
Comparative Analysis of ALE Method Implementation in Time Integration Schemes for Pile Penetration Modeling



Abstract
1. Introduction
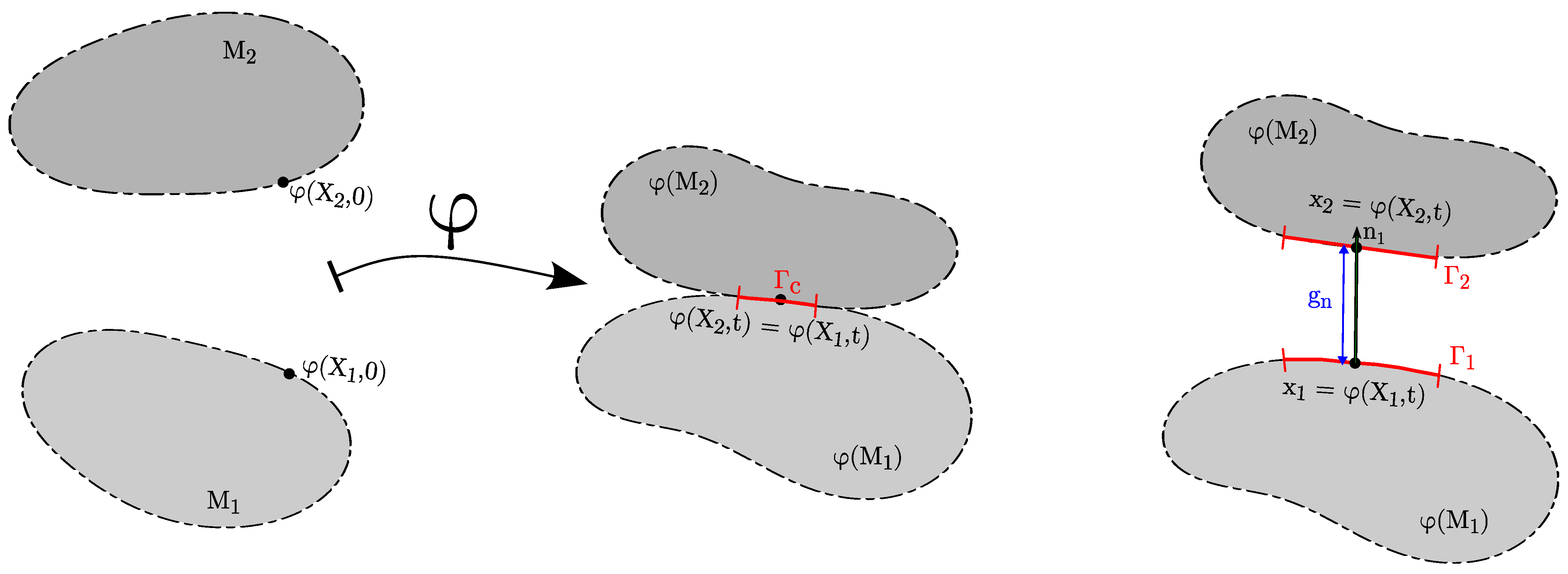
2. Contact Kinematics
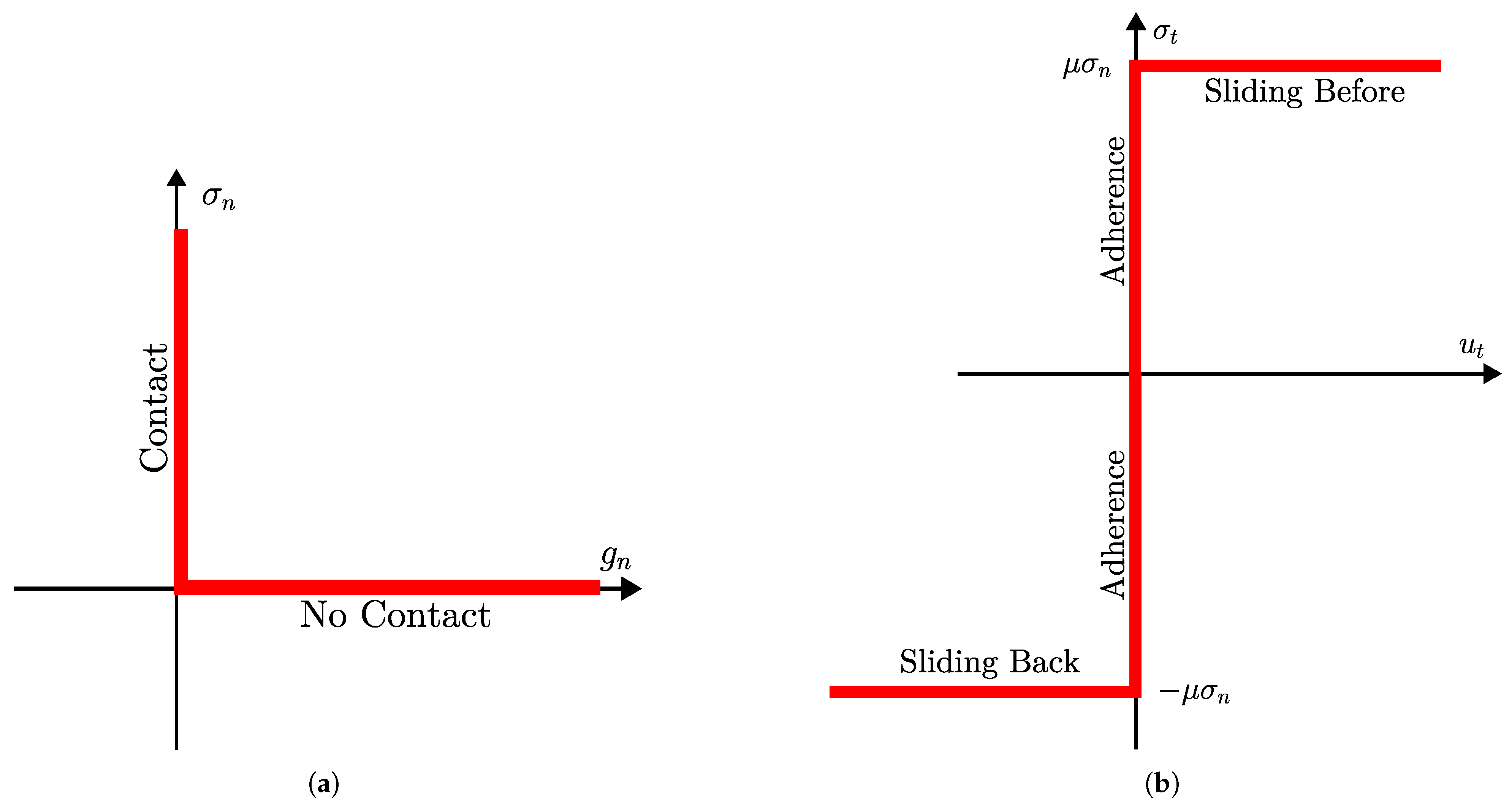
2.1. Normal Conditions
- No penetration occurs
- Compressive contact stress
- The normal contact stress exists only when the surfaces are in contact () and when the surfaces are separated (). These complementary conditions are formulated as .
