1. Introduction
Psoriasis is an immune-mediated inflammatory skin disease that affects 2–3% of the population around the world [
1]. The most characteristic features of the pathology are hyperproliferation and disrupted epidermal differentiation, altered immunological and vascular skin profiles. Manifestations of psoriasis can vary according to severity: from weak, when only a few characteristic psoriatic plaques are present on the body of patients, to extremely severe ones, when the lesion affects almost the entire surface of the body and joints. Disease can significantly reduce the standard of living and performance of patients [
2]. There are established links between psoriasis and other diseases: obesity, diabetes, cardiovascular diseases, metabolic syndrome, and depression [
3]. Molecular-genetic causes of the disease are still not fully established. At the same time, various polymorphisms associated with psoriasis as well as several environmental factors that can lead to the manifestation of this disease are identified [
4]. To date, about 150 million people around the world are suffering from psoriasis. In the USA the annual cost of treatment is about
billion, while the existing therapies can only relieve symptoms and increase remission time. In addition, recent studies have revealed the division of psoriasis into subtypes, depending on which patients may respond differently to therapy. In some cases, despite costly and prolonged treatment, the patient’s condition may not improve [
5]. In recent years, studies have greatly expanded the understanding of the pathogenesis of psoriasis and allowed the development of numerous therapies.
In psoriasis, mathematical models are effectively used to predict cellular behavior of the skin in both normal and pathological conditions. Among all possible models [
6], we highlight the models that are described by systems of differential equations [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15]. In turn, controlled mathematical models are used to simulate the use of medication and dosage regimen, compare the effects of various drugs on the affected areas of the skin, and to determine the most effective methods of treatment. Within the framework of a specific model, optimal control theory is used to find the best strategies in one sense or another for psoriasis treatment.
For mathematical models of psoriasis treatment, optimal control problems were considered in [
15,
16,
17], where the optimal treatment strategies minimizing the weighted sum of the total concentration of keratinocytes and the total cost of the treatment were found numerically. This cost of psoriasis treatment was expressed by an integral of the square of control, and these models were described using systems of differential equations linear in control. After applying the Pontryagin maximum principle as a necessary optimality condition, the corresponding optimal control problems were reduced to two-point boundary value problems for the maximum principle, which were then solved numerically, applying standard mathematical software. This was because the right-hand sides of the systems of differential equations of such boundary value problems were Lipschitz functions of the phase and adjoint variables.
In the optimal control problems for mathematical models of diseases and the spread of epidemics, the total cost of treatment can also be expressed by an integral of control [
18,
19,
20,
21]. In this case, the models are still described by systems of differential equations that are linear in control. Then, as shown in [
21,
22], after applying the Pontryagin maximum principle to such problems, the corresponding optimal controls can contain singular arcs on which these controls are not uniquely determined from the maximum condition. After the existence of such singular arcs are established on appropriate singular intervals, the corresponding optimality conditions are checked, and the concatenations of singular and nonsingular intervals are found, the finding of specific optimal solutions in optimal control problems is still performed only numerically. This paper shows that optimal controls can contain singular arcs in the minimization problem for the mathematical model of psoriasis treatment even in the absence of the controls in the integral terms of the functional to be minimized responsible for the cost of this treatment.
This paper is organized as follows.
Section 2 is devoted to the description of the mathematical model of psoriasis treatment and the formulation of the corresponding optimal control problem for it. Namely, we consider a nonlinear controlled system of three differential equations that presents the process of treating this disease. Its phase variables determine the concentrations of T-lymphocytes, keratinocytes, and dendritic cells. The interaction of these types of cells leads to the appearance and development of psoriasis. There are two scalar bounded controls in the system that reflect all types of psoriasis treatment: skin creams that prevent or inhibit the formation, development and spread of psoriatic skin lesions, as well as pills and injections, also aimed at achieving similar results. At the same time, skin creams suppress the interaction between T-lymphocytes and keratinocytes; pills and injections weaken the interaction between T-lymphocytes and dendritic cells. All such medications are aimed at achieving the main goal, which is to reduce the number of keratinocytes. Therefore, for such a controlled system, at a given time interval the problem of minimizing the concentration of keratinocytes at the end of the time interval is stated. An optimal solution for such a problem, consisting of the optimal controls and the corresponding optimal solutions of the system, is analyzed using the Pontryagin maximum principle. Its application to the considered minimization problem is discussed in
Section 3. Here, also possible types of the optimal controls are discussed: whether they are only bang-bang functions, or they can contain singular arcs in addition to the bang-bang intervals. A detailed analysis of the behavior of the optimal controls is given in
Section 4. Here, we study the properties of the corresponding switching functions, which are crucial in such analysis. Using the Lie brackets of the geometric control theory allows us to obtain the Cauchy problem for the switching functions. Such a Cauchy problem makes it possible to draw the conclusions about possible singular arcs of the optimal controls. The first one shows that these controls do not simultaneously have singular arcs on the same singular intervals. The second of them is that when one optimal control has a singular arc on some singular interval, the second optimal control is constant on this interval and takes one of its boundary values. The next two sections,
Section 5 and
Section 6, are devoted to a detailed analysis of singular arcs of each optimal control. In these sections it is shown that one of them can have a singular arc of the order of two, and the other can contain a singular arc of order one. Also, for each of these singular arcs the corresponding necessary optimality conditions are checked (Kelly-Cope-Moyer condition and Kelly condition). Finally, the forms of concatenations of the singular arcs of the optimal controls with nonsingular intervals on which such controls are bang-bang functions are considered. Since, as previously mentioned, after discussing all such issues, finding the specific optimal solutions is carried out numerically, then in
Section 7 the results of the corresponding numerical calculations and their discussion are presented.
