
Reliability Study of Parameter Uncertainty Based on Time-Varying Failure Rates with an Application to Subsea Oil and Gas Production Emergency Shutdown Systems

Abstract
:1. Introduction
2. Modeling and Modification
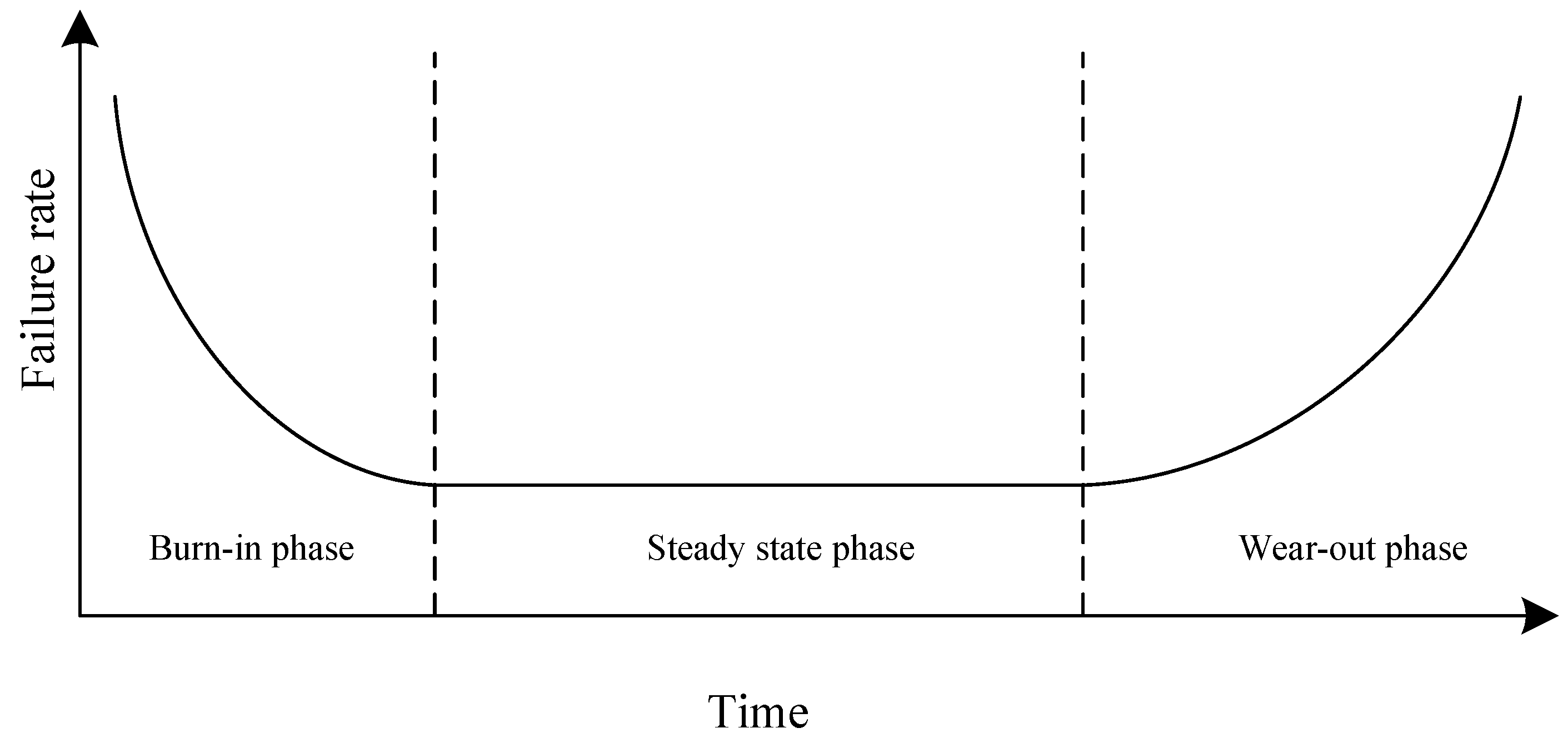
2.1. Time-Varying Failure Rate Model
- Steady state phase. The failure distribution is consistent with the bottom of the “bathtub curve” when the equipment is running normally, which means the failure rate is constant. The time-varying scale factor is a constant value of 1 in this phase.