2.2. Contact with Friction
- Contact with adherence
- Contact with slipwhere is the coefficient of friction, and , respectively, are the tangential contact stress and the tangential displacement.
3. Numerical Methods
3.1. Numerical Time Integration Schemes
3.1.1. Explicit Time Integration
3.1.2. Implicit Time Integration
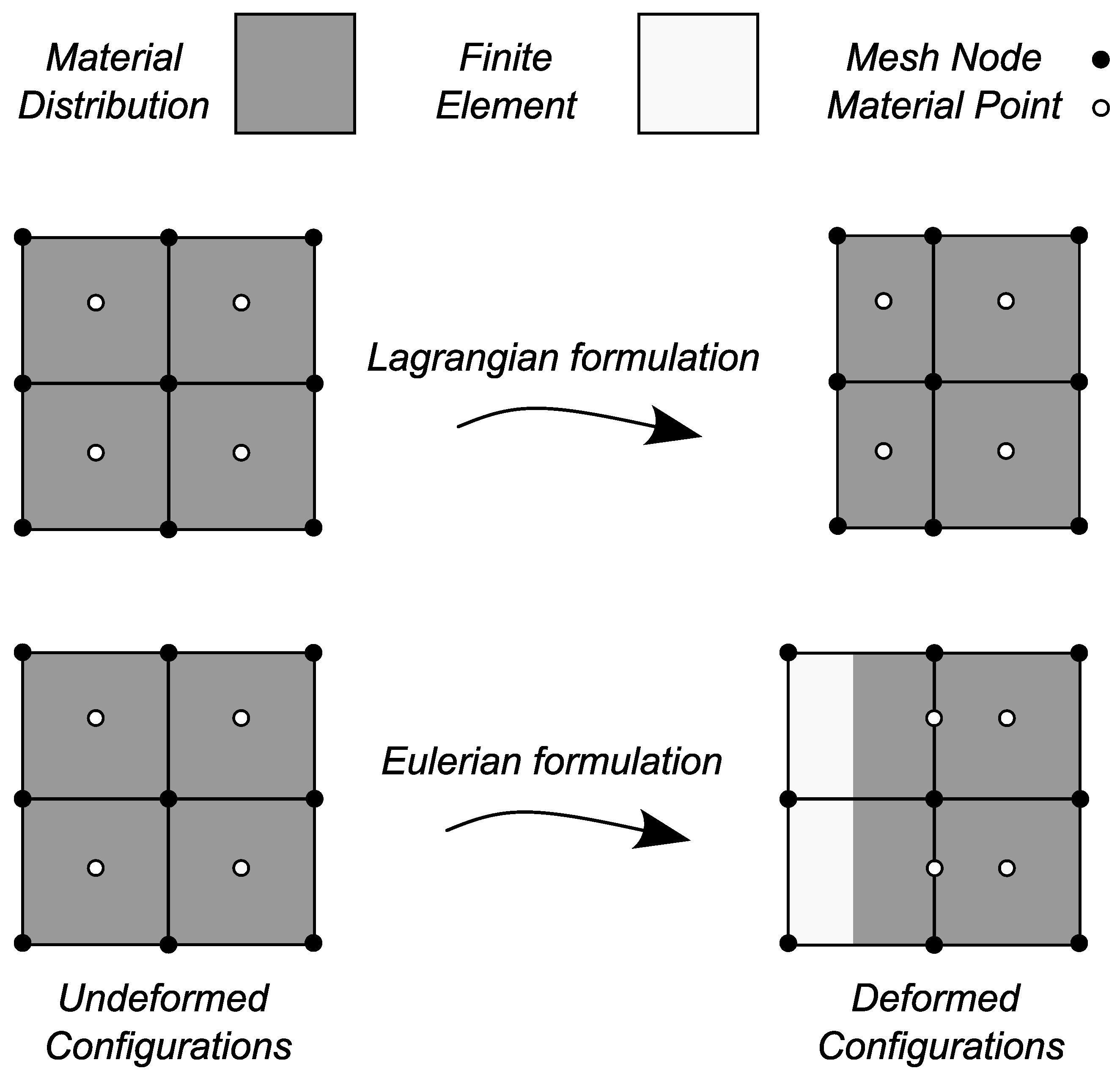
3.2. Arbitrary Lagrangian–Eulerian Method
4. Validation of the Numerical Model
4.1. Field Experiments
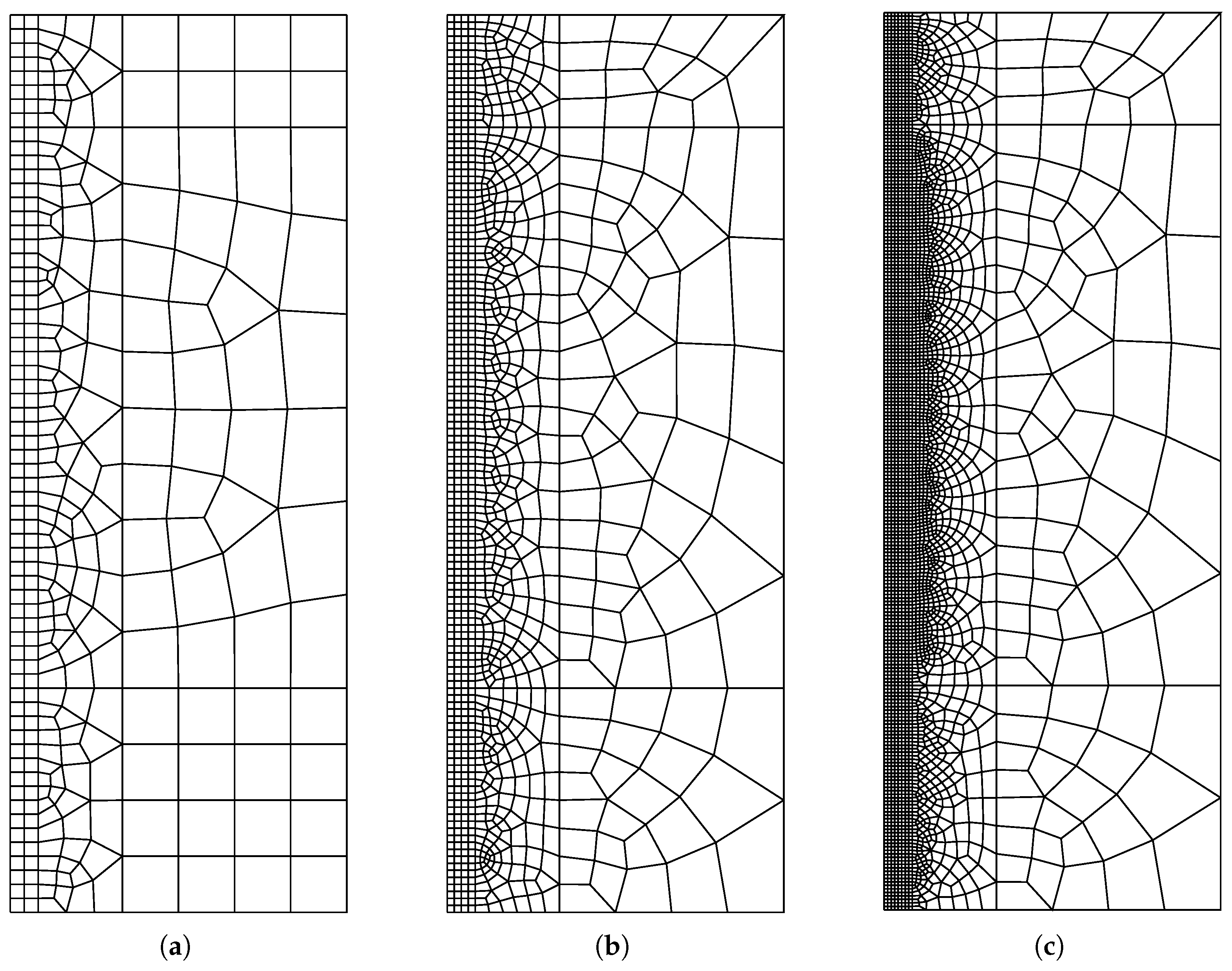
4.2. Finite Element Model
- Fine mesh: Approximately half of the pile shaft radius.
- Medium mesh: Equal to the pile shaft radius.
- Coarse mesh: Two times the pile shaft radius.
