. In addition, the absence of polarized components causes the target signal to be eliminated in the differential process, making it impossible for previous PDI methods to handle such targets. For highly polarized targets, the intensity of
Tp is substantial. From the imaging results in [
25], it is easy to infer that
θ is 0°. Hence,
Tp is preserved only in the differential process of
S1, while during the formation of
S2, the target signal is again eliminated in its entirety. It should be noted that the remaining target light in
S1 may create obstacles in intensity estimation. However, it is a prerequisite for existing PDI techniques to work well.
As shown in the above analysis, regardless of the polarization characteristics of the target,
S2 is able to directly serve as the estimation result for the intensity distribution of
Bp, as follows:
where
S2(
B) indicates the intensity distribution of backscattered light. For lowly polarized targets,
S1 is also able to directly serve as the estimation result for the intensity distribution of
Bp, as follows:
As for the possible hindrance from the highly polarized target in
S1, it can be removed by the low-pass filtering method [
26].
Here,
FT and
FT−1 are the Fourier transform and inverse transform, and
H(
u,v) represents the low-pass filter in the frequency domain. According to [
27], the Gaussian low-pass filter is chosen for its smoothing properties.
Hence, for lowly and highly polarized targets, the estimation result of
Bp can be represented as follows:
Hence, it seems that the low-pass filter needs to be employed again for the determination of
Bn. Fortunately, there is a simpler and more direct avenue. As per the definition of the degree of polarization (DOP) [
24], there is a link between
Bp and total intensity, i.e., the following:
where
Pscat denotes the DOP of backscattered light and
Btotal is the total intensity of backscattered light. From Equation (13), without estimating
Bn,
Btotal can be obtained directly by amplifying
Bp as follows:
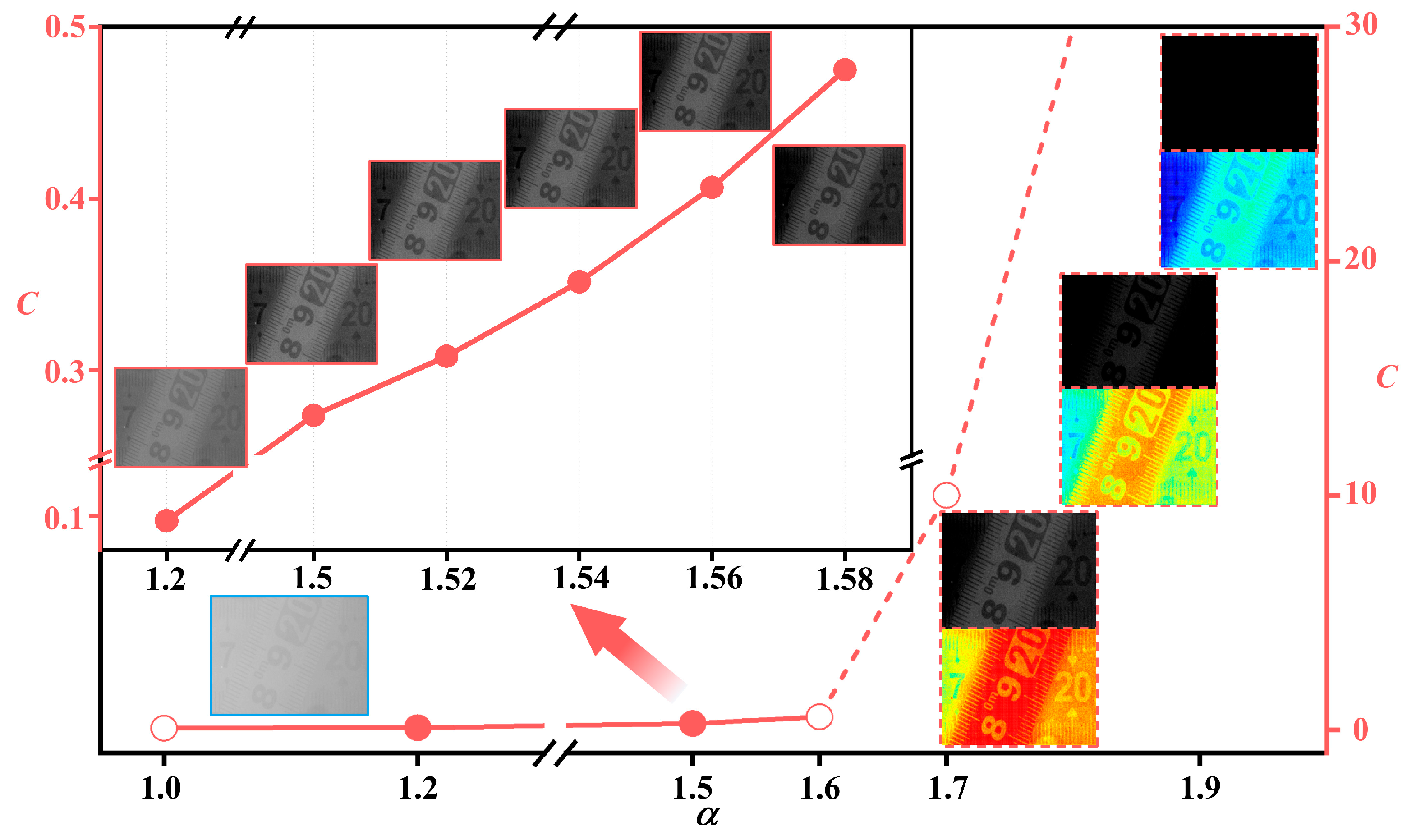
Because
Pscat is an unknown parameter and, for simplicity, the proportional factor (
α) is used to represent amplification,
α has physical significance as the reciprocal of
Pscat. Estimation for this parameter can be found in
Section 4.
Therefore, the differential operation between
S0 and amplified
Bp could be an effective way to eliminate the backscattered light, i.e., the following:
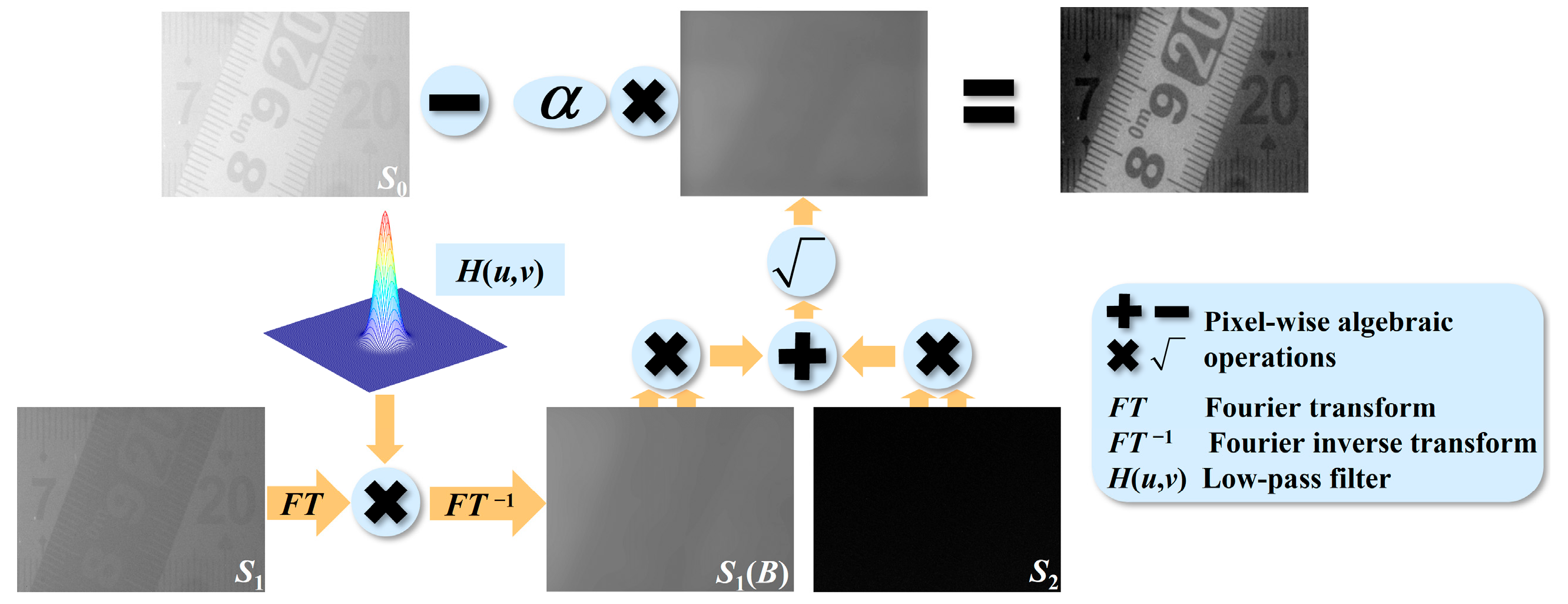
This is our dynamic polarization-difference imaging method based on the Stokes vector, in which
α represents the proportional factor. The processing flow is shown in
Figure 1. Here, a composite target is used as an example. The ruler below is made of steel, and light predominantly reflects specularly off its surface, making it a highly polarized target. The ruler above is made of plastic and the light is diffusely reflected mainly from its surface, making it a lowly polarized target. In this way, this composite target has complex polarization characteristics.