Section 8 contains our conclusions.
2. Mathematical Model and Optimal Control Problem
Let a time interval
be given, which is the period of psoriasis treatment. We consider on this interval a mathematical model that establishes the links between the concentrations
,
,
of T-lymphocytes, keratinocytes, and dendritic cells, respectively, because interactions between these types of cells cause a disease such as psoriasis. Such a model is the nonlinear system of differential equations:
with given initial values:
In System (
1) we suppose that
is the constant rate of accumulation for T-lymphocytes and
is the constant accumulation rate of dendritic cells. The rate of activation of T-lymphocytes by dendritic cells is
and
is the activation rate of dendritic cells by T-lymphocytes. Also, we consider that the removal rates of T-lymphocytes, keratinocytes and dendritic cells are denoted by
,
and
, respectively. Finally, we suppose that
is the rate of activation of keratinocytes by T-lymphocytes and growth of keratinocytes due to T-lymphocytes occurs at the rate
.
Next, in System (
1) two control functions
and
are introduced. The control
is at the places of interaction between T-lymphocytes and keratinocytes and reflects the medication dosage to restrict the excessive growth of keratinocytes. In a similar way, the control
is at the places of interaction between T-lymphocytes and dendritic cells and reflects the medication dosage for the restriction of the excessive growth of keratinocytes as well. The controls
and
subject to the following restrictions:
We consider that the set of all admissible controls
is formed by all possible pairs of Lebesgue measurable functions
, which for almost all
satisfy Inequality (
3).
Let us introduce a region:
where
M is a positive constant that depends on the parameters
,
,
,
,
,
,
,
,
of System (
1) and its initial values
,
,
from (
2). Here
is the Euclidean space consisting of all column vectors and the sign
means transposition.
Then, the boundedness, positiveness, and continuation of the solutions for System (
1) is stated by the following lemma.
Lemma 1. Let the inclusion be valid. Then, for any pair of admissible controls the corresponding absolutely continuous solutions , , for System (
1)
are defined on the entire interval and satisfy the inclusion: Remark 1. Relationship (
4)
implies that the region Λ
is a positive invariant set for System (
1)
. The proof of Lemma 1 is fairly straightforward, and we omit it. Proofs of such statements are given, for example, in [16,23,24]. Now, let us consider for System (
1) on the set of admissible controls
the following minimization problem:
which consists in minimizing the concentration of keratinocites at the final moment
T of psoriasis treatment. As already noted in [
25], the optimal control problem (
5) differs from problems that are typically considered in the literature on the control of psoriasis models [
15,
16,
17,
26] in that the functional from (
5) does not include an integral of the weighted sum of the squares of the controls
and
, which is responsible for the total cost of drug dosages. In psoriasis treatment, in most cases, either a skin cream, or an oral medication are used. Both prescribed medications have regular daily dosage and are not as harmful for patients as the drugs used in chemotherapy for cancer treatment [
21]. Therefore, the total cost of psoriasis treatment in the meaning “harm” to a patient and that usually mathematically is described by an integral of the weighted sum of the squares of the controls, can be ignored. Moreover, using the terminal functional from (
5) instead of corresponding integral functional [
15,
16,
17,
26] simplifies the subsequent analytical arguments.
The existence in the minimization problem (
5) of the optimal controls
and the corresponding optimal solutions
,
,
for System (
1) follows from Lemma 1 and Theorem 4 ([
27], Chapter 4).
Finally, based on the results from [
17,
23,
26], we assume that the following assumption is true.
Assumption 1. Let the inequalities:be valid. Let us introduce the constants:
By this assumption, it is easy to see that these constants are positive.
3. Pontryagin Maximum Principle
We apply the Pontryagin maximum principle [
28] to analyze the optimal controls
,
and the corresponding optimal solutions
,
,
. Firstly, let us define the Hamiltonian:
where
,
,
are the adjoint variables.
Secondly, we calculate the required partial derivatives:
Then, in accordance with the Pontryagin maximum principle, for the optimal controls , and the optimal solutions , , there exists a vector-function such that:
is a nontrivial solution of the adjoint system:
the controls
and
maximize the Hamiltonian
with respect to variables
and
for almost all
, and therefore they satisfy the relationships:
where the functions:
are the switching functions describing the behavior of the controls
and
in accordance with Formulas (
8) and (
9), respectively.
Analysis of Formulas (
8) and (
9) shows possible types of the optimal controls
and
. They can only have a bang-bang type and switch between the corresponding values
and 1,
and 1. This occurs, when passing through the points at which the switching functions
and
are zero, the sign of these functions changes. Or, in addition to intervals of a bang-bang type, the controls
and
can also contain singular arcs [
22,
29]. This occurs when the switching functions
and
individually or both simultaneously vanish identically on certain subintervals of the interval
. Furthermore, such subintervals we will call as singular intervals. The following sections are devoted to a detailed study of singular arcs for the optimal controls
and
.
Now, we establish the important property of the controls
and
. Namely, by Lemma 1, the initial values of System (
7), Formula (
10), and the continuity of the switching functions
and
, the following lemma is valid.
Lemma 2. There exist such values that the inequalities and hold for all t from the corresponding intervals and .
Corollary 1. Lemma 2 and Formulas (
8)
and (
9)
imply the following relationships for the optimal controls and : 4. Differential Equations of the Switching Functions
Let us obtain differential equations for the switching functions
and
. To do this, we draw on the concepts and notations of geometric control theory from [
21,
22].