4.3. Results and Discussion
4.3.1. Mesh Size Effect
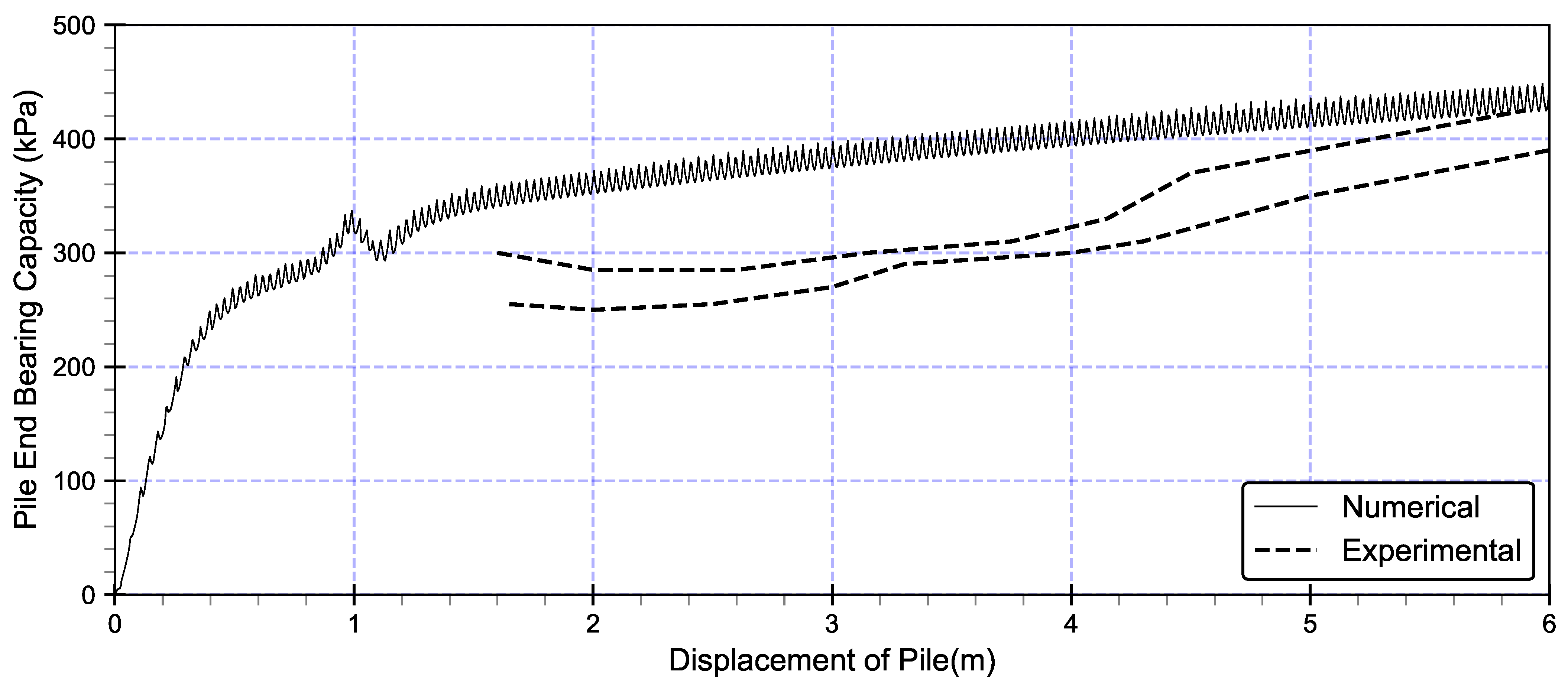
4.3.2. Pile-End Bearing Capacity
4.3.3. Radial Total Stress During Installation
5. ALE Method in Explicit and Implicit Time Integration
5.1. Numerical Model
5.2. Results and Discussion
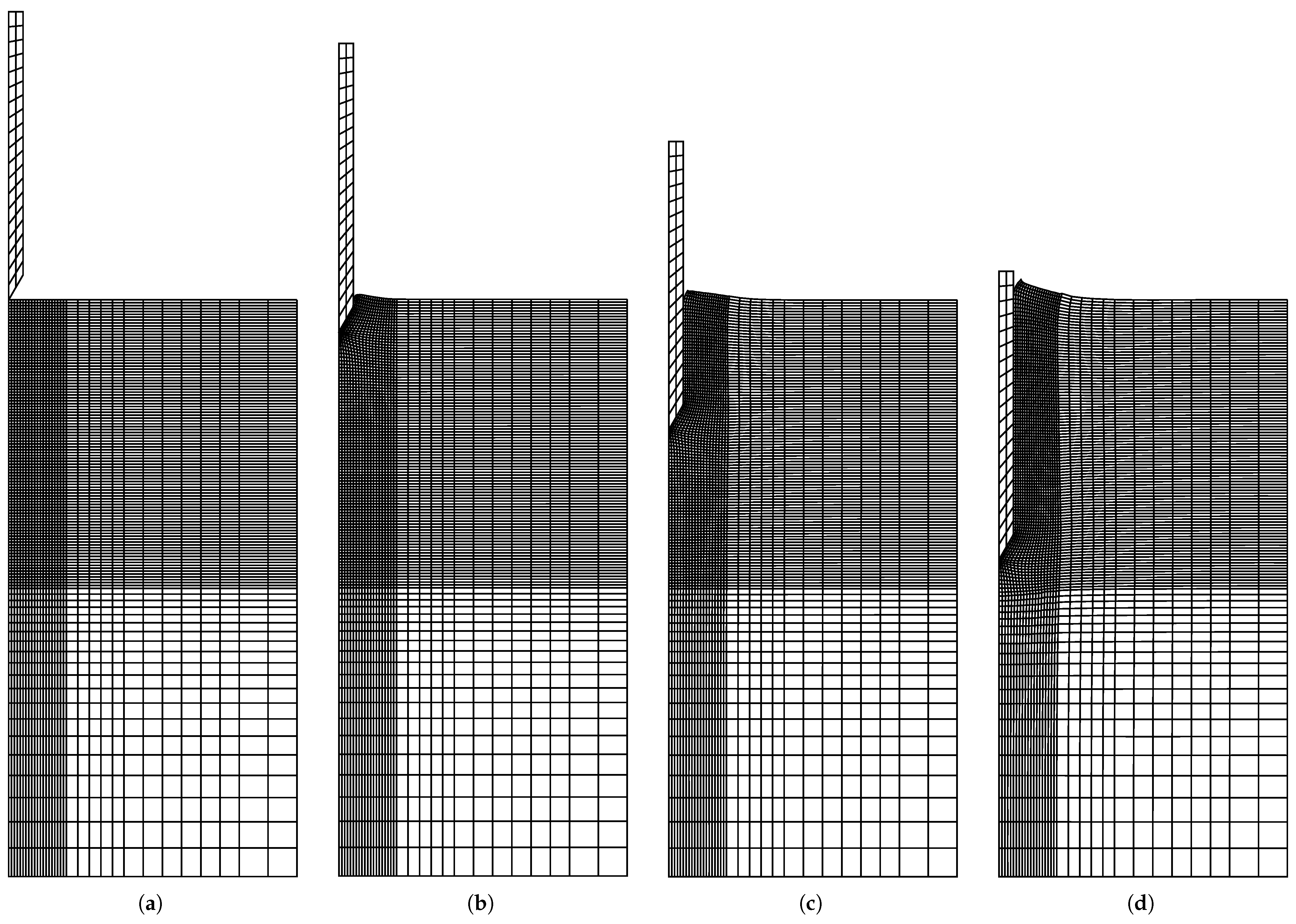
5.2.1. Deformation of the Mesh at Different Depths of Installation
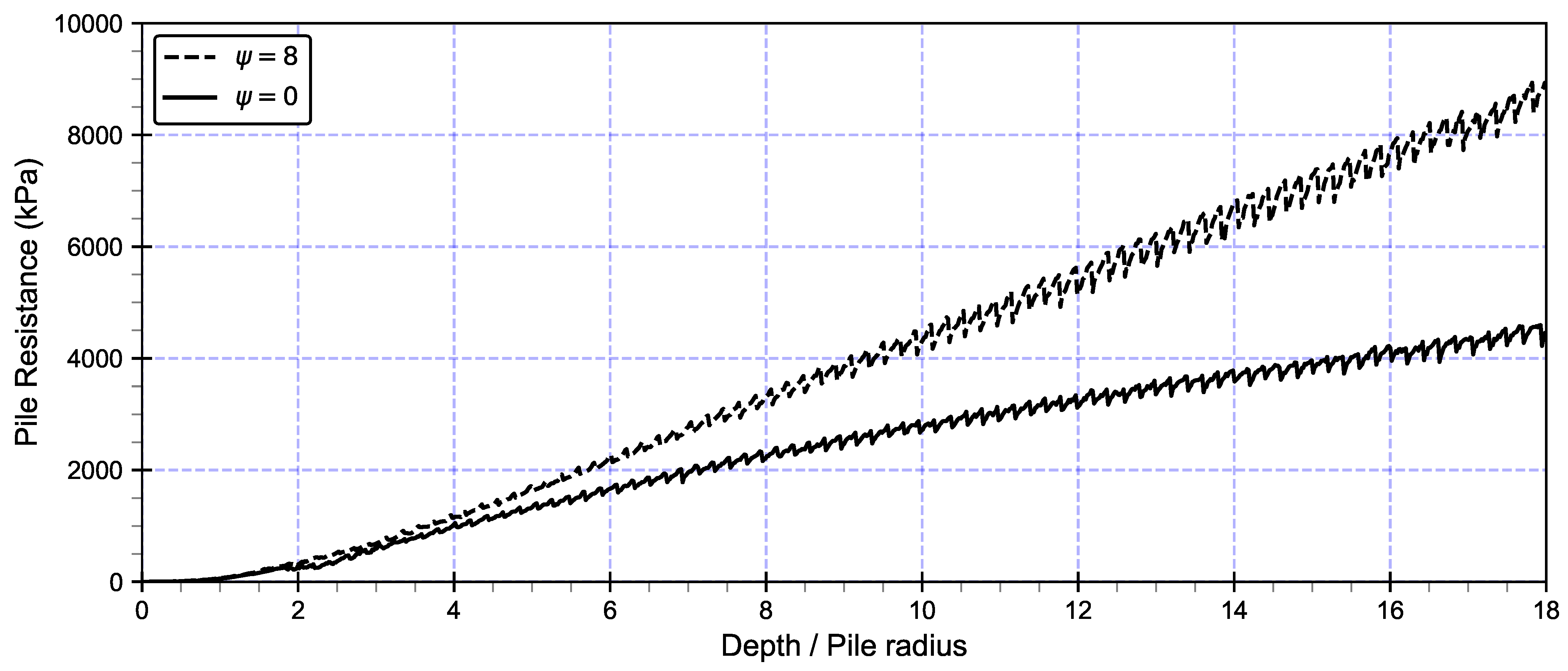
5.2.2. Effect of Dilation Angle on Pile Resistance
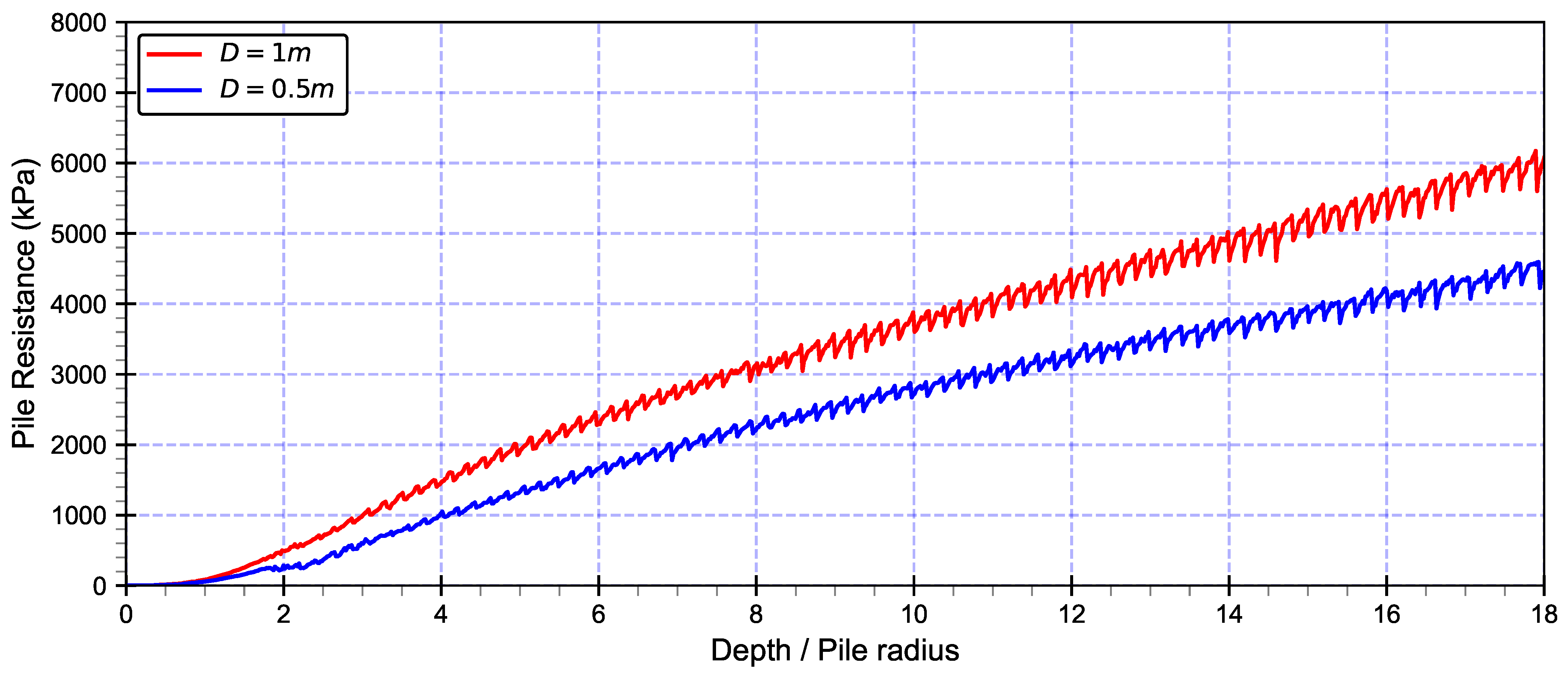
5.2.3. Effect of Pile Dimensions on Pile Resistance
5.2.4. Influence of Soil–Pile Interface Friction on Pile Resistance
5.2.5. Computational Efficiency
6. Conclusions
- The ALE method effectively addressed mesh distortion challenges in both the explicit and implicit schemes without significant computational overhead.
- The computational results from both explicit and implicit schemes indicate that higher interface friction coefficients consistently yield greater total resistance values. Furthermore, the findings indicate that an increase in pile dimension is associated with an enhancement in its overall resistance, primarily due to optimization of the pile-end and shaft friction resistances.
- The explicit time integration scheme demonstrated superior stability and robustness, particularly in cases involving higher friction coefficients, despite characteristic oscillations in the solutions. While the implicit scheme produced smoother solutions, it showed limitations at higher friction coefficients, suggesting reduced effectiveness under complex soil–pile interaction conditions.
- A higher dilation angle () enhances pile resistance by increasing the confining and shaft stress, whereas a lower dilation angle () leads to reduced confinement and lower resistance. These findings align with fundamental principles of soil mechanics, where dilation contributes to increased shear strength and resistance due to volumetric constraints, thereby enhancing the pile resistance.
- The explicit method exhibited lower CPU time requirements, compared to the implicit approach.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sheng, D.; Eigenbrod, K.D.; Wriggers, P. Finite element analysis of pile installation using large-slip frictional contact. Comput. Geotech. 2005, 32, 17–26. [Google Scholar] [CrossRef]
- Fischer, K.A.; Sheng, D.; Abbo, A.J. Modeling of pile installation using contact mechanics and quadratic elements. Comput. Geotech. 2007, 34, 449–461. [Google Scholar] [CrossRef]
- Zhang, M.; Sang, S.; Wang, Y.; Bai, X. Factors Influencing the Mechanical Characteristics of a Pile–Soil Interface in Clay Soil. Front. Earth Sci. 2020, 7, 364. [Google Scholar] [CrossRef]
