Abstract
This paper proposes an optimized control filter (OCF) based on the Filtered-x Least Mean Square (FxLMS) algorithm for multi-channel active noise control (ANC) systems. The proposed OCF-McFxLMS algorithm delivers three key contributions. Firstly, even in difficult noise situations such as White Gaussian, Brownian, and pink noise, it greatly reduces error, reaching nearly zero mean squared error (MSE) values across all Microphone (Mic) channels. Secondly, it improves computational efficiency by drastically reducing execution time from 58.17 s in the standard McFxLMS algorithm to just 0.0436 s under White Gaussian noise, enabling real-time noise control without compromising accuracy. Finally, the OCF-McFxLMS demonstrates robust noise attenuation, achieving signal-to-noise ratio (SNR) values of 137.41 dB under White Gaussian noise and over 100 dB for Brownian and pink noise, consistently outperforming traditional approaches. These contributions collectively establish the OCF-McFxLMS algorithm as an efficient and effective solution for real-time ANC systems, delivering superior noise reduction and computational speed performance across diverse noise environments.
1. Introduction
In current signal processing, Active Noise Control (ANC) is an essential approach, especially for settings where noise attenuation in real-time is required. ANC generates an anti-noise with comparable amplitude but opposite phase for canceling harmful noise [1,2,3,4,5,6,7,8]. Due to its small size and high performance, ANC can be found in consumer products, such as loudspeakers, and industrial processes [9,10,11,12,13,14]. Two common classifications for the ANC system are feedforward architecture and feedback architecture. The feed-forward ANC structure uses the reference signal to predict the primary noise and the error microphone to guide filter adaptation. This allows the system to cancel varying, predictable noise types [15]. Furthermore, the terms single-channel and multi-channel ANC can additionally be employed to describe the ANC system, according to the number of secondary sources that are used. In contrast to single-channel ANC, multi-channel ANC employs many secondary sources and error Mics to extend the quiet region. Compared to single-channel ANC, multi-channel ANC (MCANC) offers greater spatial control and is more effective in complex environments due to its ability to extend the quiet region [16,17]. The MCANC system is used in intelligent automation and control, especially in embedded DSP-based noise reduction for industrial and consumer applications [18]. To address varying noise characteristics, adaptive algorithms, such as the multi-channel Filtered-x Least Mean Square (McFxLMSMcFxLMS) algorithm, have been developed. The FxLMS algorithm adapts in real time without requiring prior knowledge of the noise, making it suitable for dynamic environments. Despite its popularity, the standard McFxLMS algorithm is limited by slow convergence and sensitivity to step-size tuning, especially under changing noise conditions and complex secondary route modeling [19,20].
To overcome these limitations, researchers have proposed several enhancements. Variable step-size (VSS) algorithms [21,22], convex combinations of adaptive filters [23], and model order weighting [24] have all shown promise in improving convergence. Hybrid approaches that combine time-domain and frequency-domain methods [25] also improve adaptability. However, these methods often increase computational complexity and rarely exploit physical model variation, such as secondary route diversity, to inform control adaptation. Moreover, multi-channel systems introduce further challenges, such as inter-channel crosstalk and difficulty in accurately modeling secondary routes, which degrade performance in real-world settings [19,20]. Although the McFxLMS algorithm is a foundational method in active noise control, it fails to keep up performance in more demanding requirements, particularly when dealing with non-stationary or broadband noise like White Gaussian noise [26,27]. Recent research trends have explored advanced algorithmic structures, including momentum-based adaptation, output-constrained optimization, and computational efficiency [28,29,30,31,32,33,34,35,36,37,38,39]. Parallel to these developments, emerging directions such as hybrid ANC, deep learning-based control, and meta-learning offer promising future pathways that have also been explored. Our proposed approach, unlike previous efforts, leverages model variation within the physical system to guide adaptive control, resulting in more reliable and effective multi-channel ANC performance. The proposed Optimized Control Filter (OCF-McFxLMS) addresses these challenges, enhancing the algorithm’s robustness and error reduction in diverse noise environments where several noise types, including white Gaussian, Brownian, and pink noise, are present. The optimized control filter for multi-channel FxLMS (OCF-McFxLMS) is a dynamic control filter that enhances the performance of multi-channel active noise control (MCANC) systems by dynamically adapting to changing noise characteristics, ensuring convergence and stability across multiple channels. The contributions of OCF to the McFxLMS algorithm in this study can be summarized as follows:
- Error reduction: The OCF achieves near-zero error values across all Mic channels with reduced crosstalk between Mics, and improved convergence behavior across nonstationary noise environments by inserting an adaptive weighting mechanism across secondary routes, even under challenging different noise types like White Gaussian, Brownian, and pink noise.
- Improved computational efficiency: Integrating the OCF and the algorithm reduces execution time from the standard McFxLMS’s 58.17 s to just 0.0436 s under White Gaussian noise, significantly improving real-time performance while maintaining high accuracy.
- Robust noise control: The OCF-McFxLMS achieves higher signal-to-noise ratio (SNR) values, up to 137.4 dB, and significantly lower MSE values across all Mics, ensuring robust performance across diverse noise types.
2. The Multi-Channel Active Noise Control Technique
The multi-channel active noise control (MCANC) technology is widely used to address the challenge of increasing noise in quiet areas, where it requires greater control independence to effectively manage noise in different regions [40]. The multi-channel Control filter X least means square (McFxLMS) algorithm is one of the more popular MCANC system techniques. By producing a reversing signal, the MCANC technique reduces undesired noise in several channels with an McFxLMS algorithm. The MCANC systems aim to reduce unwanted sound in complex sound environments using multiple reference and error Microphones (Mics) along with multiple secondary routes (four speakers). Unlike single-channel ANC systems, MCANC can handle spatially distributed noise and generate a large quiet area, making it suitable for applications such as aircraft cabins, automotive interiors, and industrial enclosures. However, executing MCANC presents several technical challenges:
- High computational complexity due to multiple adaptive filters running in parallel.
