1. Introduction
Since the 1980s, advancements in science and technology have led to the gradual revelation of a series of physical phenomena known as anomalous diffusion [
1,
2,
3,
4]. These phenomena are complex and difficult to fully explain or accurately model using traditional integer-order diffusion systems. Anomalous diffusion has been demonstrated in various fields, including porous media mechanics [
5], non-Newtonian fluid mechanics [
6], viscoelastic mechanics [
7], and soft matter mechanics [
8,
9]. The fractional diffusion model [
10] is one of the most common models to describe anomalous diffusion behavior. Its advantage lies in its simpler parameters and more convenient numerical calculations. The non-local properties of fractional derivatives [
11] enable them to describe complex non-Markov systems [
12].
Due to the non-local characteristics and complexity of fractional differential equations [
11], obtaining analytical solutions for these equations is extremely challenging. Therefore, developing efficient and accurate numerical algorithms to solve fractional differential equations is crucial. In recent years, numerous meshless methods have been proposed. These methods replace the traditional grid with nodes, thereby avoiding the complicated grid generation process. Meshless methods include the fundamental solution method [
13], Trefftz method [
14], singular boundary method [
15], generalized finite difference method [
16,
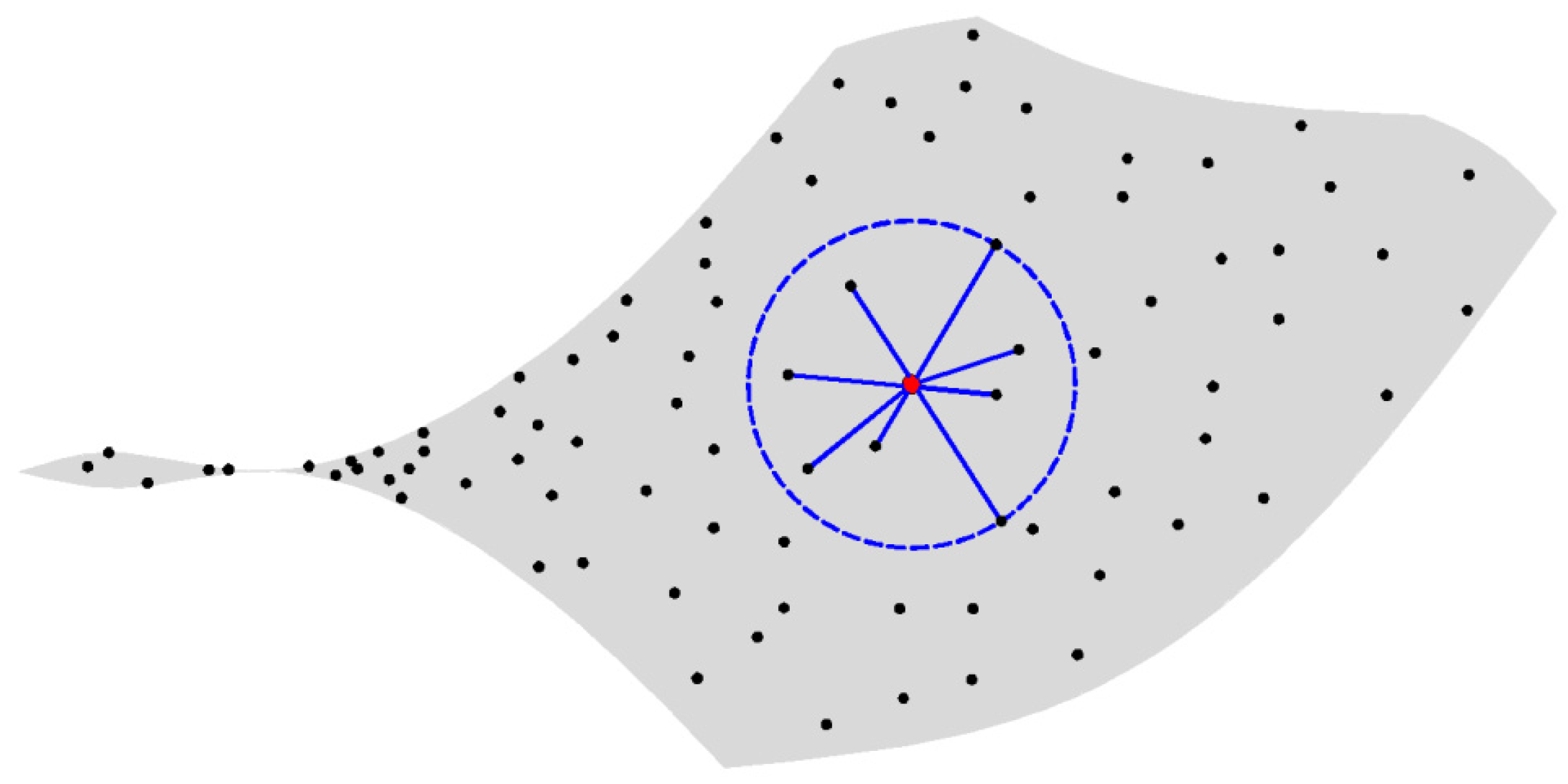
17], etc. The GFDM is a relatively new localized meshless method. First proposed by T. Liszka and J. Orkisz in the 1980s [