- Yoo, B.S.; Tran, N.X.; Kim, S.R. Numerical Simulation of Piles in a Liquefied Slope Using a Modified Soil–Pile Interface Model. Appl. Sci. 2023, 13, 6626. [Google Scholar] [CrossRef]
- Lehane, B.M.; Jardine, R.; Bond, A.J.; Frank, R. Mechanisms of shaft friction in sand from instrumented pile tests. J. Geotech. Eng. 1993, 119, 19–35. [Google Scholar] [CrossRef]
- Chow, F.; Jardine, R.J. Investigations into the behaviour of displacement piles for offshore foundations. Ground Eng. 1996, 29, 24–25. [Google Scholar] [CrossRef]
- Jardine, R.J.; Standing, J.R.; Chow, F.C. Some observations of the effects of time on the capacity of piles driven in sand. Géotechnique 2006, 56, 227–244. [Google Scholar] [CrossRef]
- Tsuha, C.; Foray, P.; Jardine, R.; Yang, Z.; Silva, M.; Rimoy, S. Behaviour of displacement piles in sand under cyclic axial loading. Soils Found. 2012, 52, 393–410. [Google Scholar] [CrossRef]
- Arshad, M.I. Experimental Study of the Displacements Caused by Cone Penetration in Sand. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2014. [Google Scholar]
- Jardine, R.; Zhu, B.; Foray, P.; Yang, Z. Interpretation of stress measurements made around closed-ended displacement piles in sand. Géotechnique 2013, 63, 613–627. [Google Scholar] [CrossRef]
- Jardine, R.; Zhu, B.; Foray, P.; Yang, Z. Measurement of stresses around closed-ended displacement piles in sand. Géotechnique 2013, 63, 1–17. [Google Scholar] [CrossRef]
- Rimoy, S.; Silva, M.; Jardine, R.; Yang, Z.X.; Zhu, B.; Tsuha, C.d.H. Field and model investigations into the influence of age on axial capacity of displacement piles in silica sands. Géotechnique 2015, 65, 576–589. [Google Scholar] [CrossRef]
- Tehrani, F.S.; Arshad, M.I.; Prezzi, M.; Salgado, R. Physical modeling of cone penetration in layered sand. J. Geotech. Geoenviron. Eng. 2018, 144, 04017101. [Google Scholar] [CrossRef]
- Tovar-Valencia, R.D.; Galvis-Castro, A.; Salgado, R.; Prezzi, M. Effect of surface roughness on the shaft resistance of displacement model piles in sand. J. Geotech. Geoenviron. Eng. 2018, 144, 04017120. [Google Scholar] [CrossRef]
- Tovar-Valencia, R.D.; Galvis-Castro, A.; Salgado, R.; Prezzi, M.; Fridman, D. Experimental measurement of particle crushing around model piles jacked in a calibration chamber. Acta Geotech. 2023, 18, 1331–1351. [Google Scholar] [CrossRef]
- Sheng, D.; Nazem, M.; Carter, J.P. Some computational aspects for solving deep penetration problems in geomechanics. Comput. Mech. 2009, 44, 549–561. [Google Scholar] [CrossRef]
- Qiu, G.; Henke, S.; Grabe, J. Application of a Coupled Eulerian–Lagrangian approach on geomechanical problems involving large deformations. Comput. Geotech. 2011, 38, 30–39. [Google Scholar] [CrossRef]
- Hamann, T.; Qiu, G.; Grabe, J. Application of a Coupled Eulerian–Lagrangian approach on pile installation problems under partially drained conditions. Comput. Geotech. 2015, 63, 279–290. [Google Scholar] [CrossRef]