- Wear-out phase. The wear-out phase is usually described by Weibull distribution, because the shape parameter in Weibull distribution is excessive that will lead to a rapid rising trend of failure rate [22], the time-varying scale factor of the wear-out phase in this study adopts an exponential function to reasonably describe the rising trend of “bathtub curve”.where is the failure rate cumulated parameter of equipment, and T is the duration of the steady state phase. Combined with the previous equations, the TFR model of this paper is determined as:
2.2. Statistical-Fuzzy Model of the Failure Rate Cumulated Parameter
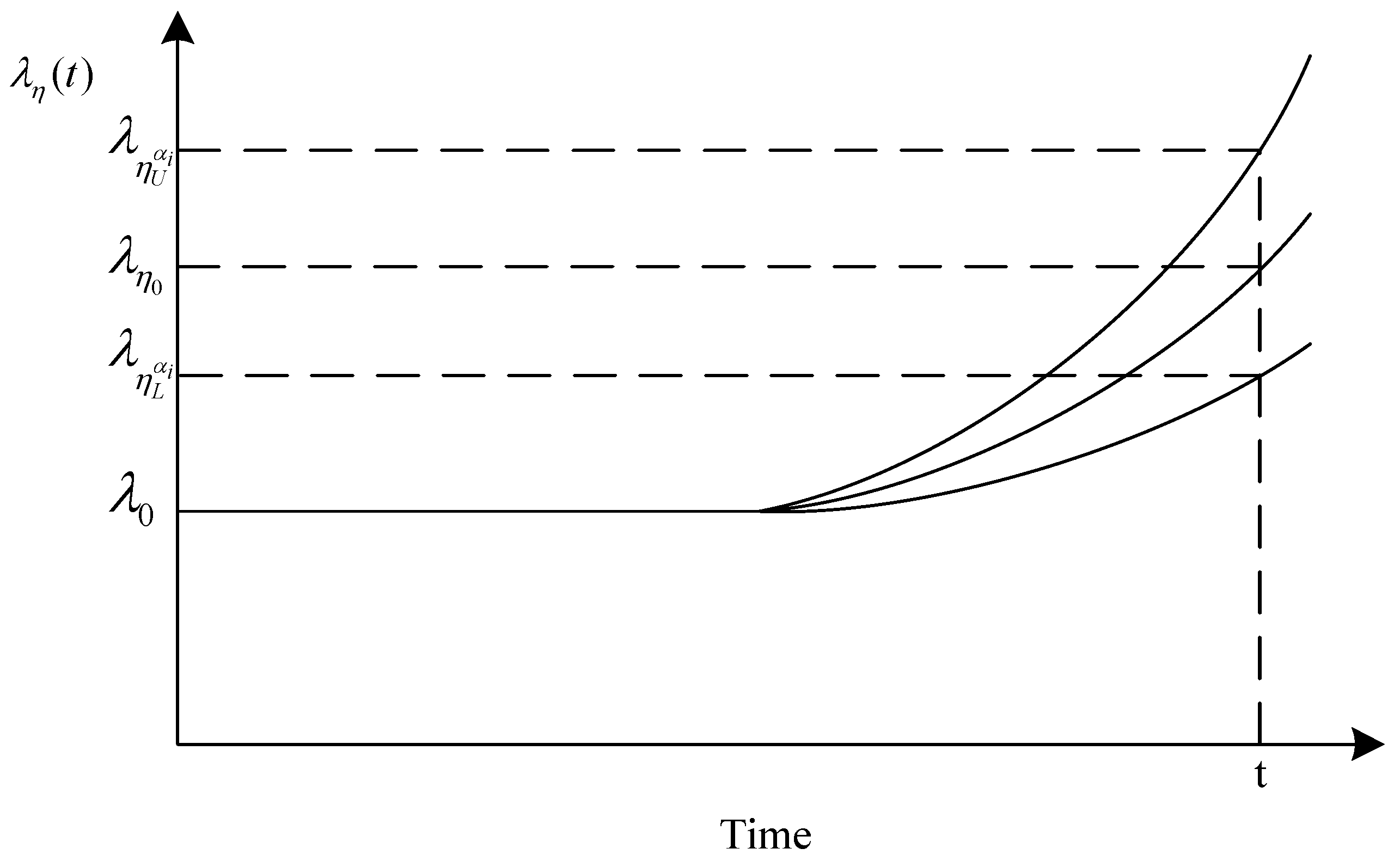
2.3. Modification of Time-Varying Failure Rate Model
3. The Existence Proof of Upper Boundary of Modified TFR Region
3.1. The Upper Boundary Existence Theorem and Proof
3.2. Numerical Example
4. Study Case
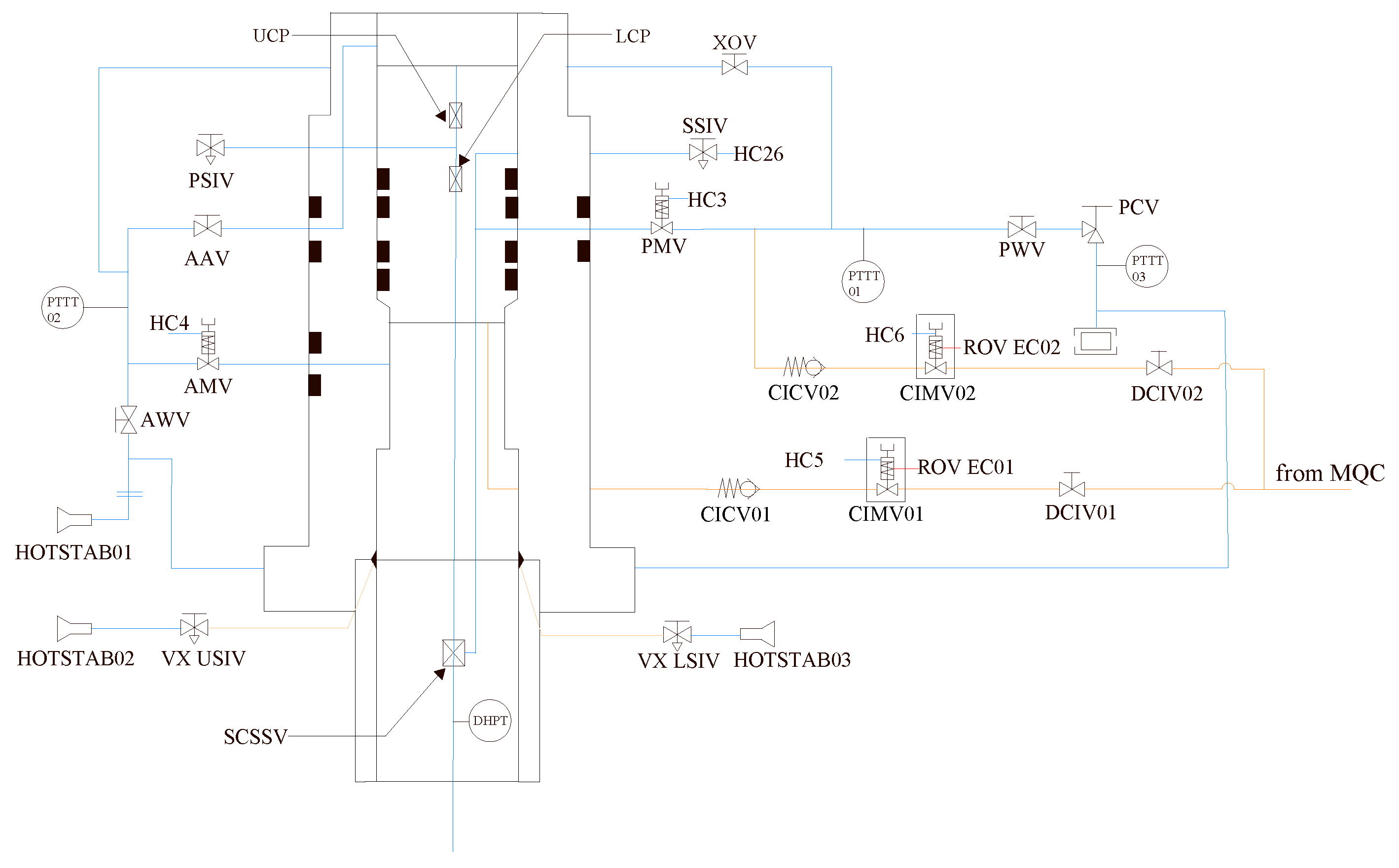
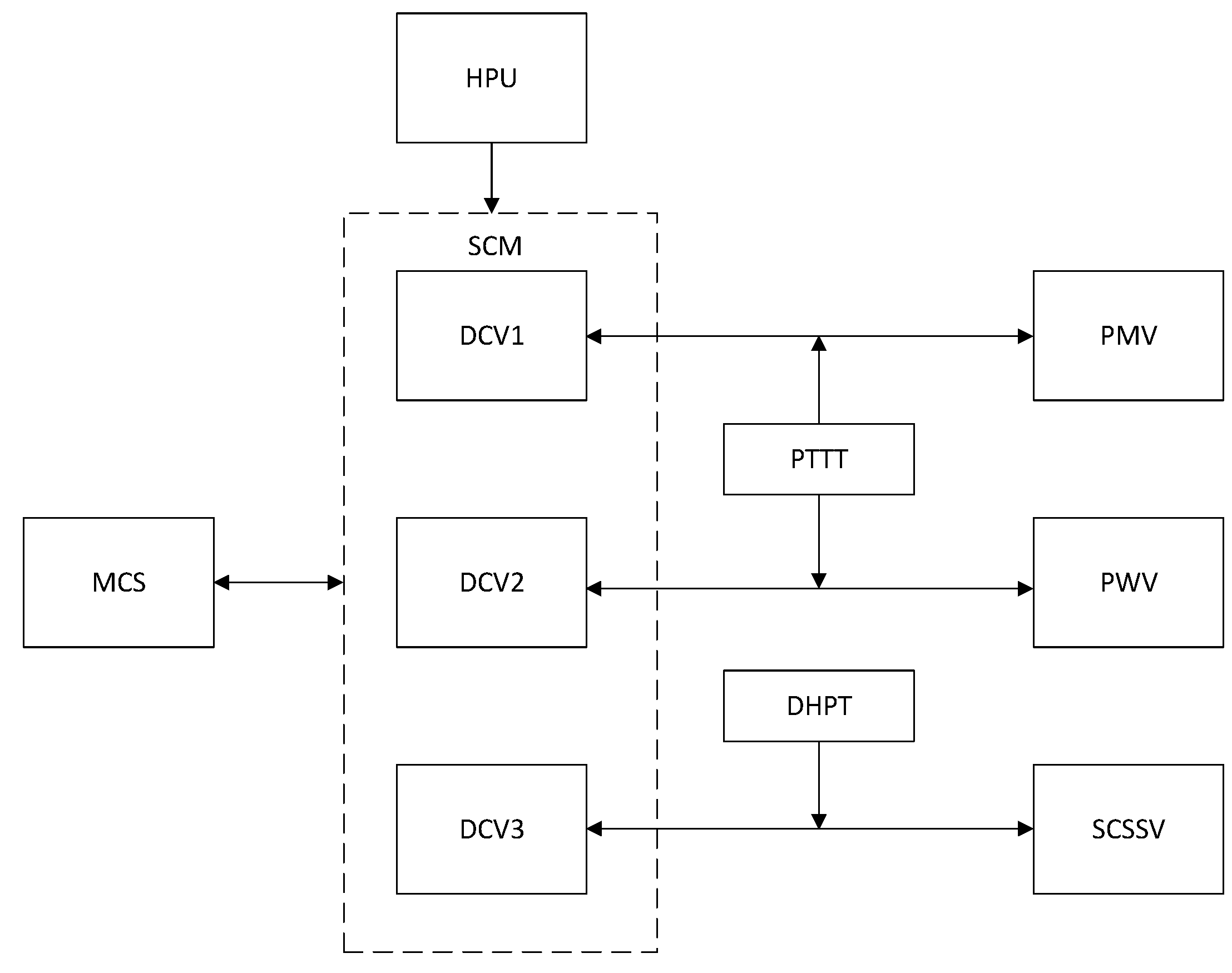
4.1. Reliability Model of Subsea Emergency Shutdown System Based on Time-Varying Failure Rate
- Equipment reliability model based on time-varying failure rate model before modification. The TFR model for each equipment of the subsea ESD system before modification is obtained using (4), then the reliability model of the equipment is as follows:When , , and , respectively, represent the reliability, failure rate in the steady state phase and the single value of failure rate cumulated parameter of the equipment PTTT, DHPT, MCS, HPU, SCM, DCV1, PMV, DCV2, PWV, DCV3, and SCSSV in this system.
- Equipment reliability model based on time-varying failure rate model after modification. The modified TFR model (14)–(17), for a given , when ,When ,Substituting the reliability model before and after modification of the equipment (35)–(37) into (34), the reliability models of the system based on the TFR model before and after modification are obtained.
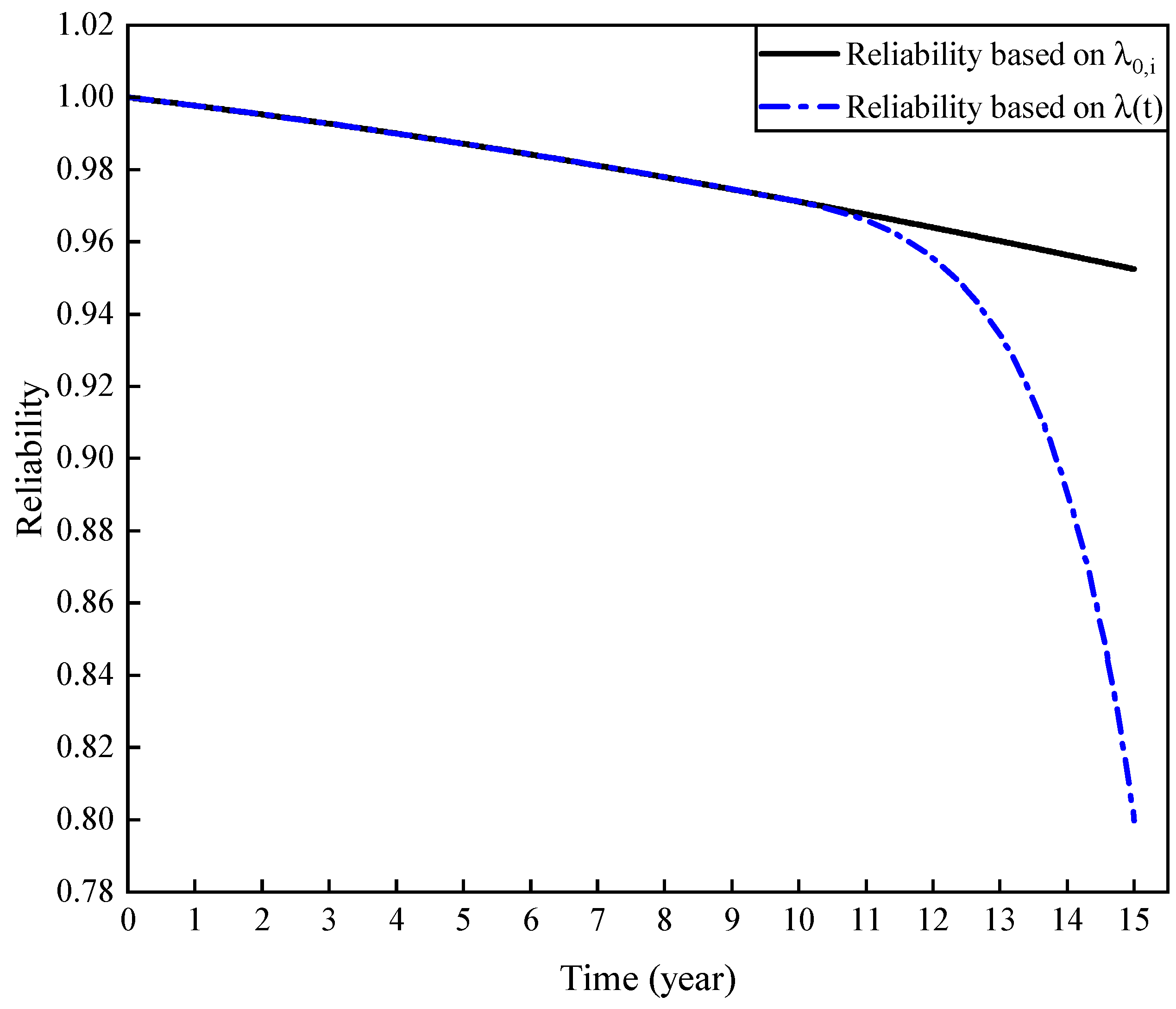