- Crosstalk effects between Mics can reduce the convergence and stability of the adaptive algorithm.
- Dependence between control channels, which limits the system’s ability to independently reduce errors across all Microphones.
- Inaccurate modeling of secondary routes leads to suboptimal adaptation and residual noise.
- Limited adaptability across varying noise types, particularly in nonstationary environments like pink, Brownian, or impulsive noise.
In this study, we used the MCANC system that has four Mics with an error signal because of the White Gaussian noise effect on it, illustrated in Figure 1. This shows the final error signals measured at each Microphone channel. The y-axis shows the error signal amplitude, and the x-axis shows time in seconds.
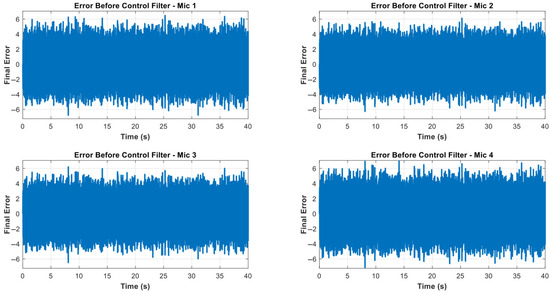
Figure 1.
The final error signals for each Mic channel of the MCANC system with White Gaussian noise.
Table 1 presents the final error value (error amplitude—unitless) for each of the four Mics channel numbers before using any type of control filter. The high error values for every Mic channel observed suggest that the system needs to use more adaptive and robust control filters to minimize the final error value of the MCANC system without affecting the sound speaker. To address these issues, we proposed an Optimized Control Filter with a Multi-channel Filtered Reference Least Mean Square (OCF-McFxLMS) method to enhance the performance of MCANC systems, offering improvements in error reduction, computational efficiency, and adaptability across different noise environments. We tested it under three different noises to guarantee that OCF-McFxLMS works not only under these types of noise but also very well with different noise types.

Table 1.
Final error value for each four Mic before the control filter.
3. Methods
In this article, we produced two methods for controlling noise and enhancing system performance which are the Standard Multi-channel Control Filtered Reference Least Mean Square (McFxLMS) Algorithm that deals with one type of noise White Gaussian noise and the proposed Optimized Control Filter with Multi-channel Filtered Reference Least Mean Square (OCF-McFxLMS) method which is deal with three types of noises white Gaussian, Brownian, and pink noise.
3.1. The Standard Multi-Channel Control Filtered Reference Least Mean Square Algorithm
The traditional Multi-channel Control Filtered Reference Least Mean Square (McFxLMS) algorithm is used in multi-channel active noise control (ANC) systems, and it has been further developed to improve its performance. Multiple reference and error signals correspond to a distinct noise source or noise detection point in a multi-channel system. The purpose of the McFxLMS is to compute control signals for each channel to lower the signal error, which reflects unwanted noise in the surrounding environment. The aim of the McFxLMS is a gradient descent strategy for modifying filter weights to reduce the cost function, which is usually the square of the error signal [41]. The error signal is the difference between the actual residual noise measured at the error microphone and the estimated noise derived from the reference input. The McFxLMS algorithm uses two important routes (pathways):
- Primary Route (Pr): The route the noise signal takes, from the noise source to the error Mics channel [41].
- Secondary Route (Sr): The anti-noise produced by the secondary source travels through this route to reach the error Microphones [41].
The primary and secondary routes were simulated using 256-sample filters, and their impulse responses were saved in .mat and .mat files for consistency and reproducibility in the environment of sound for ANC. The reference signal and a noise signal are created to mimic the ANC system. The reference signal is a wideband noise with a frequency range of (400–800) Hz. White Gaussian noise is filtered using a bandpass filter to achieve this. After passing the reference signal through the filters, the error signal is created, simulating the dispersion of noise in the real world. The sampling frequency used by the system is 16 kHz. The McFxLMS algorithm produces anti-noise signals. As a 4 × 4 × 4 ANC setup is reproduced in this system, there are four error Mics, four secondary sources, and four different noise sources. The algorithm’s step size (learning rate) is set at 0.00001, and the control filters that produce the anti-noise have an average length of 512 samples. The algorithm’s ability to adjust to changes in the environment is determined by this step size. To minimize the error signal at the Mic channels and adjust the control filters, the filtered reference signal is applied. By continuously adjusting the control filters, the McFxLMS algorithm aims to lower the noise levels at each incorrect Microphone (Mic) channel. A block diagram of the McFxLMS algorithm can produce the equation of this algorithm in detail [41]. The reference Mic has the symbol , is the secondary source, and is the error Microphone. The control filter weight () is described in Equation (1):
where . It is the control filter that has a range from the input ( th) to the output ( th), and the control filter length has the symbol (). The reference vector () is described in Equation (2):
where is the reference signal at repetition . , output signal () is generated by the control filter, which is described in Equation (3):
The anti-noise ( for the error Mic through a secondary route in the control filter, as described in Equation (4):
The secondary route ( has a matrix for the impulse result in Equation (5):
The error signal () has the vector been measured through the error Mic () as given in Equation (6):
where is the noise signal at the error Mic channels, and it is a vector: represents the noise vector, and the noise at the th (m = 1, 2, …, ) Error Mics are indicated by . To obtain this, we substitute the estimation () for the impulse, resulting in Equation (7):
To adjust the filter McFxLMS weight (), the generic equation is described in Equation (8):
where is the control filter parameters vector at repetition ; is the step size (constant learning rate), a small constant controlling the convergence speed; () is the filtered reference signal vector at repetition (after passing through the secondary route model); and () is the error signal at the error Mic channels at repetition . As the precise location of the filtered referencing, the vector is described in Equation (9):
The control filter, which treats the reference signal as the control signal, is an essential part of the ANC mechanism. The feedforward multi-channel FxLMS ANC system is simulated by the MATLAB application, with the user able to specify random Mic channels. The primary MATLAB application is used to test the McFxLMS algorithm. The control filter (CF) coefficients of the MCANC system under White Gaussian noise were simulated by the McFxLMS algorithm, as shown in Figure 2.