- Fan, S.; Bienen, B.; Randolph, M.F. Effects of monopile installation on subsequent lateral response in sand. I: Pile installation. J. Geotech. Geoenviron. Eng. 2021, 147, 04021021. [Google Scholar] [CrossRef]
- Bienen, B.; Fan, S.; Schröder, M.; Randolph, M.F. Effect of the installation process on monopile lateral response. Proc. Inst. Civ. Eng.-Geotech. Eng. 2021, 174, 530–548. [Google Scholar] [CrossRef]
- Staubach, P.; Machaček, J.; Bienen, B.; Wichtmann, T. Long-term response of piles to cyclic lateral loading following vibratory and impact driving in water-saturated sand. J. Geotech. Geoenviron. Eng. 2022, 148, 04022097. [Google Scholar] [CrossRef]
- Staubach, P.; Machaček, J.; Skowronek, J.; Wichtmann, T. Vibratory pile driving in water-saturated sand: Back-analysis of model tests using a hydro-mechanically coupled CEL method. Soils Found. 2021, 61, 144–159. [Google Scholar] [CrossRef]
- Liyanapathirana, D. Arbitrary Lagrangian Eulerian based finite element analysis of cone penetration in soft clay. Comput. Geotech. 2009, 36, 851–860. [Google Scholar] [CrossRef]
- Tolooiyan, A.; Gavin, K. Modelling the cone penetration test in sand using cavity expansion and arbitrary Lagrangian Eulerian finite element methods. Comput. Geotech. 2011, 38, 482–490. [Google Scholar] [CrossRef]
- Yang, Z.; Gao, Y.; Jardine, R.; Guo, W.; Wang, D. Large deformation finite-element simulation of displacement-pile installation experiments in sand. J. Geotech. Geoenviron. Eng. 2020, 146, 04020044. [Google Scholar] [CrossRef]
- Spyridis, M.; Lopez-Querol, S. Numerical investigation of displacement pile installation in silica sand. Comput. Geotech. 2023, 161, 105591. [Google Scholar] [CrossRef]
- Phuong, N.; Van Tol, A.; Elkadi, A.; Rohe, A. Modelling of pile installation using the material point method (MPM). Numer. Methods Geotech. Eng. 2014, 271, 271–276. [Google Scholar] [CrossRef]
- Fu, S.; Yang, Z.; Guo, N.; Jardine, R. Material point method simulations of displacement pile and CPT penetration in sand considering the effects of grain breakage. Comput. Geotech. 2024, 166, 105945. [Google Scholar] [CrossRef]
- Hu, Y.; Randolph, M. A practical numerical approach for large deformation problems in soil. Int. J. Numer. Anal. Methods Geomech. 1998, 22, 327–350. [Google Scholar] [CrossRef]
- Hirt, C.W.; Amsden, A.A.; Cook, J. An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Comput. Phys. 1974, 14, 227–253. [Google Scholar] [CrossRef]
- Nazem, M.; Sheng, D.; Carter, J.P. Stress integration and mesh refinement for large deformation in geomechanics. Int. J. Numer. Methods Eng. 2006, 65, 1002–1027. [Google Scholar] [CrossRef]
