Robust Mixed H2/H∞ State Feedback Controller Development for Uncertain Automobile Suspensions with Input Delay



Abstract
:1. Introduction
2. System Model and Problem Formulation
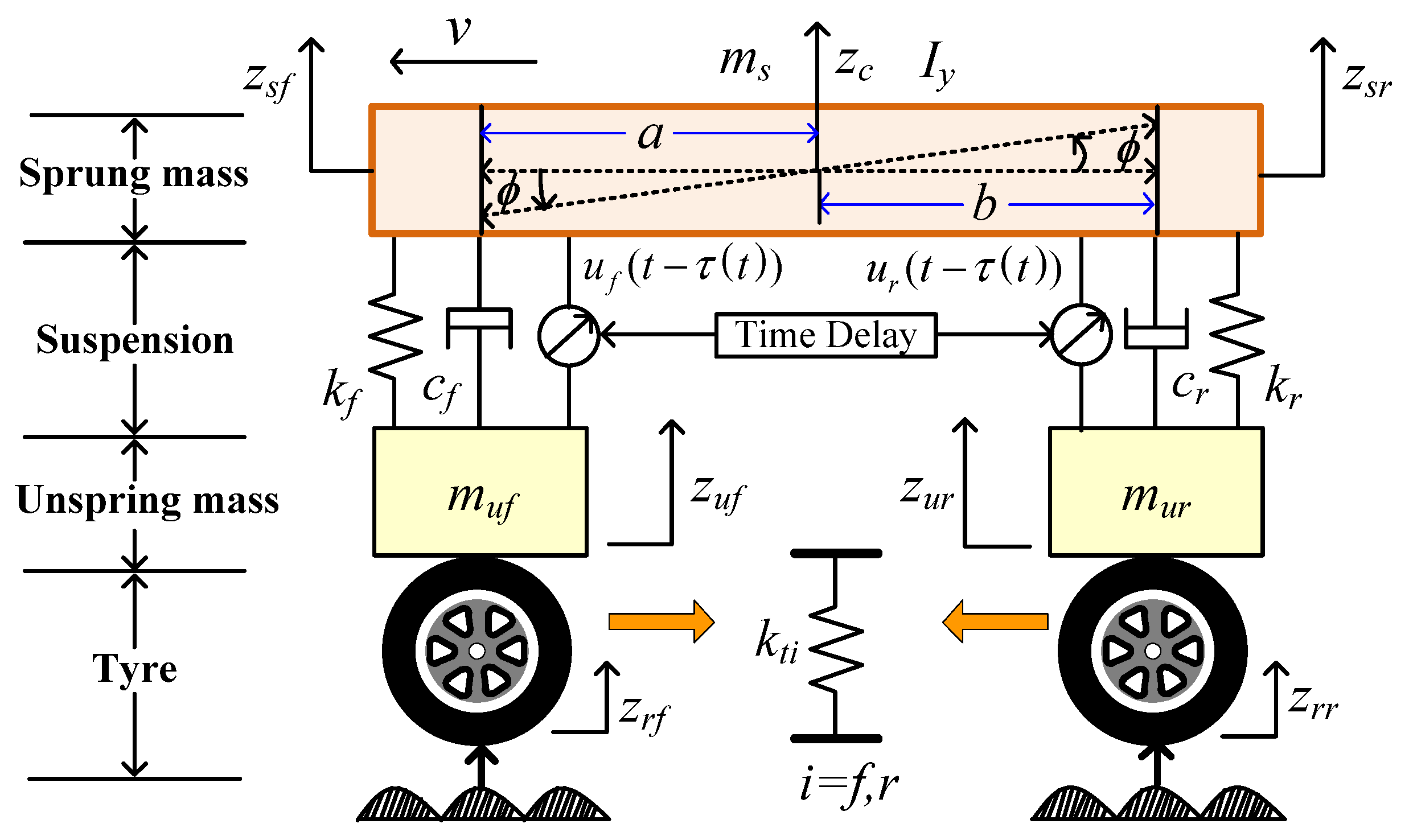
2.1. Automobile Active Suspension with Input Time Delay
2.2. Active Suspension Model with Time Delay and Parameter Uncertainties
- (a)
- The system in Equation (11) is asymptotically stable.
- (b)
- Given , the H∞ norm of the transfer function from to should be satisfied with Equation (12) under the zero initial conditions.where is a minimized positive value and .
- (c)
- Given and the positive constant , under zero initial conditions, the generalized H2 norm of the transfer function from to should be satisfied as follows:where , , indicates the deterministic constraint index in the vector .
