Triple-Mode Model Predictive Control Using Future Target Information



Abstract
1. Introduction
2. Preliminary
Dynamic Matrix Control Algorithm
3. Main Results
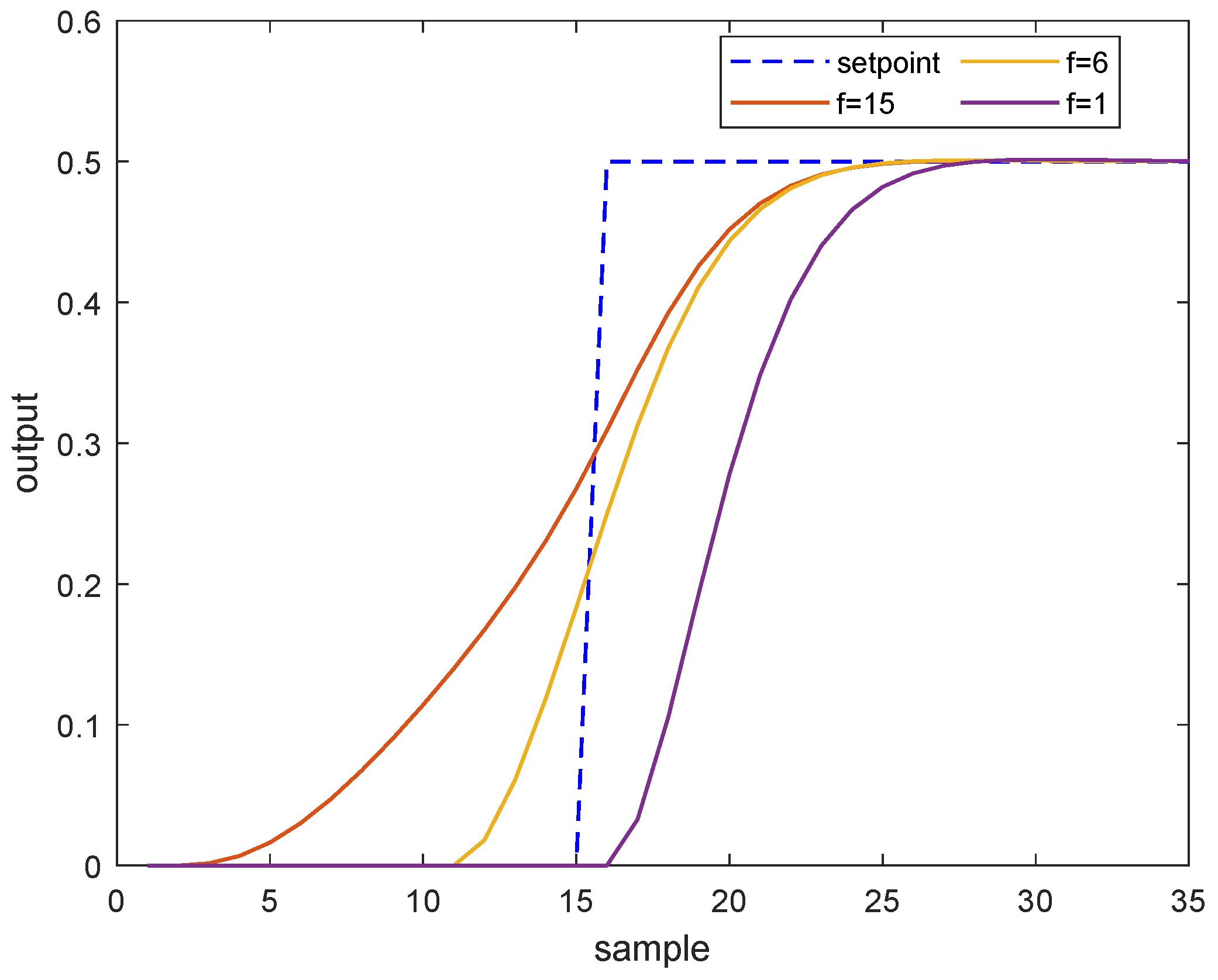
3.1. Illustrations of Poor