All-Fiber Laser Feedback Interferometry for Sequential Sensing of In-Plane and Out-of-Plane Displacements


Abstract
1. Introduction
2. Principle
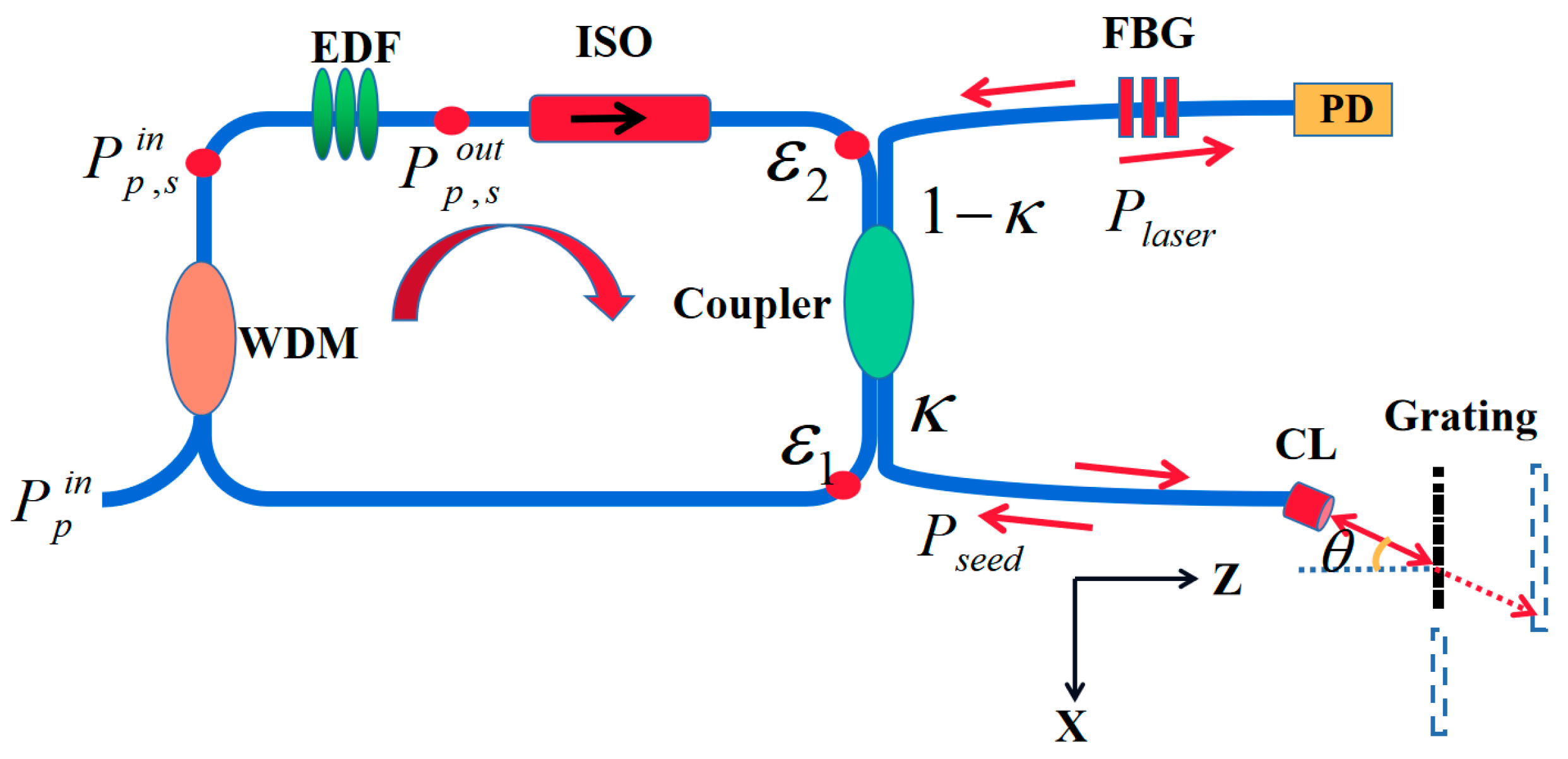
2.1. Theoretical Analysis of an All-Fiber LFI with a Grating
2.2. Numerical Simulation of the LFI Signal Corresponding to Grating Displacement
2.3. Displacement Extraction Method
3. Experimental Results
3.1. Experimental Observations of the LFI Signal Corresponding to In-Plane or Out-of-Plane Displacement
3.2. Sequential Measurement of In-Plane and Out-of-Plane Displacements
4. Discussion
4.1. Measurement Sensitivity
4.2. Measurement Error
4.3. Measurement Speed
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Donati, S. Developing self-mixing interferometry for instrumentation and measurements. Laser Photonics Rev. 2012, 6, 393–417. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, K.; Lu, Y.; Zhang, S.; Tan, Y. Laser Scanning Feedback Imaging System Based on Digital Micromirror Device. IEEE Photonics Lett. 2020, 32, 146–149. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, H.; Xia, W.; Guo, D.; Hao, H.; Wang, M. Self-mixing birefringent dual-frequency laser Doppler velocimeter. Opt. Express 2017, 25, 560–572. [Google Scholar] [CrossRef] [PubMed]
- Lim, Y.L.; Kliese, R.; Bertling, K.; Tanimizu, K.; Jacobs, P.A.; Rakic, A.D. Self-mixing flow sensor using a monolithic VCSEL array with parallel readout. Opt. Express 2010, 18, 11720–11727. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Ruan, Y.; Yu, Y. All-fiber Laser-self-mixing Sensor for Acoustic Emission Measurement. J. Light. Technol. 2021, 39, 4062–4068. [Google Scholar] [CrossRef]
- Liu, B.; Ruan, Y.; Yu, Y.; Xi, J.; Guo, Q.; Tong, J. Laser self-mixing fiber Bragg grating sensor for acoustic emission measurement. Sensors 2018, 18, 1956. [Google Scholar] [CrossRef] [PubMed]
- Zhu, D.; Zhao, Y.; Tu, Y.; Li, H.; Xu, L.; Yu, B.; Lu, L. All-fiber laser feedback interferometer using a DBR fiber laser for effective sub-picometer displacement measurement. Opt. Lett. 2021, 46, 114–117. [Google Scholar] [CrossRef] [PubMed]