3. Robust Controller Design with Input Delay and Parameter Uncertainties
4. Simulation Investigation and Discussion
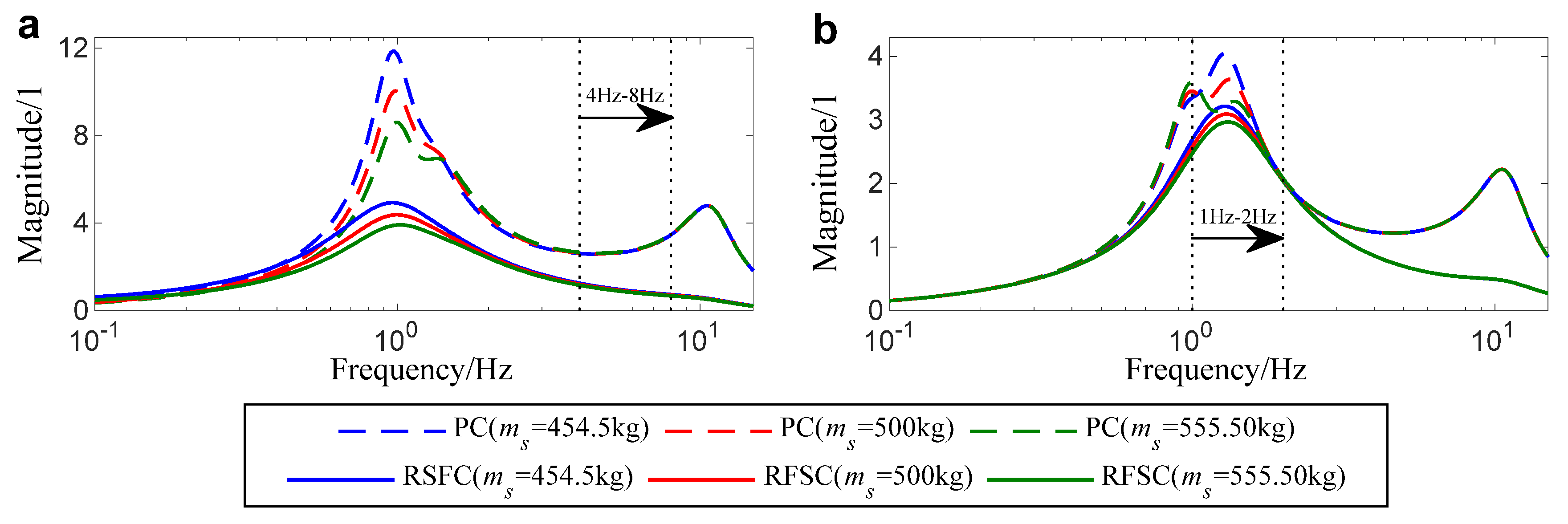
4.1. Simulation Results in Frequency Domain