- Susila, E.; Hryciw, R.D. Large displacement FEM modelling of the cone penetration test (CPT) in normally consolidated sand. Int. J. Numer. Anal. Methods Geomech. 2003, 27, 585–602. [Google Scholar] [CrossRef]
- Belytschko, T.; Liu, W.K.; Moran, B.; Elkhodary, K. Nonlinear Finite Elements for Continua and Structures; John Wiley & Sons: West Sussex, UK, 2014; pp. 329–415. [Google Scholar]
- Terfaya, N.; Berga, A.; Raous, M.; Abou-Bekr, N. A contact model coupling friction and adhesion: Application to pile/soil interface. Int. Rev. Civ. Eng. 2018, 9, 20. [Google Scholar] [CrossRef]
- Lehane, B.M.; Jardine, R. Displacement-pile behaviour in a soft marine clay. Can. Geotech. J. 1994, 31, 181–191. [Google Scholar] [CrossRef]
- Rezania, M.; Mousavi Nezhad, M.; Zanganeh, H.; Castro, J.; Sivasithamparam, N. Modeling pile setup in natural clay deposit considering soil anisotropy, structure, and creep effects: Case study. Int. J. Geomech. 2017, 17, 04016075. [Google Scholar] [CrossRef]
- Tan, J.P.S.; Goh, S.H.; Tan, S.A. Numerical analysis of a jacked-in pile installation in clay. Int. J. Geomech. 2023, 23, 04023061. [Google Scholar] [CrossRef]
- Li, L.; Zhou, P.; Li, J.; Huang, L.; Shao, W. Numerical simulation of time-dependent performance of jacked piles in marine clays: Considering anisotropy and destructuration. Ocean Eng. 2025, 322, 120461. [Google Scholar] [CrossRef]
- Mabsout, M.E.; Tassoulas, J.L. A finite element model for the simulation of pile driving. Int. J. Numer. Methods Eng. 1994, 37, 257–278. [Google Scholar] [CrossRef]
- Reddy, J.N. Kinematics of a Continuum; Cambridge University Press: Cambridge, UK, 2010; pp. 55–92. [Google Scholar] [CrossRef]
- Wriggers, P. Computational Contact Mechanics; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2006; pp. 11–25. [Google Scholar] [CrossRef]
- Wriggers, P. Nonlinear Finite Element Methods; Springer: Berlin/Heidelberg, Germany, 2008; pp. 205–215. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Sheng, D.; Wriggers, P.; Sloan, S.W. Application of Frictional Contact in Geotechnical Engineering. Int. J. Geomech. 2007, 7, 176–185. [Google Scholar] [CrossRef]
- Donea, J.; Giuliani, S.; Halleux, J.P. An arbitrary Lagrangian-Eulerian finite element method for transient dynamic fluid-structure interactions. Comput. Methods Appl. Mech. Eng. 1982, 33, 689–723. [Google Scholar] [CrossRef]
- Benson, D.J. An efficient, accurate, simple ALE method for nonlinear finite element programs. Comput. Methods Appl. Mech. Eng. 1989, 72, 305–350. [Google Scholar] [CrossRef]
- Bond, A.; Jardine, R. Effects of installing displacement piles in a high OCR clay. Geotechnique 1991, 41, 341–363. [Google Scholar] [CrossRef]