- Zhu, K.; Guo, B.; Lu, Y.; Zhang, S.; Tan, Y. Single-spot two-dimensional displacement measurement based on self-mixing interferometry. Optica 2017, 4, 729–735. [Google Scholar] [CrossRef]
- Gu, J.; Cao, X.Y.; Fu, Y.; He, Z.W.; Yin, Z.J.; Yin, H.L.; Chen, Z.B. Experimental measurement-device-independent type quantum key distribution with flawed and correlated sources. Sci. Bull. 2022, 67, 2167–2175. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.M.; Lu, Y.S.; Weng, C.X.; Cao, X.Y.; Jia, Z.J.; Bao, Y.; Wang, Y.; Fu, Y.; Yin, H.L.; Chen, Z.B. Breaking the Rate-Loss Bound of Quantum Key Distribution with Asynchronous Two-Photon Interference. PRX Quantum 2022, 3, 020315. [Google Scholar] [CrossRef]
- Wang, Y.F.; Li, Y.H.; Xu, X.; Tian, M.W.; Zhu, K.Y.; Tan, Y.D. All-fiber laser feedback interferometry with 300 m transmission distance. Opt. Lett. 2021, 46, 821–824. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.K.; Wang, C.C.; Zhao, Y.Y.; Zhu, D.S.; Lu, L. An All-Fiber Self-Mixing Range Finder With Tunable Fiber Ring Cavity Laser Source. J. Light. Technol. 2021, 39, 4217–4224. [Google Scholar] [CrossRef]
- Guardalben, M.J. Littrow angle method to remove alignment errors in grating pulse compressors. Appl. Opt. 2008, 47, 4959–4964. [Google Scholar] [CrossRef] [PubMed]
- Cheng, F.; Fan, K. Linear diffraction grating interferometer with high alignment tolerance and high accuracy. Appl. Opt. 2011, 50, 4550–4556. [Google Scholar] [CrossRef] [PubMed]
- Dragic, P.D. Analytical model for injection-seeded erbium-doped fiber ring lasers. IEEE Photonics Technol. Lett. 2005, 17, 1629–1631. [Google Scholar] [CrossRef]
- Shi, L.; Guo, D.; Cui, Y.; Hao, H.; Xia, W.; Wang, Y.; Ni, X.; Wang, M. Design of a multiple self-mixing interferometer for a fiber ring laser. Opt. Lett. 2018, 43, 4124–4127. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Yang, J.; Zhai, L.; Wang, R.; Cao, Z.; Yu, B. Self-mixing interference measurement system of a fiber ring laser with ul-tra-narrow linewidth. Opt. Express 2012, 20, 8598–8607. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Δxp-p (nm) | 4000 | 5000 | 8000 | 10,000 |
