
Joint Estimation of SOC of Lithium Battery Based on Dual Kalman Filter


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
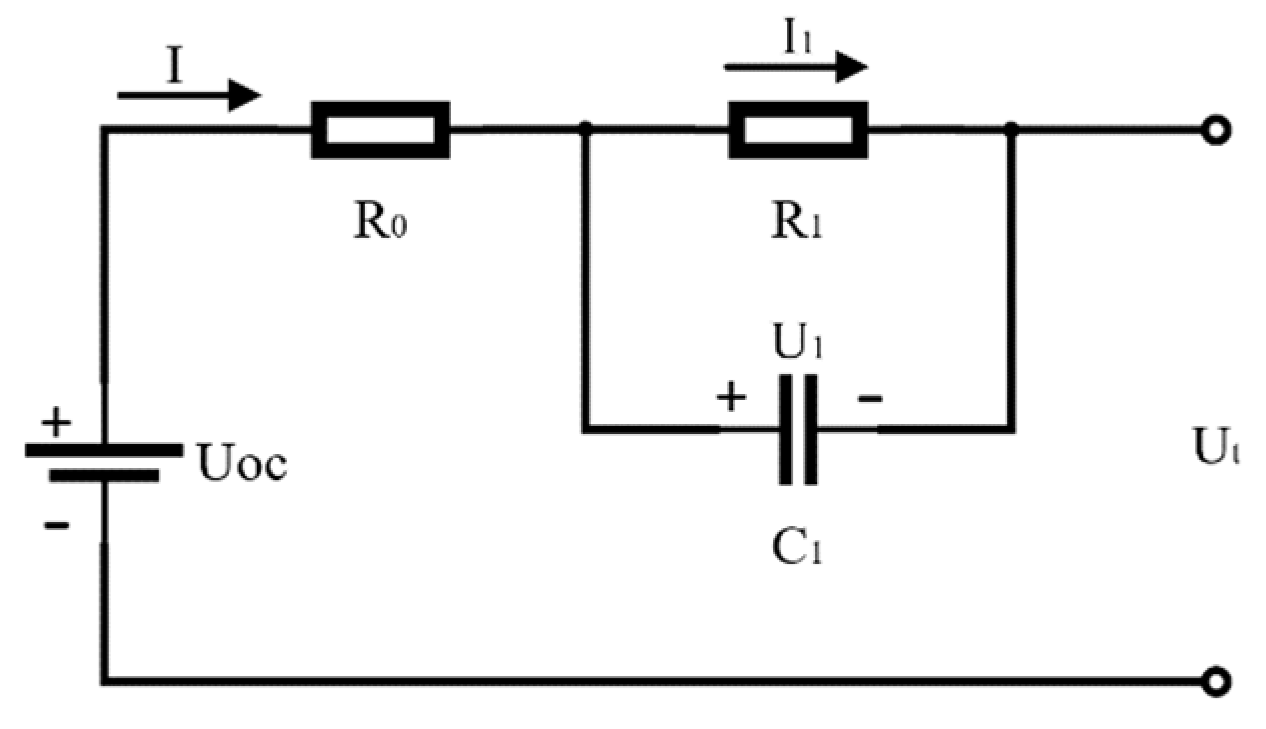
2. Establish the Equivalent Circuit Model of the Battery
3. EKF Algorithm
4. Model Parameter Identification
4.1. Online Identification Model Based on EKF
4.2. Optimizing Noise Matrix Based on IPSO
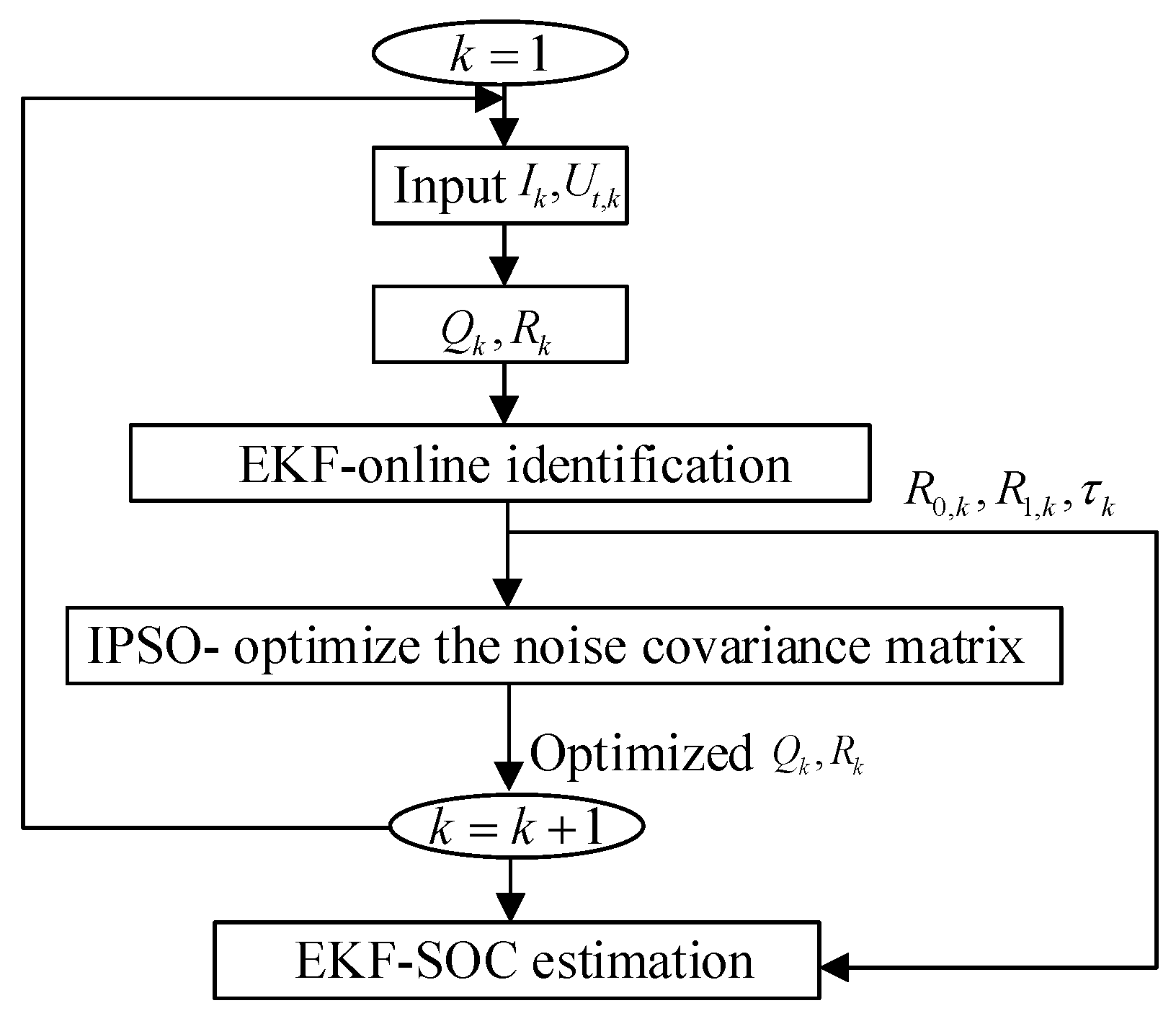
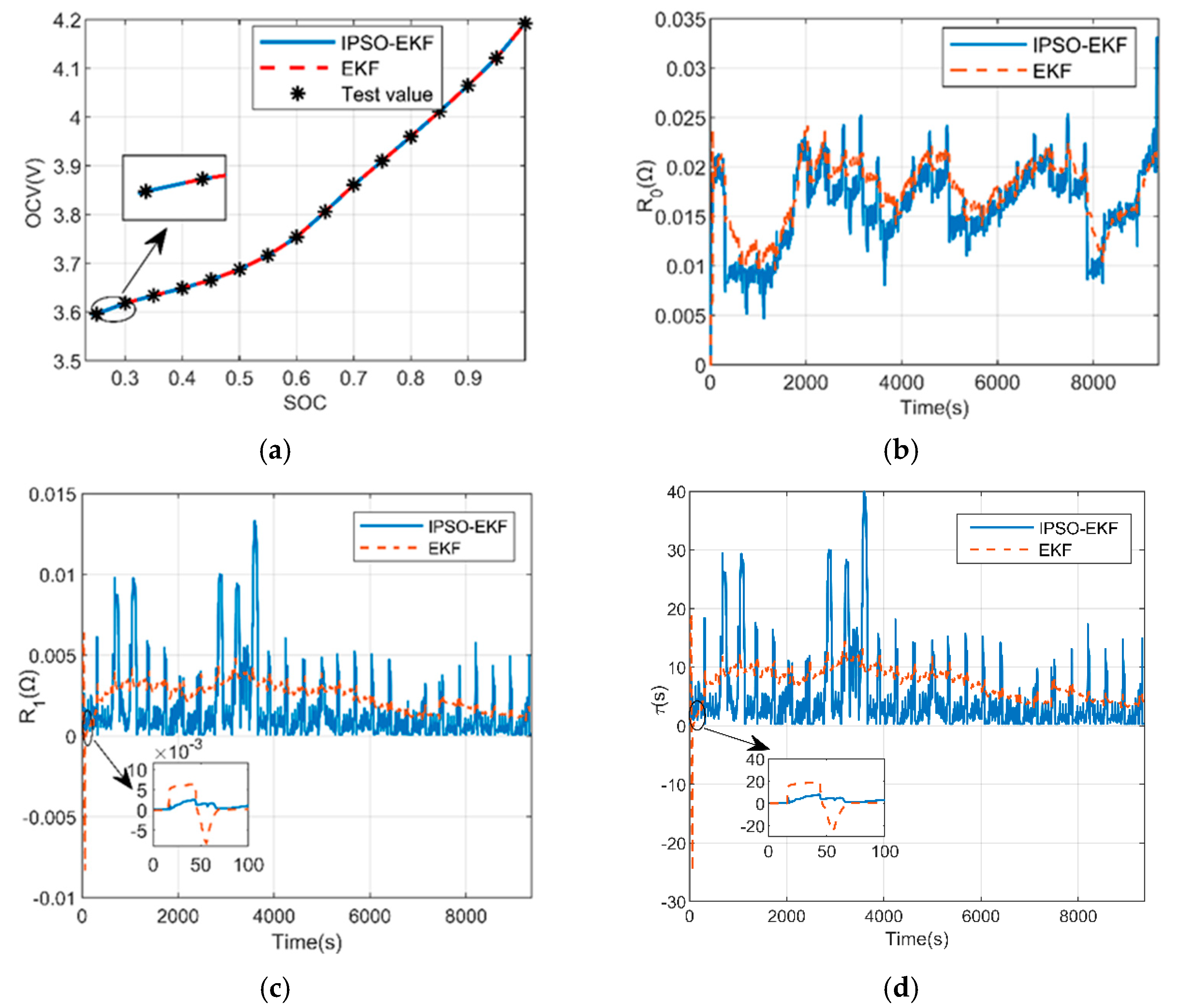
4.3. Identification Based on IPSO–EKF
- 1.
- EKF
- 2.
- IPSO
5. Battery SOC State Estimation
5.1. Comprehensive Battery Model
5.2. SOC Estimation Based on IPSO–DEKF
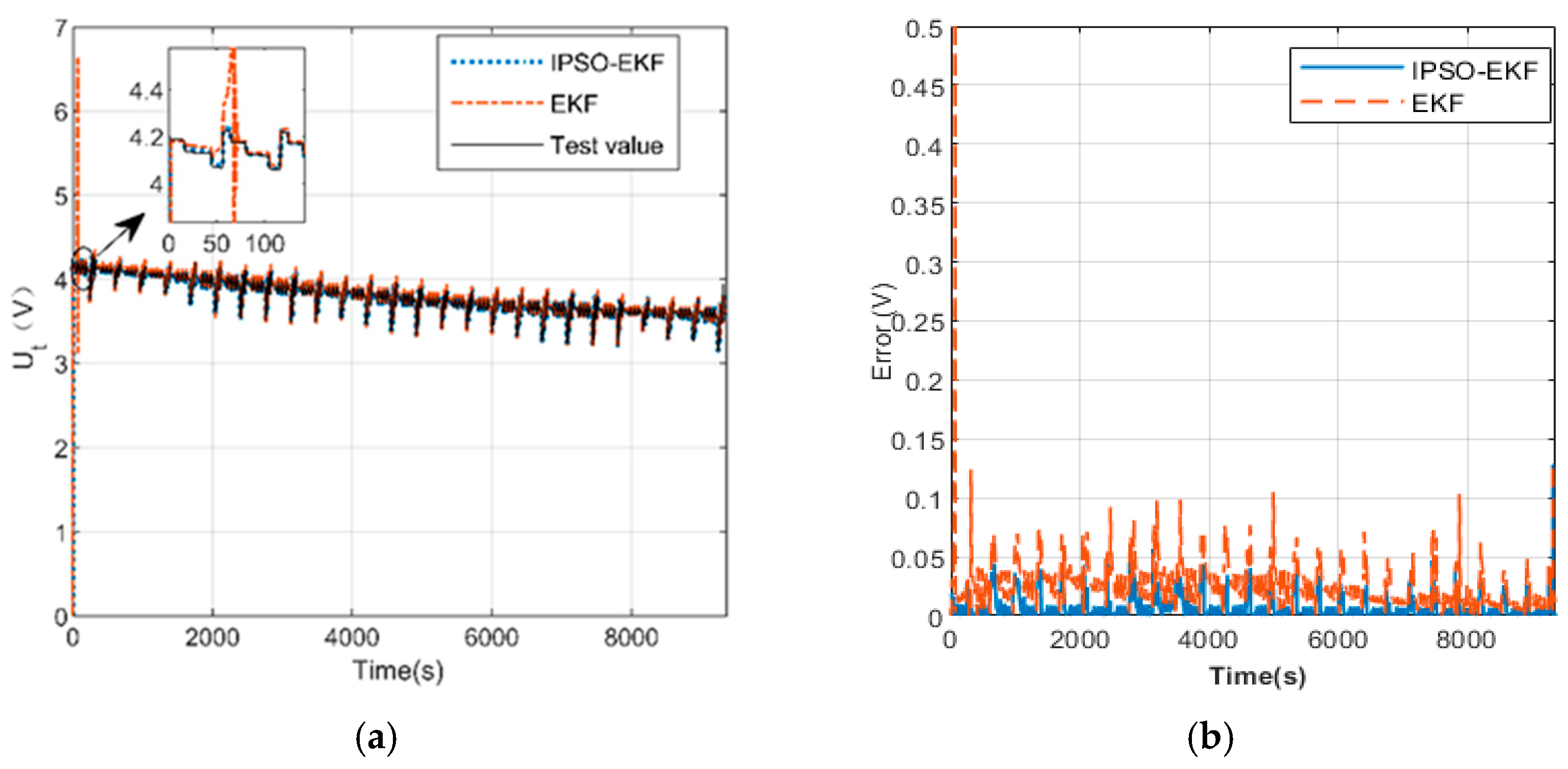
5.3. Test and Simulation Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, D.T.; Zhou, J.B.; Guo, L.M.; Peng, Y. A review of health assessment and life prediction of lithium-ion batteries. J. Instrum. 2015, 36, 1–16. [Google Scholar]
- Dai, H.F.; Wei, X.Z.; Sun, Z.C. State-of-charge estimation of lithium-ion power batteries for fuel cell vehicles based on extended Kalman filter algorithm. J. Mech. Eng. 2007, 2, 92–95+103. [Google Scholar] [CrossRef]
- Huang, K.; Guo, Y.F.; Li, Z.G. Characteristic modeling of power lithium-ion battery considering the effect of hysteresis. Grid Technol. 2017, 41, 2695–2702. [Google Scholar]