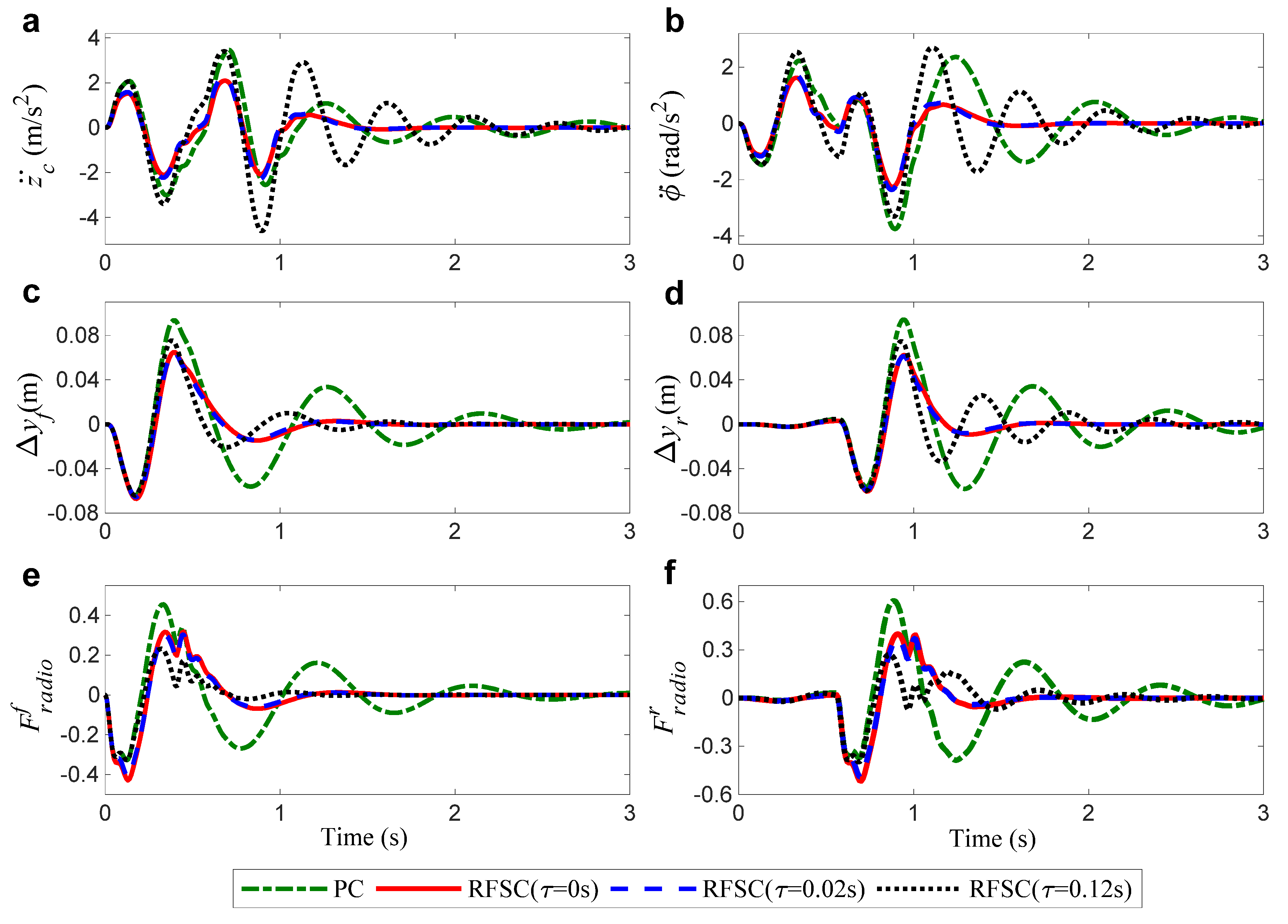
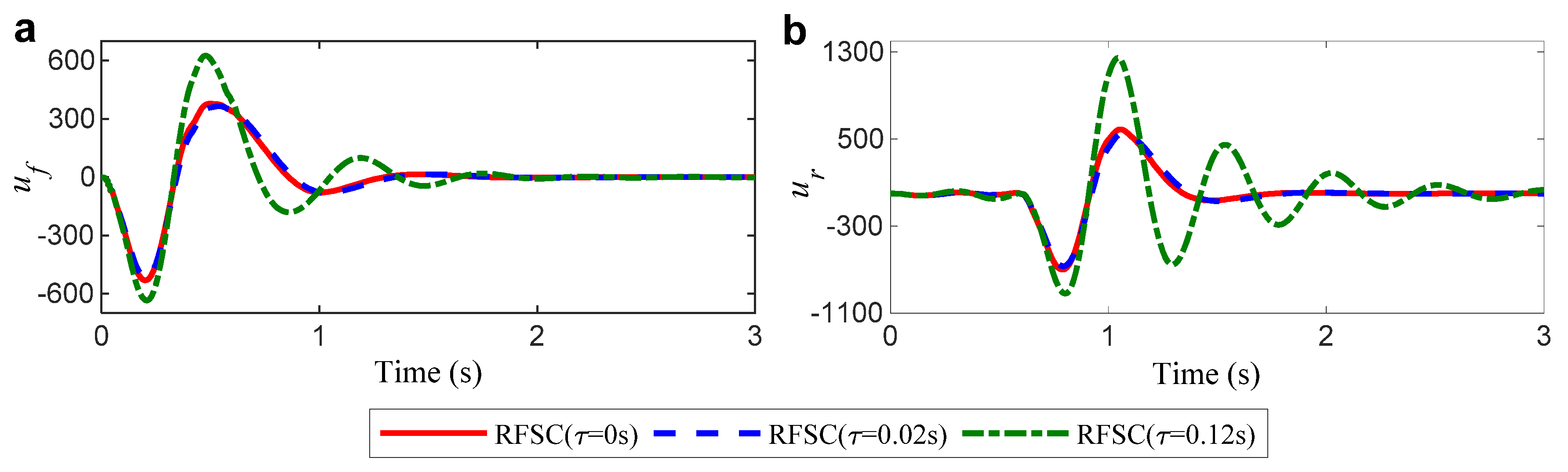
4.2. Bump Road Response in Time Domain
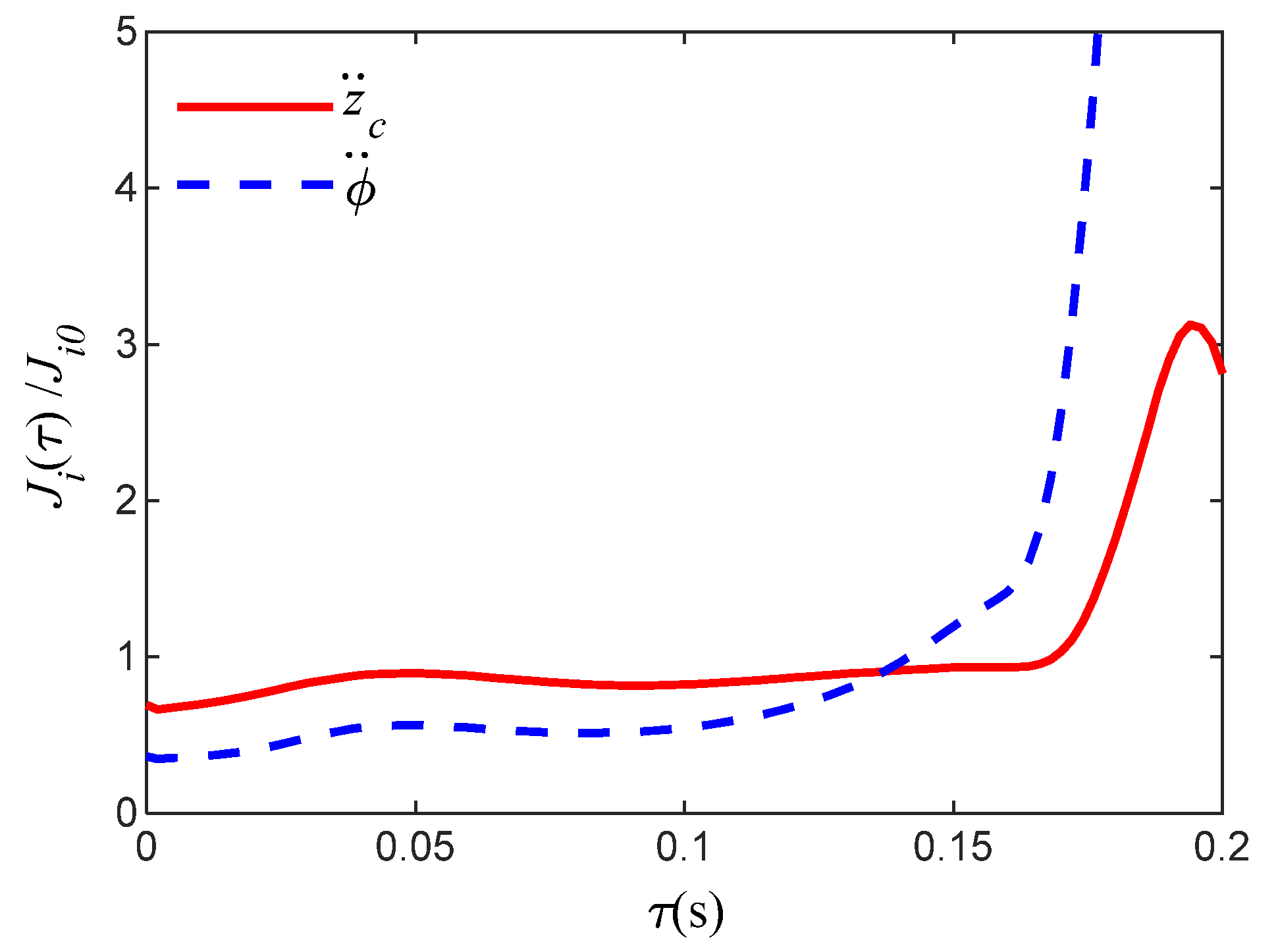
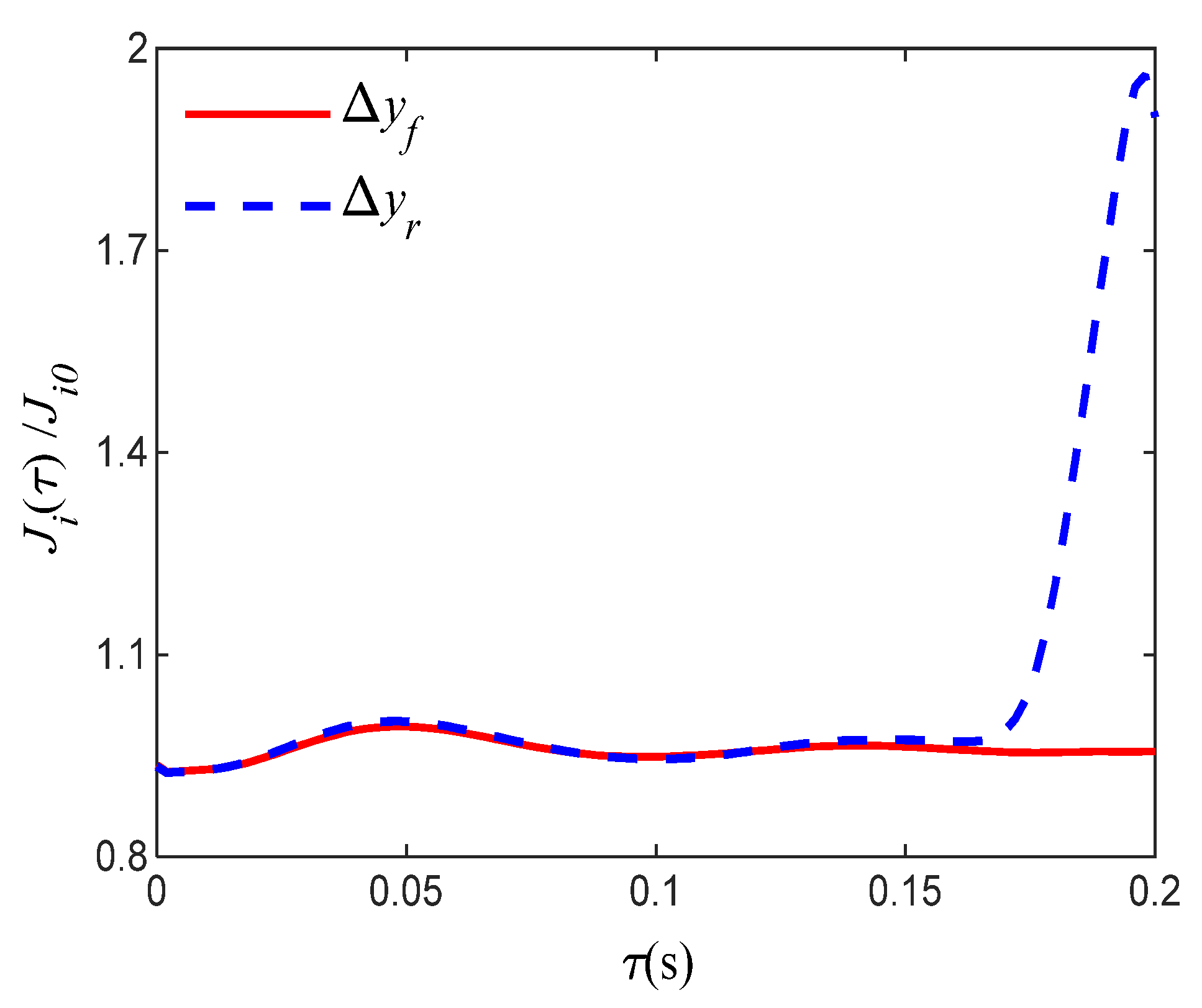
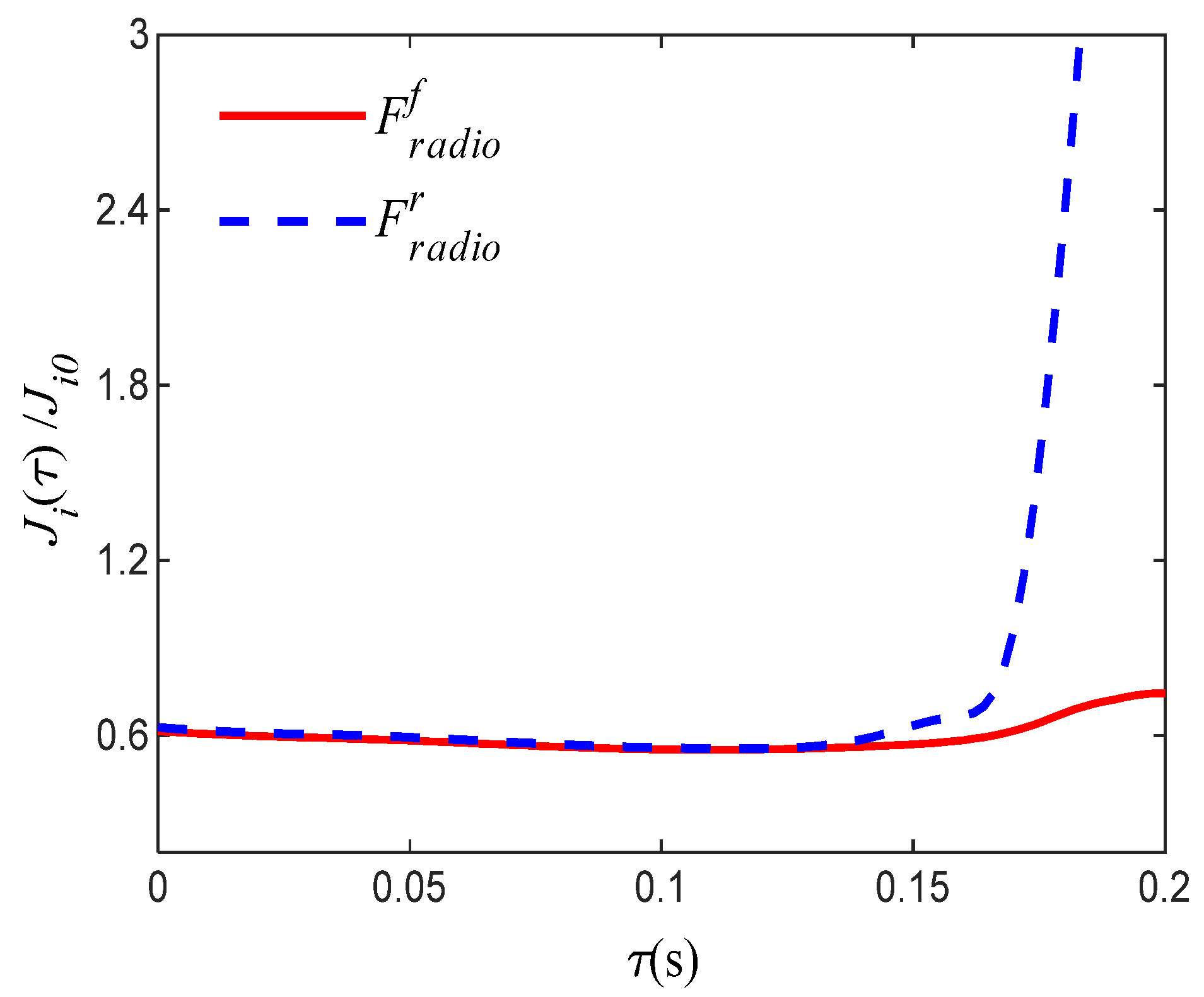