18], it has been continuously improved and refined until a relatively complete version was proposed by Benito et al. in 2001 [
19]. The GFDM has been successfully applied in many fields due to its ability to overcome the constraints of traditional regular grids and its capacity to handle complex boundary conditions without the need for extensive preprocessing. Moreover, its localized configuration makes it particularly suitable for dealing with large-scale problems, including obstacle problems [
20], inverse problems [
21], slogging phenomena [
22], etc.
In recent years, with the rapid development of neural network technology, using neural networks to solve inverse problems of anomalous diffusion equations has become increasingly prevalent [
23,
24,
25,
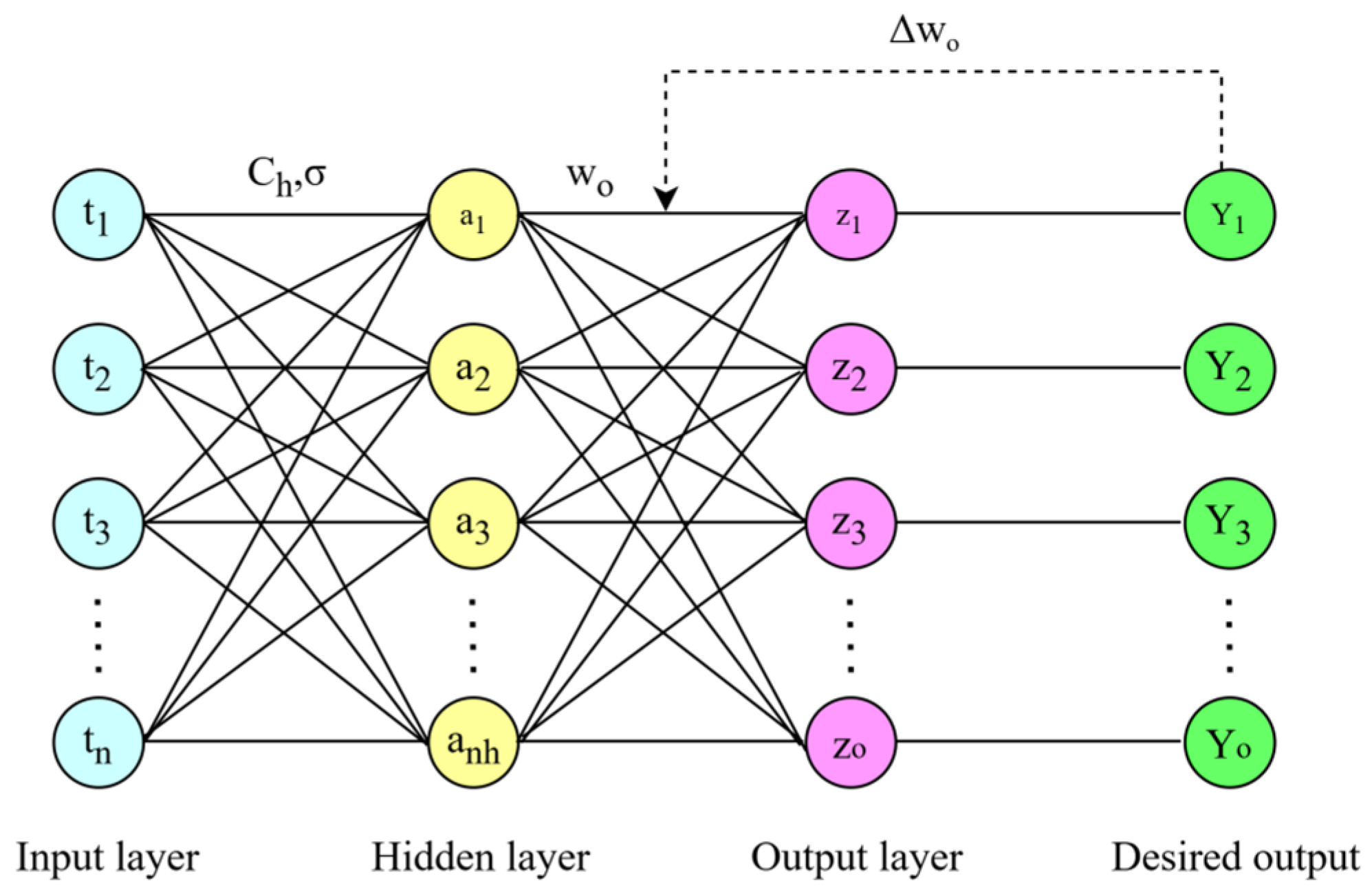
26]. The RBF neural network is a relatively advanced type of three-layer feedforward neural network. Compared with back-propagation (BP) neural networks, RBF neural networks exhibit superior performance in classification accuracy, learning speed, and approximation ability [
27]. An RBF neural network is a kind of neural network with local approximation performance, so an RBF neural network is faster in inversion than other neural networks. In addition, an RBF neural network can accurately invert the results when dealing with the problems in this paper, so an RBF neural network is adopted to invert the parameters.