Future Trajectory Horizon
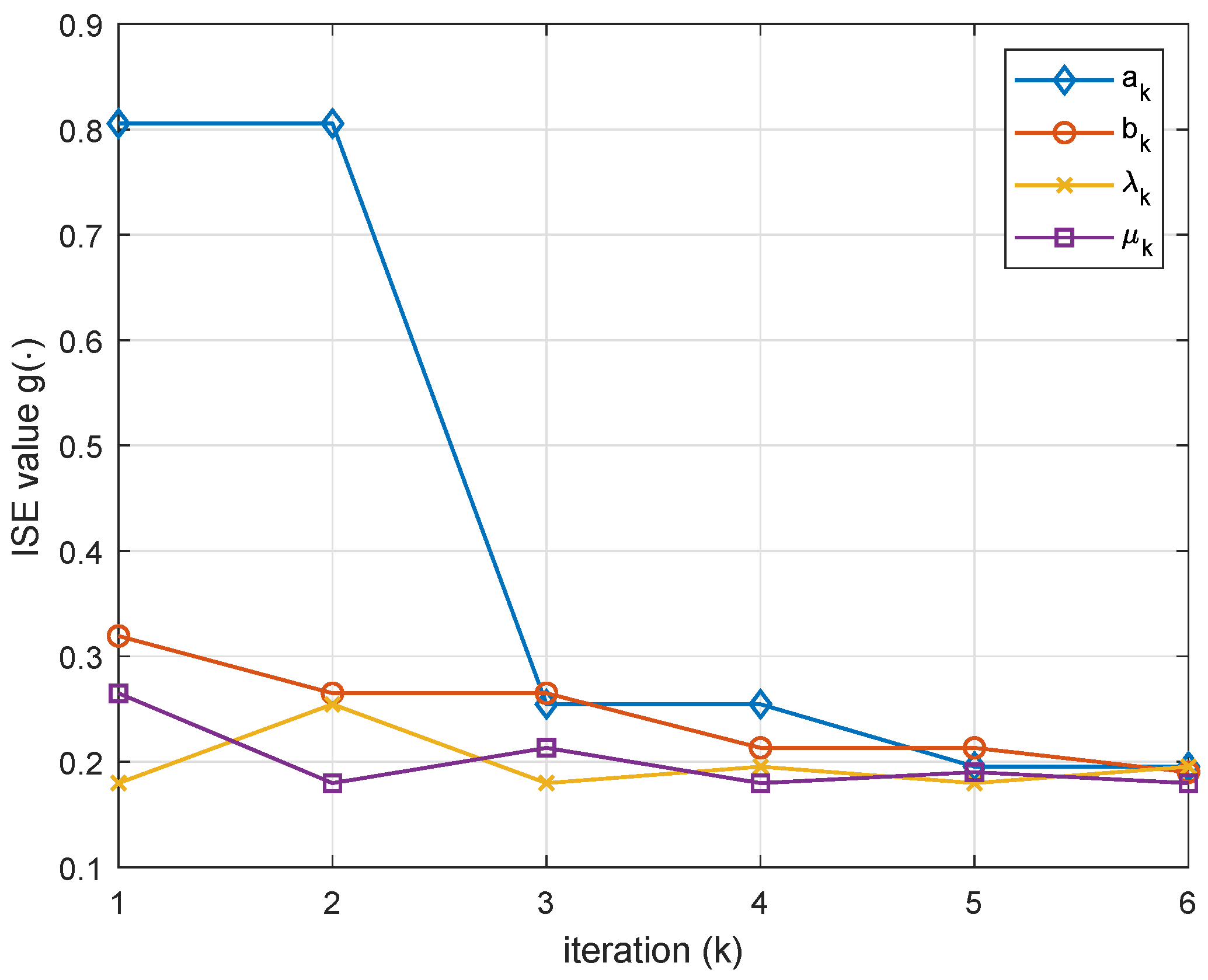
3.2. Future Trajectory Horizon Optimization Algorithm
