1. Introduction
The electro-hydrostatic actuator (EHA) is a type of high-performance servo drive device originating from the field of aviation. It has the advantages of a high power-to-weight ratio, low operation and maintenance costs, environmental friendliness, and superior efficiency and energy saving [
1]. It has been successfully applied in automobile active suspension [
2], tank guns [
3], robots [
4], ships [
5] and in other fields. However, the EHA system uses the concept of a servo motor driving a metering pump for volume speed regulation. The coupling mechanisms between the mechanical, electronic and fluid components in the EHA system are complex; at the same time, due to the time-varying parameters of the external load, the internal leakage of the system, the oil compressibility and other non-linear factors, the dynamic and static performance of the system is limited, particularly with regard to the pressure pulsation problem under low-speed operating conditions. This issue seriously restricts the popularization and application of the system. With a view to investigating the pressure pulsation phenomenon inside the system under low-speed output conditions, researchers started with the causes of the pressure pulsation, and carried out relevant studies on the servo motor and the metering pump in the system as follows.
Under low-speed operation, the output speed of the servo motor fluctuates due to cogging torque, magnetic flux harmonic and other factors, resulting in the pulsation of the system output flow and pressure. To solve this problem, Liu et al. used a two-channel rotary transformer to measure the position of the universal joint, and deduced a feedback calibration method to solve the speed fluctuation problem of the servo motor under low-speed conditions, which improved the torque precision of the control momentum gyro [
6]. Makino et al. confirmed that the torque pulsation strongly depends on the parameters used in models of magnetizing curves and the torque-rotor position-current characteristic, and then presented two approaches to achieve precise torque control under the instantaneous current profiling technique in switched reluctance motors [
7]. Combining adaptive PID-type sliding mode control (APIDSMC), model reference adaptive control (MRAC) and periodic adaptive learning control (PALC), Zhang et al. introduced an adaptive PID-PALC compensation method in relation to energy efficiency, which suppressed the influence of the torque ripple in the permanent-magnet synchronous motor (PMSM) servo system, ensured good position control precision of the system and improved the energy utilization efficiency [
8]. Liu et al. analyzed the EM torque ripple of PMSM with a similar number of poles and slots, investigated the rotor step skewing method and harmonic current compensation method to reduce the EM torque ripple, and validated the effectiveness of the two optimization methods using the finite element method (FEM) and prototype experiments [
9]. Based on the permanent-magnet synchronous motor model, Bu et al. analyzed the reasons for torque ripple and influence and proposed a virtual torque control method for a direct drive permanent-magnet synchronous motor servo system at low speed. The analysis and experimental results showed that the proposed control method was effective for a smooth speed during low-speed running [
10]. Nos et al. proposed a control method to improve the position tracking accuracy of a low-speed servo system that uses multiple resonant terms in parallel and a traditional velocity proportional integral (PI) controller. The experimental results showed the viability and effectiveness of high-performance tracking operations through the elimination of the selected speed pulsations [
11]. Bu et al. proposed a rotor position tracking control (RPTC) strategy for the speed fluctuations of a direct-drive PMSM servo system operating at low speed under different torque perturbations that has a good speed performance for both periodic and aperiodic torque perturbations [
12]. In order to suppress the harmonic component in the stator current and reduce the torque ripple of the permanent-magnet synchronous motor, Huang et al. proposed a fractional-order based resonant controller (FOBR), which has a better harmonic suppression effect than the integer-order quasi-resonant controller and the pure proportional integral controller [
13]. Asama et al. proposed a novel double-layer annular winding slotless permanent-magnet motor to reduce the torque ripple of the servo motor, and applied it to the servo motor system with precise positioning control. The proposed double-layer annular winding layout reduced the torque ripple by 0.12%, and improved the dynamic and static performance of the system [
14]. Lin and Ting analyzed highly nonlinear factors, such as cog torque, stator current time harmonic and flux saturation of a synchronous reluctance motor, and then proposed a novel non-linear backstepping control system using the upper bound with a switching function for controlling the synchronous reluctance motor drive system to compensate for the lumped uncertainty [
15].
The above scholars mainly developed high-performance control strategies and optimized the structure of the servo motor to suppress its torque fluctuation. In practical engineering applications, the introduction of a high-performance control algorithm often increases the cost and cycle of research and development, resulting in a huge program volume and a high failure rate. Optimizing the body structure of a servo motor can weaken the influence of torque ripple to a certain extent, but there are often no mature reliable products to choose from in practical engineering.