Again, we consider the Euclidean space
in which the value
is the scalar product of its elements. Let
. Then, we rewrite System (
1) as follows
where
with
the drift and
,
the control vector fields of this system. Here
is the column vector consisting of the solutions
,
,
that correspond to the admissible controls
and
, that is
. Let
,
and
be the Jacobian matrices of the vector functions
,
and
, respectively. By Formula (
12), we find the following relationships:
Then, using the introduced concepts and notations, it is easy to see that
is the optimal trajectory for System (
11) corresponding to the optimal controls
and
;
is the appropriate nontrivial solution for the adjoint System (
7), or in the new notations:
The Hamiltonian
takes the form:
The switching functions
and
, defined by Formula (
10), become the scalar products of the adjoint function
with the corresponding control fields
and
:
Now, according to [
21,
22], we introduce for the drift and control vector fields
,
and
the corresponding Lie brackets:
Using (
11) and (
14)–(
18), the derivatives of the switching functions
and
can be obtained as follows
Now, using (
12) and (
13) in (
16)–(
18), we compute the Lie brackets
,
and
. As a result, we find the formulas:
Let us write these Lie brackets in a more convenient form for the subsequent analysis. For this, we introduce the following linearly independent vectors:
It is easy to see that the following representations for the control vector fields
and
are valid:
Using these relationships, Formula (
15) for the switching functions
and
can be rewritten as
Now, let us find the decompositions of the Lie brackets
,
and
, defined by (
21), by the vectors
p,
q,
r. As a result, we have the representations:
Next, let us introduce the auxiliary function
, and define the following absolutely continuous functions:
It is easy to see that the functions and are positive on the interval .
Finally, substituting (
23)–(
25) into (
19), (
20) and using (
22), (
26), we find the required differential equations for the switching functions
and
:
We add to these equations the first equation of System (
7), written with use of the functions
,
,
:
as well as the corresponding initial values:
As a result, we obtain the Cauchy problem for the switching functions
,
and the function
:
which we will use to justify the properties of the functions
and
.
Now, let us establish the properties of the switching functions and . Firstly, the following lemma is true.
Lemma 3. There is no subinterval of the interval at which both switching functions and are identically zero.
Proof of Lemma 3. We suppose the contrary. Let there be the interval
on which the functions
and
identically equal to zero. Then, their derivatives
and
almost everywhere on this subinterval also vanish. From the first two differential equations of the Cauchy problem (
27) we find that
everywhere on the subinterval
. Hence, on this subinterval the derivative
is almost everywhere zero. Therefore, the third differential equation of the Cauchy problem (
27) is also satisfied. Using the definition of the function
, Lemma 1 and Formula (
10), we find that the adjoint function
vanishes identically on the subinterval
. Since the system of linear differential equations (
7) is homogeneous, then
identically everywhere on the interval
, which is contradictory. Hence, our assumption was wrong, and the subinterval
on which both switching functions
and
are identically zero, does not exist. This completes the proof. ☐
Secondly, the following lemma holds.
Lemma 4. Let the subinterval be a singular interval of the optimal control . Then, everywhere on this subinterval, the optimal control is constant and takes one of the values .
Proof of Lemma 4. On the subinterval
the switching function
is identically zero, and its derivative
vanishes almost everywhere on this interval. Then, the first differential equation of the Cauchy problem (
27) yields the equality:
Let us suppose that the switching function
is zero at some point
, that is
Then, (
28) implies the equality:
The identical equality to zero of the function
on the subinterval
and (
29), (
30) lead us to the equality
. A further repetition of the corresponding arguments from Lemma 3 gives a contradiction. Hence, our assumption was wrong, and the switching function
does not vanish at any point of the subinterval
. Therefore, it is sign-definite on this subinterval, and, by Formula (
9), the optimal control
corresponding to it, is constant and takes one of the values
. This completes the proof. ☐
Furthermore, performing arguments similar to the arguments of Lemma 4, one can show that the following lemma is valid.
Lemma 5. Let the subinterval be a singular interval of the optimal control . Then, everywhere on this subinterval, the optimal control is constant and takes one of the values .
Now, we strengthen the result obtained in Lemma 4. Namely, the following lemma holds.
Lemma 6. Let the subinterval , where , be a singular interval of the optimal control . Then, there exists a number such that on the interval the optimal control is constant and takes one of the values .
Proof of Lemma 6. It suffices to show that the ends of the subinterval
cannot be zeros of the switching function
, which is an absolutely continuous function. Indeed, if such a fact holds, that is the inequalities:
are true, then Lemma 6 immediately follows from the Theorem on the stability of the sign of a continuous function [
30]. Therefore, for definiteness, we consider the right end
of the subinterval
. Let us suppose the contrary. This means that the equality:
is valid. Then, for the function
the following two cases are possible.
Case 1. Let
. The definition of the function
, Lemma 1 and the second formula of (
10) imply the relationship:
If
, then (
32) yields
. This fact leads to contradictory equality
, as the proofs of Lemmas 3 and 4 show. If
, then again the definition of the function
, Lemma 1 and the first formula of (
10) imply
. The absolutely continuity of the function
and the Theorem on the stability of the sign of a continuous function [
30] lead to the existence of a left neighborhood of the point
at which the switching function
is sign-definite. This contradicts the fact that such a left neighborhood of the point
belongs to the subinterval
, which is a singular portion of the optimal control
. Thus, Case 1 is impossible.
