First Order Hadamard Variation of the Harmonic Navigation Function on a Sphere World

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Navigation Functions
- 1.
- Analytic on the interior of ,
- 2.
- Polar on with a minimum at an interior point ,
- 3.
- Admissible on ,
- 4.
- Morse on Ω.
2.2. Semi-Analytical Approximation of the Green’s Function for the Laplacian Operator
2.2.1. Green’s Function
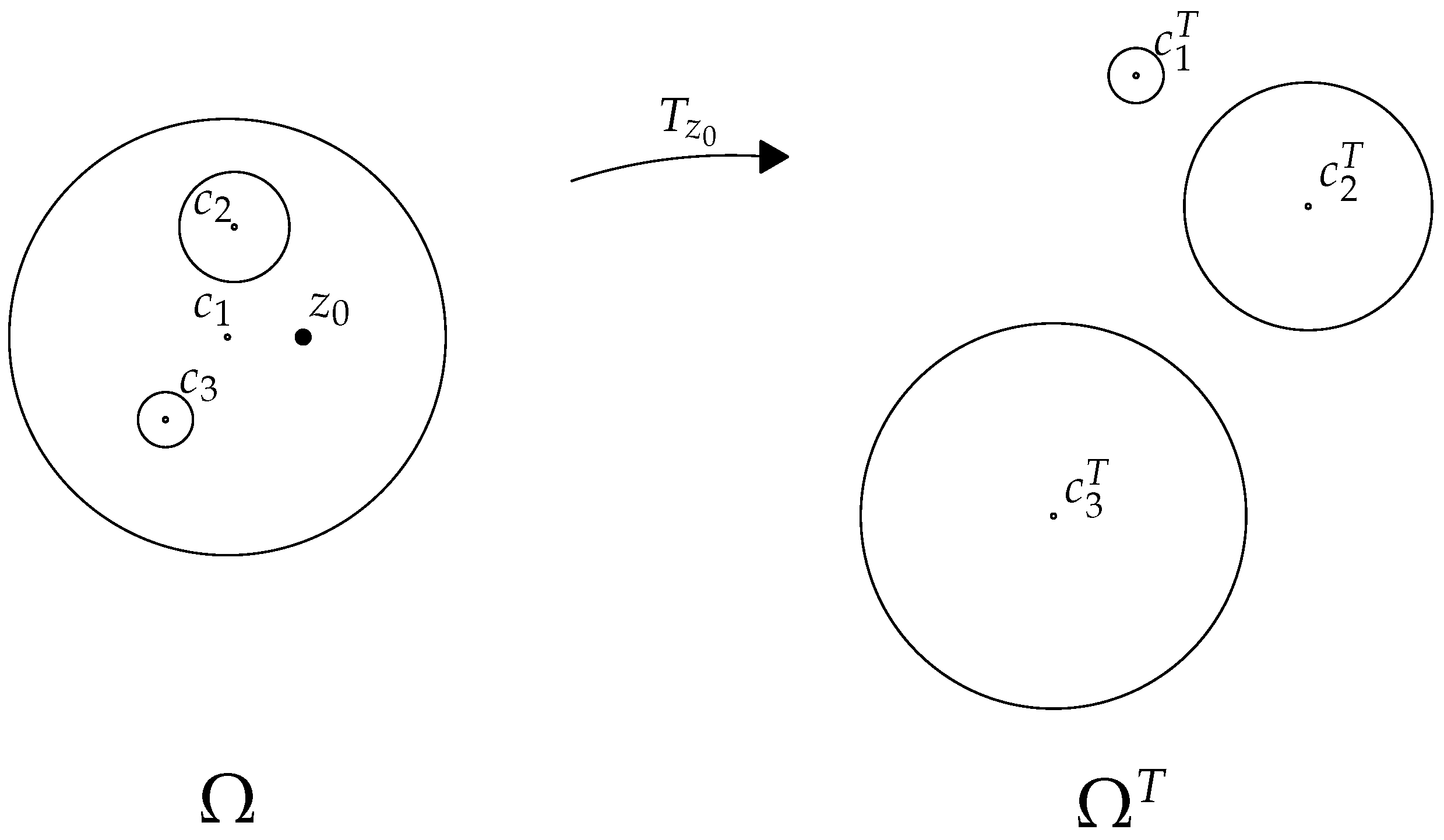
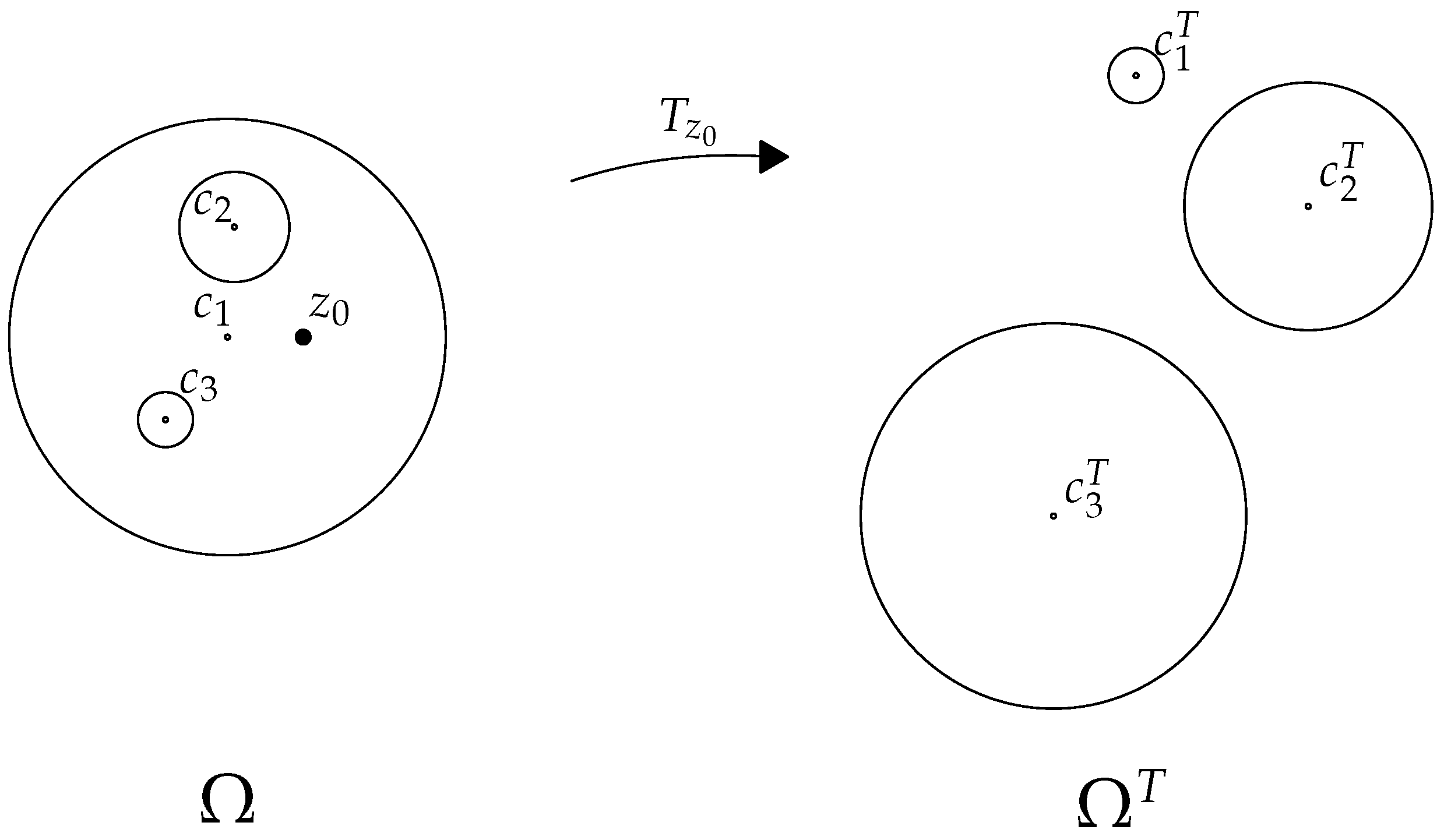
2.2.2. Green’s Function from Conformal Mappings