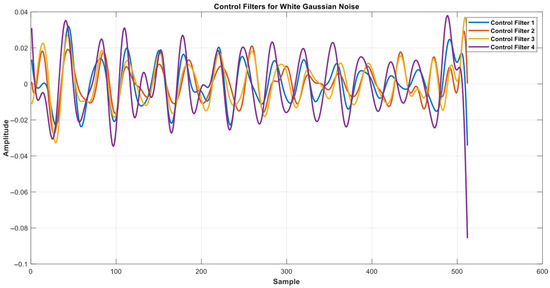
Figure 2.
The behaviors CF parameters of the MCANC system using the McFxLMS algorithm.
3.2. The Proposed Optimized Control Filter with Multi-Channel Filtered Reference Least Mean Square Method
An enhancement to the conventional McFxLMS method, the Optimized Control Filter (OCF) was created to enhance computational effectiveness and performance. By introducing adaptive learning rate strategies, this method leads to faster convergence and more accurate noise cancelation by enabling the system to dynamically modify the filter update rate based on the error signal. The OCF length becomes 500.
This increases the adaptation window and enhances the control algorithm’s convergence rate. The OCF parameters of the secondary route are a collection of parameters obtained from several secondary route models that have already been loaded and are used to illustrate secondary routes. The anti-noise of the OCF propagation from secondary sources to error in the Mic channels is defined by this secondary route. The adaptive adjustment of the OCF parameters is carried out with a step size of 0.0001 (adaptive learning rate ). A small step size is used to ensure stable and precise updates to the control filter, satisfying a balance between convergence speed and system stability. The four error Mics in the MCANC system receive residual signals that are used to adaptively update control filters. The traditional McFxLMS algorithm has been enhanced through the proposed OCF method, which introduces improvements such as adaptive control and modified filter length. With appropriate modifications, the OCF weight update equation is like that of the McFxLMS structure. Therefore, the weights of the OCF are (), which represents the adaptive weight vector of the OCF, is also equal to the matrix that is given in Equation (1). The principal routes associated with delay lines are crossed by the reference signal. By using a delay line, we can make sure that the reference signal and the measured noise at the error Mic channels are accurately synchronized. In the same manner, a matching delay line is crossed by the filtered reference signal, which is the result of the secondary route filtering procedure. The filtered reference signal for the OCF at repetition , which is like () is given in (2), so the output signal () is generated by the OCF can be found in Equation (10):
The anti-noise vector in the OCF ( is generated to successfully overcome the noise through the Microphone (Mic) channels across a secondary route. Before these signals arrive in the surrounding air, they also go across a delay line. The ( is described in Equation (11):
represents the secondary route matrix between the control speakers and the error Mics. The different noise signals applied in the OCF at the error Mic channels are indicated by represents the noise vector, as shown in Equation (12):
where , and the noise at the th (m = 1, 2, …, ) Error Mics are indicated by , and the specific noise contribution used from different noise kinds, such as White Gaussian, Brownian, and pink, was used to test whether the system is represented by . From the subtraction of the vector parameters given in Equation (11) from the vector parameters given in Equation (12), we can obtain the error signal in OCF () for multiple noise types, as shown in Equation (13):
The error signal in OCF () is also updated, as shown in Equation (14):
The total error across noise types (), as shown in Equation (15):
This indicates that the error signal now considers the extra noise . In addition to the difference between the desired noise and the filtered output . The OCF weight update equation will take advantage of this enhanced error signal. In the updated OCF weight vector (). The regularization term (λ) is applied during the weight update step to prevent overfitting and control the growth of the filter weights . It helps keep numerical stability and gives stable performance under various noise conditions. The regularization parameter λ is a fixed scalar, selected empirically based on simulation trials to stabilize the weight update and prevent overfitting or uncontrolled growth of the filter weights. There is no closed-form formula; instead, it is manually set by the user based on convergence behavior. The results are conducted using numerical simulations using MATLAB R2023b. The learning rate () is adaptive. It is dynamically adjusted during each iteration according to the magnitude of the error signal. When the error is high, a larger () is applied to accelerate learning. As the error decreases, () is reduced to avoid overshooting and to ensure smooth convergence. The () at repeated () can be found by using the formula described in Equation (16):
In OCF, the update should be repeated until the error falls below a certain threshold or the system finds a stable result. This adaptive approach allows the algorithm to perform efficiently under varying noise conditions. The architecture of the OCF-McFxLMS algorithm and the McFxLMS algorithm is shown in Figure 3.
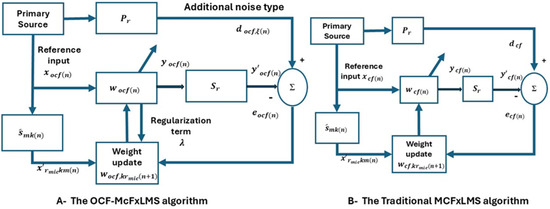
Figure 3.