4.2. Reliability Comparison and Analysis Based on Time-Varying Failure Rate and Constant Failure Rate Models
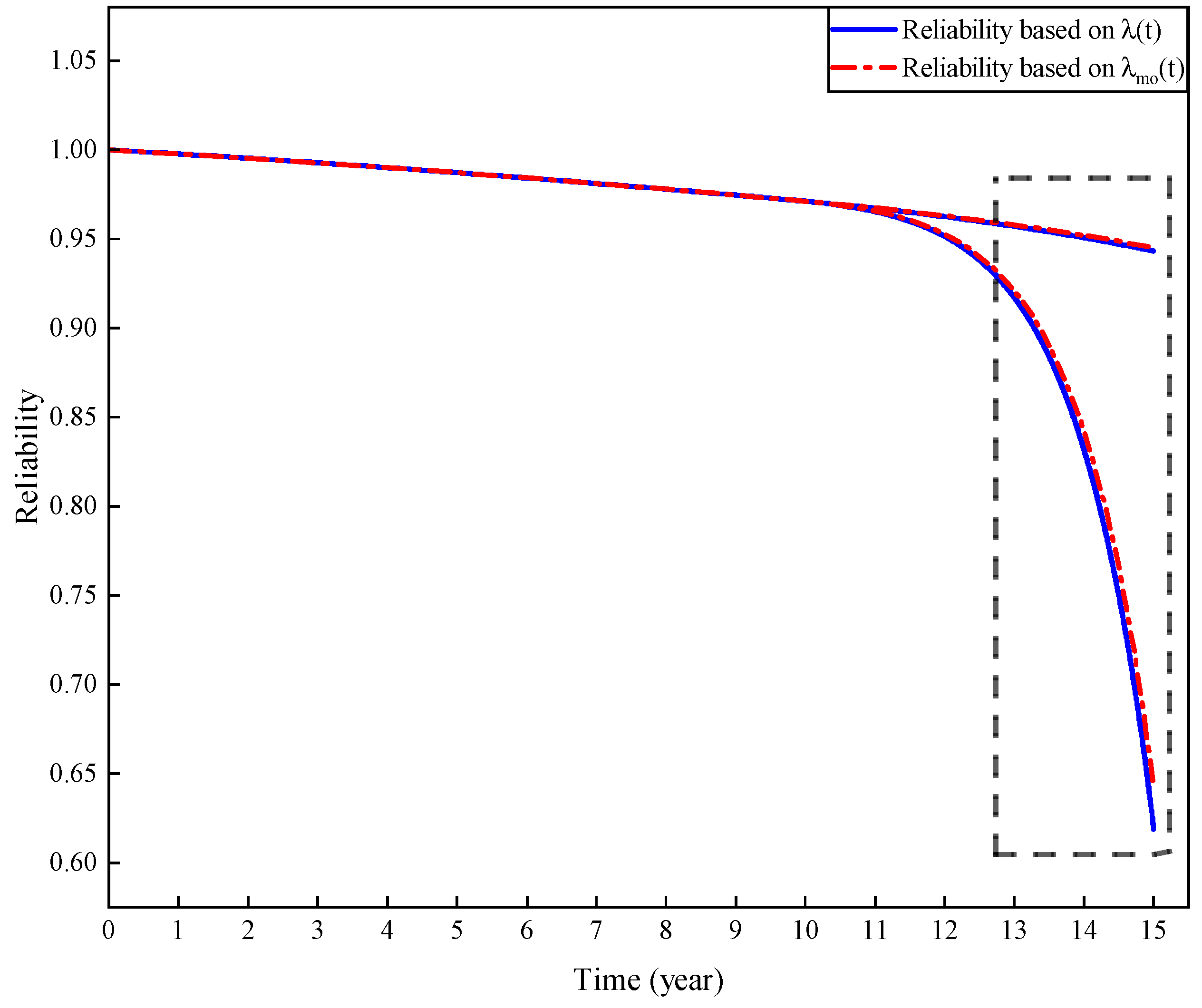
4.3. Reliability Comparison and Analysis of Time-Varying Failure Rate Models before and after Modification
5. Conclusions
- Compared with the constant failure rate, the system reliability with the time-varying failure rate decreases faster and reaches 0.7995 in the fifteenth year. The reliability in the fifteenth year in engineering experience is about 0.8, so the time-varying failure rate model proposed in this paper is consistent with the actual situation and can eliminate the reliability evaluation error caused by the constant failure rate.
- Compared with the model before the modification, the modified time-varying failure rate model has the confidence of attached, which increases the end value of the system reliability interval containing uncertainty, and the reliability interval obtained after the modification is more accurate and realistic.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ESD | Emergency shutdown |
| CFR | Constant failure rate |
| TFR | Time-varying failure rate |
| OREDA | Offshore and onshore reliability data |
| SCM | Subsea control module |
| PG | Pseudo-gaussian |
| PT | Pressure transmitter |
| PLC | Programmable logic controller |
| V1 | Valve 1 |
| V2 | Valve 2 |
| BPCS | Basic process control system |
| SIS | Safety instrumented system |
| MCS | Master control station |
| HPU | Hydraulic power unit |
| PTTT | Pressure transmitter and temperature transmitter |
| DHPT | Downhole pressure and temperature transmitter |
| PMV | Production master valve |
| PWV | Production wing valve |
| SCSSV | Surface controlled subsurface safety valve |
| DCV1 | Directional control valve 1 |
| DCV2 | Directional control valve 2 |
| DCV3 | Directional control valve 3 |
References
- Zhang, Y.; Tang, W.; Du, J. Development of subsea production system and its control system. In Proceedings of the 2017 4th International Conference on Information, Cybernetics and Computational Social Systems (ICCSS), Dalian, China, 24–26 July 2017; pp. 117–122. [Google Scholar] [CrossRef]