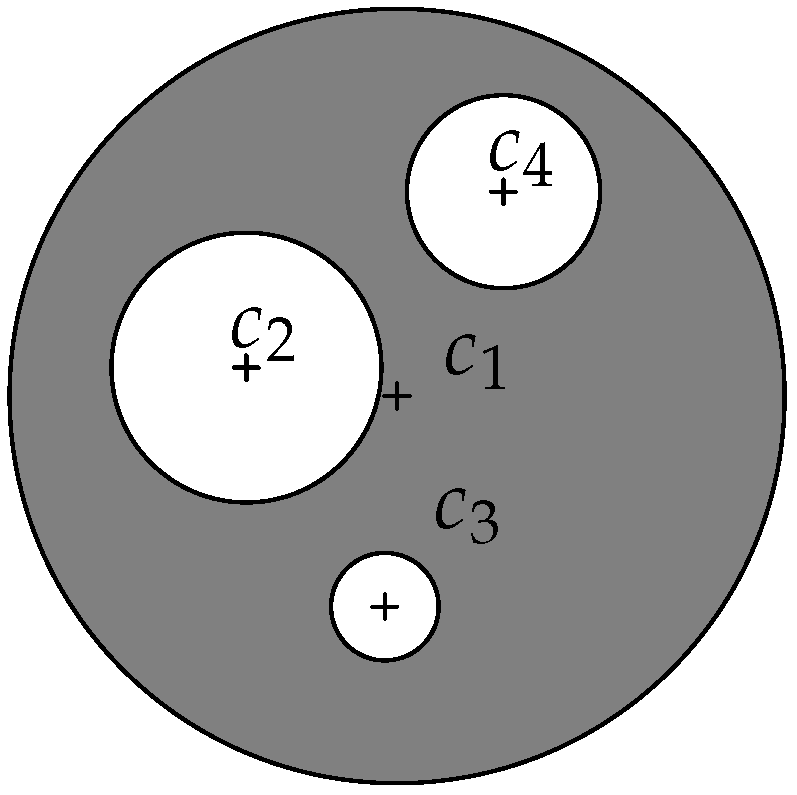
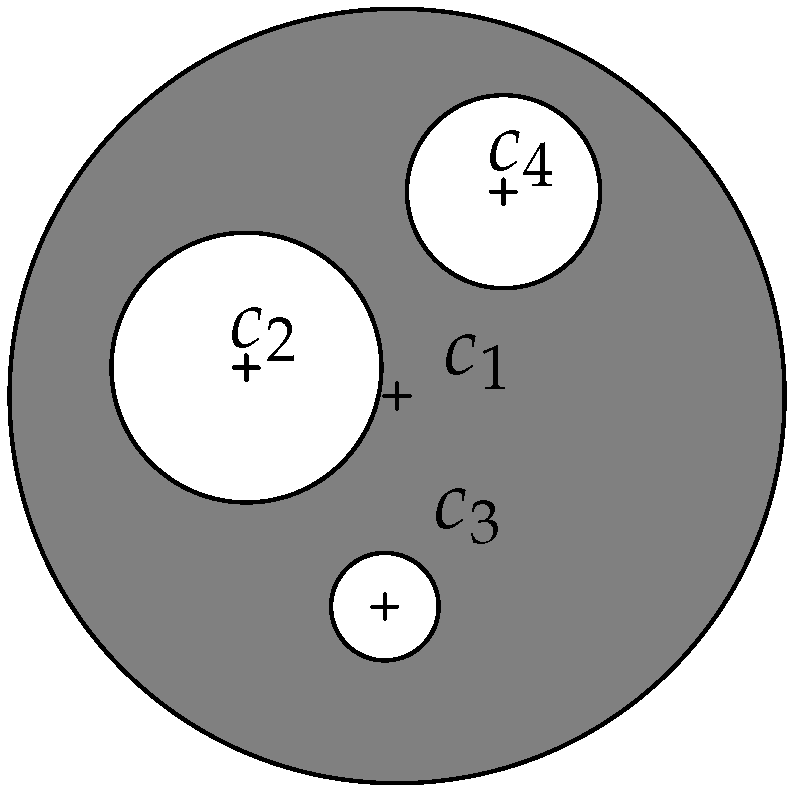
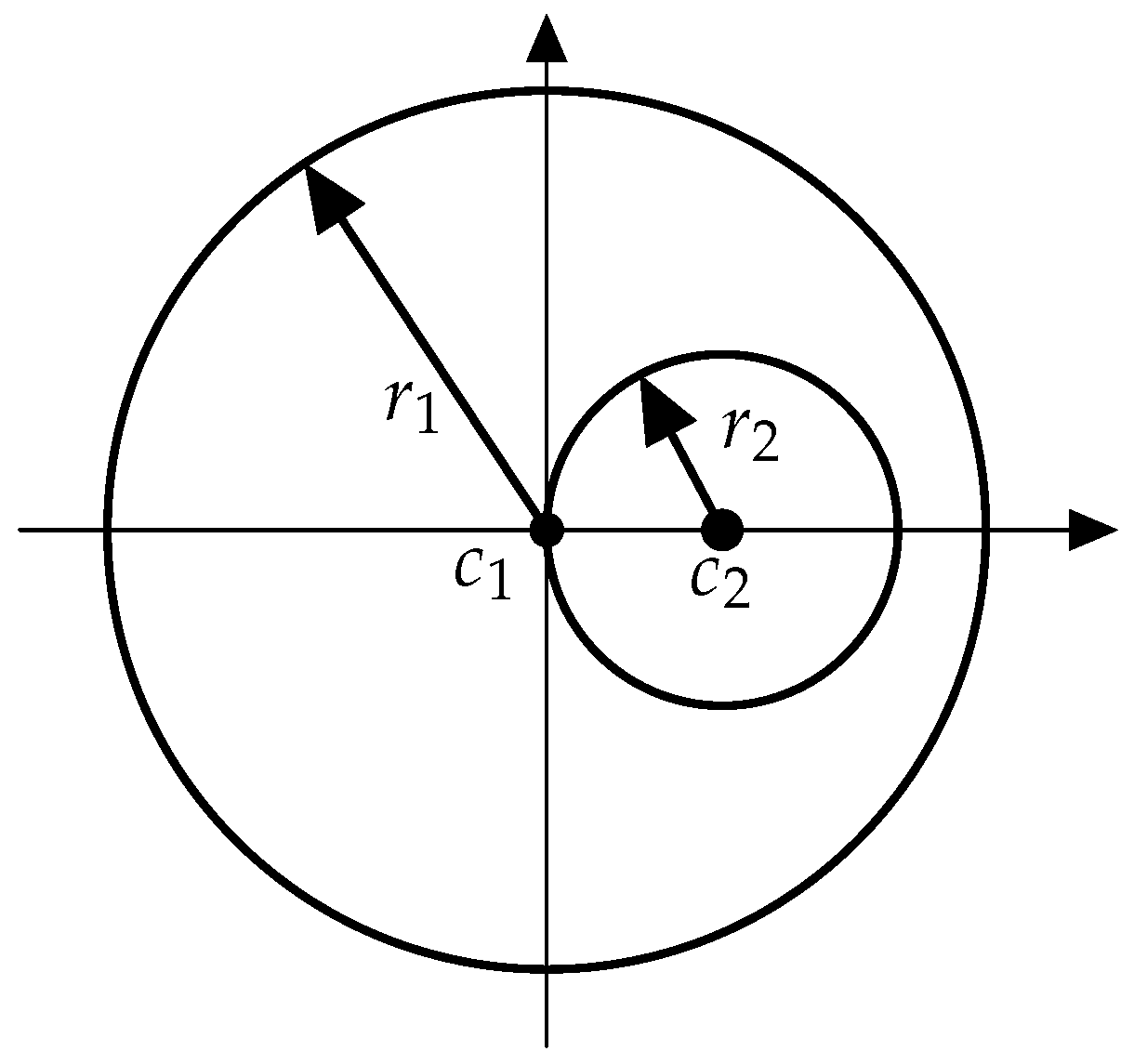
2.2.3. Harmonic Function Exterior to Non-Overlapping Disks
2.3. First Order Variation of the Harmonic Solution
3. Results and Discussion
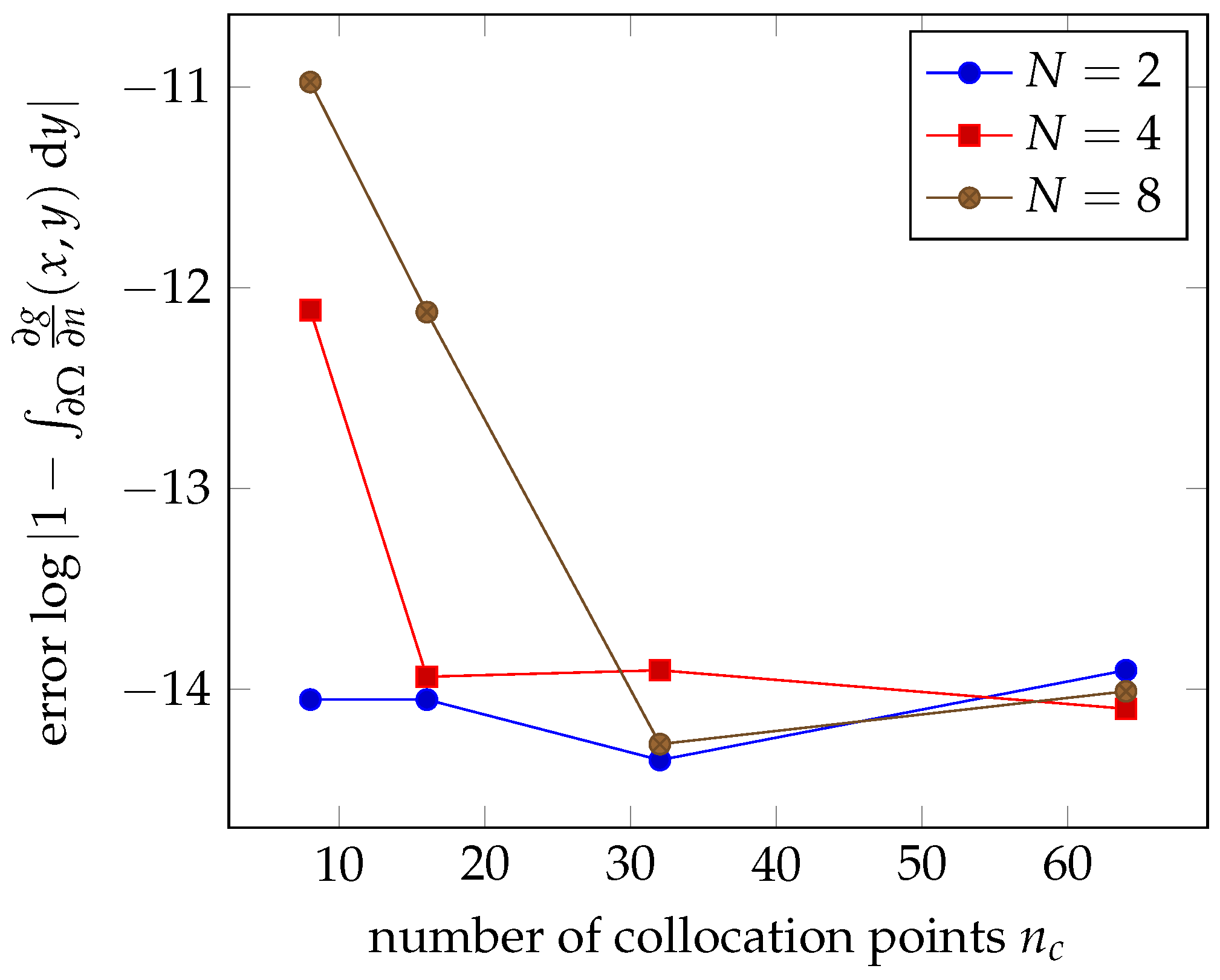