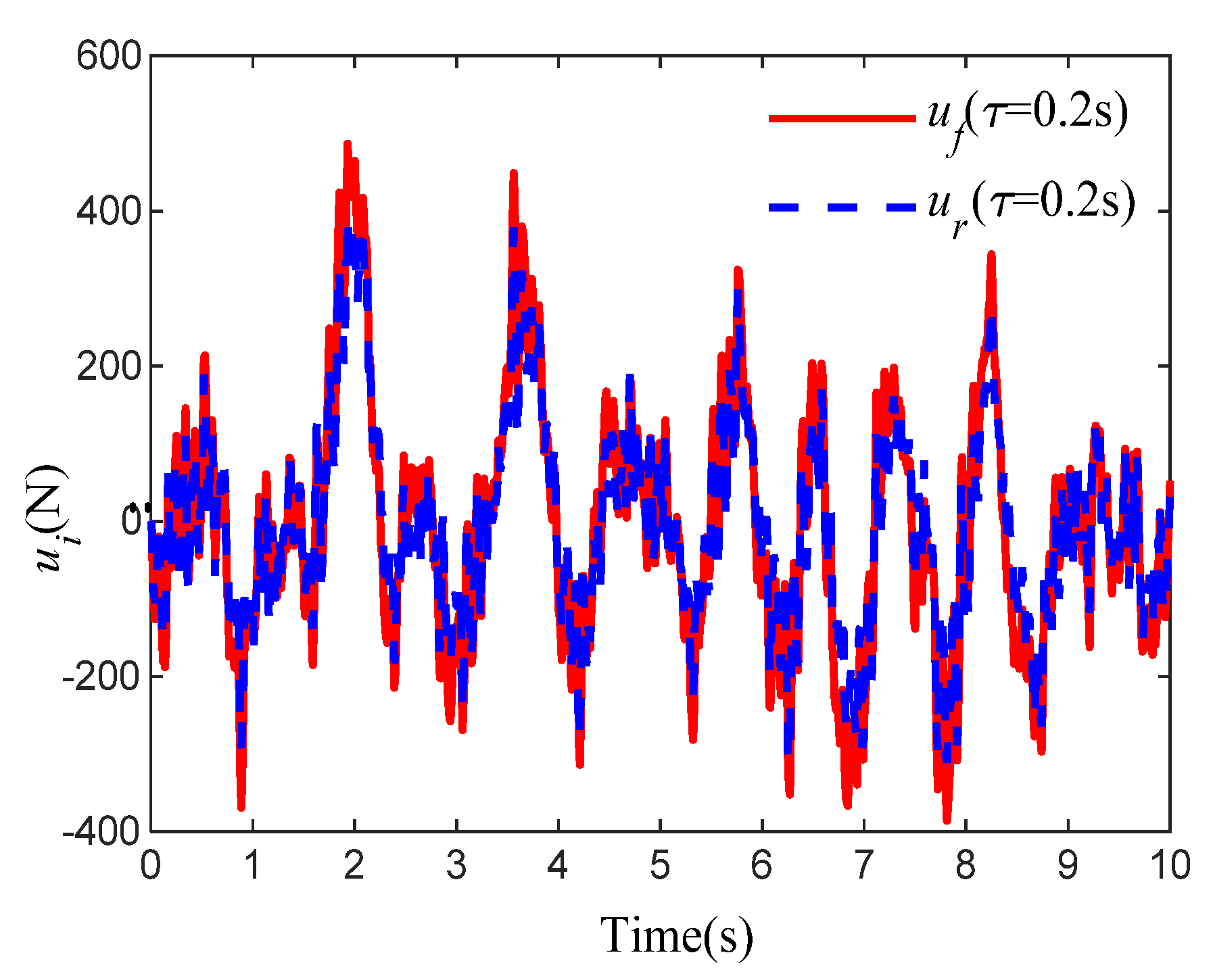
4.3. Random Road Response in Time Domain
5. Conclusions
- (1)
- A half-vehicle active suspension model considering the parameter uncertainties, input delay, as well as the external road surface disturbances is established. the H∞ norm of vehicle body acceleration is selected as the performance index of the controller output. The hard constraints of suspension dynamic deflections, tire dynamic loads and actuator saturations are taken as the generalized H2 performance output index of the designed controller. A robust controller based on cone complementary linearization algorithm is proposed.