- Lyalla, I.; Arulliah, E.; Innes, D. A critical analysis of open protocol for subsea production controls system communication. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.; Bai, Q. (Eds.) 7—Subsea Control. In Subsea Engineering Handbook, 2nd ed.; Gulf Professional Publishing: Boston, MA, USA, 2019; pp. 173–202. [Google Scholar] [CrossRef]
- Hua, Y.; Kecheng, S.; Xin, D.; Chao, Y.; Yuanlong, Y. Adaptability Analysis of SubseaOil and Gas Control System in Bohai Sea Region. Mech. Electr. Eng. Technol. 2021, 50, 60–63, 137. [Google Scholar]
- Yangfeng, F.; Guochu, C. Application of subsea electro-hydraulic control system in deepwater gas field project. China Pet. Chem. Stand. Qual. 2020, 40, 125–126. [Google Scholar]
- Lu, W.; Weizhenq, A. Comparison and Analysis of Subsea Production Control System. Petrochem. Ind. Technol. 2018, 25, 17–19. [Google Scholar]
- Nolan, D.P. (Ed.) Chapter 11—Emergency Shutdown. In Handbook of Fire and Explosion Protection Engineering Principles for Oil, Gas, Chemical, and Related Facilities, 4th ed.; Gulf Professional Publishing: Waltham, MA, USA, 2019; pp. 215–225. [Google Scholar] [CrossRef]
- Wang, X.; Jia, P.; Lizhang, H.; Wang, L.; Yun, F.; Wang, H. Reliability and Safety Modelling of the Electrical Control System of the Subsea Control Module Based on Markov and Multiple Beta Factor Model. IEEE Access 2019, 7, 6194–6208. [Google Scholar] [CrossRef]
- Pang, N.; Jia, P.; Wang, L.; Yun, F.; Wang, G.; Wang, X.; Shi, L. Dynamic Bayesian network-based reliability and safety assessment of the subsea Christmas tree. Process. Saf. Environ. Prot. 2021, 145, 435–446. [Google Scholar] [CrossRef]
- Bae, J.H.; Shin, S.C.; Park, B.C.; Kim, S.Y. Design Optimization of ESD (Emergency ShutDown) System for Offshore Process Based on Reliability Analysis. MATEC Web Conf. 2016, 52, 10. [Google Scholar] [CrossRef] [Green Version]