As can be seen, the proposed method accomplishes PDI via the differential computation between the total intensity and the estimation result of the backscattered light. As the spatial variation of the backscattered light is involved, instances of of inhomogeneous intensity distribution can be well countered. Meanwhile, this approach applies to targets with either single or complex polarization characteristics, which allows for greater applicability. In addition, the priors such as the background region can be avoided, making our method capable of dynamic imaging. Based on these facts, it can be anticipated that our method will shine brightly in practical applications.
3. Experiments and Results
3.1. Experimental Setup
To validate the effectiveness of the proposed method, experiments were carried out using targets with different polarization characteristics.
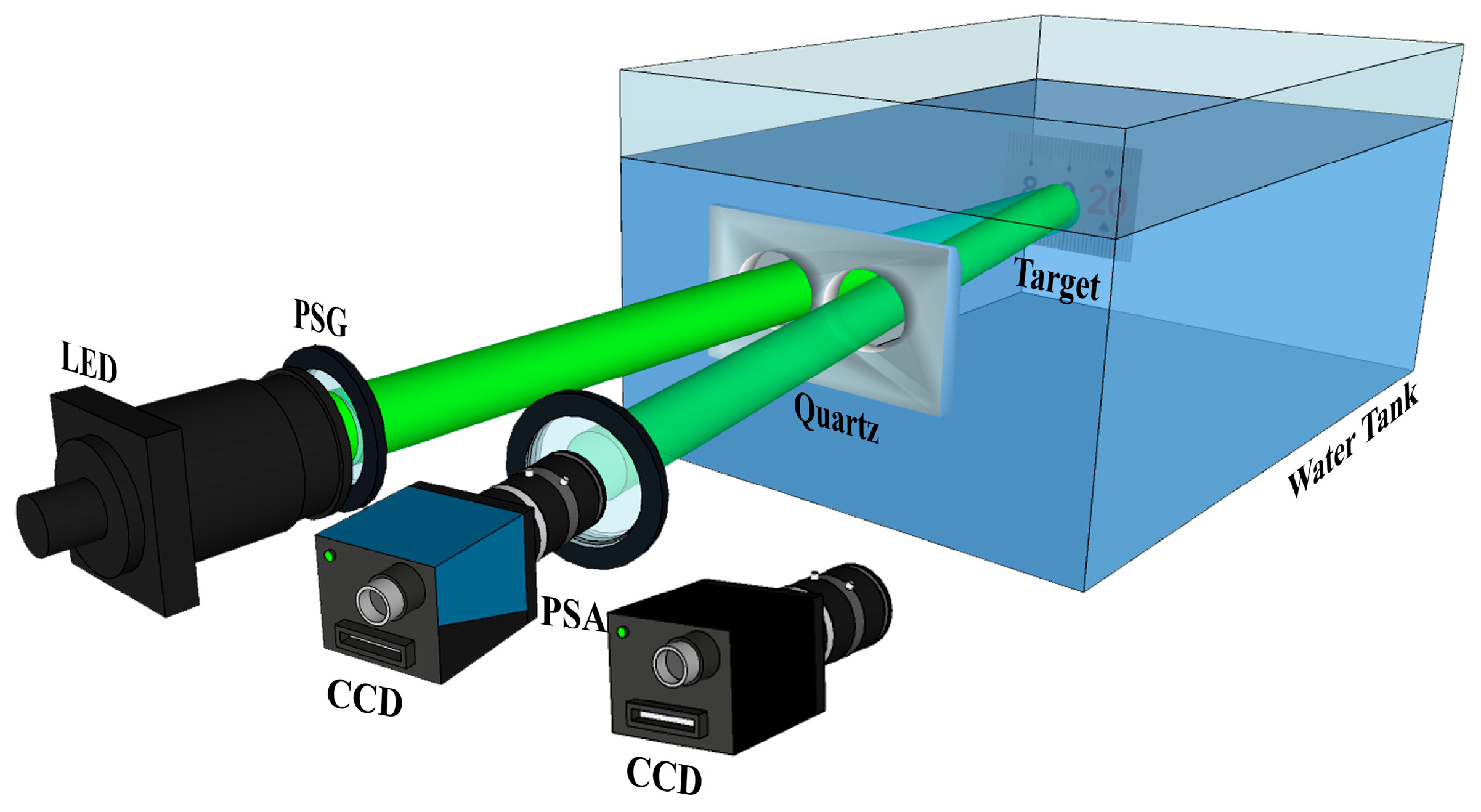
As shown in
Figure 2, water and skimmed milk were added into a tank measuring 180 cm × 60 cm × 60 cm. The water level was allowed to rise to 30 cm, at which point 160 mL and 200 mL of milk were added, which created two scattering media with different turbidities. According to [