3.1. Numerical Validation of the Green’s Function Approximation
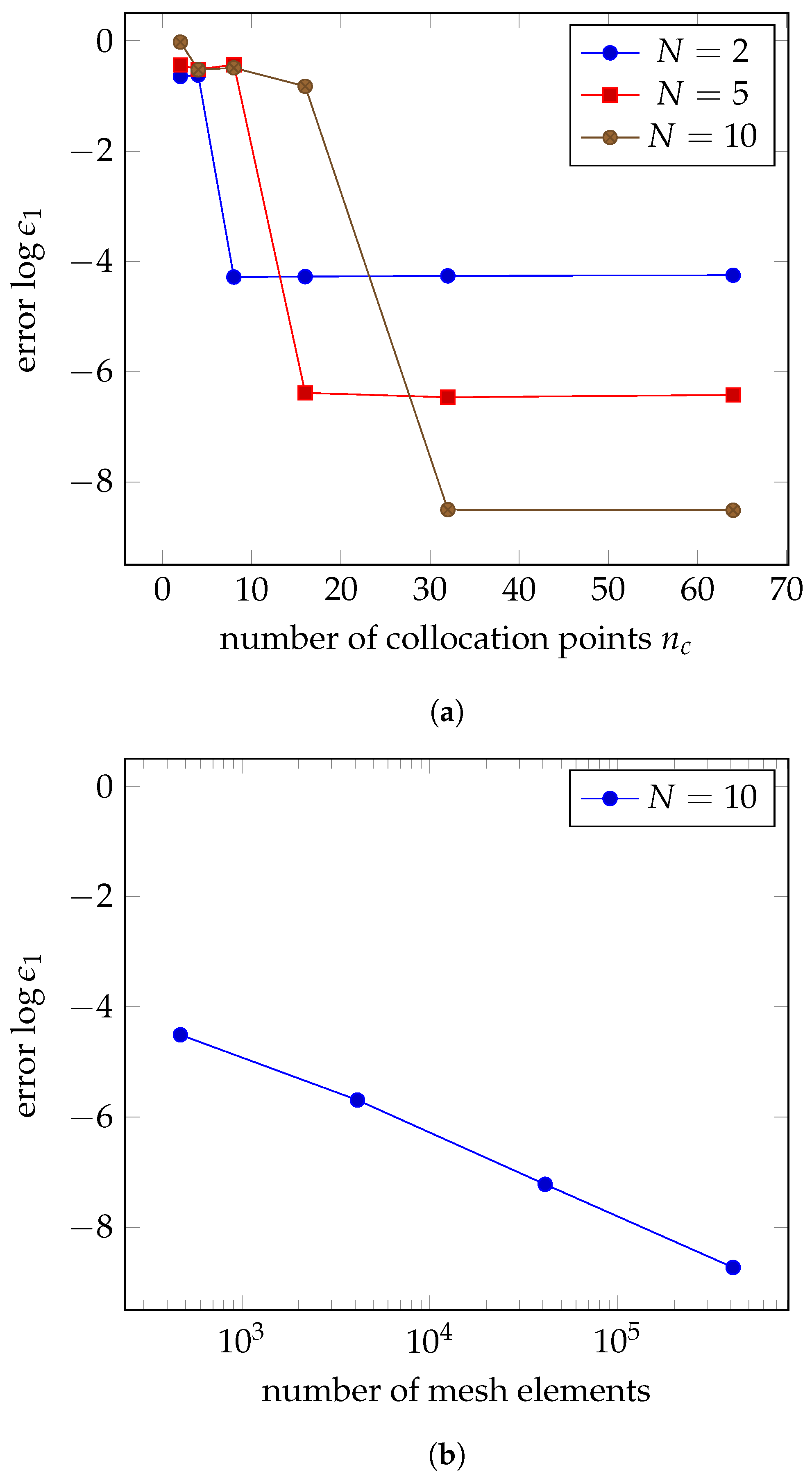
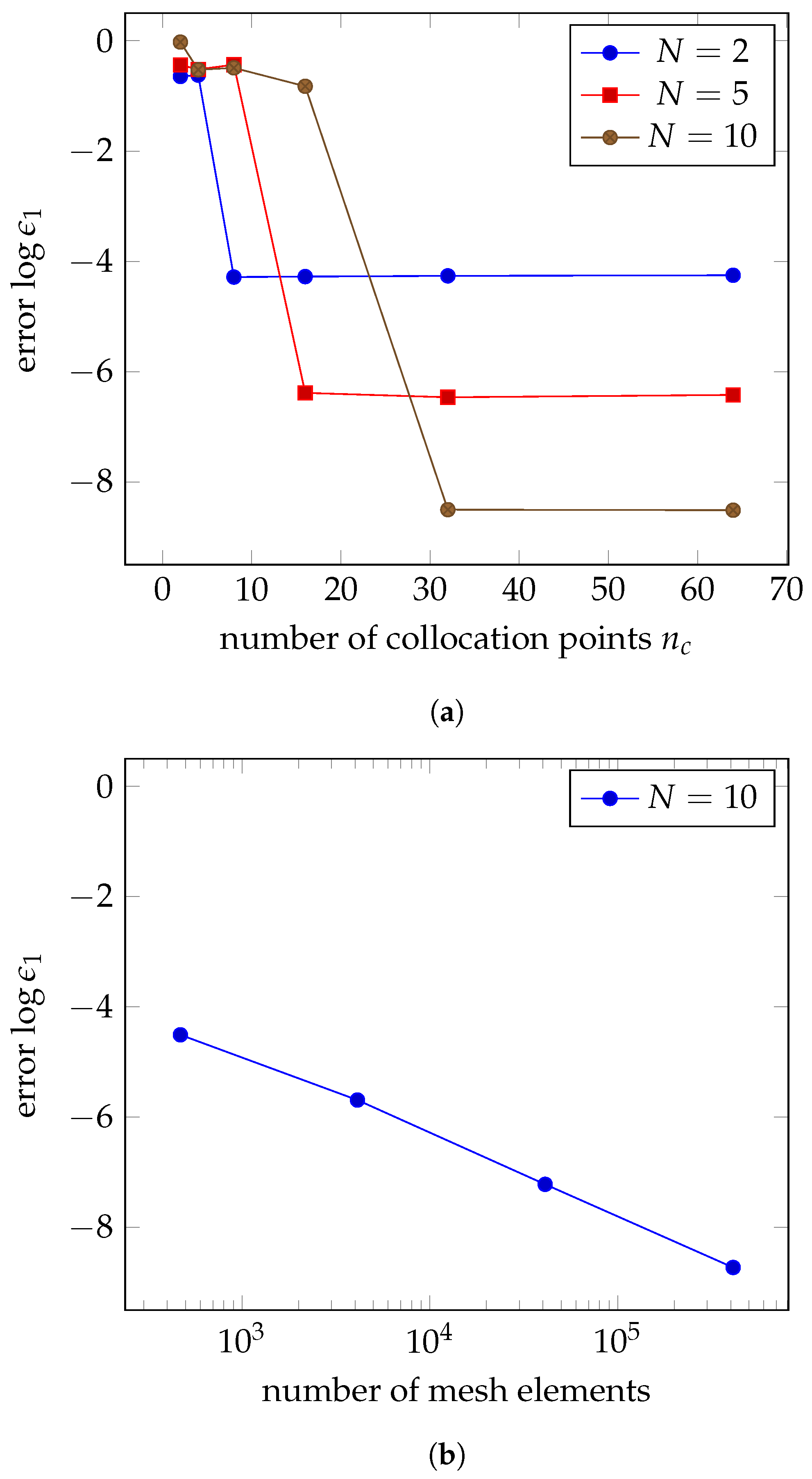
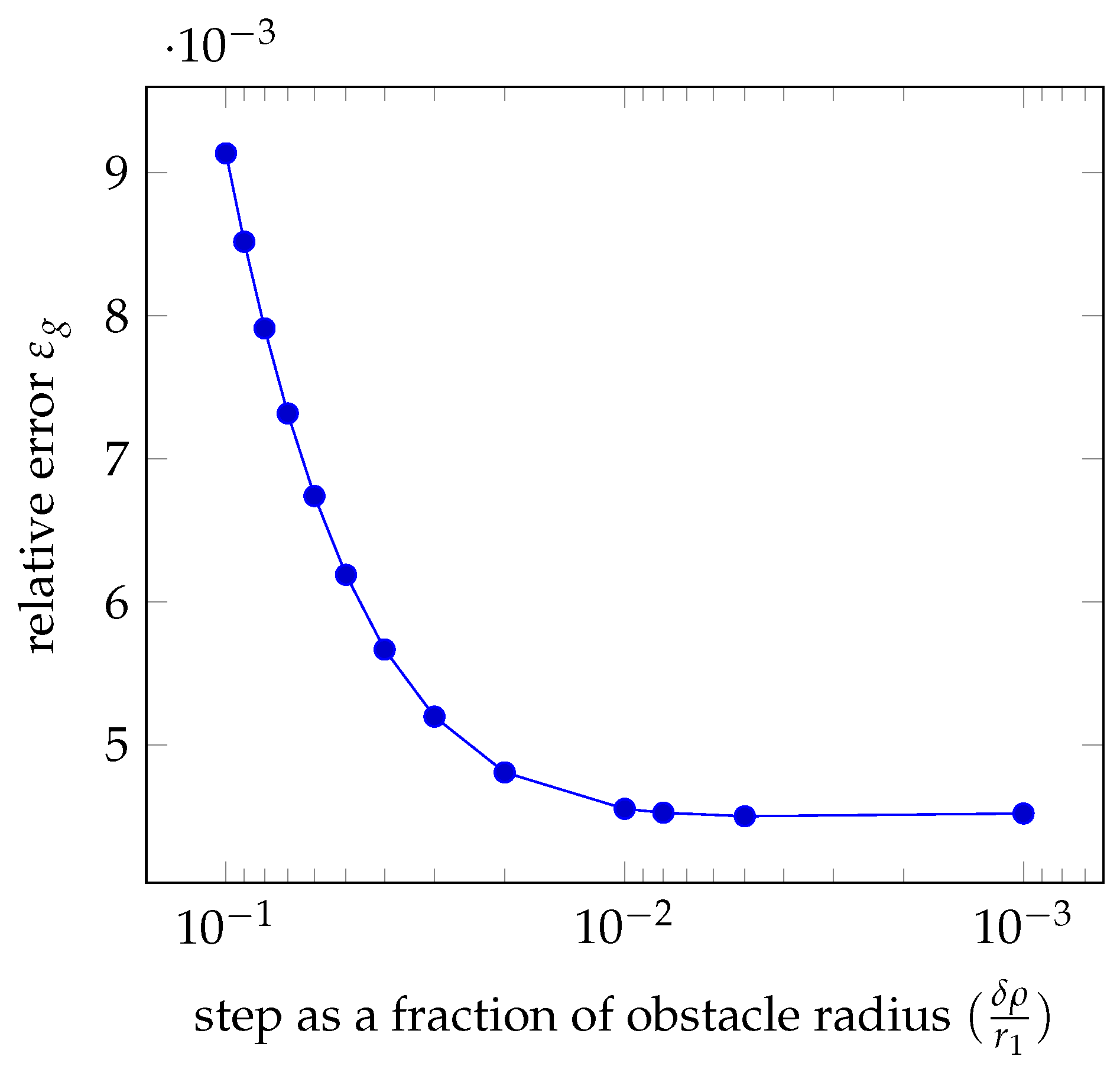
3.1.1. Convergence of the Method
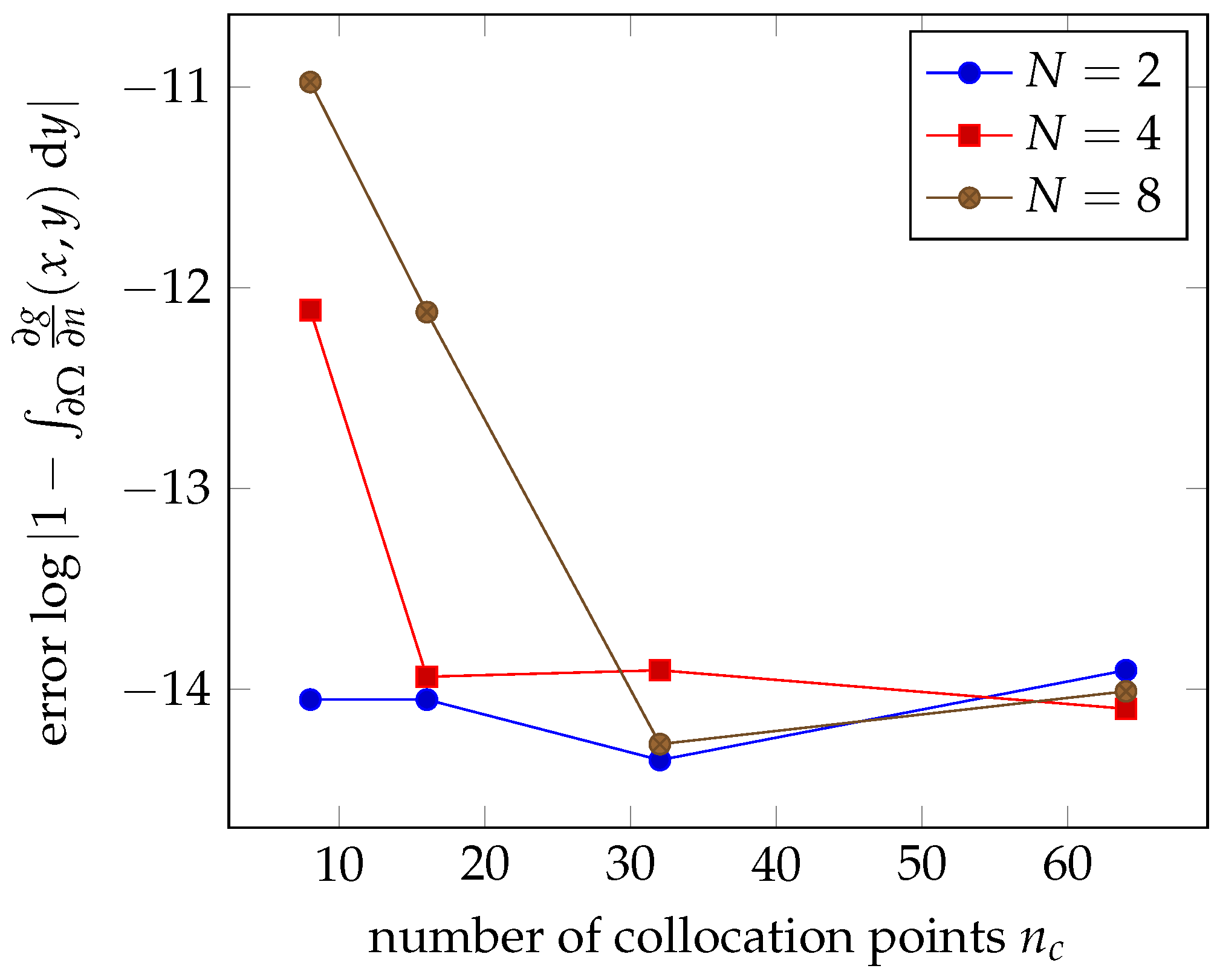