Addressing the pressure pulsation phenomenon existing in the ration pump, Pan et al. analyzed the influence of swash plate vibration on the flow pulsation and pressure pulsation at the outlet of the axial piston pump, and established a theoretical model of the flow pulsation at the outlet of the pump. Based on the theoretical model, the valve plate was optimized [
16]. Wang and Wang modeled and simulated the axial piston pump based on AMESim software, and studied the flow pulsation characteristics under different factors. Theoretical analysis showed that the loading pressure, angular velocity, piston number and accumulator had obvious effects on the flow pulsation characteristics [
17]. In order to solve the problem of flow and pressure pulsation in a large-capacity high-pressure piston pump, Liu et al. proposed an effective method to connect multiple accumulators charging different pressures with the outlet chamber of the pump, and the parameters of the accumulators were optimized [
18]. By integrating the accumulator into the pump and optimizing the accumulator’s precharge pressure, Zhang et al. successfully reduced the pressure pulsation rate of the crankshaft seawater plunger pump from 17% to less than 5% [
19]. A dynamic analysis of the swash plate vibration and pressure pulsation of an aircraft piston pump was carried out by Ouyang et al. based on the fluid–structure coupling theory. The results of the research showed that the full fluid–structure interaction (FSI) model was much more accurate in predicting the vibration of the swash plate and the pulsation of the discharge pressure than the non-FSI model [
20]. Xu et al. studied the influence of speed, swash plate angle and working pressure on the flow pulsation of a pump, and tested the output flow pulsation of the pump. Compared with the pressure change, the test accuracy of flow pulsation was more sensitive to a change in speed [
21]. Zhang made use of computational fluid dynamics technology to carry out a visual simulation of the flow pulsation process of a water pressure axial piston pump. With and without considering cavitation, the flow pulsation rate and other parameters of the flow field under different speeds and different loads were obtained, respectively [
22]. Zhang et al. established a flow mathematical equation of a double-row axial piston pump, studied the flow pulsation of the piston pump with different structural parameters, such as the number and distribution of the plunger, and obtained the change laws of the flow pulsation of the double-row axial piston pump [
23]. Zhang demonstrated a pressure pulsation function model, simulated the function curve of pressure pulsation and solved the excitation problem necessary for the vibration and noise analysis of hydraulic pump systems [
24].
The above scholars considered the influence law of the swash plate angle and vibration of the plunger pump, the number and distribution of the plunger, the loading pressure, the cavitation of the working medium and other factors on the system pressure pulsation and flow pulsation, improving the pressure pulsation phenomenon to some extent by optimizing the structural design of the plunger pump.
In this paper, we take the EHA system as the research object, focus on the pressure pulsation phenomenon existing in the system, and improve the low-fast dynamic and static characteristics of the EHA by optimizing the accumulator volume and charging pressure parameters.
4. Low-Speed Characteristics of the EHA System
In the EHA system, the servo motor and the hydraulic pump are connected by coupling. The servo motor output speed is uneven due to cogging torque, flux harmonic and other factors. At the same time, the limitation of the plunger pump’s own structure directly causes the output flow pulsation of the plunger pump. In the presence of the load, the output flow pulsation of the piston pump causes the pressure pulsation in the system.
4.1. Analysis of Velocity Pulsation of Permanent-Magnet Synchronous Motor
The structure and control process of an AC permanent-magnet synchronous motor (PMSM) is the main source of PMSM speed pulsation, including cogent torque, flux harmonic, etc. The following is a theoretical analysis of these factors to obtain their influence on the velocity pulsation.
- (1)
Cogging torque
The cogging torque is closely related to the mechanical structure of the servo motor and is generated by the harmonic magnetic field of the tooth caused by stator slotting. Cogging torque has periodic characteristics, and its changing period is related to the rotor position, the amount of cogging and the number of magnetic poles. The magnetic pole of the permanent magnet is divided into several blocks of the same width. Without considering the effect of saturation and end effect, the Fourier series of the cogging torque of a single permanent magnet is expressed as follows:
where
is the cogging torque;
is the amplitude of the nth component of the cogging torque; and
is the least common multiple of the number of cogs and the number of magnetic poles.
When the motor is running at high speed, the harmonic frequency of the coiling torque will increase and the amplitude will decrease. This is due to the filtering effect of mechanical harmonics, which weakens the effect of the higher harmonics. When the motor is running at low speed, the amplitude of the harmonics will increase sharply, and the stability of the motor is greatly reduced. Therefore, the cogging torque is a non-negligible influence on the smooth operation of the motor at low speed.