28], the mixture of milk and water can be used to simulate an actual seawater environment. The concentrations of milk in the two media were 0.64 g/L and 0.8 g/L, respectively. In this way, the scattering coefficients were 0.059/cm and 0.074/cm, respectively. All the targets were 80 cm from the front wall of the water tank, corresponding to 4.74 and 5.92 scattering mean lengths in the two turbid media, separately.
The imaging devices were placed in front of the water tank. LED and PSG (Polarization State Generator, DAHENG IMAGING, Beijing, China) made up the light source, and a beam of light with a central wavelength of 550 nm was emitted to provide active polarized illumination. The image acquisition unit adapted to the motion state of the target. Specifically, a PSA (Polarization State Analyzer, DAHENG IMAGING, Beijing, China) and an intensity camera (DAHENG IMAGING MER2-502-79U3M, DAHENG IMAGING, Beijing, China) were utilized to obtain images of static targets. During dynamic imaging, the video was recorded by the polarimetric camera (FLIR BFS-U3-51S5P-C, Teledyne FLIR, Shanghai, China) with an exposure time of 0.005 s.
3.2. Imaging Results of Different Methods in Static Imaging
The flowchart in
Figure 1 can serve as simple proof of the effectiveness of the proposed method in coping with targets with complex polarization characteristics. Next, this composite target is taken apart to further validate the applicability of our approach to targets with single polarization characteristics. Imaging results of the steel ruler with weak depolarization abilities are shown in
Figure 3.