3.1.1.1. Reconstruction of the Harmonic Solution for Constant Boundary Conditions
3.1.1.2. Reconstruction for Non-Constant Boundary Conditions
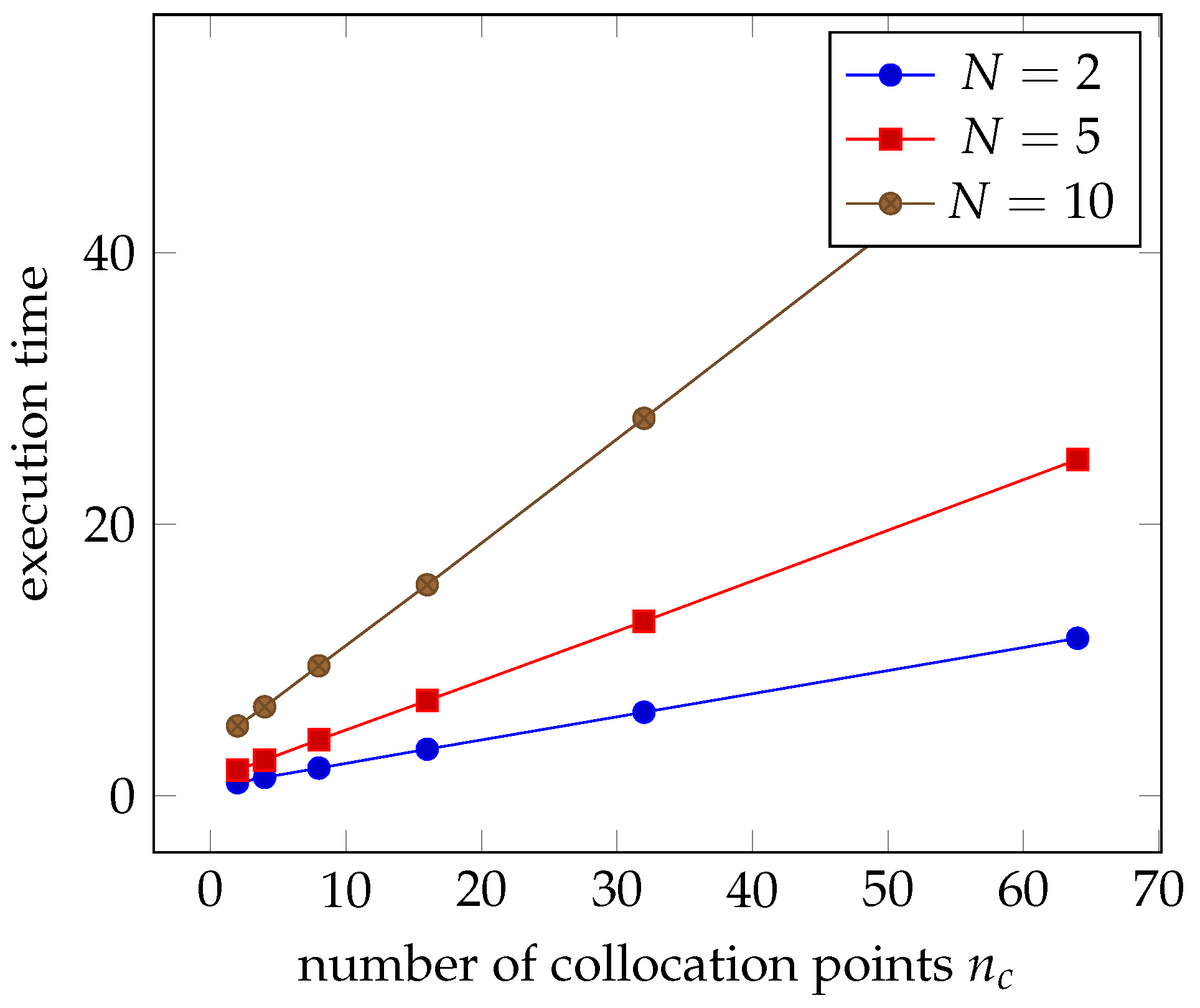
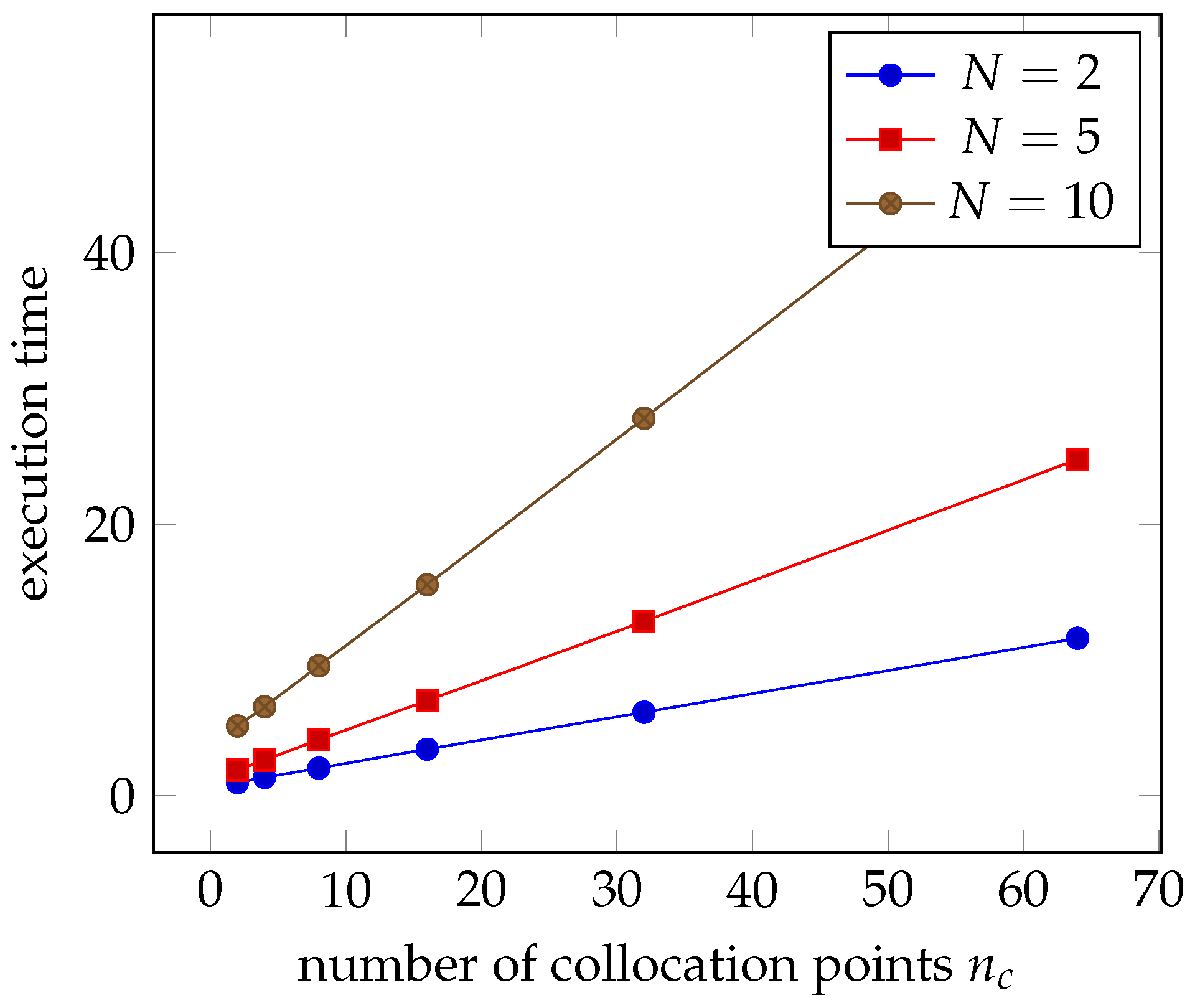
3.1.2. Time Complexity
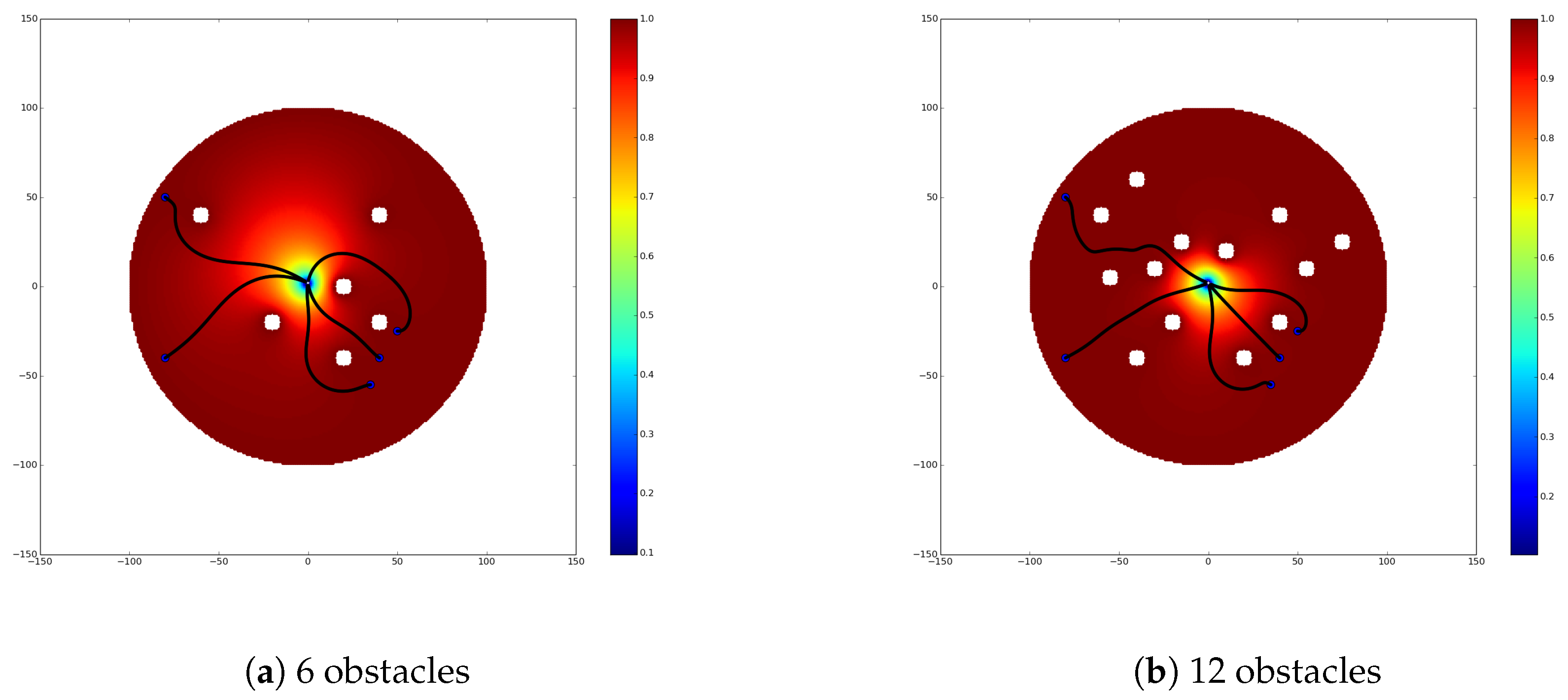