The architecture of both algorithms: (A)—The OCF-McFxLMS algorithm. (B)—The McFxLMS algorithm.
To simulate real-world situations, OCF parameters of the MCANC system utilizing the OCF-McFxLMS method under the white noise effect are used in the MATLAB program, and the related noises were filtered through the major routes as shown in Figure 4.
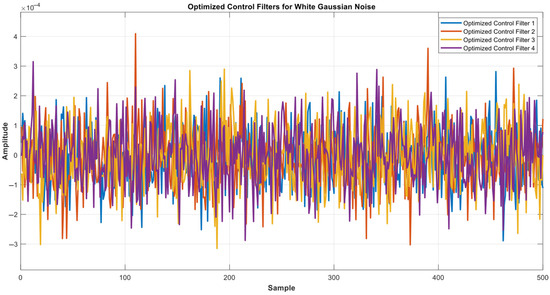
Figure 4.
The simulation of the OCF parameters of the MCANC system using the OCF-McFxLMS method.
4. Simulation Results and Discussion
In this part, the simulation results, under various noise environments, using the Standard Multi-channel Control Filtered Reference Least Mean Square (McFxLMS) algorithm and the proposed solution method Optimized Control Filter for Multi-channel Filtered-x LMS (OCF-McFxLMS), are displayed as simulation figures. This measures the final error levels for each Mic’s channel and the overall execution time to illustrate the performance state of each approach.
4.1. Simulation Results for the Standard Multi-Channel Control Filter Reference Least Mean Square Algorithm
After adding the control filter to the McFxLMS algorithm, the results demonstrated significant improvements. From the simulation in the MATLAB program, it was observed that the McFxLMS algorithm reduced the final error value for each Mic channel in the MCANC system. This reduction led to a notable decrease in the noise levels in the loudspeakers. The execution of the CF resulted in an overall elapsed time of 58.173952 s. The final error signals for each Mic channel are shown in Figure 5. That shows the time-domain false signals from the CFxLMS algorithm of the MCANC system with White Gaussian noise after CF adding at each Microphone channel. The y-axis shows the error amplitude, and the x-axis shows time in seconds. The results are detailed in Table 2, which demonstrates the significant adjustments made by adding the CF into the McFxLMS algorithm by finding the final error signals for each Mic. after McFxLMS, resulting in a notable improvement in noise reduction and system performance.
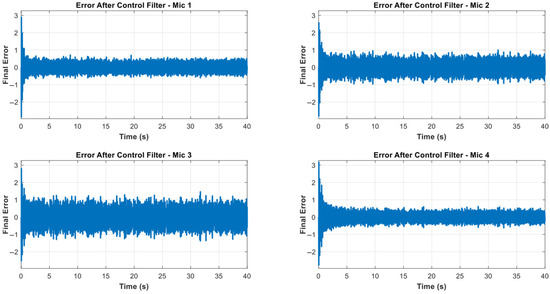
Figure 5.
The final error signals for each Mic channel from the McFxLMS algorithm of the MCANC system with White Gaussian noise.
Table 2.
Final error value after McFxLMS.
4.2. Simulation Results of the Proposed Method with White Gaussian Noise
The proposed solution, the OCF-McFxLMS method, integrates the traditional McFxLMS algorithm with many enhancements to achieve superior noise control performance. The shows for the OCF-McFxLMS algorithm with White Gaussian Noise show a marked improvement in both performance and execution time, as shown in Figure 6. The time domain of the final error signal measured at each Mic channel has decreased significantly, indicating better noise cancelation and system control. More precisely, the error values for all Mic channels are extremely low, demonstrating how well the updated control filter reduces noise.
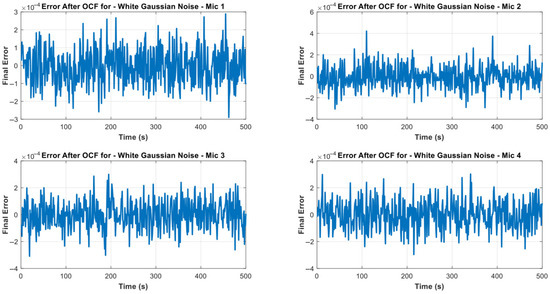
Figure 6.
The final error signals for each Mic channel from the OCF-McFxLMS algorithm of the MCANC system with White Gaussian noise.
Table 3 shows that the final error values for each Mic channel are approximately 10−6 or less, indicating a significant decrease in noise levels when compared to the traditional McFxLMS technique.
Table 3.
Final error value after OCF-McFxLMS.
In addition, the noise kind has a very fast execution time. The White Gaussian Noise was processed by the OCF-McFxLMS method in a mere 0.043646 s, showing the OCF’s effectiveness in lowering computational stress without affecting performance. These findings demonstrate how the OCF may be used to improve error reduction and faster execution of the McFxLMS method, especially in the face of difficult noise conditions like White Gaussian Noise.
Additionally, the frequency-domain error comparison of the MCANC system based on White Gaussian noise, before and after applying McFxLMS and OCF-McFxLMS algorithms, is displayed in Figure 7.
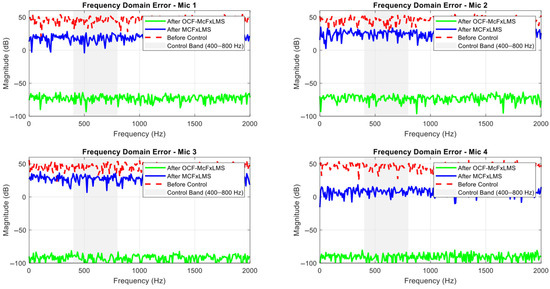
Figure 7.