- Ye, M.; Guo, H.; Cao, B. A model-based adaptive state of charge estimator for a lithium-ion battery using an improved adaptive particle filter. Appl. Energy 2017, 190, 740–748. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Liu, X.; Liu, Z. Model-based state of charge and peak power capability joint estimation of lithium-ion battery in plug-in hybrid electric vehicles. J. Power Sources 2013, 229, 159–169. [Google Scholar] [CrossRef]
- Lee, J.; Nam, O.; Cho, B. Li-ion battery SOC estimation method based on the reduced order extended Kalman filtering. J. Power Sources 2007, 174, 9–15. [Google Scholar] [CrossRef]
- Han, Y.Y. Estimation of State of Charge of Lithium Battery Based on Improved Kalman Filter Algorithm. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2020. [Google Scholar]
- Yu, P.; Wang, S.L.; Yu, C.M. Lithium Battery SOC Estimation Based on Adaptive Fractional-Order Extended Kalman. Energy Storage Sci. Technol. 2021, 10, 335–341. [Google Scholar]
- Duan, J.; Wang, P.; Ma, W.; Qiu, X.; Tian, X.; Fang, S. State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter. Energies 2020, 13, 4197. [Google Scholar] [CrossRef]
- Kong, X.C.; Zhao, W.Z.; Wang, C.Y. Lithium battery SOC joint estimation based on BP-EKF algorithm. Automot. Eng. 2017, 39, 648–652. [Google Scholar]
- Wei, Z.N.; Yuan, K.K.; Cheng, L.X.; Wang, C.N.; Xu, H.H.; Sun, G.Q.; Zang, H.X. Identification of lithium battery parameters based on multi-information least squares algorithm. Power Syst. Autom. 2019, 43, 139–145. [Google Scholar]
- Luo, Y.; Qi, P.W.; Kan, Y.Z. Parameter Identification of Lithium Battery Model Based on Simulated Annealing Algorithm. Automot. Eng. 2018, 40, 1418–1425. [Google Scholar]
- Horiba, T.; Maeshima, T.; Matsumura, T. Applications of high power density lithium ion batteries. J. Power Sources 2005, 146, 107–110. [Google Scholar] [CrossRef]
- Wang, W.L.; He, F.; Zheng, Y.L. Estimation of Lithium Battery SOC Based on RLS-EKF Joint Algorithm. Power Technol. 2020, 44, 1498–1501+1505. [Google Scholar]
- Zhang, C.P.; Jiang, J.C. Identification of battery model parameters using extended Kalman filtering algorithm based on genetic optimization. J. Jilin Univ. 2012, 42, 732–737. [Google Scholar]
- Xiong, R.; He, H.W.; Xu, Y.L.; He, Y. Modeling and parameter identification methods for power battery packs for electric vehicles. J. Jilin Univ. 2012, 42, 809–815. [Google Scholar]