As can be seen, the haze formed by the backscattered light dramatically attenuates the clarity of intensity images. To make matters worse, the target is almost invisible in the strong scattering environment, which is the last thing to be expected. CLAHE (Contrast Limited Adaptive Histogram Equalization) stretches the histogram of the image and alleviates the negative consequences of scattering. Though the haze still exists in the image, patterns such as numbers can be vaguely seen. The rapid PDI method created by Tian exploits the differential operation between S1 and S2; however, the spatial variation of backscattered light is not considered. Therefore, it is not surprising that imaging is limited with such a large field of view. Zhao’s method is based on a polarization descattering model, and the optimal values of the polarization parameters are obtained by a genetic algorithm, which provides excellent performance in low-scattering environments. However, as turbidity increases, the descattering performance decreases. In contrast, our method yields the most satisfactory results. Through the differential computation between the total intensity and the global distribution of backscattered light, the haze is effectively eliminated, meaning that tiny details can be easily distinguished. Notably, in the enlarged views, the chosen motifs are displayed with exceptional clarity. Meanwhile, stronger scattering does not prevent our method from achieving excellent descattering performance. The thin scale lines can still be retrieved from the dense haze. All these prove the effectiveness and stability of the proposed method.
Figure 4 shows the imaging results and enlarged views of another ruler that is made of plastic. Light is mainly diffusely reflected on the surface of this sticky ruler, which accounts for the loss of polarization-preserving abilities. No apparent changes can be found in the results of intensity imaging and CLAHE. As before, the latter mitigates the veiling effects present in the former. However, Tian’s method suffers a major setback. According to the aforementioned derivation, the differential operation between the polarized components is not suitable for targets with strong depolarization abilities. Unfortunately, Tian’s method falls into this unfavorable situation and meets its Waterloo. Significant inhomogeneities appear in Zhao’s results due to the fact that the spatial variation of the polarization properties is not taken into account. However, the descattering effect of this method is good and is maintained in high-turbidity environments. Thanks to the differential computation between