The frequency-domain error comparison before and after applying both McFxLMS and OCF-McFxLMS algorithms of the MCANC system with White Gaussian noise.
Figure 7 displays the magnitude of spectra for the final error signals with four Mic channels across the frequency range of 0–2000 Hz. The McFxLMS algorithm gives lower error magnitude, particularly in the control band. However, the suggested OCF-McFxLMS approach achieves higher attenuation over the entire spectrum. Within the 400–800 Hz control band, the OCF-based method effectively suppresses the final error down to near the noise floor, improving over 100 dB in some channels. The results showed that the OCF-McFxLMS method outperforms the performance of the McFxLMS method in the frequency domain, demonstrating better error reduction with White Gaussian noise over a wide range of frequencies.
4.3. The Result Checking for the OCF-McFxLMS with Pink and Brownian Noises
The performance of the OCF-McFxLMS algorithm was further tested under more complex noise conditions, including Brownian and pink noises. The results demonstrate the adaptability of the OCF in handling different noise types while maintaining high accuracy and low error values. The OCF-McFxLMS algorithm successfully reduced the Brownian noise across all Mic channels with minimal final error signals for each Mic channel, as shown in Figure 8.
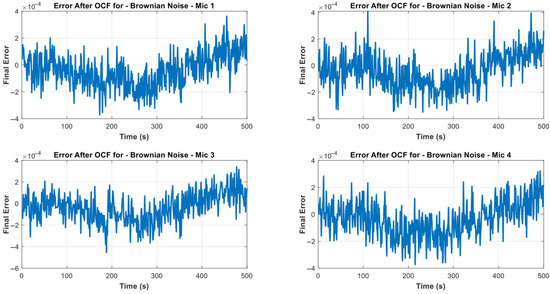
Figure 8.
The final error signals for each Mic channel from the OCF-McFxLMS algorithm of the MCANC system with Brownian noise.
The execution time for Brownian noise was recorded at 0.071637 s, indicating a slightly longer but still more efficient computation time compared to White Gaussian noise. The final error signals values for the four Mic channels are as follows in Table 4.
Table 4.
Final error signals values for four Mic channels.
When subjected to pink noise, the OCF-McFxLMS algorithm showed similarly strong performance. The execution time was faster, at 0.054877 s, reflecting the algorithm’s capacity to handle pink noise efficiently. The final error signals for each Mic channel, although slightly higher than with White Gaussian noise, remain impressively low, ensuring robust noise control as shown in Figure 9. The results in Table 3 demonstrate the OCF-McFxLMS algorithm’s flexibility and efficiency in controlling a wide range of noise types. Both Brownian and pink noises, which typically present greater challenges in the ANC system, were effectively managed by the OCF, maintaining low final error signals and quick execution times. This confirms the robustness of the OCF in delivering consistent performance across various noise conditions.
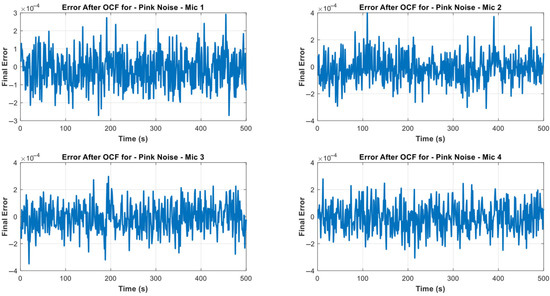
Figure 9.
The final error signals for each Mic channel from the OCF-McFxLMS algorithm of the MCANC system with pink noise.
4.4. Signal Noise Ratio and Mean Square Error
Comparing the results to the standard McFxLMS algorithm, both without a control filter and after the CF and OCF were added to the MCANC system, to investigate the efficiency of the OCF-McFxLMS method. We did this by analyzing the signal-to-noise ratio (SNR) and mean square error (MSE) across various noise types. The SNR is computed for each Mic channel using the formula described in Equation (17):
The clean signal is given in Equation (17) represents the input signal without noise, and if we need to find the SNR for McFxLMS, the is equal to , and if we need to find the SNR for OCF-McFxLMS, the is equal to . The SNR results can be shown in Figure 10, confirming the significant enhancement in noise control performance provided by the OCF-McFxLMS algorithm. The SNR values increased dramatically after applying the OCF, especially when compared to the results before adding any control filter.
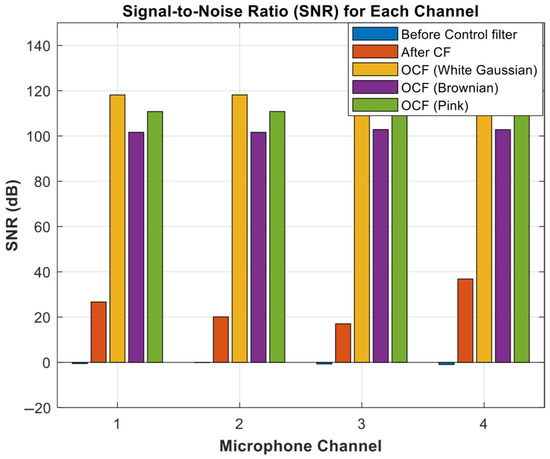
Figure 10.
SNR for each Mic channel before and after adding the OCF-McFxLMS method.