Case 2. Let
. For definiteness, we consider that the inequality:
is true. As it was already noted,
and
are the absolutely continuous functions. In Lemma 4 it was established that the control
is constant on the subinterval
, that is
. Therefore, by (
31), (
33) and the Theorem on the stability of the sign of a continuous function [
30], there exists the interval
on which the inequality:
is valid. Let
be the midpoint of this interval. We rewrite the first differential equation from the Cauchy problem (
27) as
Then, we integrate this equation on the interval
with the initial value
. As a result, the following formula can be found:
By (
34) and (
35), we obtain the positivity of the function
for
and the negativity of this function for
on the interval
. This is again contradictory. Hence, Case 2 is also impossible.
Thus, our assumption was wrong, and the switching function does not vanish at the point . This completes the proof. ☐
Furthermore, carrying out arguments similar to the arguments of Lemma 6, we can show that the following lemma holds, which strengthens the result of Lemma 5.
Lemma 7. Let the subinterval , where , be a singular interval of the optimal control . Then, there exists a number such that on the interval the optimal control is constant and takes one of the values .
Remark 2. From Lemmas 4–7 we conclude that when a singular arc occurs for one of the optimal controls, or , System (
1)
becomes on the corresponding singular interval a system with one control, because the other control is constant. Next, in
Section 5 and
Section 6, we separately study the existence of singular arcs of the optimal controls
and
, applying the approach from [
21]. It consists in the sequential differentiation on a singular interval of the corresponding switching function. We carry out this differentiation if the derivative of even order does not have a nonzero term containing control. If such a term appears in a second order derivative, then we say that a singular arc is of the order of one. If it occurs in a derivative of the fourth order, then it is considered that the singular arc is of the order of two. Then, the corresponding optimality condition of a singular arc is checked. If it is satisfied, we find the formulas of the optimal control and the corresponding optimal solutions of System (
1) on a singular interval corresponding to such a singular arc. Also, the type of concatenation of this singular arc with non-singular intervals is studied, where the considered optimal control is bang-bang. Finally, we demonstrate a singular arc of the optimal control through the results of a numerical solution of the minimization problem (
5), presented in
Section 7.
5. Investigation of a Singular Arc of the Optimal Control
Let us study the existence of a singular arc of the optimal control
. According to [
22,
29], this means the existence of a subinterval
on which the corresponding switching function
identically vanishes. By Lemma 4, everywhere on this subinterval the optimal control
is a constant function taking one of the values
, that is,
Then, Formula (
19) of the first derivative
of the switching function
is rewritten in the form:
Let us transform the right-hand side of this formula. To do this, we rewrite (
23) and (
25) as
where
Then, using (
37), we can write the Lie bracket
as follows
where
Substituting (
38) into the right-hand side of (
36), we obtain the relationship:
Now, differentiating (
36), we find the formula for the second derivative
of the switching function
:
Let us transform the terms of this formula. First, we consider the second term and its factor
By analogy with (
16)–(
18), we have equality:
where
is the Jacobi matrix of the vector function
. Using (
38), we find the relationship:
where
,
,
are the column gradients of the functions
,
,
, respectively. In addition, the representations:
are valid, where the vector functions
,
are defined as
We substitute (
43) and the first representation of (
44) into (
42). After the necessary transformations, the following relationship can be obtained:
Substituting this expression into (
41), we find the formula:
In (
39) the function
is positive on the interval
. Therefore, let us express the scalar product
through the remaining terms as follows
and then, we substitute this expression into (
45). After the necessary transformations, the following relationship finally can be obtained:
On the subinterval
the switching function
vanishes identically, that is
and therefore its first derivative
is also zero everywhere on this subinterval:
Then, Formula (
47) is simplified and takes the following form:
Let us calculate the right-hand side of this formula. For this, we consider the expression
. Calculating the column gradients
,
of the corresponding functions
,
, the following equality can be found:
Multiplying this expression scalarly by the vector function
from (
12), we conclude that the scalar product
is zero. Consequently, (
50) has the form:
Now, let us consider the first term on the right-hand side of (
40):
By analogy with (
42), we have the equality:
Let us find the Jacobi matrix
. The Jacobi matrix
of the vector function
is given by the second formula of (
44). The use of direct calculations allows us to find the representation of the Jacobi matrix
from (
13) in the following form:
Then, we obtain the required representation of the Jacobi matrix
as
where
We substitute (
43) and (
56) into (
54). After the necessary transformations, the following formula can be found:
Substituting this formula into (
53), we obtain the expression:
Finally, let us substitute (
46) into (
57). After the necessary transformations, we find the relationship:
On the subinterval
Equalities (
48) and (
49) are valid. Then, Formula (
58) is simplified and takes the following form:
Let us calculate the right-hand side of this formula. The expression
is given by (
51). Multiplying this expression scalarly by the vector function
, defined by the vector functions
and
from (
12), we obtain the following formula for the first term in braces:
For the second term in braces, we first find the relationship:
and then, by (
38), obtain the representation:
Multiplying the last two expressions scalarly and taking into account (
60), we have the following expression for the relationship in braces of (
59):
Let us define the quadratic function:
We use this function, when substitute (
61) together with the formula of the function
into (
59). After the necessary transformations, this formula is written as follows
Finally, let us substitute (
52) and (
62) into (
40). As a result, we have the formula of the second derivative
of the switching function
:
On the subinterval
not only the switching function
itself and its first derivative
vanish, but also the second derivative
. By Lemma 1, the linear independence of the vectors
p,
q,
r and the non-triviality of the adjoint function
, the relationship:
implies equality:
By Assumption 1, the discriminant of the quadratic function
is positive, and
, and therefore, it has a unique positive root
, defined by the formula:
This root is the value of the solution
on the subinterval
. We note the important properties of the value
:
Analyzing (
63), we see that on the subinterval
the second derivative
of the switching function
does not contain the control
. It means that the order of the singular arc is greater than one [
22,
29]. Therefore, we continue to differentiate the switching function
on this subinterval, and using (
63) find its third derivative
:
On the subinterval
Equality (
64) is valid, and therefore the second term in braces of (
66) is zero. Substituting the formula for
from System (
1) into the first term of (
66), we find the required formula:
On the subinterval
the third derivative
is also zero that leads to the equality:
It allows us to find a value
that is the value of the solution
on this subinterval:
We note that due to the inclusion of (
65), the value
is positive.