Compared with other work, this is the first time the inverse surface diffusion problem is solved by combining GFDM and RBF neural networks. In this paper, the time-fractional derivative model is introduced to define the anomalous diffusion process on the surface. In the numerical implementation, the GFDM and the extrinsic processing technique of the surface partial differential equation are employed for the discrete solution. Subsequently, RBF neural networks are introduced into the inverse problem of inverting diffusion equation parameters to obtain the required equation parameters. Specifically, a training database is established by solving the proposed time-fractional diffusion equation using the GFDM.
4. Numerical Results and Discussion
In this section, we combine the GFDM with the RBF neural networks to establish a parameter inversion model for the diffusion equation, based on the results of surface anomalous diffusion. Given that the RBF neural networks demonstrate higher accuracy than other artificial neural networks in parameter inversion, we verify the effectiveness and precision of the RBF neural networks in inverting diffusion coefficients based on surface anomalous diffusion results through the following examples.
In the numerical implementation, the neural network program is executed by MATLAB software R2016b through the ‘newrb’ function in the neural networks’ toolbox. The RBF neural networks iteratively create an RBF network using the function ‘newrb’, the target mean square error is set to 0.01, the radial basis function distribution coefficient is set to 1, the maximum number of neurons is set to 5000, and the number of neurons to be added between each display is set to 25. The optimization method is based on gradient descent.