3.1.3. Possible Applications of the Solution
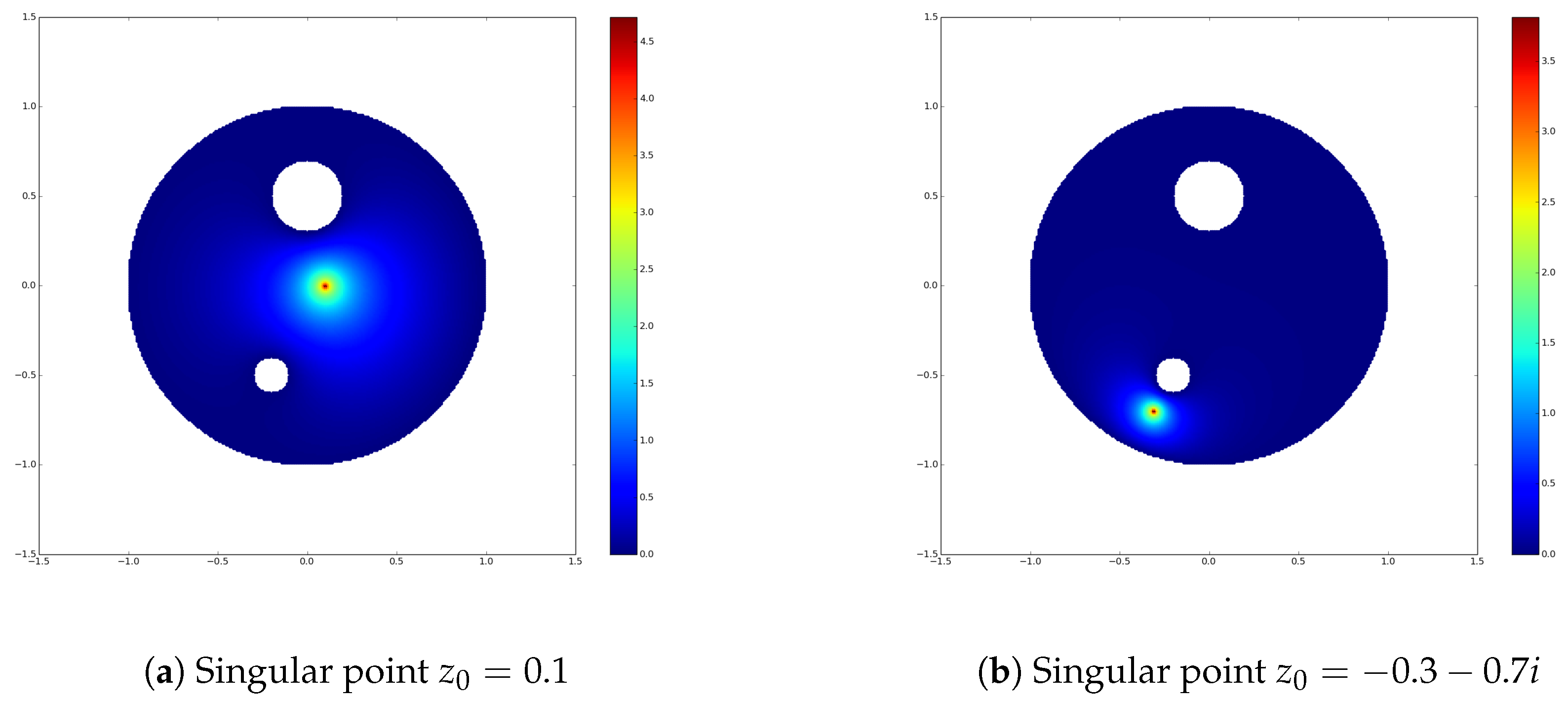
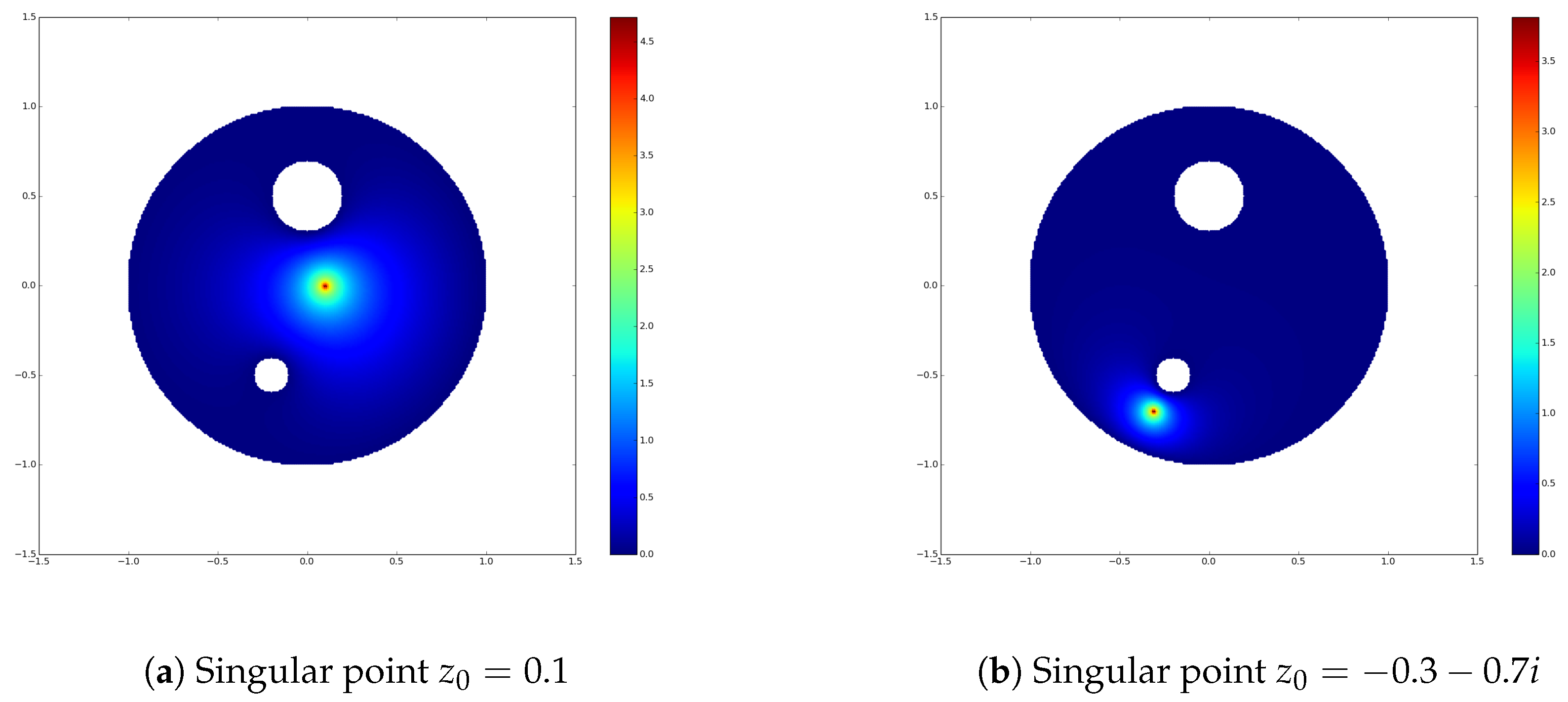
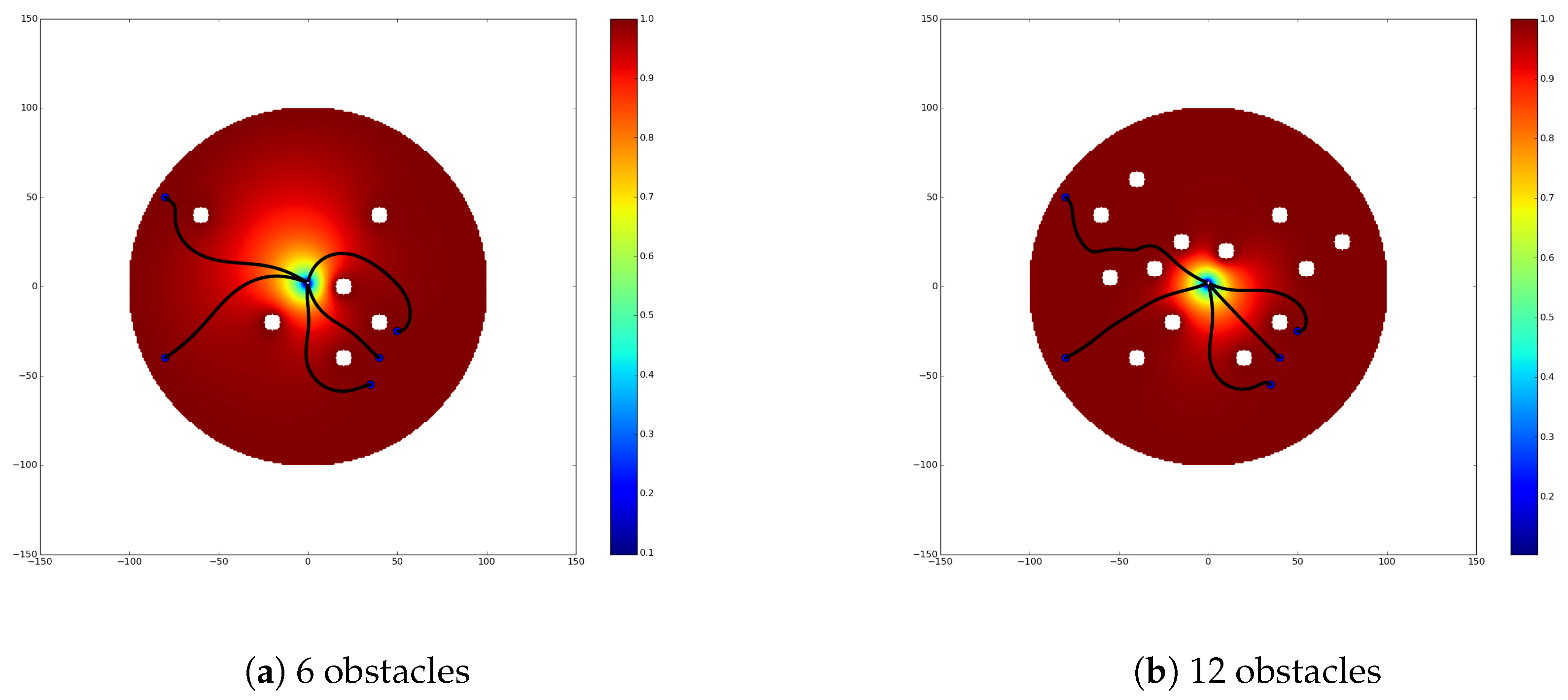
3.1.3.1. Green’s Function of Sphere Worlds
3.2. Numerical Validation of the Hadamard Variation of the Green’s Function