Finally, on the subinterval
let us calculate the fourth derivative
of the switching function
using (
66). Some of the terms that are obtained with such a differentiation vanish by virtue of (
64) and (
68). As a result, the following relationship can be obtained:
which implies the expression:
Here we applied the second formula of (
22). It is easy to see that this expression is sign-definite everywhere on the subinterval
. Therefore, firstly, the order of the singular arc equals two. Secondly, the necessary optimality condition of the singular arc, the Kelly-Cope-Moyer condition [
29], is either carried out in a strengthened form, and then the singular arc exists, or it is not satisfied, and then the singular arc does not exist. By [
29] and (
71), the strengthened Kelly-Cope-Moyer condition leads to the inequality:
By Assumption 1, Lemma 1, and the inequality of (
65), Relationship (
72) implies the inequality
, which in turn, by Formula (
9), implies
everywhere on the subinterval
.
Remark 3. On the subinterval , which is the singular interval of the optimal control , the optimal control is constant and takes the value 1. This leads to the corresponding correction of the formulations of Lemmas 4 and 6.
Next, Formula (
70) and the vanishing of the fourth derivative
of the switching function
yield the following relationship for the control
and function
:
which are the control
and solution
on the subinterval
. Formula (
69) allows us to rewrite (
73) as follows
Here
is the quadratic function given by the formula:
By the inclusion of (
65), we consider this function on the interval
. The relationships:
lead to the conclusion that the function
has exactly one zero
. In turn, this fact implies the validity of the formula:
We apply this formula in analysis of (
74). Positivity of the product on its left-hand side and the inclusion of (
65) imply the validity of the inclusion:
which is a necessary condition for the existence of the singular arc.
Finally, let us discuss the behavior of the optimal control
over the entire interval
. When the inclusion
holds for all
, the control
is admissible. Corollary 1 shows that the singular arc of the optimal control
is concatenated with the nonsingular interval, where this control is bang-bang. Let
be the time moment, where such a concatenation occurs. Then, as it follows from [
22,
29], when
for all
, the nonsingular interval contains at least the countable number of switchings of the control
, accumulating to the point
. This behavior of the optimal control
on nonsingular intervals is called a chattering [
22,
29], and will be observed on both sides of the subinterval
.
Thus, the above arguments of this section lead us to the validity of the following proposition.
Proposition 1. The optimal control on a singular interval can contain a singular arc of order two, which concatenates with bang-bang intervals of this control using chattering. On such an interval the optimal control is constant and takes the value 1.
6. Investigation of a Singular Arc of the Optimal Control
Now, let us carry out arguments similar to those presented in the previous section to study the existence of a singular arc for the optimal control
. According to [
22,
29], this means the existence of a subinterval
on which the corresponding switching function
identically vanishes. By Lemma 5, everywhere on this subinterval the optimal control
is a constant function that takes one of the values
, that is,
Then, Formula (
20) for the first derivative
of the switching function
is rewritten in the form:
Let us transform the right-hand side of this formula. To do this, we rewrite (
24) and (
25) as
where
Then, using (
76), we can write the Lie bracket
as follows
where
Substituting (
77) into the right-hand side of (
75), we obtain the relationship:
Now, differentiating (
75), we find the formula for the second derivative
of the switching function
:
Let us transform the terms of this formula. First, we consider the second term and its factor
By analogy with (
16)–(
18), we have equality:
where
is the Jacobi matrix of the vector function
. Using (
77), we find the relationship:
where
,
,
are the column gradients of the functions
,
,
, respectively. We substitute expression (
82) and the second representation of (
44) into (
81). After the necessary transformations, the following relationship can be obtained:
Substituting this expression into (
80), we find the formula:
In (
78), the function
is positive on the interval
. Therefore, let us express the scalar product
through the remaining terms as follows
and then, we substitute this expression into (
83). After the necessary transformations, the following relationship finally can be obtained:
On the subinterval
the switching function
vanishes identically, that is
and therefore its first derivative
is also zero everywhere on this subinterval:
Then, Formula (
85) is simplified and takes the following form:
Let us calculate the right-hand side of this formula. For this, we consider the expression
. Calculating the column gradients
,
of the corresponding functions
,
, the following equality can be found:
Multiplying this expression scalarly by the vector function
from (
12), we conclude that the following relationship holds:
Substituting this relationship together with the formula of the function
into (
88), we see that it has the form:
Now, let us consider the first term on the right-hand side of (
79):
By analogy with (
81), we have the equality:
Let us find the Jacobi matrix
. The Jacobi matrices
and
of the corresponding vector functions
and
from (
12) are given by the representation (
55) and the first formula of (
44). Then, the required representation can be written as
where
We substitute (
82) and (
93) into (
92). After the necessary transformations, the following formula can be found:
Substituting this formula into (
91), we obtain the expression:
Now, let us substitute (
84) into (
94). After the necessary transformations, we have the relationship:
On the subinterval
equalities (
86) and (
87) are valid. Then, formula (
95) is simplified and takes the following form:
Let us calculate the right-hand side of this formula. The expression
is given by (
89). Multiplying this expression scalarly by the vector function
, defined by the vector functions
and
from (
12), we obtain the following formula for the first term in braces:
Now, substituting (
77) into the second term in braces, we find the expression:
Using the formulas of the vectors
p,
q,
r,
, the vector function
and the functions
,
,
, we calculate all the terms of (
98). As a result, the following expression can be obtained:
We substitute (
97) and (
99) into (
96). After the necessary transformations in this formula and the substitution of the quadratic function
defined by the relationship:
as well as the formula of the function
, we have for (
96) the following expression:
Now, substituting (
90) and (
100) into (
79), we finally find the formula for the second derivative
of the switching function
as
This formula implies the relationship:
Here we applied the first formula of (
22). It is easy to see that this expression is sign-definite everywhere on the subinterval
. Therefore, firstly, the order of the singular arc equals one. Secondly, the necessary optimality condition of the singular arc, the Kelly condition [
29], is either carried out in a strengthened form, and then the singular arc exists, or it is not satisfied, and then the singular arc does not exist. By [
29] and (
102), the strengthened Kelly condition leads to the inequality:
By Lemma 1, Relationship (
103) implies the inequality
, which in turn, by Formula (
8), implies
everywhere on the subinterval
.