| Algorithm 1: The optimization of Future trajectory horizon based on ISE value |
|
3.3. Triple-Mode MPC Algorithm Using Future Target Information
| Algorithm 2: Triple-mode MPC algorithm using future target information |
|
4. Applications
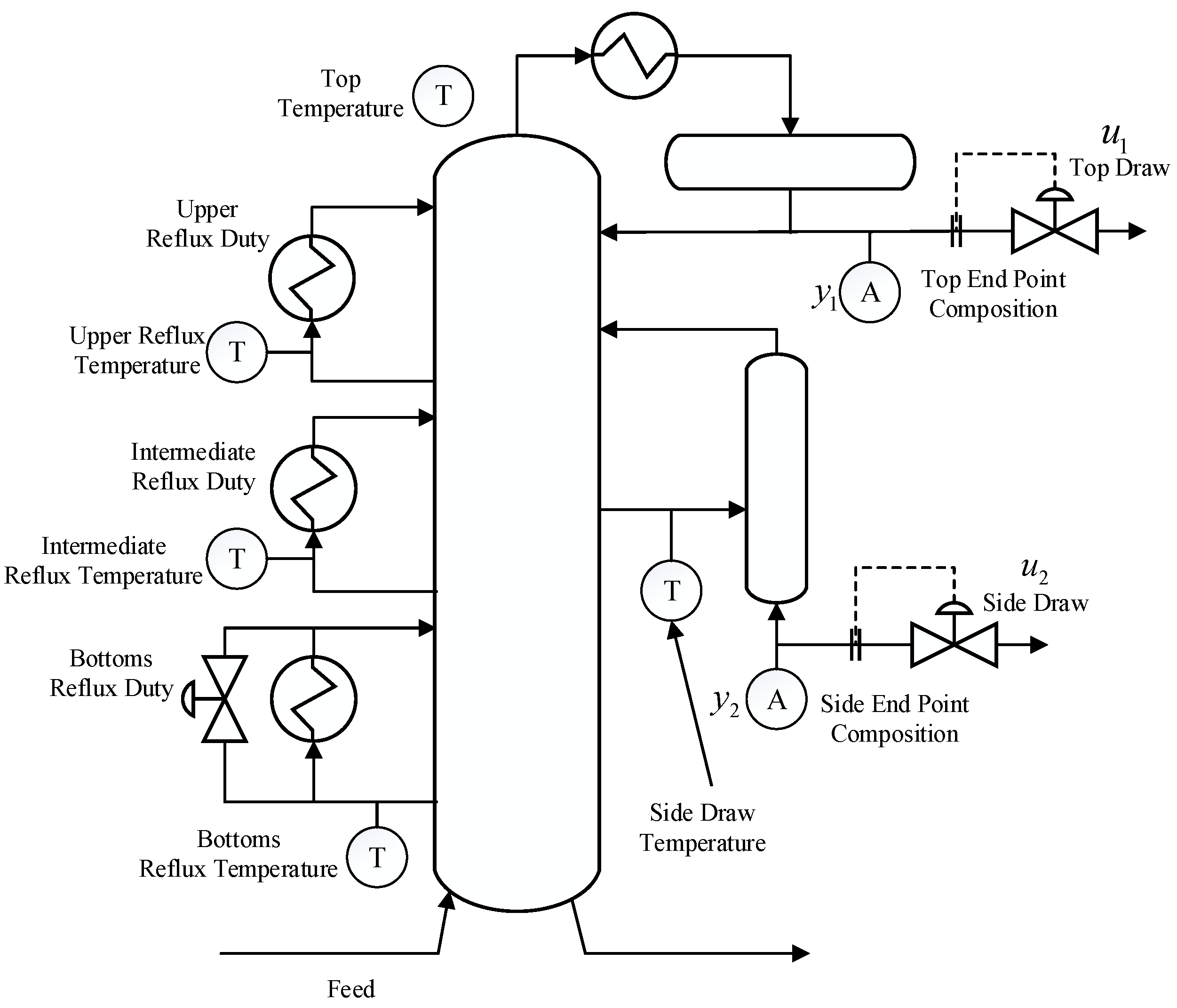
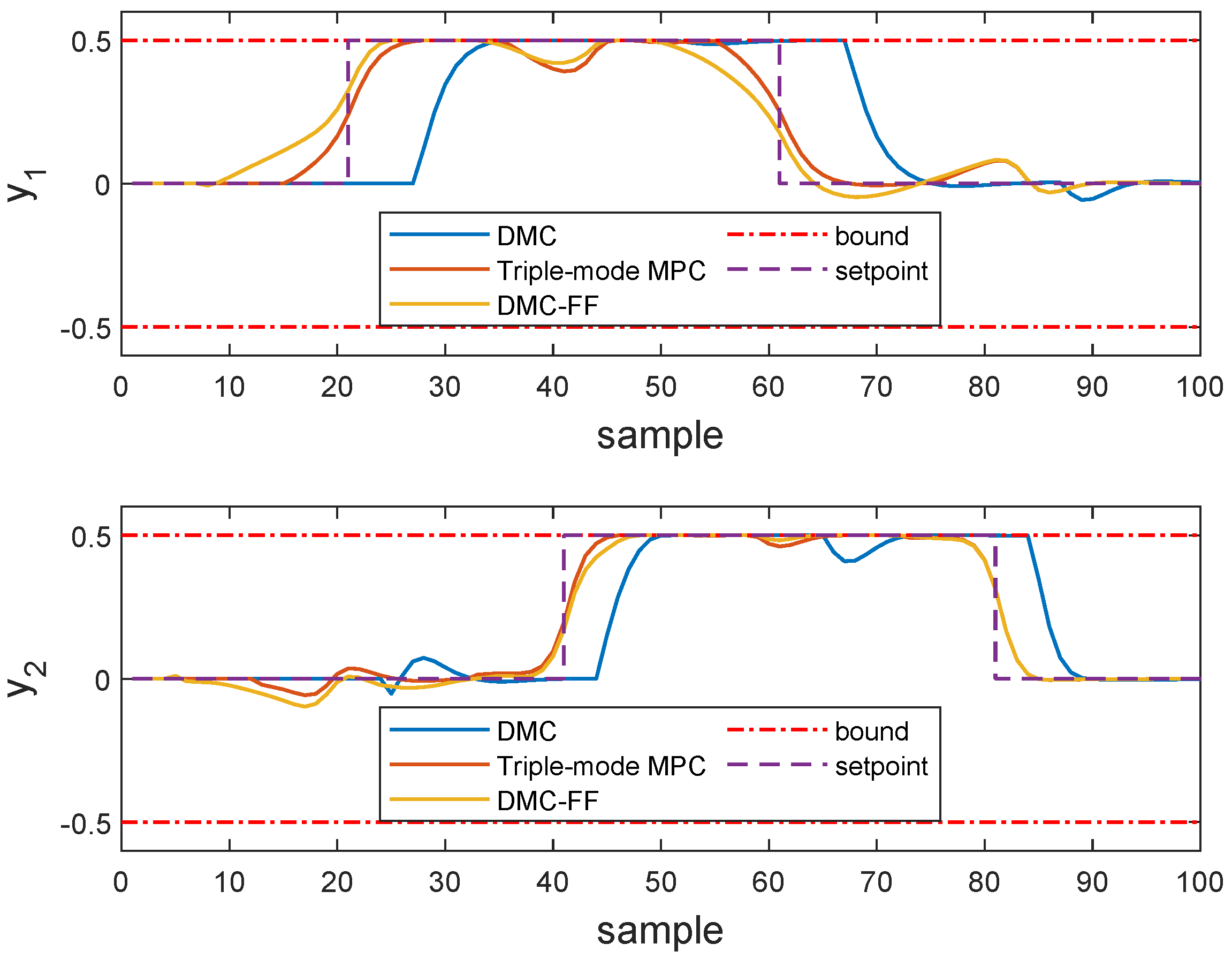