- (2)
- The simulation experiments under different road excitations show that the generalized H2/H∞ controller in this paper can tolerate the performance loss and fluctuation caused by the parameters uncertainty and the control input delay. It can not only enhance the ride comfort of vehicles, but also meet the hard constraints of ASS in time domain and frequency domain, respectively.
- (3)
- In the next stage work, the author will consider the effects of time-varying input delay on the control stability and discuss how to design a stable and reliable active fault-tolerant controller when the actuators occur faults or failures.
Author Contributions
Funding
Data Availability
Conflicts of Interest
Appendix A
References
- Sun, W.C.; Gao, H.J.; Kaynak, O. Vibration isolation for active suspensions with performance constraints and actuator saturation. IEEE Trans. Mechatron. 2015, 20, 675–683. [Google Scholar] [CrossRef]
- Zohir, B.L.; Faried, H.; Waleed, F.F. A comparative ride performance of passive, semi-active and active suspension systems for off-road vehicles using half car model. Int. J. Heavy Veh. Syst. 2014, 21, 26–41. [Google Scholar]
- Pang, H.; Zhang, X.; Xu, Z.R. Adaptive backstepping-based tracking control design for nonlinear active suspension system with parameter uncertainties and safety constraints. ISA Trans. 2018, 88, 23–36. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.C.; Pan, H.H.; Zhang, Y.F.; Gao, H.J. Multi-objective control for uncertain nonlinear active suspension systems. IEEE Trans. Mechatron. 2014, 24, 318–327. [Google Scholar] [CrossRef]
- Du, H.P.; Li, W.H.; Zhang, N. Integrated seat and suspension control for a quarter car with driver model. IEEE Trans. Veh. Technol. 2012, 61, 3893–3908. [Google Scholar]
- Sun, W.C.; Gao, H.J.; Kaynak, O. Finite frequency H∞ control for vehicle active suspension systems. IEEE Trans. Contr. Syst. Technol. 2011, 19, 416–422. [Google Scholar] [CrossRef]
- Zapateiro, M.; Luo, N.; Karimi, H.R. Vibration control of a class of semiactive suspension system using neural network and backstepping techniques. Mech. Syst. Signal Process. 2009, 23, 1946–1953. [Google Scholar] [CrossRef]
- Zapateiro, M.; Karimi, H.R.; Luo, N. Real-time hybrid testing of semiactive control strategies for vibration reduction in a structure with MR damper. Struct. Control Health Monit. 2010, 17, 427–451. [Google Scholar] [CrossRef]
- Zong, L.H.; Gong, X.L.; Xuan, S.H. Semi-active H∞ control of high-speed railway vehicle suspension with magnetorheological dampers. Veh. Syst. Dyn. 2013, 51, 600–626. [Google Scholar] [CrossRef]
- Du, H.P.; Sze, K.Y.; Lam, J. Semi-active H∞ control of vehicle suspension with magneto-rheological dampers. J. Sound Vib. 2005, 283, 981–996. [Google Scholar] [CrossRef]
- Wang, T.C.; Li, G. Adaptive Critic Optimal Fuzzy Control for Quarter-car Suspension Systems. In Proceedings of the 5th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS), Hangzhou, China, 16–19 August 2018; pp. 440–444. [Google Scholar]
- Ye, D.; Yang, G.H. Adaptive Fault-Tolerant Tracking Control Against Actuator Faults With Application to Flight Control. IEEE Trans. Control Syst. Technol. 2006, 14, 1088–1096. [Google Scholar] [CrossRef]
- Yang, G.H.; Ye, D. Reliable Control of Linear Systems with Adaptive Mechanism. IEEE Trans. Automat. Control 2010, 55, 242–247. [Google Scholar] [CrossRef]