- Signorini, G.; Rigoni, E.; Rodrigues, M. Reliability Analysis Methodology for Oil and Gas Assets: Case Study of Subsea Control Module Operating in Deep Water Basin at Brazilian Pre-Salt. In Proceedings of the 2020 International Petroleum Technology Conference (IPTC), Dhahran, Saudi Arabia, 13–15 January 2020. [Google Scholar] [CrossRef]
- Ismagilov, F.; Vavilov, V.; Karimov, R.; Yushkova, O.; Timofeev, A. Combined Method of Technical Analysis to Optimize the Aviation Electromechanical Systems Reliability Indicators. In Proceedings of the 2021 28th International Workshop on Electric Drives: Improving Reliability of Electric Drives (IWED), Moscow, Russia, 27–29 January 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Tang, Q.; Shu, X.; Zhu, G.; Wang, J.; Yang, H. Reliability Study of BEV Powertrain System and Its Components—A Case Study. Processes 2021, 9, 762. [Google Scholar] [CrossRef]
- Tawfiq, A.A.E.; El-Raouf, M.O.A.; Mosaad, M.I.; Gawad, A.F.A.; Farahat, M.A.E. Optimal Reliability Study of Grid-Connected PV Systems Using Evolutionary Computing Techniques. IEEE Access 2021, 9, 42125–42139. [Google Scholar] [CrossRef]
- Hassett, T.; Dietrich, D.; Szidarovszky, F. Time-varying failure rates in the availability and reliability analysis of repairable systems. IEEE Trans. Reliab. 1995, 44, 155–160. [Google Scholar] [CrossRef]
- Retterath, B.; Venkata, S.; Chowdhury, A. Impact of time-varying failure rates on distribution reliability. In Proceedings of the 2004 International Conference on Probabilistic Methods Applied to Power Systems, Ames, IA, USA, 12–16 September 2004; pp. 953–958. [Google Scholar] [CrossRef]
- Wang, R.; Xue, A.; Huang, S.; Cao, X.; Shao, Z.; Luo, Y. On the estimation of time-varying failure rate to the protection devices based on failure pattern. In Proceedings of the 2011 4th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Weihai, China, 6–9 July 2011; pp. 902–905. [Google Scholar] [CrossRef]