In the parameter identification stage of the diffusion equation, the simulated diffusion results with an unknown diffusion coefficient at the observation point are input into the trained regression neural networks, and the corresponding parameters can be obtained. Different parameters are randomly generated in the detection domain, and the parameters are brought into the fractional diffusion equation on the surface after the GFDM. A large number of corresponding diffusion results and parameters are calculated as training samples for neural networks to learn. By constantly training and optimizing the weight parameters of the neural networks, a complex nonlinear mapping relationship between the features and labels of the training samples is constructed, and the trained neural networks can be used as a detection tool for the corresponding diffusion results and parameters.
The inversion error of diffusion equation parameters is given as
where
is the error value,
is the target parameter,
is the true value of the target parameter, and
is the inversion value of the target parameter.
Firstly, the inversion of the diffusion coefficient in the diffusion equation in the presence of analytical solutions is considered, and the GFDM approximation is used to invert the diffusion coefficient D. The fractional diffusion equation on a closed smooth surface in three-dimensional space is defined as Equation (1), where
is the diffusion coefficient,
,
, and the analytical solution is given as
In order to verify the accuracy, convergence, and stability of the GFDM for precisely capturing the anomalous diffusion phenomenon on the surface, Root Mean Square Error (RMSE) is introduced to measure it, and its equation is given as follows
where
represents the total number of discrete points of the surface,
represents the numerical solution, and
represents the analytical solution.
At the same time, RBF neural networks and BP neural networks are introduced to invert the parameters, so as to compare the advantages and disadvantages of the two methods in dealing with such problems. The hyperparameter settings are the same for both methods. There is no diffusion at the initial moment. From the initial moment, all the cloth points on the surface of the entire surface begin to diffuse at the same time. The time step is 0.01 s. Different diffusion coefficients are randomly generated in the detection domain, a point is randomly selected among the distribution points of the surface, and 30 points are randomly selected on the surface as observation points. The simulated diffusion results corresponding to diffusion coefficient