- Prabakar, R.S.; Sujatha, C.; Narayanan, S. Optimal semi-active preview control response of a half car vehicle model with magnetorheological damper. J. Sound Vib. 2009, 32, 6400–6420. [Google Scholar] [CrossRef]
- Chadli, M.; Rabhi, A.; Hajjaji, A.E. Observer-based H∞ fuzzy control for vehicle active suspension. In Proceedings of the 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; 13, pp. 1393–1398. [Google Scholar]
- Pang, H.; Yang, J.J.; Liang, J. On Enhanced Fuzzy Sliding-Mode Controller and Its Chattering Suppression for Vehicle Semi-Active Suspension System. In Proceedings of the 2018 World Congress Experience, Detroit, MI, USA, 3 April 2018. [Google Scholar]
- Meng, Q.; Zhang, T.; Gao, X.; Song, J.Y. Adaptive Sliding Mode Fault-Tolerant Control of the Uncertain Stewart Platform Based on Offline Multibody Dynamics. IEEE Trans. Mechatron. 2014, 19, 882–894. [Google Scholar] [CrossRef]
- Liu, S.; Zhou, H.; Luo, X.; Jing, X. Adaptive sliding fault tolerant control for nonlinear uncertain active suspension systems. J. Frankl. Inst. 2015, 353, 180–199. [Google Scholar] [CrossRef]
- Han, Z.G.; Zhang, K.; Liu, H.P. Actuator fault reconstruction based on a robust adaptive observer. IET Control Theory Appl. 2018, 12, 2076–2087. [Google Scholar] [CrossRef]
- Demir, O.; Keskin, I.; Cetin, S. Modeling and control of a nonlinear half-vehicle suspension system: A hybrid fuzzy logic approach. Nonlinear Dyn. 2011, 67, 2139–2151. [Google Scholar] [CrossRef]
- Pang, H.; Liu, F.; Zhang, X. Variable universe fuzzy control for vehicle semi-active suspension system with MR damper combining fuzzy neural network and particle swarm optimization. Neurocomputing 2018, 306, 130–140. [Google Scholar] [CrossRef]
- Ríos, H.; Kamal, S.; Fridman, L.M.; Zolghadri, A. Fault tolerant control allocation via continuous integral sliding-modes: A HOSM-Observer approach. Automatica 2015, 51, 318–325. [Google Scholar] [CrossRef]
- Jia, Q.; Chen, W.; Zhang, W.; Chen, X. Robust fault reconstruction via learning observers in linear parameter-varying systems subject to loss of actuator effectiveness. IET Control Theory Appl. 2014, 8, 42–50. [Google Scholar] [CrossRef]
- Choi, H.D.; Ahn, C.K.; Shi, P.; Wu, L.G.; Lim, M.T. Dynamic output-feedback dissipative control for T-S fuzzy systems with time-varying input delay and output constraints. IEEE Trans. Fuzzy Syst. 2017, 25, 511–526. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ms | Iy | muf | mur |
|---|---|---|---|
| 500 kg | 1222 kg·m2 | 36 kg | 36 kg |
| a | b | kr | kf |
| 1.5 m | 2.5 m | 26,000 N−1 | 16,000 N·m−1 |
| ktr | ktf | cf | cr |
| 16,000 N·m−1 | 160,000 N·m−1 | 980N·s·m−1 | 980 N·s·m−1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Pang, H.; Yao, R. Robust Mixed H2/H∞ State Feedback Controller Development for Uncertain Automobile Suspensions with Input Delay. Processes 2020, 8, 359. https://doi.org/10.3390/pr8030359
Liu N, Pang H, Yao R. Robust Mixed H2/H∞ State Feedback Controller Development for Uncertain Automobile Suspensions with Input Delay. Processes. 2020; 8(3):359. https://doi.org/10.3390/pr8030359
Chicago/Turabian StyleLiu, Nan, Hui Pang, and Rui Yao. 2020. "Robust Mixed H2/H∞ State Feedback Controller Development for Uncertain Automobile Suspensions with Input Delay" Processes 8, no. 3: 359. https://doi.org/10.3390/pr8030359
APA StyleLiu, N., Pang, H., & Yao, R. (2020). Robust Mixed H2/H∞ State Feedback Controller Development for Uncertain Automobile Suspensions with Input Delay. Processes, 8(3), 359. https://doi.org/10.3390/pr8030359