S0 and the estimation result of the backscatter, our method performs well despite the failure of previous PDI methods, consistently achieving effective elimination of backscattered light regardless of scattering intensity. The prominent imaging effects and stability of the proposed method are verified again. Meanwhile, it can be argued that the proposed method applies to targets with various polarization characteristics. The scope of its application is not only extended to targets with strong depolarization abilities, but it goes a step further and makes the method applicable to composite targets with complex polarization characteristics. Therefore, all of these facts present powerful proof of our method’s greater applicability.
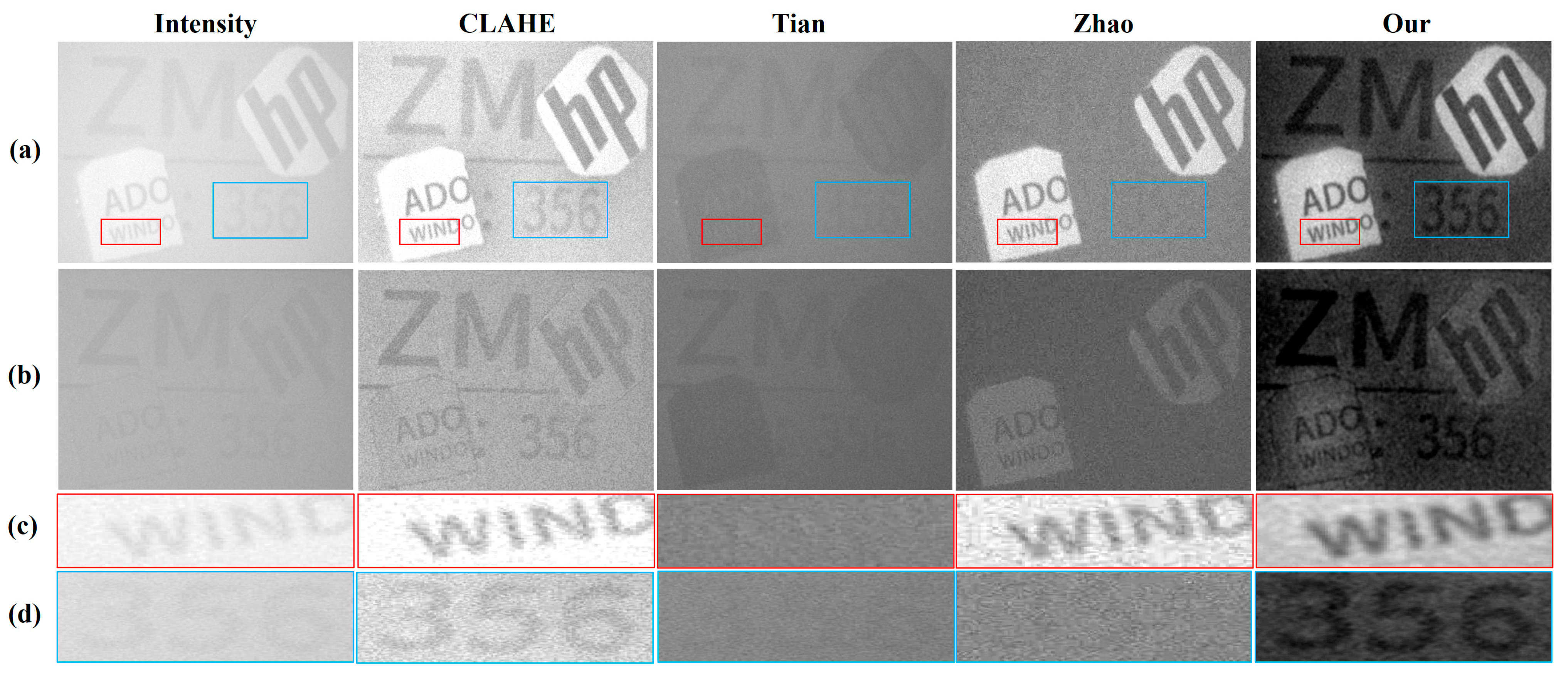
In
Figure 5, an imaging target with complex polarization characteristics further validates the proposed method. This composite target includes three targets with different polarization characteristics and materials. The lowermost target is a piece of iron, and light mainly reflects specularly off the surface, making it a highly polarized target. The two targets above it are disc fragments where light is mainly diffusely reflected on the surface, making them lowly polarized targets.
To reduce the bias of subjective evaluation, two parameters, contrast (
C) and Enhancement Measure Evaluation (EME), were used as the basis for quantitative comparison. According to [
31], the definition of
C is as follows:
where
σ is the standard deviation of the grayscale values of the pixels in the image;
is the average gray value of the image;
M and
N represent the numbers of rows and columns, respectively; and
I(
i,j) denotes the gray value of the pixel located in the
ith row and
jth column. The formula of EME is given in [
32]:
Here,
k1 and
k2 indicate that the image is divided into
k1 ×
k2 blocks;
l1 and
l2 are the serial numbers of the corresponding horizontal and vertical image blocks, respectively; and
and
denote the maximum and minimum gray values of all the pixels in the image block.
q is set to 0.0001 to avoid denominators of 0.