D at the observation point of 0.1 s are taken as the input feature
X of the neural networks and diffusion coefficient
D is taken as the output
Y, so that a sample
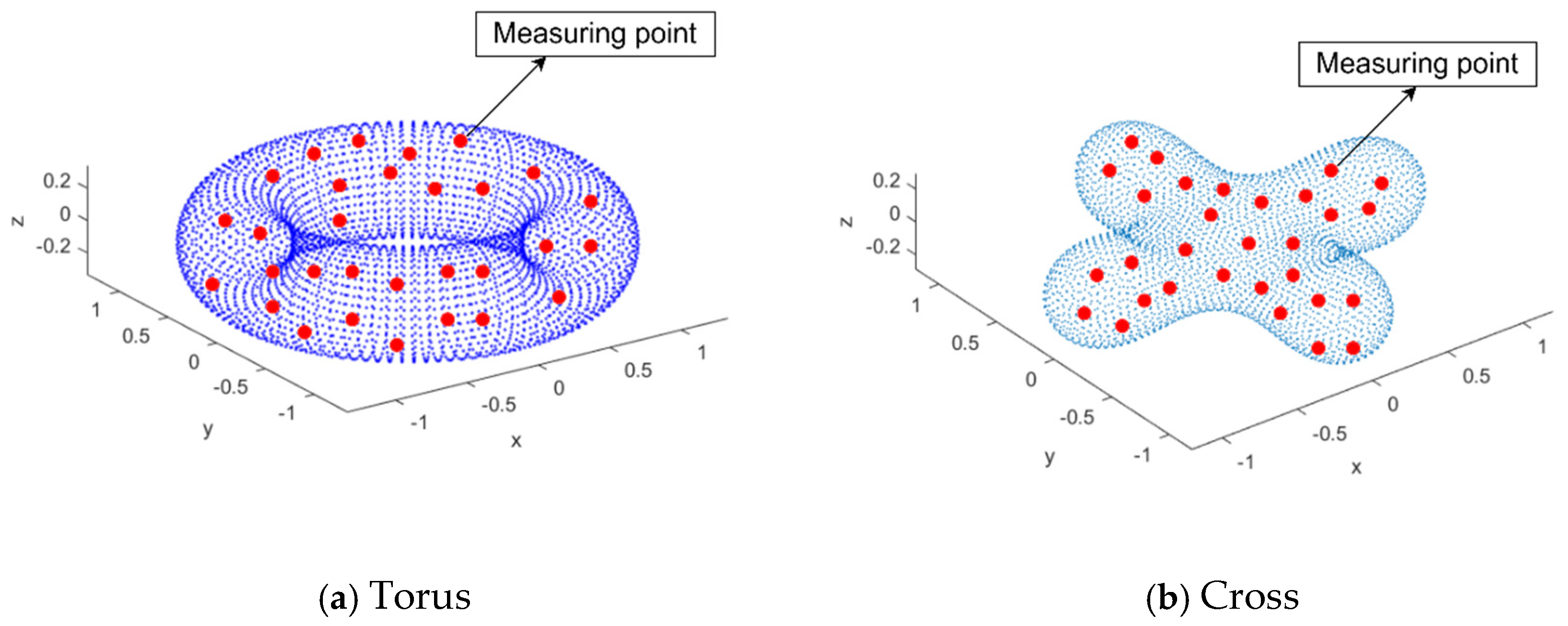
can be constructed. For two different shapes, torus and cross, the number of samples for each shape training is 1000 sets of data. Each set of data contains the diffusion values of thirty detection points at different times. Then, 70% of the samples are divided into a study set and 30% of the samples are divided into verification sets to evaluate the generalization ability of the neural networks. The number of samples for testing is four sets of data, and the test set is not involved in the training of the neural networks.
Figure 3 shows the distribution of distribution points and measuring points when the surface is torus and ellipsoid.
Table 1 shows the RMSE between the GFDM approximation and the analytic solution on different surfaces at
.
Table 2 and
Table 3, respectively, show the inversion results and errors of diffusion coefficients when the surface is torus and cross.
From
Table 1, it can be observed that for different models, the RMSE is in the order of
. The numerical results clearly demonstrate that the GFDM can precisely capture the anomalous diffusion phenomenon on the surface and accurately approximate analytical solutions. However, the limitation of GFDM is that it is difficult to obtain accurate results when it is used to deal with non-smooth, non-closed, and asymmetrical surface models. For future research, more widely used numerical methods may be needed to solve such problems, such as finite element methods.
From
Table 2 and
Table 3, it can be observed that for both methods, the predicted value of diffusion coefficient D is almost consistent with the actual value on different models. The error is in the order of
. However, the inversion speed of an RBF neural network is significantly faster than that of a BP neural network. Therefore, the proposed model can achieve the fast and accurate inversion of diffusion coefficient D in the case of analytic solutions.