- (2)
Harmonic flux
Due to the processing technology of a servo motor, the stator winding and permanent-magnet magnetic field cannot show an ideal sinusoidal spatial distribution, and due to the influence of the dead time effect, the stator current output by the inverter is mixed with many high-order harmonic currents, which are not sinusoidal. In the three-phase stationary coordinate system, the permanent-magnet flux linkage can be expressed as follows:
where
,
,
is the fundamental amplitude of the flux linkage in the three-phase coordinate system;
,
,
is the fifth harmonic amplitude of flux in the three-phase static coordinate system; and
,
,
is the seventh harmonic amplitude of flux in the three-phase static coordinate system.
By the Clark transformation and the Park transformation, the expression of the permanent-magnet flux in the d-q coordinate system is as follows:
where
,
is the fundamental amplitude of the flux linkage in the d-q coordinates system;
is the DC component of the flux linkage in the d-axis;
is the nth harmonic amplitude in the d-axis; and
is the nth harmonic amplitude in the q-axis.
According to the electromagnetic torque equation and Equation (18), the following can be obtained:
where
is the fundamental electromagnetic torque; and
and
are the sixth and seventh amplitude of the harmonic torque.
In summary, the cogging torque of AC PMSM varies periodically, and the disturbance period is related to the mechanical angular velocity, the number of cogging and the number of poles of the motor. Flux harmonics will introduce six-times higher harmonics, which cause current distortion and aggravate motor speed pulsation.
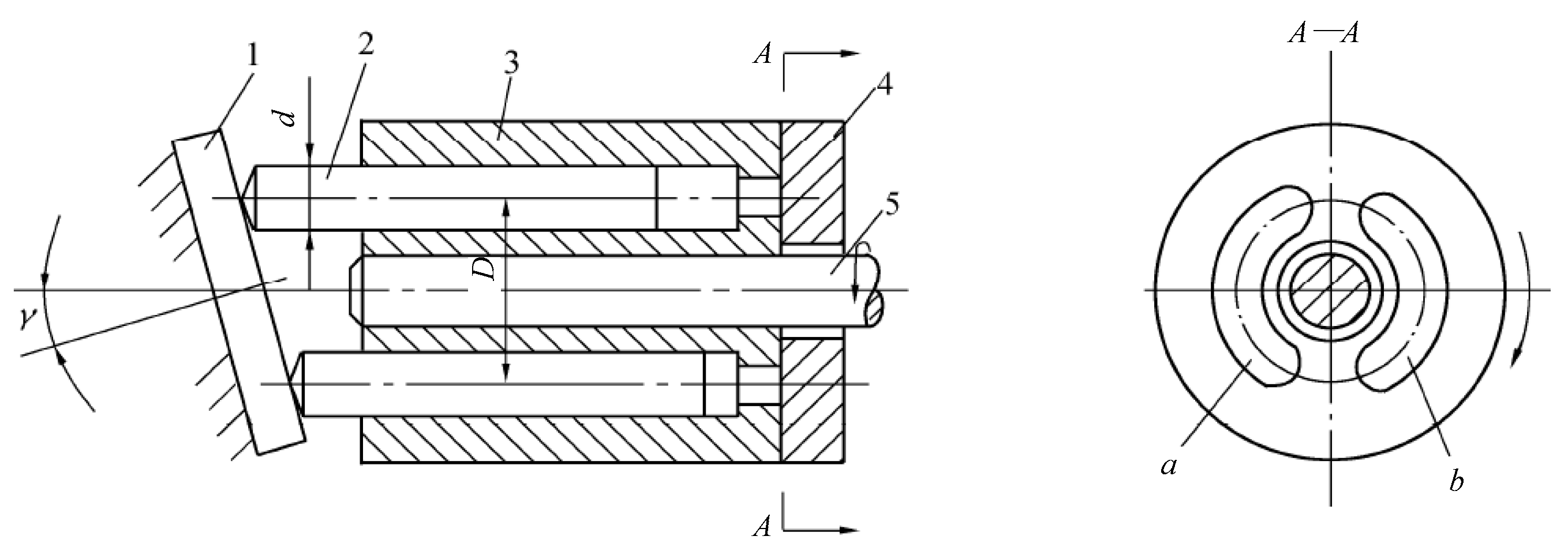
4.2. Analysis of Output Flow Pulsation of Swash Plate Axial Piston Pump
The motion of the single plunger in the swash plate axial piston pump can be considered as the synthesis of two motions: the reciprocating motion along the axis relative to the cylinder block and the rotary motion accompanying the cylinder block. The structure of the pump is shown in
Figure 8.