|---|---|---|---|---|
| 1st | 4047 | 4968 | 7994 | 10,031 |
| 2nd | 4051 | 5008 | 7993 | 10,001 |
| 3rd | 4042 | 4964 | 7982 | 9992 |
| 4th | 4031 | 4980 | 7970 | 9981 |
| 5th | 4041 | 4948 | 7916 | 9948 |
| 6th | 4003 | 5032 | 7947 | 9998 |
| 7th | 4019 | 5047 | 7939 | 9995 |
| 8th | 4026 | 4986 | 7949 | 10,029 |
| Mean | 4032.5 | 4994.63 | 7961.25 | 9996.87 |
| SD | 16.09 | 34.55 | 27.98 | 26.41 |
| Δzp-p (nm) | 4000 | 5000 | 8000 | 10,000 |
|---|---|---|---|---|
| 1st | 3949 | 4983 | 7934 | 9973 |
| 2nd | 3956 | 4913 | 7926 | 9918 |
| 3rd | 3939 | 4964 | 7947 | 9949 |
| 4th | 3953 | 4909 | 7981 | 9969 |
| 5th | 3910 | 4978 | 7923 | 9944 |
| 6th | 3960 | 4911 | 8006 | 9850 |
| 7th | 3919 | 4960 | 7922 | 9946 |
| 8th | 3962 | 4910 | 8016 | 9928 |
| Mean | 3943.5 | 4941 | 7956.88 | 9934.97 |
| SD | 19.39 | 33.15 | 38.59 | 38.62 |
| Error of Parameters | |Δx| | |Δz| | |
|---|---|---|---|
| |Δφgx| (or |Δφgz|) | 1° | 4.63 nm | 4.86 nm |
| |Δp| | 1 nm | 0.60 nm | 0.16 nm |
| |Δλ| | 1 nm | --- | 0.82 nm |
| Total error | --- | 5.23 nm | 5.84 nm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Zhang, M.; Li, J.; Xia, W.; Guo, D. All-Fiber Laser Feedback Interferometry for Sequential Sensing of In-Plane and Out-of-Plane Displacements. Photonics 2023, 10, 480. https://doi.org/10.3390/photonics10040480
Xie Z, Zhang M, Li J, Xia W, Guo D. All-Fiber Laser Feedback Interferometry for Sequential Sensing of In-Plane and Out-of-Plane Displacements. Photonics. 2023; 10(4):480. https://doi.org/10.3390/photonics10040480
Chicago/Turabian StyleXie, Zhanwu, Meng Zhang, Jie Li, Wei Xia, and Dongmei Guo. 2023. "All-Fiber Laser Feedback Interferometry for Sequential Sensing of In-Plane and Out-of-Plane Displacements" Photonics 10, no. 4: 480. https://doi.org/10.3390/photonics10040480
APA StyleXie, Z., Zhang, M., Li, J., Xia, W., & Guo, D. (2023). All-Fiber Laser Feedback Interferometry for Sequential Sensing of In-Plane and Out-of-Plane Displacements. Photonics, 10(4), 480. https://doi.org/10.3390/photonics10040480