Table 5 displays SNR for OCF-McFxLMS and McFxLMS final data. Before any type of control filter, the system exhibited negative SNR values, indicating poor noise control performance. After applying for the CF with White Gaussian Noise, the SNR values improved substantially, with the highest improvement at Mic 4 (36.8328 dB). OCF with White Gaussian Noise delivered the best results, with SNR values exceeding 118 dB for all Mic channels and reaching over 137 dB for Mic 3. OCF with Brownian noise also provided excellent results, achieving SNR values of over 101 dB across all Mic channels. OCF with pink noise maintained robust performance, with SNR values exceeding 110 dB for all Mic channels. The Mean Squared Error (MSE) is computed for each Mic channel using the formula described in Equation (18):
Table 5.
SNR for OCF-McFxLMS and McFxLMS.
The MSE results provide a quantitative assessment of the error reduction for each Mic in the system before and after the addition of control filters. The MSE results can be shown in Figure 11. Table 6 displays the MSE for OCF-McFxLMS and McFxLMS final data. Before any type of control filter, the MSE values were relatively high for all Mic channels, ranging from 25.5015 to 31.2425. After applying for the CF with White Gaussian Noise, the MSE values improved drastically, showing significant reductions across all four Mic channels, with the lowest error at Mic 4 (0.0052) and the highest at Mic 3 (0.4956).
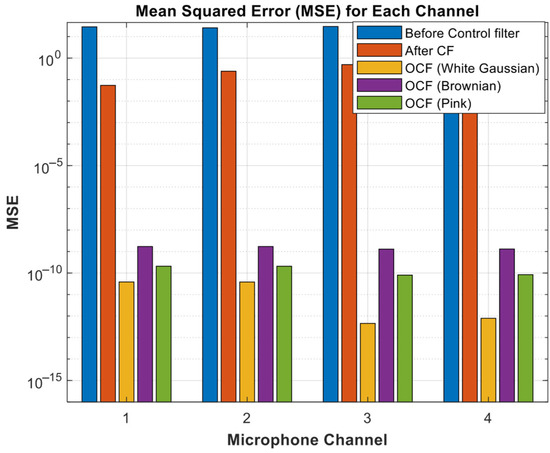
Figure 11.
MSE for each Mic channel before and after adding the OCF-McFxLMS algorithm.
Table 6.
MSE for OCF-McFxLMS and McFxLMS.
The OCF with White Gaussian Noise further reduced the MSE to nearly negligible values, with the MSE approaching zero across all four Mic channels. OCF with Brownian noise showed slightly higher MSE values but still maintained exceptional performance, with final MSE values all below 0.1716 × 10−8. The OCF with pink noise maintained a similarly low MSE performance, demonstrating the filter’s adaptability to different noise types.
5. Conclusions
This research aimed to enhance the performance of the conventional McFxLMS algorithm by introducing an optimized control filter (OCF) for multi-channel active noise control (ANC) systems. Testing the proposed OCF-McFxLMS method under various noise conditions, including White Gaussian, Brownian, and pink noise, demonstrated its ability to adapt to different noise types and effectively reduce errors. The results showed significant improvements, with near-zero mean squared error (MSE) values across all Microphone channels and signal-to-noise ratio (SNR) levels as high as 137.4 dB under White Gaussian noise. Additionally, the optimized algorithm dramatically reduced the execution time from 58.17 s in the standard McFxLMS to 0.0436 s, making it suitable for real-time applications. These findings establish the OCF-McFxLMS algorithm as a powerful and efficient solution for real-time noise suppression in dynamic environments, offering enhanced noise attenuation and computational performance.
In the future, the active noise reduction (ANR) performance of the proposed algorithm can be improved over time. Also, a moving window can be used to compute power over time. However, before power calculation, the DC component should be removed by applying a digital high-pass filter to subtract the instantaneous mean from the time-domain signal. The control of noise rejection can be made by introducing other control techniques in the future. This may include active disturbance rejection control (ADRC), or other recent control schemes that are devoted to this purpose. In addition, embedded system design can be developed to synthesize the proposed filtering algorithm in real-time environments. This study can be extended as future work to include ANN in the process of filtering [42,43,44,45,46,47,48].