When the number of plungers of the pump is odd, the instantaneous flow of the pump is as follows;
where
is the diameter of plunger;
is the diameter of the center distribution circle of the plunger;
is the motor speed;
is the angle of inclination of the swash plate;
is the plunger quantity;
is the number of plungers in the oil drain process; and
is the angle of the drain plunger relative to top dead center.
If the Fourier series expansion of Equation (20) is carried out, the results are as follows:
The flow of the piston pump can be divided into the constant part and the variable part. and are the amplitude of fundamental wave and low-order harmonic in flow pulsation, respectively.
In conclusion, it can be seen that the structure of the plunger pump itself leads to the reduction of the flow output quality of the system under low-speed working conditions. At the same time, due to the liquid resistance in the system pipeline, the flow pulsation will inevitably cause pressure pulsation. When the pressure pulsation frequency is close to the natural frequency of the pipeline system, it is easy to produce the resonance phenomenon and damage the components in the system.
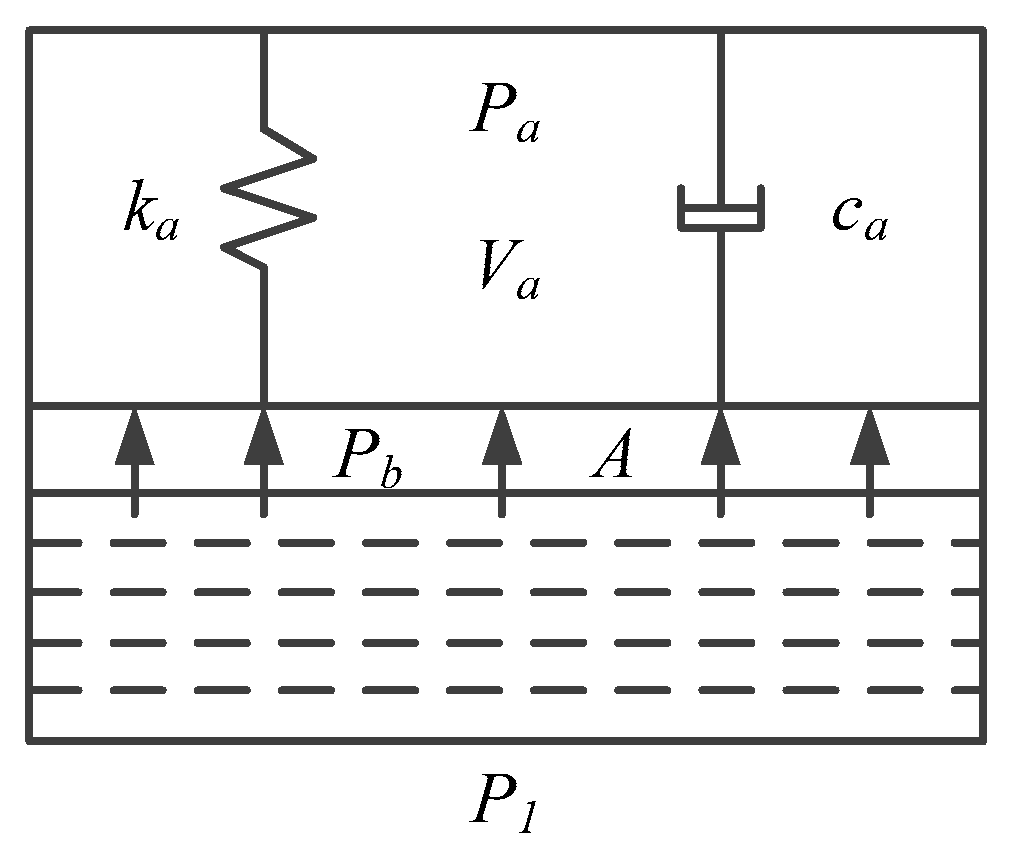
4.3. Study on Pressure Pulsation Absorbed by Accumulator at Low Speed
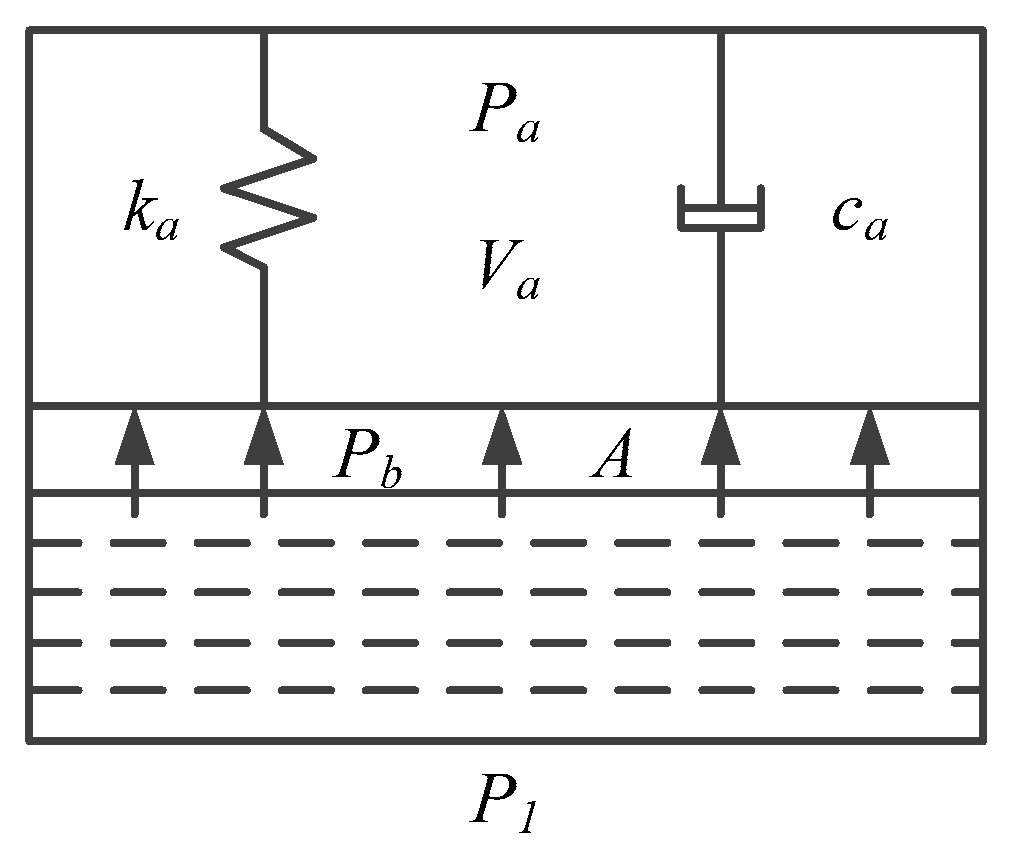
When there is flow pulsation in the hydraulic system, the accumulator can absorb the peak flow in the hydraulic pipeline and compensate the trough flow in the pipeline so as to reduce the flow pulsation and effectively reduce the pressure pulsation in the pipeline. The system adopts a bladder accumulator to absorb the pressure pulsation, which has the advantages of small running inertia and sensitive response.
According to the working principle of the accumulator, it can be simplified into the model shown in
Figure 9.
The force equation of the air chamber is as follows:
where
is the oil pressure in the accumulator;
is the gas pressure in the bladder;
is the gas stiffness coefficient of the bladder at any time of operation;
is the volume of gas in the bladder;
is the coefficient of gas damping;
is the coefficient of gas viscosity; and