Remark 4. On the subinterval , which is the singular interval of the optimal control , the optimal control is constant and takes the value 1. This leads to the corresponding correction of the formulations of Lemmas 5 and 7.
Next, Formula (
101) and the vanishing of the second derivative
of the switching function
yield the following relationship for the control
:
which is the control
on the subinterval
. Here the functions
,
,
are the corresponding solutions
,
,
on this subinterval. When the inclusion
holds for all
, the control
is admissible. Corollary 1 shows that the singular arc of the optimal control
is concatenated with the nonsingular interval, where this control is bang-bang. Let
be the time moment, where such a concatenation occurs. Then, as it follows from [
22,
29], when
for all
, such concatenations are allowed and will be observed on both sides of the subinterval
.
Thus, the above arguments of this section lead us to the validity of the following proposition.
Proposition 2. The optimal control on a singular interval can contain a singular arc of order one, which concatenates with bang-bang intervals of this control. On such an interval the optimal control is constant and takes the value 1.
7. Numerical Results
Here we demonstrate the results of a numerical solution of the minimization problem (
5). For numerical calculations the following values of the parameters of System (
1), the initial values (
2) and the control constraints (
3) taken from [
17,
26] were used:
These numerical calculations were conducted using “BOCOP–2.0.5” [
31]. It is an optimal control interface, implemented in MATLAB, for solving optimal control problems with general path and boundary constraints, and free or fixed final time. By a time discretization, such problems are approximated by finite-dimensional optimization problems, which are then solved by well-known software IPOPT, using sparse exact derivatives computed by ADOL-C. IPOPT is an open-source software package for large-scale nonlinear optimization.
Considering the time interval of 100 days (
), a time grid with 8000 nodes was created, i.e., for
we get
. Since our problem is solved by a direct method and, consequently, using an iterative approach, we impose at each step the acceptable convergence tolerance of
. Moreover, we use the sixth-order Lobatto III C discretization rule. In this respect, for more details we refer to [
31].
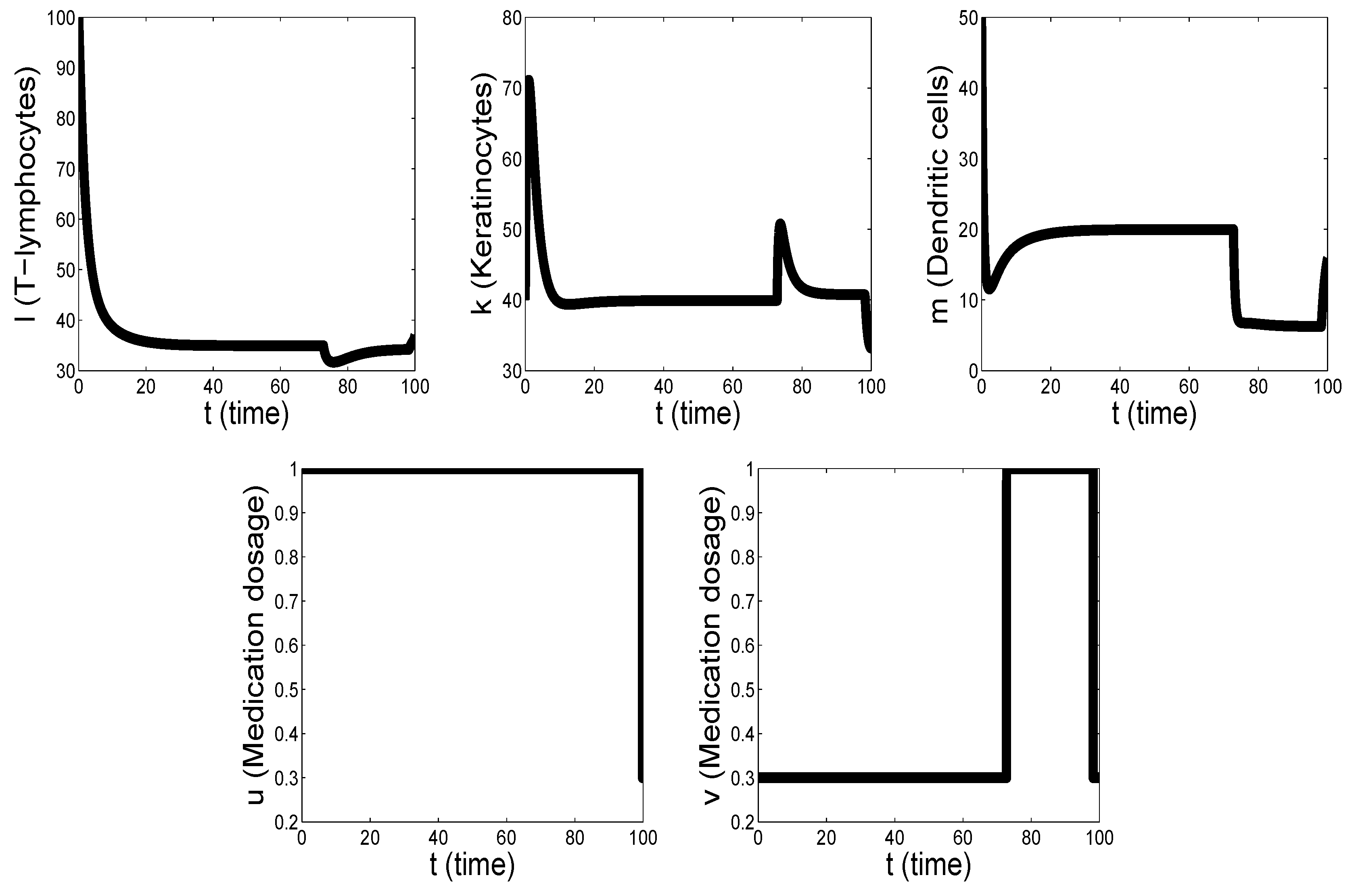
The corresponding results of the numerical calculations are presented in
Figure 1 and
Figure 2. In each figure for a specific value of
we give the graphs of the optimal controls
,
, the corresponding optimal solutions
,
, and
;
is the minimum value of the functional
of (
5).
It is important to note that the controls
and
are auxiliary. They are introduced into System (
1) to simplify analytical analysis. The corresponding actual controls
and
in the same system are related to the controls
and
by the formulas:
Therefore, where the auxiliary optimal control has a maximum value of 1, the appropriate actual optimal control takes a minimum value of 0, and vice versa. Similar remark is also valid for the auxiliary optimal control and the appropriate actual optimal control . Moreover, the controls and are the optimal strategies of psoriasis treatment.
The conducted numerical calculations show the performance of software “BOCOP–2.0.5” in the study of such a complex (from computational point of view) phenomenon as chattering of the optimal control
. We note that the corresponding actual optimal control
also has such behavior. This type of psoriasis treatment does not make sense. However, there is no reason for concern because there are approaches for chattering approximation presented, for example, in [
21,
32,
33,
34].
Taking into account Formula (
105) related to the actual optimal controls
and
and the optimal controls
and
corresponding to them, and after analyzing the graphs of these controls (see
Figure 1 and
Figure 2), we conclude that the medication intake schedule during 100 days of psoriasis treatment is as follows.
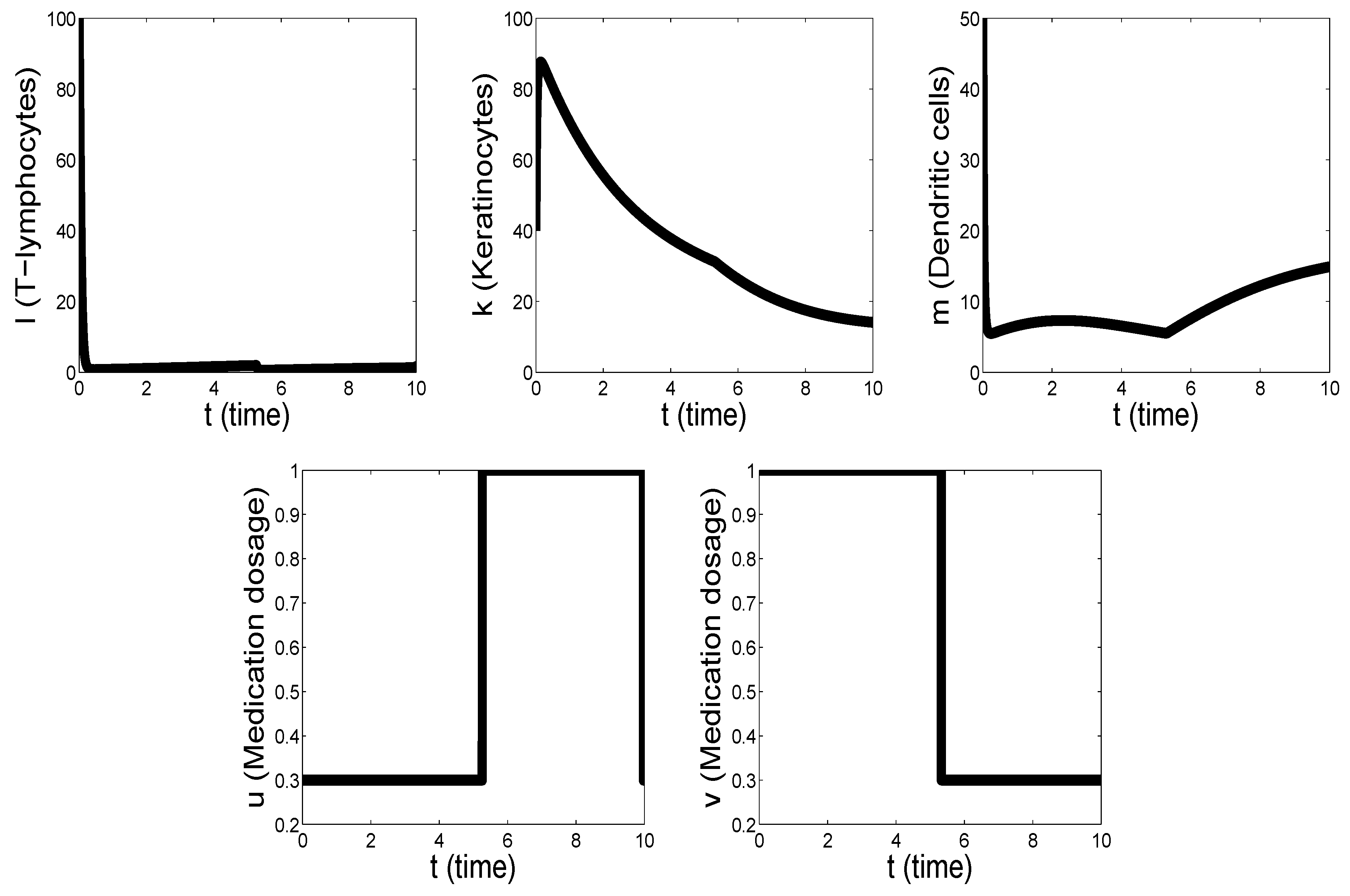
At small values of (for example, ), for most of the entire treatment period (95 days), a drug, which suppresses the interaction between T-lymphocytes and keratinocytes must be taken at the maximum dosage. In this case, a drug suppressing the interaction between T-lymphocytes and dendritic cells, must be taken at the minimum dosage. Then, on the 96th day, the medication schedule changes to the opposite one and for the next three days it looks like this: a medication suppressing the interaction between T-lymphocytes and keratinocytes is taken at the minimum dosage and a drug that suppresses the interaction between T-lymphocytes and dendritic cells is, on the contrary, taken at the maximum dosage. Finally, on the 99th day, the schedule of taking a drug, which suppresses the interaction between T-lymphocytes and keratinocytes, is again reversed. It is taken at the maximum dosage until the end of the treatment period. The schedule of taking a drug, which suppresses the interaction between T-lymphocytes and dendritic cells, does not change. It is still taken at the maximum dosage.
With the increase of the value of (for example, ), the actual optimal control responsible for taking a drug that suppresses the interaction between T-lymphocytes and keratinocytes during most of the entire treatment period (95 days) has an interval corresponding to a smooth increase in the dosage of the used medication (singular arc). At the beginning and at the end of such an interval of psoriasis treatment there are the periods with increasing number of switchings from the lower intensity to the greatest intensity and vice versa (chattering). In addition, the whole process of this treatment ends with the interval of the greatest intensity (maximum dosage of the medication intake). Moreover, the schedule of taking a drug that suppresses the interaction between T-lymphocytes and dendritic cells does not qualitatively change. Almost during the entire period of psoriasis treatment (98 days), it is taken at the minimum dosage. Then, on the 99th day of the treatment period, the schedule for taking such a drug changes to the opposite. During the remaining two days it is taken at the maximum dosage.