Author Contributions
Conceptualization, M.Y.H. and A.S.A.; methodology, A.S.A. and A.J.H.; software, M.Y.H. and A.J.H.; validation, H.A.-K. and A.J.H.; formal analysis, H.A.-K.; investigation, M.Y.H.; writing—original draft preparation, M.Y.H.; writing—review and editing, A.S.A. and H.A.-K.; supervision, A.J.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data is available on request to corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Hansen, C.N. Understanding Active Noise Cancellation; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Kajikawa, Y.; Gan, W.-S.; Kuo, S.M. Recent advances on active noise control: Open issues and innovative applications. APSIPA Trans. Signal Inf. Process. 2012, 1, e3. [Google Scholar] [CrossRef]
- Liebich, S.; Fabry, J.; Jax, P.; Vary, P. Signal processing challenges for active noise cancellation headphones. In Proceedings of the Speech Communication; 13th ITG-Symposium, Oldenburg, Germany, 10–12 October 2018; VDE: Offenbach am Main, Germany, 2018; pp. 1–5. [Google Scholar]
- Qiu, X. An Introduction to Virtual Sound Barriers; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Zhang, J. Active Noise Control over Spatial Regions. Ph.D. Thesis, The Australian National University (Australia), Acton, Australia, 2019. [Google Scholar]
- Ramesh, G.; Logeshwaran, J.; Gowri, J.; Mathew, A. The Management and Reduction of Digital Noise in Video Image Processing by Using Transmission Based Noise Elimination Scheme. ICTACT J. Image Video Process. 2022, 13, 2797. [Google Scholar]
- Chu, Y.; Wu, M.; Sun, H.; Yang, J.; Chen, M. Some practical acoustic design and typical control strategies for multichannel active noise control. Appl. Sci. 2022, 12, 2244. [Google Scholar] [CrossRef]
- Zhuang, Y.; Liu, Y. An adaptive constrained multi-channel active noise control filter design approach using convex cone optimization. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Grand Rapids, MI, USA, 15–18 May 2023; Institute of Noise Control Engineering: Wakefield, MA, USA, 2023; Volume 266, pp. 510–521. [Google Scholar]
- Cai, Y.; Dong, L.; Zhou, Y. A narrowband active noise control algorithm considering the harmonic noise of the loudspeaker. Int. J. Appl. Electromagn. Mech. 2020, 64, 229–235. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, W. A noise control method using adaptive adjustable parametric array loudspeakers to eliminate environmental noise in real time. Int. J. Environ. Res. Public Health 2021, 19, 269. [Google Scholar] [CrossRef]
- Yang, B.; Yin, J.; Ye, Z.; Yang, S.; Wang, L. Development and Testing of an Active Noise Control System for Urban Road Traffic Noise. Appl. Sci. 2024, 14, 175. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, H.; Zhang, Y. Stability guaranteed active noise control: Algorithms and applications. IEEE Trans. Control. Syst. Technol. 2023, 31, 1720–1732. [Google Scholar] [CrossRef]
- Antoñanzas, C.; Ferrer, M.; De Diego, M.; Gonzalez, A. Remote Microphone technique for active noise control over distributed networks. IEEE/ACM Trans. Audio Speech Lang. Process. 2023, 31, 1522–1535. [Google Scholar] [CrossRef]
- Yu, J.; Zheng, Z.; Li, Y.; Wang, H.; Hao, Y.; Liang, X.; Gao, J. An Investigation of Real-Time Active Noise Control for 10 kV Substation Noise Suppression. Sustainability 2023, 15, 13430. [Google Scholar] [CrossRef]
- Shi, D.; Shi, C.; Gan, W.S. A systolic FxLMS structure for implementation of feedforward active noise control on FPGA. In Proceedings of the 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Jeju, Republic of Korea, 13–16 December 2016; pp. 1–6. [Google Scholar]
- Shi, D.; Gan, W.S.; Lam, B.; Shi, C. Two-gradient direction FXLMS: An adaptive active noise control algorithm with output constraint. Mech. Syst. Signal Process. 2019, 116, 651–667. [Google Scholar] [CrossRef]
- Wen, S.; Gan, W.S.; Shi, D. Convergence behavior analysis of FXLMS algorithm with different leaky term. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Seoul, Republic of Korea, 23–26 August 2020; Institute of Noise Control Engineering: Wakefield, MA, USA, 2020; Volume 261, pp. 728–739. [Google Scholar]
- Li, C.; Jin, G.; Liu, H.; Li, J. Active impulsive noise control algorithm based on adjustable hyperbolic tangent function. Circuits Syst. Signal Process. 2023, 42, 5559–5578. [Google Scholar] [CrossRef]
- Zhang, R.; Cheng, Y.; Chen, S. Maximum versoria criterion applied to hybrid active noise control algorithm for the impulsive noise. J. Low Freq. Noise Vib. Act. Control 2023, 42, 1743–1764. [Google Scholar] [CrossRef]
- Wang, J.; Lu, L.; Zheng, Z.; Yin, K.L.; Yu, Y.; Shi, L. Euclidean direction search algorithm with maximum correntropy criterion for active noise control system. Signal Process. 2025, 229, 109759. [Google Scholar] [CrossRef]
- Akhtar, M.T. A time-varying normalized step-size based generalized fractional moment adaptive algorithm and its application to ANC of impulsive sources. Appl. Acoust. 2019, 155, 240–249. [Google Scholar] [CrossRef]
- Long, G.; Lim, T.C. A new robust delayless subband adaptive filtering algorithm with variable step sizes for active control of broadband noise. Appl. Acoust. 2021, 176, 107858. [Google Scholar] [CrossRef]
- Ferrer, M.; Gonzalez, A.; de Diego, M.; Pinero, G. Convex combination filtered-x algorithms for active noise control systems. IEEE Trans. Audio Speech Lang. Process. 2012, 21, 156–167. [Google Scholar] [CrossRef]
- Zhuang, Y.; Mittal, M.; Fernando, R.; Corey, R.M.; Singer, A.C. Active noise control without tap length selection: A model order weighting method. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, New Orleans, LA, USA, 10–12 June 2024; Institute of Noise Control Engineering: Wakefield, MA, USA, 2024; Volume 269, pp. 902–913. [Google Scholar]