is the cross-sectional area of the accumulator.
The volume change rate of the air chamber is opposite to the oil flow. Therefore, the above equation can be obtained by Laplace transformation:
where
is the Laplace transform of oil flow.
Analysis of the oil in the accumulator and the establishment of the force equation of the oil chamber is as follows:
where
is the pressure at the accumulator inlet;
is the mass of oil in the accumulator; and
is the viscous damping coefficient of oil.
Combined with Equations (23) and (24), the force equation of the accumulator oil chamber can be obtained as follows:
Applying the Laplace transform of the above equation and establishing the mathematical model of the accumulator with the oil inlet pressure as input and the gas chamber volume as output results in the following:
where
,
is the equivalent stiffness coefficient of the accumulator model;
,
is the undamped natural frequency of the accumulator; and
,
is the equivalent damping ratio of the accumulator gas chamber to liquid chamber.
When the accumulator has the best effect of absorbing pressure pulsation, the system is in a steady state, the oil stable pressure in the pipeline is equal to the nitrogen stable pressure in the accumulator, the system flow in the pipeline is equal to the hydraulic cylinder inlet flow and the accumulator neither absorbs nor emits the flow. At this time, the accumulator takes the oil flow rate as the input and the oil pressure as the output of the transfer function as follows:
where
is the stable pressure in the system piping;
is the flow in the system piping; and
is the oil density.
Establishing the system frequency characteristic function is as follows:
where
is the natural frequency of the accumulator; and
is the flow pulsation frequency of the pipeline.
The amplitude of the pressure pulsation and flow pulsation is as follows:
As can be seen from Equation (29), when the natural frequency of the accumulator is equal to the flow pulsation frequency in the pipeline, the amplitude ratio of the pressure pulsation to the flow pulsation has a minimum value, and the accumulator has the best effect of absorbing the pressure pulsation.