- Abunima, H.; Teh, J. Reliability Modeling of PV Systems Based on Time-Varying Failure Rates. IEEE Access 2020, 8, 14367–14376. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, X.; Du, W.; Zhang, H.; Li, X. Reliability Model of Submarine Cable Based on Time-varying Failure Rate. In Proceedings of the 2019 IEEE 8th International Conference on Advanced Power System Automation and Protection (APAP), Xi’an, China, 21–24 October 2019; pp. 711–715. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Z.; Zhao, H.; Liu, H.; Tian, L.; Zhang, X.; Qiu, J.; Xue, C.; Zhang, X. Research on Prediction Model of Insulation Failure Rate of Power Transformer Considering Real-time Aging State. In Proceedings of the 2019 IEEE 3rd Conference on Energy Internet and Energy System Integration (EI2), Changsha, China, 8–10 November 2019; pp. 800–805. [Google Scholar] [CrossRef]
- Jian, L.; Feng, G.; Ming, Z.; Liuning, C.; Weiyao, L. Research on Optimal Inspection Strategy for Overhead Transmission Line Based on Smart Grid. Procedia Comput. Sci. 2018, 130, 1134–1139. [Google Scholar] [CrossRef]
- Liu, H.; Wang, Z.; Han, M. Reliability Analysis of Solenoid Valve Power Supply Based on Time-Varying Fault Rate. In Proceedings of the 2019 4th International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Hohhot, China, 25–27 October 2019; pp. 154–1543. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, M.; Hou, X.; Han, C.; Wang, X.; Liu, Z. The analysis of parameter uncertainty on performance and reliability of photovoltaic cells. J. Power Sources 2021, 507, 230265. [Google Scholar] [CrossRef]
- Fan, L.; Lübin, P.; Tao, N.; Bo, H.; Kan, C.; Kunpeng, Z. A method for obtaining unknown reliability parameters of components based on simulated annealing algorithm. Electr. Meas. Instrum. 2021, 58, 1–10. [Google Scholar]
- Wang, J.; Xu, Y.; Peng, Y.; Ye, Y. Estimation of Reliability Parameters of Protective Relays Based on Grey-three-parameter Weibull Distribution Model. Power Syst. Technol. 2019, 43, 1354–1360. [Google Scholar] [CrossRef]