- Pang, Z.H.; Cui, H. System Identification and Adaptive Control MATLAB Simulation, 1st ed.; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2013; pp. 30–45. [Google Scholar]
- Partovibbakhsh, M.; Liu, G. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State of Charge of Lithium-Ion Batteries for Autonomous Mobile Robots. IEEE Trans. Control Syst. Technol. 2015, 23, 357–363. [Google Scholar] [CrossRef]
- Tian, J.; Zeng, Q.; Wang, P.; Wang, X. Active steering control based on preview theory for articulated heavy vehicles. PLoS ONE 2021, 16, e0252098. [Google Scholar] [CrossRef]
- Zheng, L.D.; Dong, J.Y.; Ma, Q. SOC Estimation of Lithium Battery Based on Parameter Identification and AEKF. Power Technol. 2020, 44, 1502–1505. [Google Scholar]
- Yang, J.; Wang, T.; Du, C.Y.; Min, F.Q.; Lu, T.L.; Zhang, Y.X.; Yan, L.Q.; Xie, J.Y.; Yin, G.P. A review of lithium-ion battery model research. Energy Storage Sci. Technol. 2019, 8, 58–64. [Google Scholar]
- Huang, X.G.; Zhang, C.P. Applicability study of electric vehicle lithium-ion battery circuit model. Power Technol. 2011, 35, 1354–1357. [Google Scholar]
- Xu, X.; Zhang, L.; Jiang, Y.; Chen, N. Active control on path following and lateral stability for truck–trailer combinations. Arabian J. Sci. Eng. 2019, 44, 1365–1377. [Google Scholar] [CrossRef]