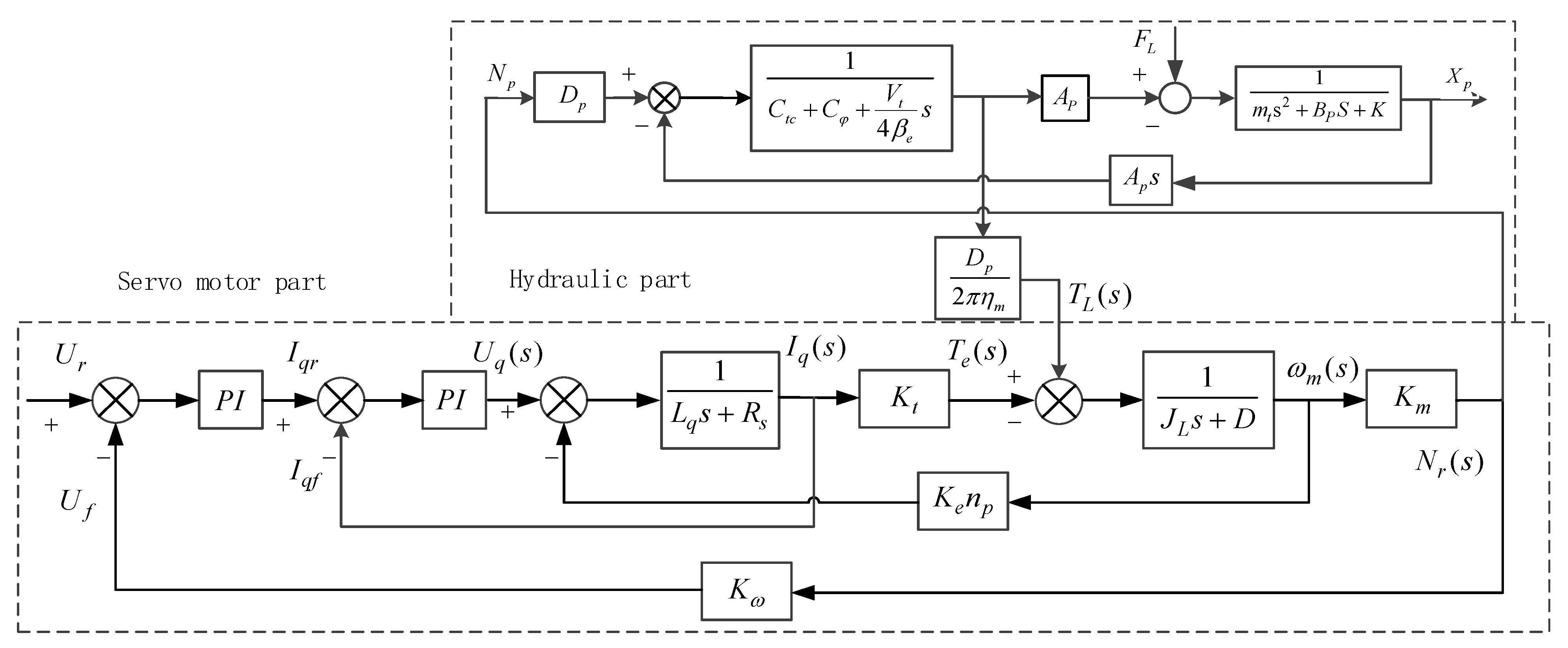
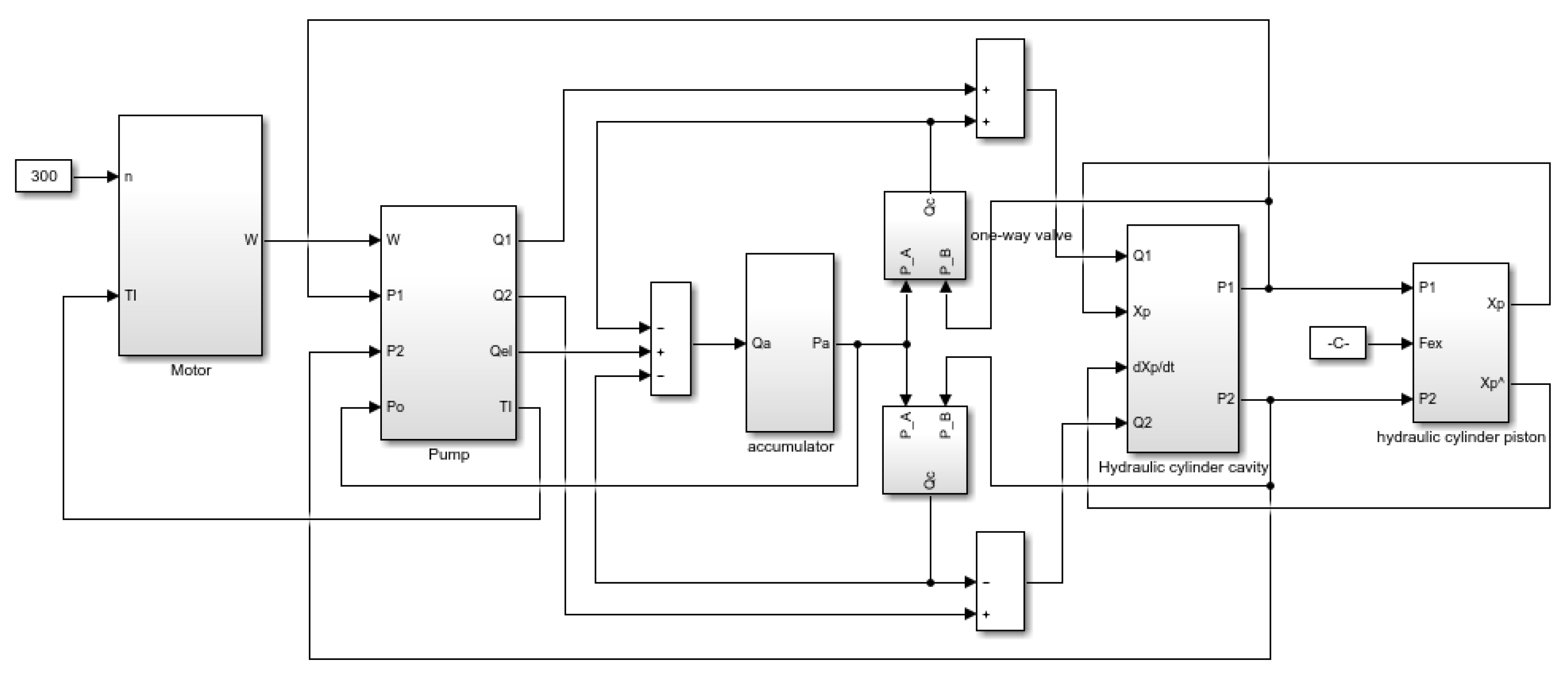
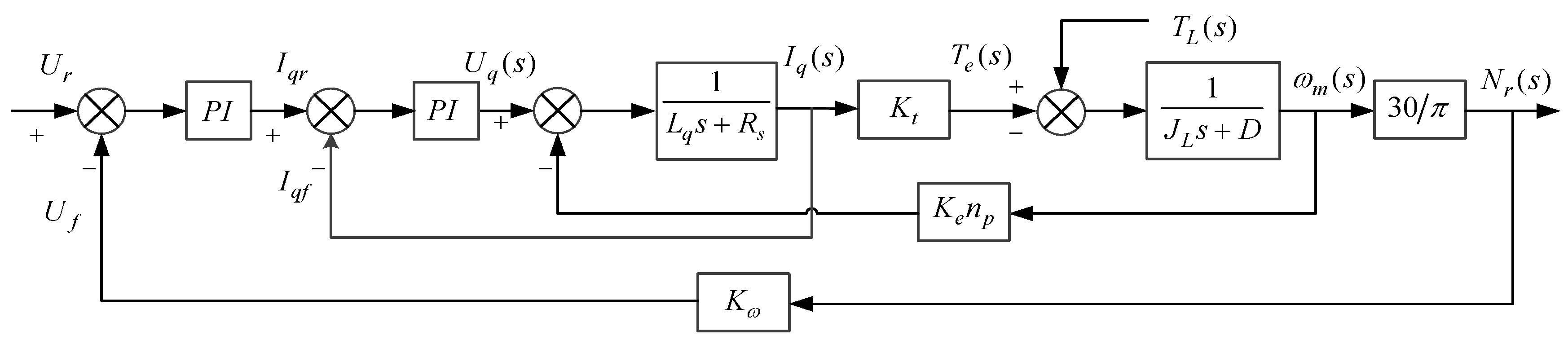
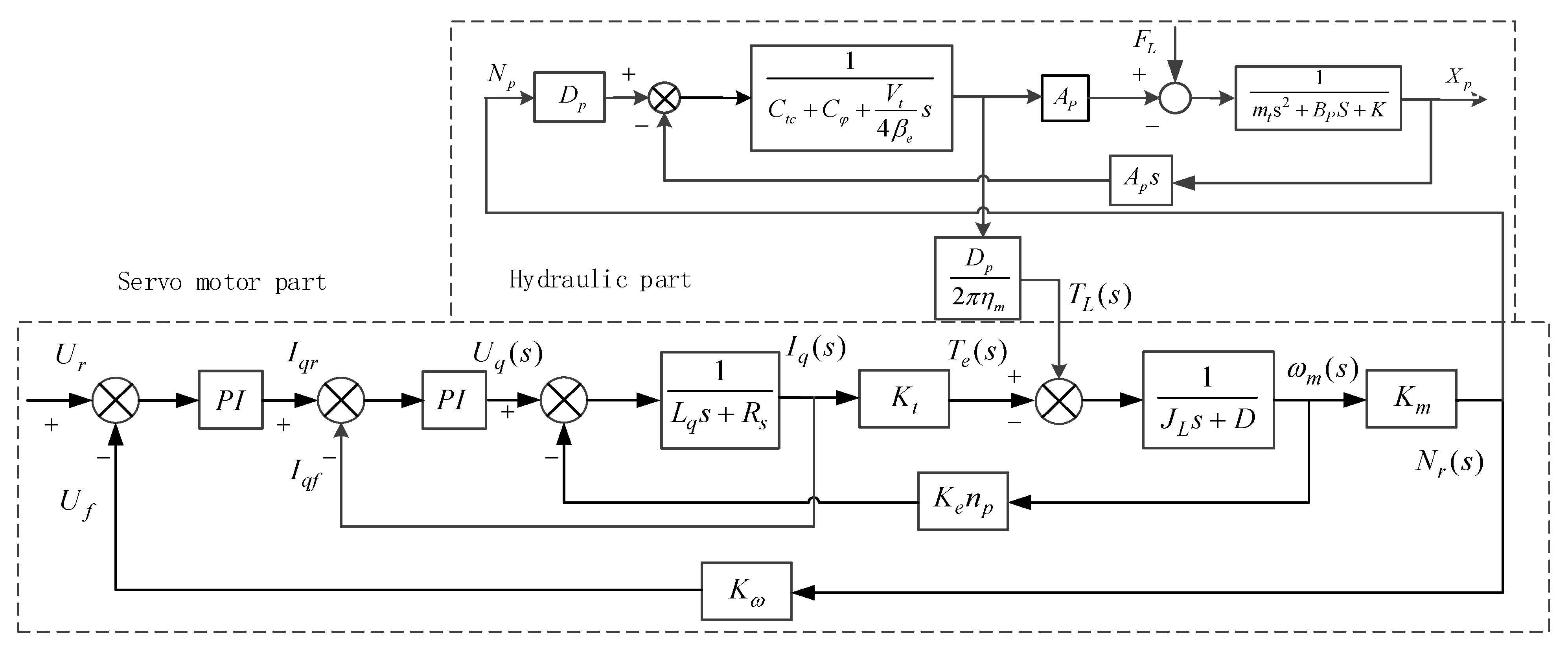
According to the overall control block diagram of the EHA system under low-speed conditions, the fourth-order servo motor system considering speed fluctuation is regarded as the superposition of the two second-order oscillation links, and the pressure pulsation caused by the flow pulsation of the plunger pump is regarded as the first-order inertia link. The transfer function with the given speed
of the servo motor as the input and the pressure pulsation
of the plunger pump as the output is written as follows:
At this time, the lowest frequency of the two second-order oscillation links is the dominant natural frequency, that is,
is the dominant natural frequency, and
can be used to approximately represent the overall natural frequency of the “motor-pump”. Allowing
, the expression of the inflation pressure parameter optimization value
of the accumulator absorbing the pressure pulsation is as follows:
The undamped natural frequency determines the response speed of the second-order system, and the damping ratio determines the oscillation performance of the second-order system. Increasing the damping ratio will reduce the oscillation, but will increase the response speed of the system. In classical control theory, when the damping ratio a of the second-order oscillation system is 0.707, a better comprehensive performance can be obtained. According to the expression of the accumulator equivalent damping ratio in Equation (26), the optimal value
of the accumulator inflation pressure parameter when
is as follows:
Combined with Equations (31) and (32), the optimal selection range of the charging pressure parameters of the accumulator based on and is obtained. This range takes into account the dynamic and static characteristics of the accumulator when absorbing the pressure pulsation, and effectively improves the problem of low-speed instability in the EHA system pressure control.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}