- Laure Miranda, F.; Willer de Oliveira, L.; Henriques Dias, B.; Chaves de Resende, L.; Geraldo Nepomuceno, E.; José de Oliveira, E. Composite Power System Reliability Evaluation Considering Stochastic Parameters Uncertainties. IEEE Lat. Am. Trans. 2020, 18, 2003–2010. [Google Scholar] [CrossRef]
- Li, Z.; Yang, L.; Wang, D.; Zheng, W. Parameter Estimation of Software Reliability Model and Prediction Based on Hybrid Wolf Pack Algorithm and Particle Swarm Optimization. IEEE Access 2020, 8, 29354–29369. [Google Scholar] [CrossRef]
- Wang, Z.; Pan, R. Point and Interval Estimators of Reliability Indices for Repairable Systems Using the Weibull Generalized Renewal Process. IEEE Access 2021, 9, 6981–6989. [Google Scholar] [CrossRef]
- Uprety, I.; Patrai, K. Fuzzy Reliability Estimation Using Chi-Squared Distribution. In Proceedings of the 2016 3rd International Conference on Soft Computing Machine Intelligence (ISCMI), Dubai, United Arab Emirates, 23–25 November 2016; pp. 169–173. [Google Scholar] [CrossRef]
- Yang, X.; Yang, Y.; Liu, Y.; Deng, Z. A Reliability Assessment Approach for Electric Power Systems Considering Wind Power Uncertainty. IEEE Access 2020, 8, 12467–12478. [Google Scholar] [CrossRef]
- Wang, Z.; Shafieezadeh, A. On confidence intervals for failure probability estimates in Kriging-based reliability analysis. Reliab. Eng. Syst. Saf. 2020, 196, 106758. [Google Scholar] [CrossRef]
- Hu, L.; Yue, D.; Zhao, G. Reliability Assessment of Random Uncertain Multi-State Systems. IEEE Access 2019, 7, 22781–22789. [Google Scholar] [CrossRef]
- Li, X.Y.; Chen, W.B.; Li, F.R.; Kang, R. Reliability evaluation with limited and censored time-to-failure data based on uncertainty distributions. Appl. Math. Model. 2021, 94, 403–420. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Zhang, P.; Wang, B.; Lu, J. Reliability Analysis of Phasor Measurement Unit Considering Data Uncertainty. IEEE Trans. Power Syst. 2012, 27, 1503–1510. [Google Scholar] [CrossRef]