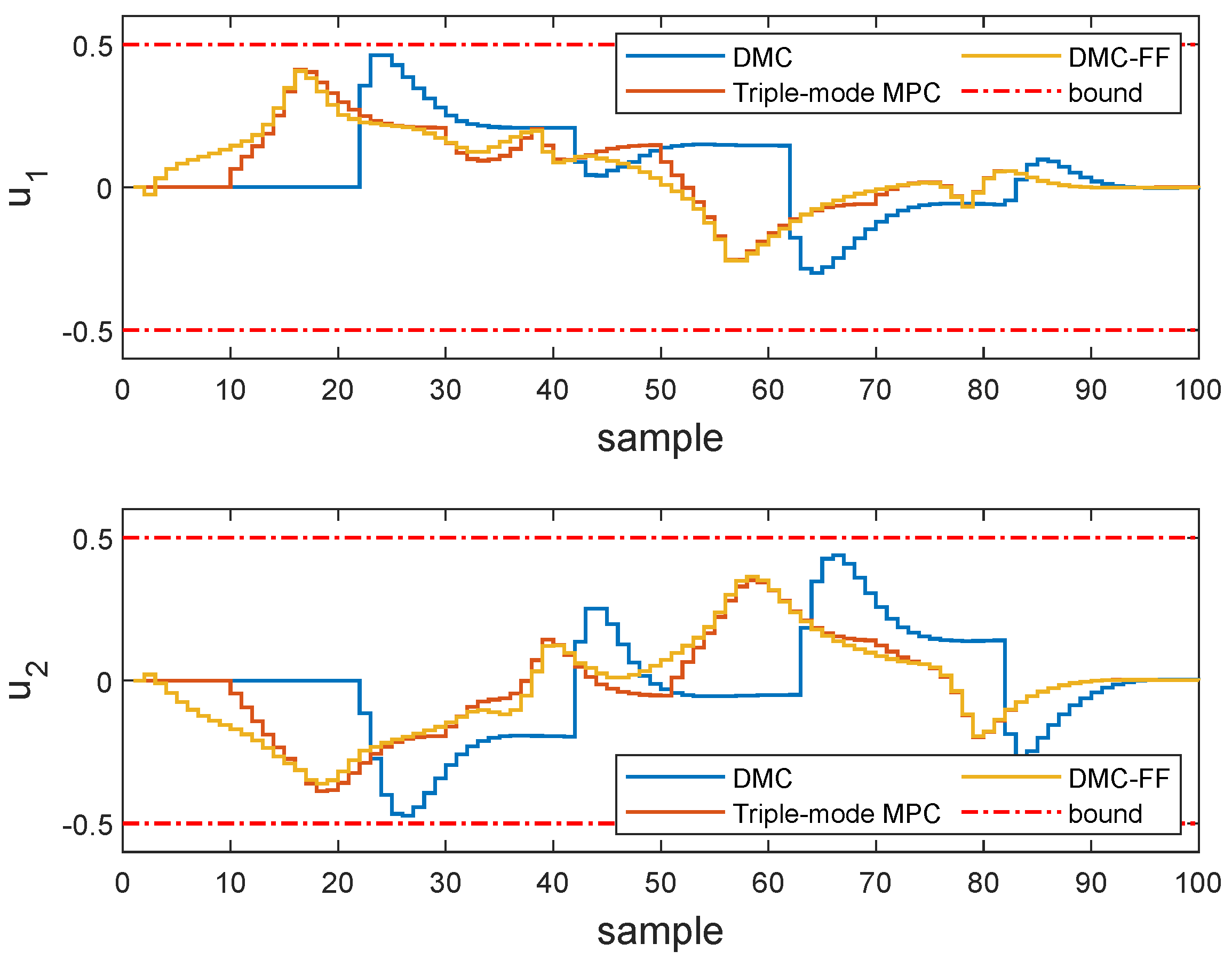
4.1. System I: A Heavy Oil Fractionator
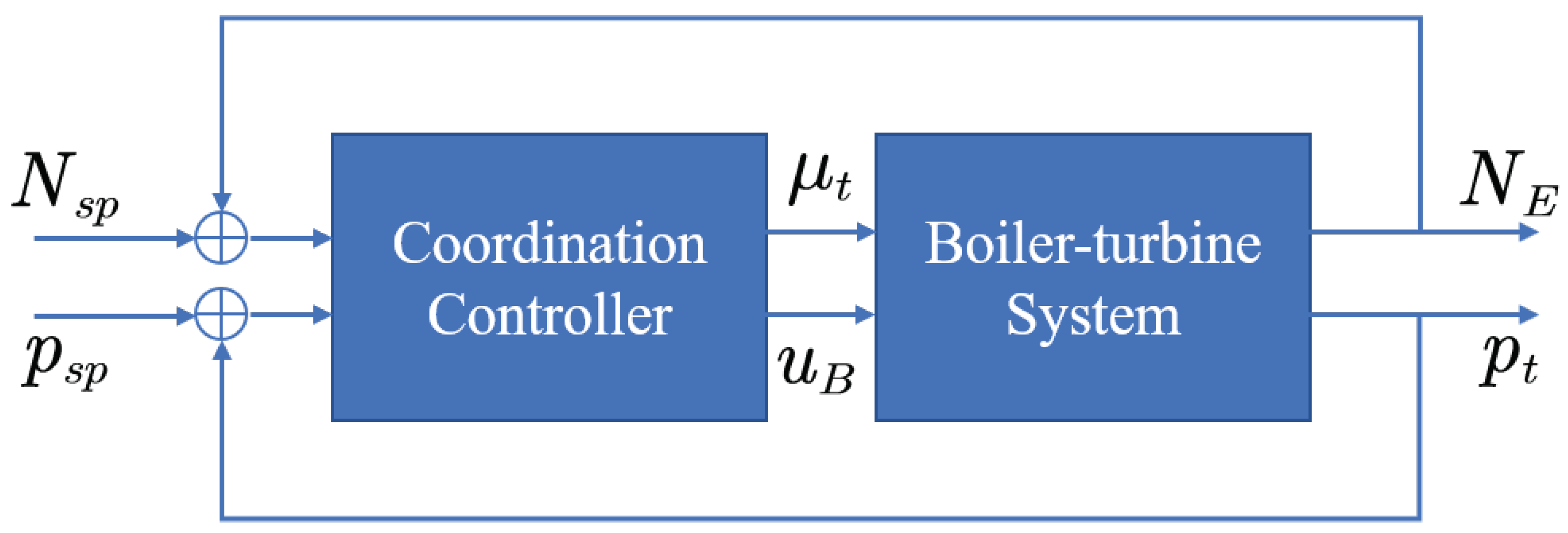