- Padhi, T.; Chandra, M.; Kar, A.; Swamy, M.N.S. A new hybrid active noise control system with convex combination of time and frequency domain filtered-x LMS algorithms. Circuits Syst. Signal Process. 2018, 37, 3275–3294. [Google Scholar] [CrossRef]
- Shi, D.; Gan, W.S.; Lam, B.; Shen, X. Comb-partitioned frequency-domain constraint adaptive algorithm for active noise control. Signal Process. 2021, 188, 108222. [Google Scholar] [CrossRef]
- Shi, D.; Gan, W.S.; Lam, B.; Luo, Z.; Shen, X. Transferable latent of cnn-based selective fixed-filter active noise control. IEEE/ACM Trans. Audio Speech Lang. Process. 2023, 31, 2910–2921. [Google Scholar] [CrossRef]
- Shi, D.; He, J.; Shi, C.; Murao, T.; Gan, W.S. Multiple parallel branch with folding architecture for multichannel filtered-x least mean square algorithm. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 1188–1192. [Google Scholar]
- Shi, D.; Lam, B.; Gan, W.S. Analysis of multichannel virtual sensing active noise control to overcome spatial correlation and causality constraints. In Proceedings of the ICASSP 2019-2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 8499–8503. [Google Scholar]
- Shi, D.; Gan, W.S.; Lam, B.; Wen, S.; Shen, X. Active noise control based on the momentum multichannel normalized filtered-x least mean square algorithm. In Proceedings of the INTER-nOISE and NOISE-CON Congrzess and Conference Proceedings, Seoul, Republic of Korea, 23–26 August 2020; Institute of Noise Control Engineering: Wakefield, MA, USA, 2020; Volume 261, pp. 709–719. [Google Scholar]
- Shi, D.; Lam, B.; Wen, S.; Gan, W.S. Multichannel active noise control with spatial derivative constraints to enlarge the quiet zone. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 8419–8423. [Google Scholar]
- Shi, D.; Lam, B.; Gan, W.S.; Wen, S. Block coordinate descent based algorithm for computational complexity reduction in multichannel active noise control system. Mech. Syst. Signal Process. 2021, 151, 107346. [Google Scholar] [CrossRef]
- Luo, Z.; Shi, D.; Ji, J.; Gan, W.S. Implementation of multi-channel active noise control based on back-propagation mechanism. arXiv 2022, arXiv:2208.08086. [Google Scholar]
- Ji, J.; Shi, D.; Gan, W.S.; Shen, X.; Luo, Z. A computation-efficient online secondary path modeling technique for modified fxlms algorithm. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chiba, Japan, 20–23 August 2023; Institute of Noise Control Engineering: Wakefield, MA, USA, 2023; Volume 268, pp. 5216–5226. [Google Scholar]
- Lai, C.K.; Shi, D.; Lam, B.; Gan, W.S. Mov-modified-fxlms algorithm with variable penalty factor in a practical power output constrained active control system. IEEE Signal Process. Lett. 2023, 30, 723–727. [Google Scholar] [CrossRef]
- Lai, C.K.; Lam, B.; Shi, D.; Gan, W.S. Real-time modelling of observation filter in the remote Microphone technique for an active noise control application. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar]
- Shen, X.; Shi, D.; Luo, Z.; Ji, J.; Gan, W.S. A momentum two-gradient direction algorithm with variable step size applied to solve practical output constraint issue for active noise control. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar]
- Shi, D.; Lam, B.; Shen, X.; Gan, W.S. Multichannel two-gradient direction filtered reference least mean square algorithm for output-constrained multichannel active noise control. Signal Process. 2023, 207, 108938. [Google Scholar] [CrossRef]
- Shi, D.; Lam, B.; Ji, J.; Shen, X.; Lai, C.K.; Gan, W.S. Computation-efficient solution for fully-connected active noise control window: Analysis and implementation of multichannel adjoint least mean square algorithm. Mech. Syst. Signal Process. 2023, 199, 110444. [Google Scholar] [CrossRef]
- Wang, B.; Shi, D.; Luo, Z.; Shen, X.; Ji, J.; Gan, W.S. Transferable Selective Virtual Sensing Active Noise Control Technique Based on Metric Learning. arXiv 2024, arXiv:2409.05470. [Google Scholar]
- Elliott, S.J.; Nelson, P.A. Active noise control. IEEE Signal Process. Mag. 1993, 10, 12–35. [Google Scholar] [CrossRef]
- Amjad, H.J.; Talaat, E.N.; Hameed, M.R.; Hameed, A.H. Design of adaptive observer-based backstepping control of cart-pole pendulum system. In Proceedings of the IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT 2019), Coimbatore, India, 20–22 February 2019; pp. 1–5. [Google Scholar]
- Al-Dujaili, A.Q.; Humaidi, A.J.; Allawi, Z.T.; Sadiq, M.E. Earthquake Hazard Mitigation for Uncertain Building Systems Based on Adaptive Synergetic Control. Appl. Syst. Innov. 2023, 6, 34. [Google Scholar] [CrossRef]
- Husain, S.S.; Al-Dujaili, A.Q.; Jaber, A.A.; Humaidi, A.J.; Al-Azzawi, R.S. Design of a Robust Controller Based on Barrier Function for Vehicle Steer-by-Wire Systems. World Electr. Veh. J. 2024, 15, 17. [Google Scholar] [CrossRef]
- Abbas, S.J.; Husain, S.S.; Al-Wais, S.; Humaidi, A.J. Adaptive Integral Sliding Mode Controller (SMC) Design for Vehicle Steer-by-Wire System. SAE Int. J. Veh. Dyn. Stab. NVH 2024, 8, 383–396. [Google Scholar] [CrossRef]
- Al-Dujaili, A.Q.; Hasan, A.F.; Humaidi, A.J.; Al-Jodah, A. Anti-disturbance control design of Exoskeleton Knee robotic system for rehabilitative care. Heliyon 2024, 10, e28911. [Google Scholar] [CrossRef]
- Hasan, M.Y.; Kadhim, D.J.; Humaidi, A.J. Prediction of electricity-consumption and residential bills based on artificial neural network. Int. Rev. Appl. Sci. Eng. 2025, 16, 142–152. [Google Scholar] [CrossRef]
- Ajel, A.R.; Humaidi, A.J.; Ibraheem, I.K.; Azar, A.T. Robust Model Reference Adaptive Control for Tail-Sitter VTOL Aircraft. Actuators 2021, 10, 162. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).