- Rausand, M. (Ed.) Chapter 2—Failure Model. In System Reliability Theory: Models, Statistical Methods, and Applications, 2nd ed.; National Defense Industry Press: Beijing, China, 2010; pp. 6–37. [Google Scholar]
- Xianhui, Y.; Haitao, W. Chapter 5—Reliability Model and Failure Data. In Functional Safety of Safety Instrumented Systems; Tsinghua University Press: Beijing, China, 2007; pp. 78–95. [Google Scholar]
- Bodsberg, L. Application of IEC 61508 and IEC 61511 in the Norwegian Petroleum Industry; The Norwegianoil Industry Association: Oslo, Norway, 2004; pp. 81–109. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | ||||
|---|---|---|---|---|
| PT | ||||
| PLC | ||||
| V1 | ||||
| V2 |
| Abbreviation | |||
|---|---|---|---|
| PTTT | |||
| DHPT | |||
| MCS | |||
| HPU | |||
| SCM | |||
| DCV1 | |||
| PMV | |||
| DCV2 | |||
| PWV | |||
| DCV3 | |||
| SCSSV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, X.; Yu, X.; Yue, Y.; Yin, F.; Zhu, C. Reliability Study of Parameter Uncertainty Based on Time-Varying Failure Rates with an Application to Subsea Oil and Gas Production Emergency Shutdown Systems. Processes 2021, 9, 2214. https://doi.org/10.3390/pr9122214
Zuo X, Yu X, Yue Y, Yin F, Zhu C. Reliability Study of Parameter Uncertainty Based on Time-Varying Failure Rates with an Application to Subsea Oil and Gas Production Emergency Shutdown Systems. Processes. 2021; 9(12):2214. https://doi.org/10.3390/pr9122214
Chicago/Turabian StyleZuo, Xin, Xiran Yu, Yuanlong Yue, Feng Yin, and Chunli Zhu. 2021. "Reliability Study of Parameter Uncertainty Based on Time-Varying Failure Rates with an Application to Subsea Oil and Gas Production Emergency Shutdown Systems" Processes 9, no. 12: 2214. https://doi.org/10.3390/pr9122214
APA StyleZuo, X., Yu, X., Yue, Y., Yin, F., & Zhu, C. (2021). Reliability Study of Parameter Uncertainty Based on Time-Varying Failure Rates with an Application to Subsea Oil and Gas Production Emergency Shutdown Systems. Processes, 9(12), 2214. https://doi.org/10.3390/pr9122214