- by varying the center of the obstacle disc, which is representative of the effect of a locally constant wind on an aircraft.
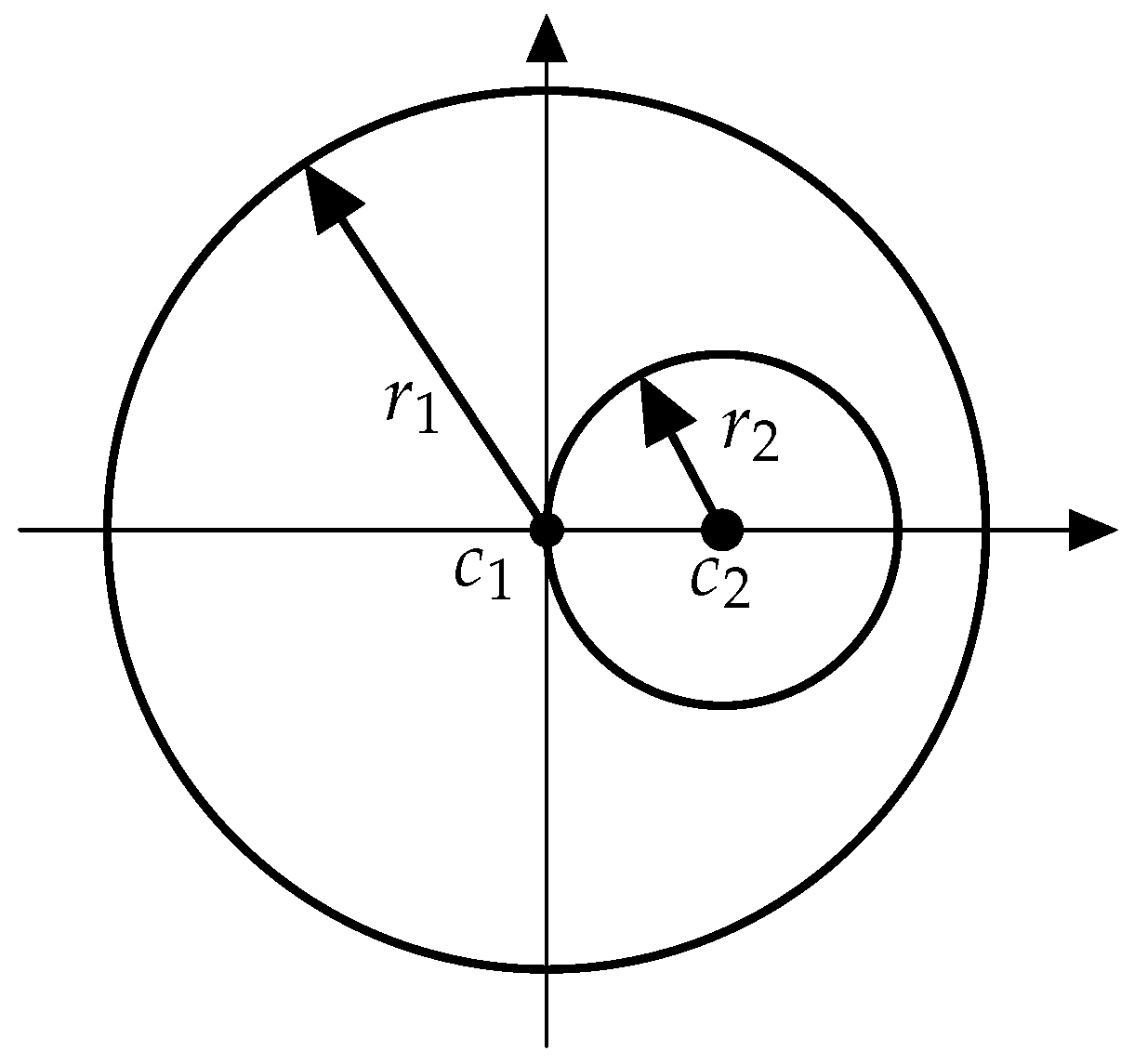
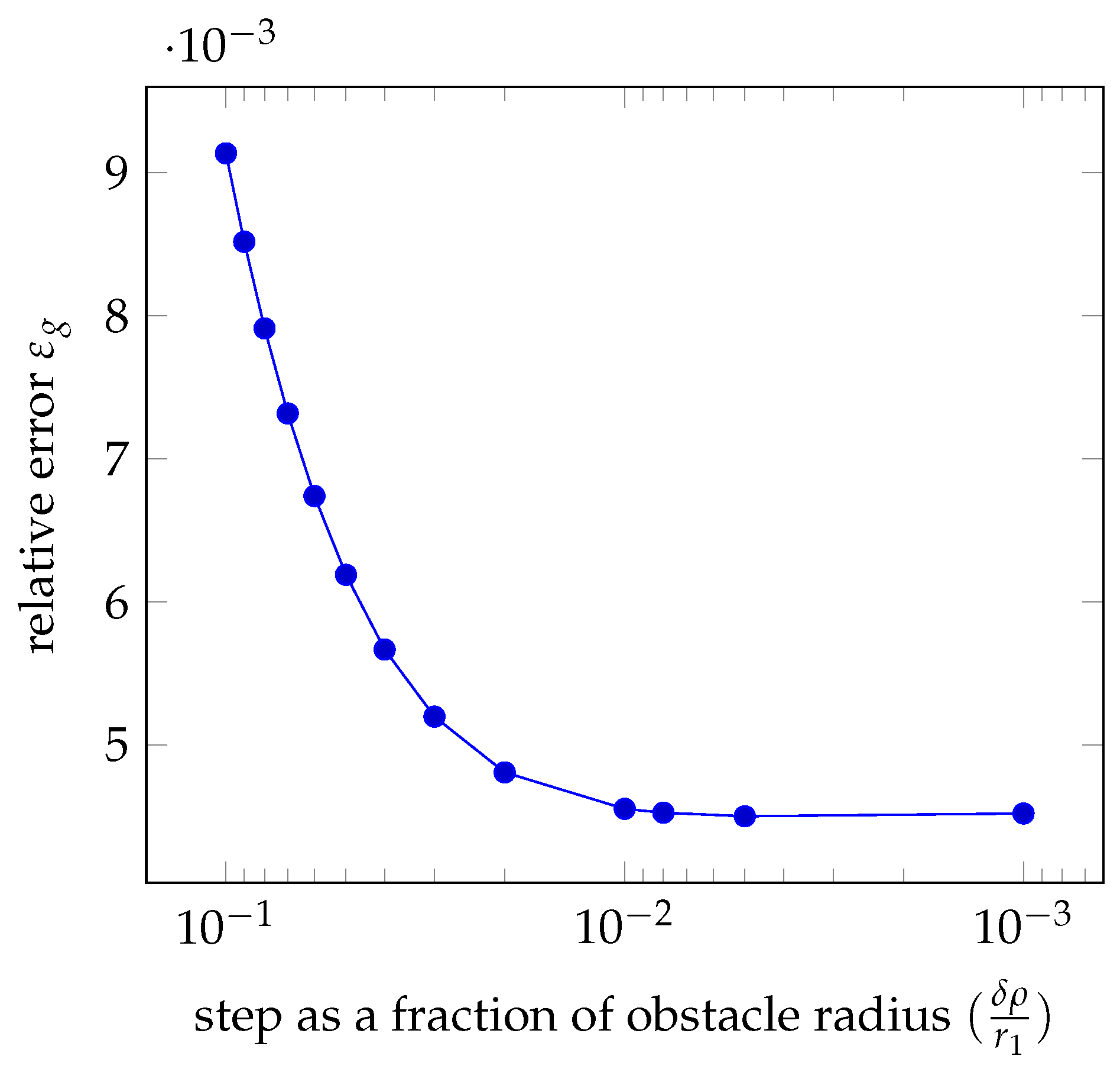
- and by varying the radius of the obstacle disc.