- Xie, Y.; Zheng, J.; Li, W. An improved electrothermal-coupled model for the temperature estimation of an air-cooled battery pack. Int. J. Energy Res. 2020, 44, 2037–2060. [Google Scholar] [CrossRef]
- Tan, F.M.; Wang, Q. Power Battery SOC Estimation Model Based on Improved Unscented Kalman Filter Algorithm. Automot. Technol. 2019, 3, 18–24. [Google Scholar]
- Xu, X.; Lin, P. Parameter identification of sound absorption model of porous materials based on modified particle swarm optimization algorithm. PLoS ONE 2021, 16, e0250950. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zheng, Y.; Yu, Y. Joint Estimation of SOC of Lithium Battery Based on Dual Kalman Filter. Processes 2021, 9, 1412. https://doi.org/10.3390/pr9081412
Wang H, Zheng Y, Yu Y. Joint Estimation of SOC of Lithium Battery Based on Dual Kalman Filter. Processes. 2021; 9(8):1412. https://doi.org/10.3390/pr9081412
Chicago/Turabian StyleWang, Hao, Yanping Zheng, and Yang Yu. 2021. "Joint Estimation of SOC of Lithium Battery Based on Dual Kalman Filter" Processes 9, no. 8: 1412. https://doi.org/10.3390/pr9081412
APA StyleWang, H., Zheng, Y., & Yu, Y. (2021). Joint Estimation of SOC of Lithium Battery Based on Dual Kalman Filter. Processes, 9(8), 1412. https://doi.org/10.3390/pr9081412