As shown in
Figure 5, the imaging effects of intensity imaging and CLAHE still do not change much. The visual effect of the latter is enhanced, but backscattered light is not eliminated. This is shown in
Table 1 by a slight increase in the parameter values. The imaging results of Tian’s method and Zhao’s method are somewhat complementary. As mentioned earlier, Tian’s method is not suitable for lowly polarized targets, which makes the area where the discs are located black. Zhao’s method does not take into account the distribution of polarization characteristics, so it can only work on targets with the same polarization characteristics. Consequently, the imaging effect of the iron sheet is very poor. In contrast, our method continues to show excellent imaging effects. Regardless of the polarization characteristics of the target, the backscattered light can be eliminated to a great extent. Various patterns have a clear display, both in the imaging results and in the enlarged views. In particular, effective elimination can be maintained in high-turbidity environments. Consistent with these manifestations, the values of
C and EME are significantly improved, providing reliable and objective data for the improvement of imaging quality.
Based on the above, it can be argued that our method can obtain prominent descattering effects, greater applicability, and good stability simultaneously.
3.3. The Dynamic Imaging Results
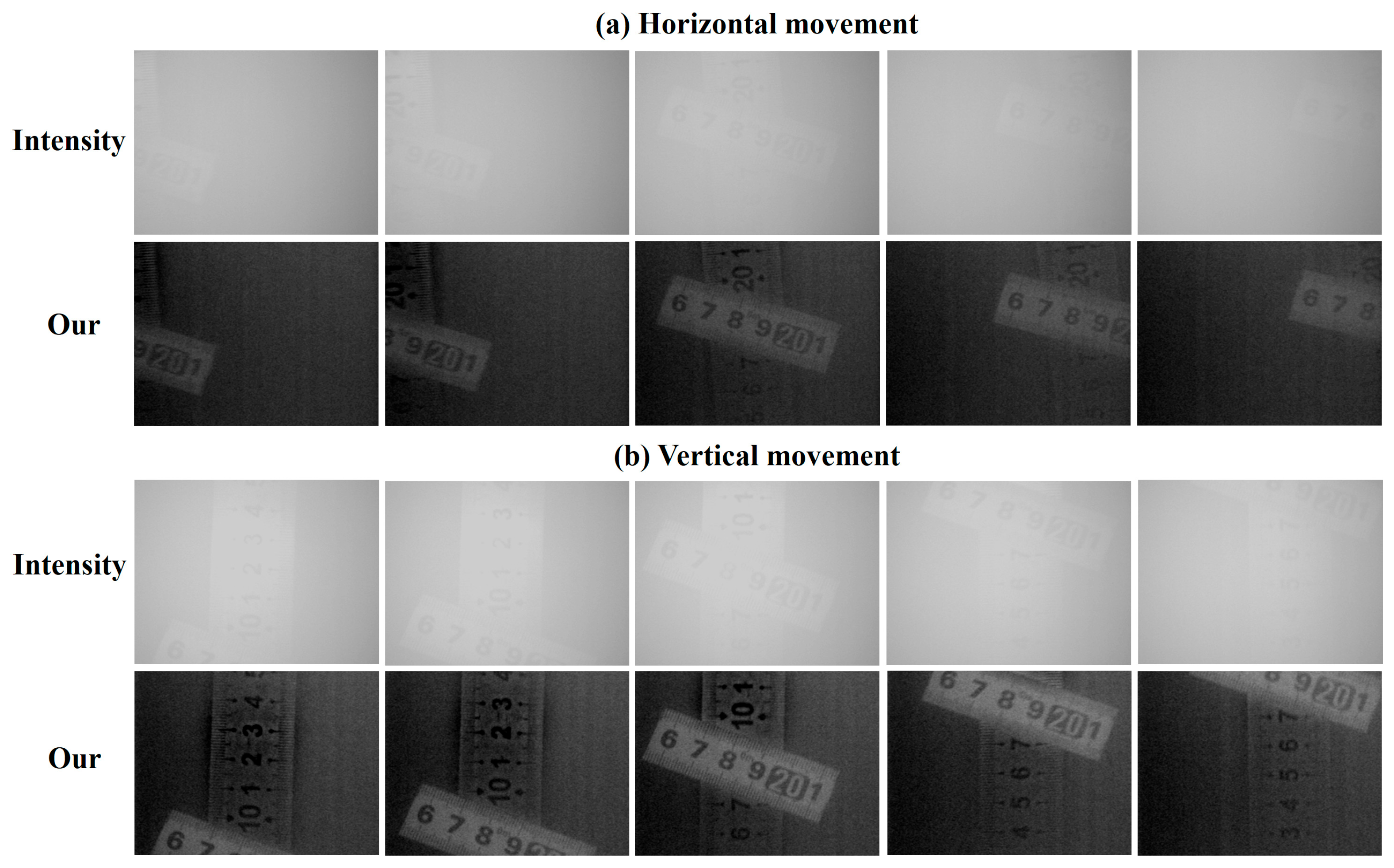
To assess the dynamic imaging effects of the proposed method, the composite target with complex polarization characteristics was selected for video shooting. It should be mentioned that in practice, contingencies happen occasionally. Therefore, some accidental factors including uneven illumination, strong specular reflection, and target jitter were also captured in the videos, which assists in proving the stability of the proposed approach in unexpected situations. The dynamic imaging results are shown in
Figure 6.