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Kim, D.H.; Wang, H.; Shin, S. Decentralized control of autonomous swarm systems using artificial potential functions: Analytical design guidelines. J. Intell. Robot. Syst. 2006, 45, 369–394. [Google Scholar] [CrossRef]
- Zeghal, K. Vers une Théorie de la Coordination D’actions. Application à la Navigation Aérienne. Ph.D. Thesis, Université Pierre et Marie Curie, Paris, France, 1994. [Google Scholar]
- Ge, S.S.; Cui, Y.J. Dynamic motion planning for mobile robots using potential field method. Auton. Robots 2002, 13, 207–222. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Kyriakopoulos, K.J.; Theodorakatos, D. Totally distributed motion control of sphere world multi-agent systems using decentralized navigation functions. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 2430–2435. [Google Scholar]
- Rimon, E.; Koditschek, D.E. Exact robot navigation using artificial potential functions. IEEE Trans. Robot. Autom. 1992, 8, 501–518. [Google Scholar] [CrossRef] [Green Version]
- Guys, L. Planification de Trajectoires d’Avions sans Conflit: Fonctions Biharmoniques et Fonction de Navigation Harmonique. Ph.D. Thesis, Université Toulouse 3 Paul Sabatier, Toulouse, France, 2014. [Google Scholar]
- Pêtrès, C.; Romero-Ramirez, M.-A.; Plumet, F. Reactive path planning for autonomous sailboat. In Proceedings of the 2011 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 112–117. [Google Scholar]
- Romano, M.; Virgili-Llop, J.; Zappulla, R., II. Near-optimal real-time spacecraft guidance and control using harmonic potential functions and a modified rrt. In Proceedings of the 27th AAS/AIAA Spaceflight Mechanics Meeting, San Antonio, TX, USA, 6–9 February 2017. [Google Scholar]
- Hacohen, S.; Shoval, S.; Shvalb, N. Applying probability navigation function in dynamic uncertain environments. Robot. Auton. Syst. 2017, 87, 237–246. [Google Scholar] [CrossRef]
- Hadamard, J.; Fréchet, M. Leçons Sur le Calcul des Variations; A. Hermann et fils: Paris, France, 1910; Volume 1. [Google Scholar]
- Jordan, K.E.; Richter, G.R.; Sheng, P. An efficient numerical evaluation of the green’s function for the helmholtz operator on periodic structures. J. Comput. Phys. 1986, 63, 222–235. [Google Scholar] [CrossRef]
- Beck, J.V.; Cole, K.D.; Haji-Sheikh, A.; Litkouhi, B. Heat Conduction Using Green’s Functions; Hemisphere Publishing Corporation: London, UK, 1992. [Google Scholar]
- Bertoluzza, S.; Decoene, A.; Lacouture, L.; Martin, S. Local error estimates of the finite element method for an elliptic problem with a dirac source term. arXiv, 2015; arXiv:1505.03032. [Google Scholar] [CrossRef]
- Sadybekov, M.A.; Torebek, B.T.; Turmetov, B.K. Representation of the green’s function of the exterior neumann problem for the laplace operator. Sib. Math. J. 2017, 58, 153–158. [Google Scholar] [CrossRef]
- Crowdy, D.; Marshall, J. Green’s functions for laplace’s equation in multiply connected domains. IMA J. Appl. Math. 2007, 72, 78–301. [Google Scholar] [CrossRef]
- Crowdy, D.G.; Kropf, E.H.; Green, C.C.; Nasser, M.M.S. The schottky–klein prime function: A theoretical and computational tool for applications. IMA J. Appl. Math. 2016, 81, 589–628. [Google Scholar] [CrossRef]
- Koditschek, D.E.; Rimon, E. Robot navigation functions on manifolds with boundary. Adv. Appl. Math. 1990, 11, 412–442. [Google Scholar] [CrossRef]
- Roussos, G.P.; Dimarogonas, D.V.; Kyriakopoulos, K.J. 3d navigation and collision avoidance for a non-holonomic vehicle. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3512–3517. [Google Scholar]
- Delgado, L.; Prats, X. Fuel consumption assessment for speed variation concepts during the cruise phase. In Proceedings of the Conference on Air Traffic Management (ATM) Economics, Belgrade, Serbia, 10 September 2009. [Google Scholar]
- Rimon, E.; Koditschek, D.E. Exact robot navigation using cost functions: The case of distinct spherical boundaries in e/sup n. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 1791–1796. [Google Scholar]
- Maeda, F.-Y.; Suzuki, N. The integrability of superharmonic functions on lipschitz domains. Bull. Lond. Math. Soc. 1989, 21, 270–278. [Google Scholar] [CrossRef]
- Nevanlinna, R.; Behnke, H.; Grauert, H. Analytic Functions; Springer: Berlin/Heidelberg, Germany, 1970; Volume 3. [Google Scholar]
- Henrici, P. Applied and Computational Complex Analysis; John Wiley & Sons: Hoboken, NJ, USA, 1993; Volume 3. [Google Scholar]
- Krantz, S.G. Handbook of Complex Variables; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Trefethen, L.N. Ten digit algorithms. Presented at the A. R. Mitchell Lecture at the 2005 Dundee Biennial Conference on Numerical Analysis, Dundee, UK, 28 June–1 July 2005. [Google Scholar]
- Lagrange, J.L. Mécanique Analytique; Mallet-Bachelier: Paris, France, 1853; Volume 1. [Google Scholar]
- Peetre, J. On Hadamard’s variational formula. J. Differ. Equ. 1980, 36, 335–346. [Google Scholar] [CrossRef]
- Suzuki, T.; Tsuchiya, T. First and second hadamard variational formulae of the green function for general domain perturbations. J. Math. Soc. Japan 2016, 68, 1389–1419. [Google Scholar] [CrossRef]
- Santos, I.; Puechmorel, S. Stochastic Navigation Function Implementation by a Semi-Analytical Algorithm. Available online: https://hal.inria.fr/hal-01869860 (accessed on 9 September 2018).
- Jones, E.; Oliphant, T.; Peterson, P. SciPy: Open Source Scientific Tools for Python. 2001. Available online: https://www.scipy.org/ (accessed on 9 September 2018).
- Needham, T. Visual Complex Analysis; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Fletcher, R. Practical Methods of Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Stargate Consortium. The Stargate Project. Available online: https://stargate.recherche.enac.fr/ (accessed on 9 September 2018).
- Guys, L.; Puechmorel, S.; Lapasset, L.; Amodei, L.; Maréchal, P. Génération automatique de trajectoires aériennes sans conflit à l’aide de fonctions biharmoniques. In Proceedings of the ROADEF 2012, 13ème Congrès Annuel de la Société Française de Recherche Opérationnelle et d’Aide à la Décision, Angers, France, 11–13 April 2012. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santos, I.; Puechmorel, S.; Dufour, G. First Order Hadamard Variation of the Harmonic Navigation Function on a Sphere World. Math. Comput. Appl. 2018, 23, 48. https://doi.org/10.3390/mca23030048
Santos I, Puechmorel S, Dufour G. First Order Hadamard Variation of the Harmonic Navigation Function on a Sphere World. Mathematical and Computational Applications. 2018; 23(3):48. https://doi.org/10.3390/mca23030048
Chicago/Turabian StyleSantos, Isabelle, Stéphane Puechmorel, and Guillaume Dufour. 2018. "First Order Hadamard Variation of the Harmonic Navigation Function on a Sphere World" Mathematical and Computational Applications 23, no. 3: 48. https://doi.org/10.3390/mca23030048
APA StyleSantos, I., Puechmorel, S., & Dufour, G. (2018). First Order Hadamard Variation of the Harmonic Navigation Function on a Sphere World. Mathematical and Computational Applications, 23(3), 48. https://doi.org/10.3390/mca23030048