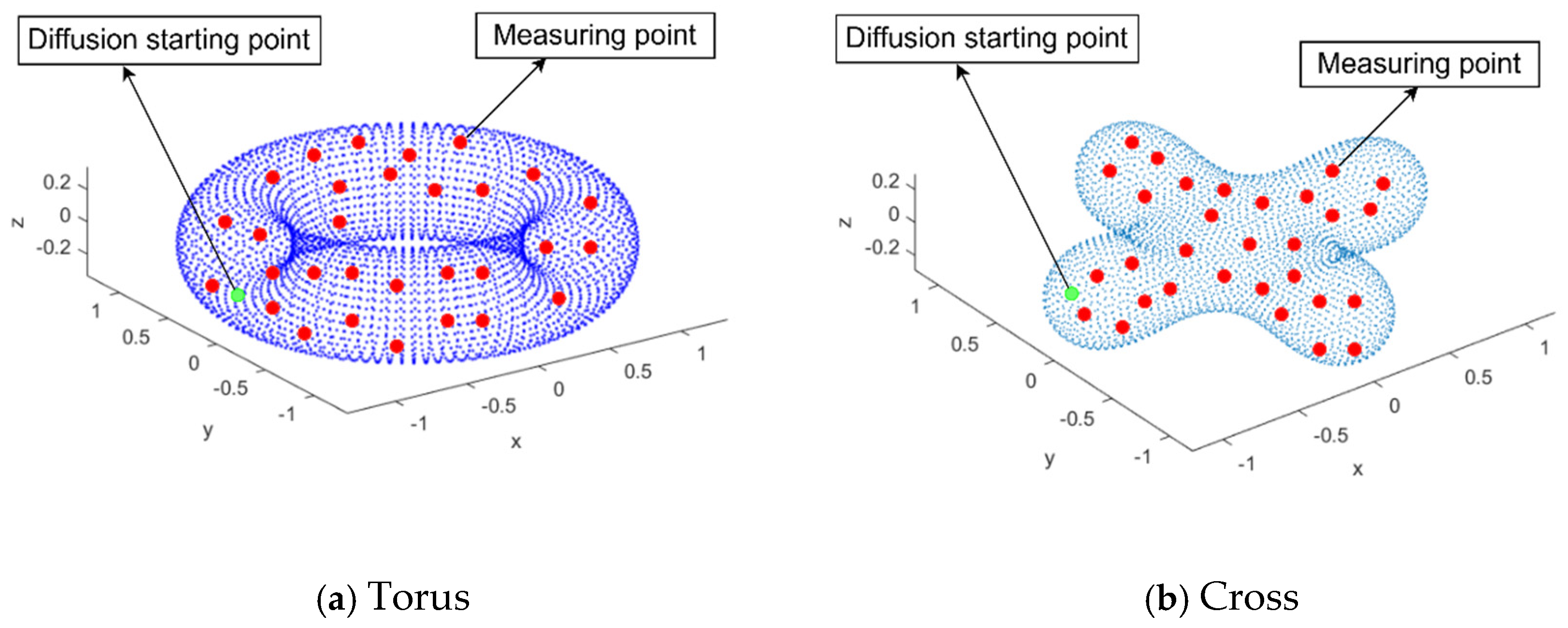
In this case, there is no analytical solution to the equation, and the GFDM approximation is used to invert diffusion coefficient D. A total of 30 points on the surface are ramdonly selected as observation points. The time step is 0.01 s. The simulated diffusion results corresponding to diffusion coefficient D at the observation point of 0.1 s is taken as the input feature X of the neural networks. Diffusion coefficient D is taken as output Y, so that a sample
can be constructed. For two different shapes, torus and cross, the number of samples for each shape training is 1000 sets of data. Each set of data contains the diffusion values of thirty detection points at different times. Then, 70% of the samples are divided into a study set and 30% of the samples are divided into verification sets to evaluate the generalization ability of the neural networks. The number of samples for testing is four sets of data, and the test set is not involved in the training of the neural networks.
Figure 4 shows a schematic diagram of point sources and measuring points when the surface is torus and ellipsoid.
Table 4 and
Table 5 show the inversion results and errors of diffusion coefficients when the surface is torus and cross, respectively.
From
Table 4 and
Table 5, it can be observed that for different models, the predicted value of diffusion coefficient D is almost consistent with the actual value, and the error is in the order of
. Therefore, the proposed model can achieve accurate inversion of diffusion coefficient D in the absence of an analytic solution.
Based on the inversion of the diffusion coefficient and source term coefficient in the previous example, the diffusion coefficient and source term coefficient will be further inverted at the same time. Since the observed data in practical applications often contain noise (especially Gaussian noise), to verify the numerical performance of RBF neural networks under different noise levels, this paper adds Gaussian noise at different levels to the data, and the noise is added in the following way
where
is noise level,
is the standard deviation of the whole observed dataset,
is the probability density function, and
is the standard normal distribution.