Next, it was found that with the decrease or increase of the length of psoriasis treatment (for example, 10 days or 190 days), the above schedule of the drugs intake does not qualitatively change. It should be noted only that with the reduction in the duration of this period, the first change in the schedule of taking medications begins to occur earlier (see
Figure 3 and
Figure 4 for 10 days), and with an increase in the duration of such a period, on the contrary, later (for example, 190 days).
From the comparison of the schedule of the medication intake for 100 days psoriasis treatment, one can conclude that a drug that suppresses the interaction between T-lymphocytes and keratinocytes predominates over a drug that suppresses the interaction between T-lymphocytes and dendritic cells. To show that this predominance is not absolute in psoriasis treatment, we (along with the values of the parameters of System (
1), the initial values (
2) and the control constraints (
3) presented in (
104), use the following values taken from [
13]:
The corresponding results of the numerical calculations are given in
Figure 5, which include the graphs of the optimal controls
,
, the corresponding optimal solutions
,
, and
, and the minimum value of the functional
of (
5). From the analysis of the graphs of controls
,
and Formula (
105), we conclude that for the majority of 100 days psoriasis treatment we use the maximum dosage of a drug suppressing the interaction between T-lymphocytes and dendritic cells. A drug that suppresses the interaction between T-lymphocytes and keratinocytes, should be used at the minimum dosage for 99 days and only on the last day the schedule of taking this medication should be changed to the maximum dosage. This is the first conclusion we draw from
Figure 5. The second conclusion is that unlike the results shown in
Figure 1 and
Figure 3, the first change in the schedule of taking drugs does not occur simultaneously in both, but only in one, which suppresses the interaction between T-lymphocytes and dendritic cells.
Figure 6 shows that with increasing duration of the period of psoriasis treatment (for example, to 150 days), the actual optimal control
responsible for taking a drug that suppresses the interaction between T-lymphocytes and dendritic cells has a period with a smooth increase in the dosage of the used medication (singular arc).
Finally, the graphs of the optimal solution
from
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5 and
Figure 6 show that the optimal concentration of keratinocytes
reaches at the end
T of the interval
the level, which is the minimal for the entire period
of psoriasis treatment. This fact is very important for the treatment of the disease.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