The results of the quantitative assessment, presented as curves, are shown in
Figure 7.
As can be seen, in the face of challenges stemming from both the complex polarization characteristics of the target and dynamic imaging, which has been a major issue for previous PDI approaches, the performance of the proposed method is surprising enough. The haze produced by the backscattered light is significantly decreased, making the target that is barely visible in intensity images readily apparent. In particular, tiny details such as the scale lines can be clearly distinguished. Consistent with these manifestations, the values of C and EME have increased considerably. Each curve of our imaging results is at the top, pulling away from the intensity curves below by a large distance. The maximum difference is 0.4203 and 9.2220, which implies that our method improves C and EME by a factor of 7.3 and 12.6, respectively. Even with the worst effect as the metric, the improvement is about 2.4 times, which is also commendable. Given this, the excellent dynamic imaging capabilities of the proposed method are well proven.
Next, a transversal comparison between each frame was performed to analyze the stability of our approach. As mentioned earlier, some intentional contingencies were included in the videos. The target jitter and uneven illumination can be found without trouble. The first factor causes the target to deviate from the regular trajectory motion, which is acceptable given that there will always be targets that do not move along a predictable path. However, this might produce the unfavorable consequence of being out of focus. As can be seen, except for the first frame, the rest of the frames are in a state of no precise focus, which certainly adds to the existing blurriness of the intensity image. The detrimental effects of uneven illumination manifest as discrepancies in brightness. This phenomenon is rather similar to the consequences of strong specular reflection. But there is a difference between the two factors, as the latter only produces strong brightness. By comparison, these three contingencies have minimal impact on the proposed approach. In our results, the targets blurred by backscatter and target jitter regain clarity, and the visual effects of the image are greatly improved. Uneven illumination is no longer apparent because the spatial variation of backscattered light is estimated. It may be noted that there are black numbers with white imprints in the upper middle of the first two images in
Figure 5b, which look out of place with the surrounding distribution. However, this is determined by the properties of the low-pass filtering. Strong specular reflections are set in the area occupied by the numbers ‘3’ and ‘2’, leading to a dramatic increase in brightness. At this point, a sudden change in intensity is produced and transformed into the high-frequency component. Consequently, this region is eliminated along with the backscattered light. Fortunately, the target information is kept intact and even accentuated by the black patterns and white imprints. The reason for this abnormal manifestation is understandable, as the area is brighter and so is the intensity after treatment. As a result, the white imprints are formed. Since this has little effect on the imaging results, it can be left alone. Meanwhile, in the context of the dilemmas faced by the previous methods, the response of our approach to the dual challenge is even more valuable. Therefore, it can be argued that our method could be free from unexpected conditions and has good stability.
Based on the above analysis, the prominent imaging effects, greater applicability, and good stability are well documented, which is a big step toward practical application.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}