- Dijkstra, J.; Broere, W.; van Tol, A.F. Eulerian Simulation of the Installation Process of a Displacement Pile. In Proceedings of the Contemporary Topics in In Situ Testing, Analysis, and Reliability of Foundations, Orlando, FL, USA, 15 March 2009; American Society of Civil Engineers: Reston, VA, USA, 2009; pp. 135–142. [Google Scholar] [CrossRef]
- Dijkstra, J.; Broere, W.; van Tol, A. Numerical simulation of the installation of a displacement pile in sand. In Proceedings of the 10th International Symposium on Numerical Models in Geomechanics (NUMOG X), Rhodes, Greece, 25–27 April 2007; pp. 461–466. [Google Scholar] [CrossRef]
- Frank, R.; Cuira, F.; Burlon, S. Design of Shallow and Deep Foundations; CRC Press: New York, NY, USA, 2021; pp. 81–181. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Element Sizes (m) | Total N Elements |
|---|---|---|
| Coarse | 0.1 | 425 |
| Medium | 0.05 | 1249 |
| Fine | 0.025 | 3862 |
| Property | Value |
|---|---|
| Weathered Firm Crust | |
| Elastic modulus (MPa) | 3 |
| Poisson’s ratio, | 0.2 |
| Cohesion (kPa) | 6 |
| Friction angle, | 30° |
| Dilation angle, | 0° |
| Dry unit weight (kg/m3), | 1900 |
| Bothkennar Clay | |
| 0.3 | |
| Poisson’s ratio, | 0.2 |
| 0.02 | |
| M | 1.5 |
| Initial void ratio, | 2 |
| Permeability (m/s), k | |
| OCR | 1.5 |
| Lateral stress coefficient, | 0.5 |
| Saturated unit weight (kg/m3), | 1650 |
| Property | Value |
|---|---|
| Pile | |
| Elastic modulus (GPa) | 25 |
| Poisson’s ratio, | 0.3 |
| Soil | |
| Elastic modulus (MPa) | 10 |
| Poisson’s ratio, | 0.3 |
| Cohesion (kPa) | 1 |
| Friction angle, | 37° |
| Dilation angle, | 0–8° |
| Density (kg/m3), | 1700 |
| Schemes | CPU Time (s) | Increments |
|---|---|---|
| Explicit | 370 | 106,051 |
| Implicit | 1569 | 10,014 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bourokba, I.B.; Berga, A.; Staubach, P.; Terfaya, N. Comparative Analysis of ALE Method Implementation in Time Integration Schemes for Pile Penetration Modeling. Math. Comput. Appl. 2025, 30, 58. https://doi.org/10.3390/mca30030058
Bourokba IB, Berga A, Staubach P, Terfaya N. Comparative Analysis of ALE Method Implementation in Time Integration Schemes for Pile Penetration Modeling. Mathematical and Computational Applications. 2025; 30(3):58. https://doi.org/10.3390/mca30030058
Chicago/Turabian StyleBourokba, Ihab Bendida, Abdelmadjid Berga, Patrick Staubach, and Nazihe Terfaya. 2025. "Comparative Analysis of ALE Method Implementation in Time Integration Schemes for Pile Penetration Modeling" Mathematical and Computational Applications 30, no. 3: 58. https://doi.org/10.3390/mca30030058
APA StyleBourokba, I. B., Berga, A., Staubach, P., & Terfaya, N. (2025). Comparative Analysis of ALE Method Implementation in Time Integration Schemes for Pile Penetration Modeling. Mathematical and Computational Applications, 30(3), 58. https://doi.org/10.3390/mca30030058