The fractional diffusion equation on a closed smooth surface in three dimensions is given as
where
is the diffusion coefficient,
, source term coefficient
, and the analytical solution is given as
There is no diffusion at the initial moment, and from the initial moment, all the cloth points on the surface of the entire surface begin to diffuse at the same time and the time step is 0.01 s. In the detection domain, different diffusion coefficients D and source term coefficients d are randomly generated. Then, 30 points on the surface are randomly selected as observation points. The simulated diffusion results corresponding to diffusion coefficient D and source term coefficient d at 0.1 s of the observation point are taken as the input feature X of the neural networks, and diffusion coefficient D and source term coefficient d are taken as the output Y. This allows you to construct a sample
. For three different shapes, spherical surface, torus, and cross, the number of samples for each shape training is 1000 sets of data. Each set of data contains the diffusion values of thirty detection points at different times. Then, 70% of the samples are divided into a study set and 30% of the samples are divided into verification sets to evaluate the generalization ability of the neural networks. The number of samples for testing is six sets of data, and the test set is not involved in the training of the neural networks.
Table 6,
Table 7 and
Table 8 show the inversion results and errors of diffusion coefficient D and source coefficient d when the surface is spherical, torus, and cross, respectively. The noise level considers interference with the inversion error at 0%, 1%, and 5%.
From
Table 6,
Table 7 and
Table 8, it can be observed that for different models, the predicted values of the diffusion coefficient and source coefficient are almost consistent with the actual values, and the error is in the order of
. Therefore, the proposed model can achieve joint inversion of the diffusion coefficient and source coefficient more accurately. At the same time, it can be noted that when the noise level increases, the inversion error will increase, but in an acceptable range.
In this example, the diffusion coefficient and the fractional order will be inverted at the same time. The fractional diffusion equation on a closed smooth surface in three dimensions is defined as Equation (26), where is the diffusion coefficient, , source term coefficient , and the analytical solution is given as Equation (27).
The time step is 0.01 s. In the detection domain, different diffusion coefficients D and fractional orders
are randomly generated. Then, 30 points on the surface are randomly selected as observation points. The simulated diffusion results corresponding to diffusion coefficient D and fractional order
at 0.1 s of the observation point are taken as the input feature X of the neural networks, and diffusion coefficient D and fractional order
are taken as the output Y. This allows you to construct a sample
. For two different shapes, spherical surface and torus, the number of samples for each shape training is 1000 sets of data. Each set of data contains the diffusion values of thirty detection points at different times. Then, 70% of the samples are divided into a study set and 30% of the samples are divided into verification sets to evaluate the generalization ability of the neural networks. The number of samples for testing is six sets of data, and the test set is not involved in the training of the neural networks.
Table 9 and
Table 10 show the inversion results and errors of diffusion coefficient D and fractional order
when the surface is spherical and torus, respectively.
From
Table 9 and
Table 10, it can be observed that for different models, the predicted values of the diffusion coefficient and fractional order are almost consistent with the actual values, and the error is in the order of
. Therefore, the proposed model can achieve joint inversion of the diffusion coefficient and fractional order more accurately. Furthermore, the numerical results obtained in these examples clearly demonstrate that RBF neural networks can invert the parameters of the diffusion equation with high accuracy. The hybrid method based on the GFDM and RBF neural networks can accurately invert the parameters even if there is an analytic solution of the equation.
In fact, during the input of training samples, the inversion result is relatively accurate only when the diffusion coefficient and the order increase or decrease concurrently. If the diffusion coefficient and the order change irregularly, it is very difficult to accurately invert the sought-after result. In order to obtain the result accurately when the desired parameter changes irregularly, it may be necessary to introduce a more advanced neural grid, such as PINNs.



{kind=link}
{kind=link}
{kind=link}
{kind=link}