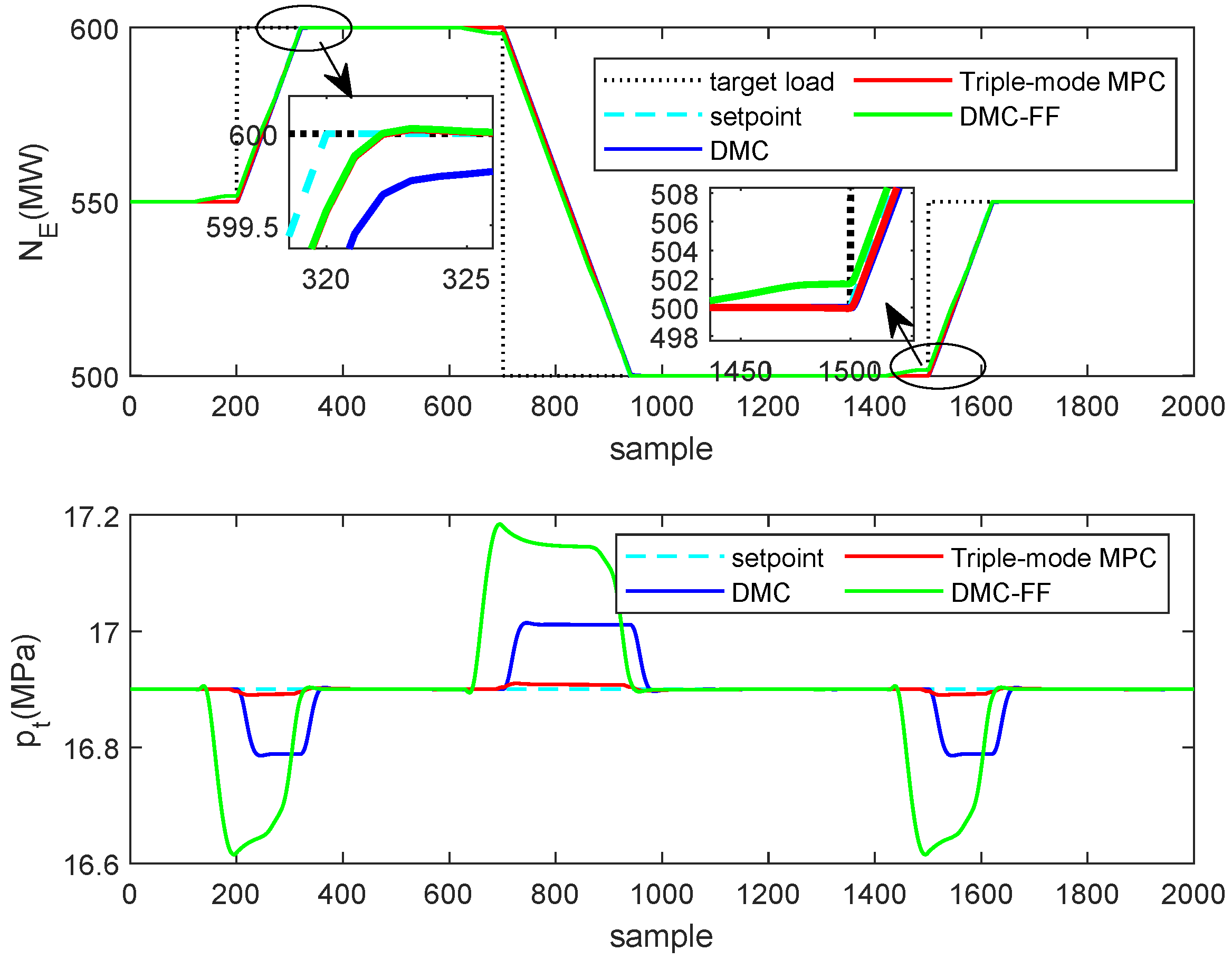
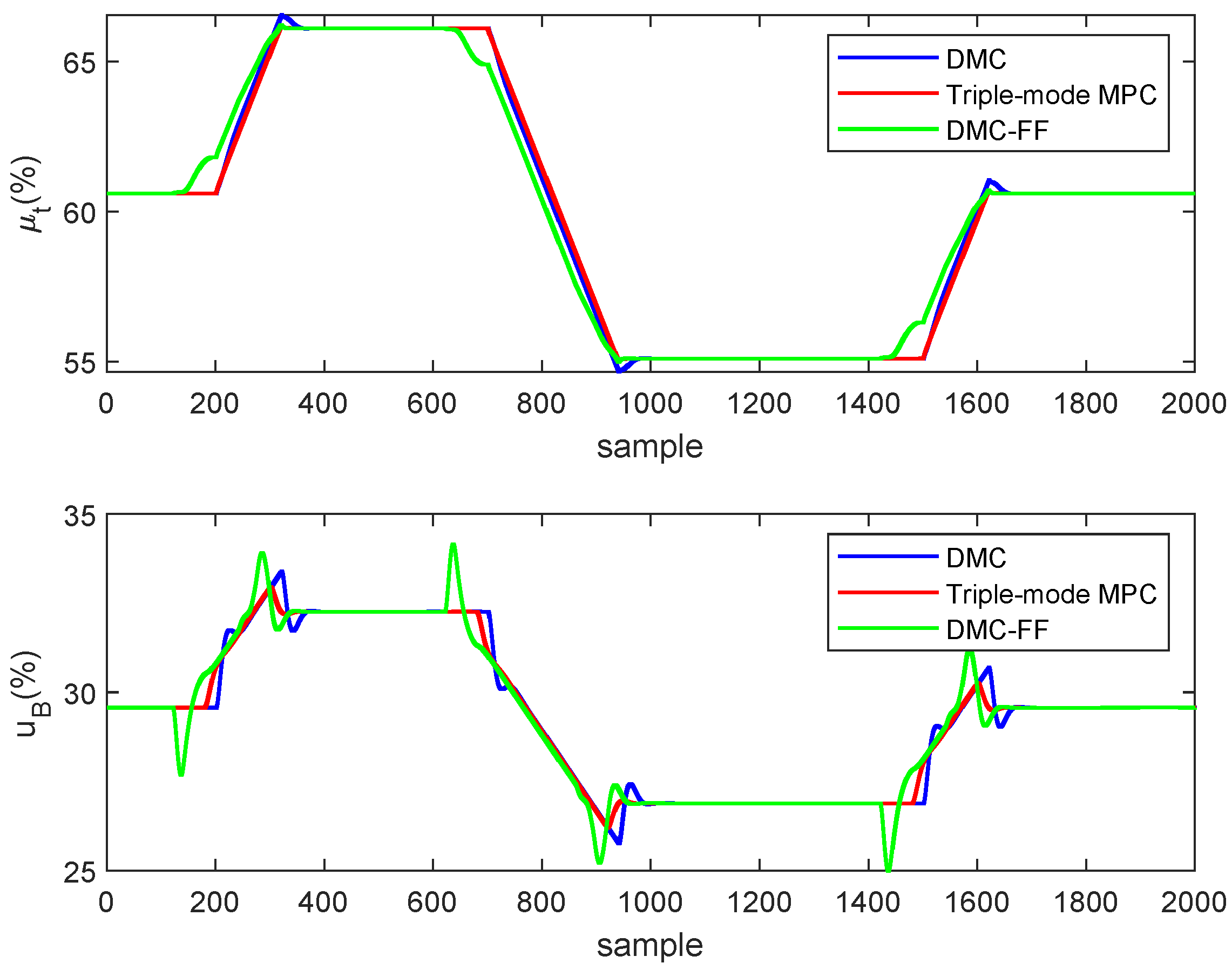
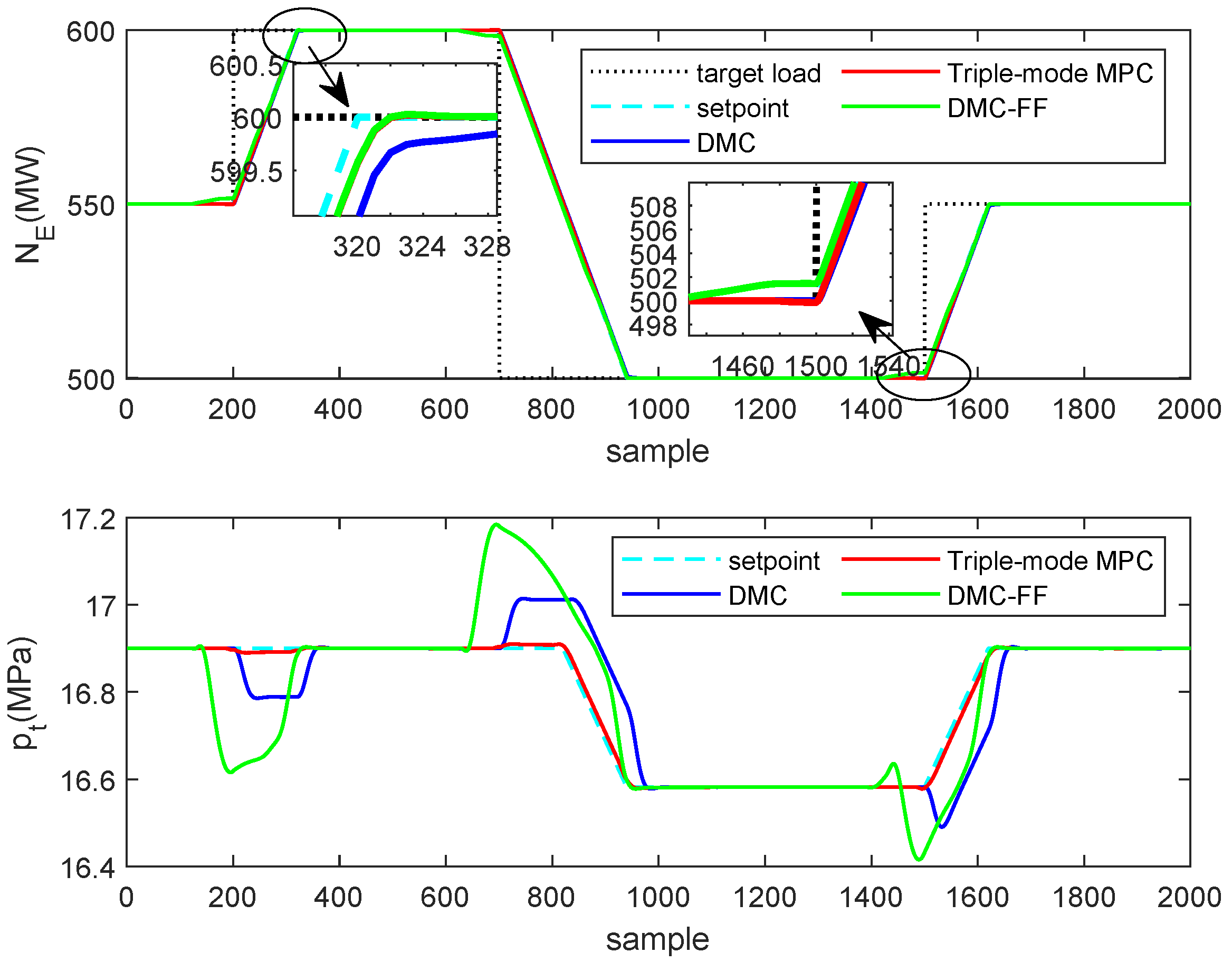
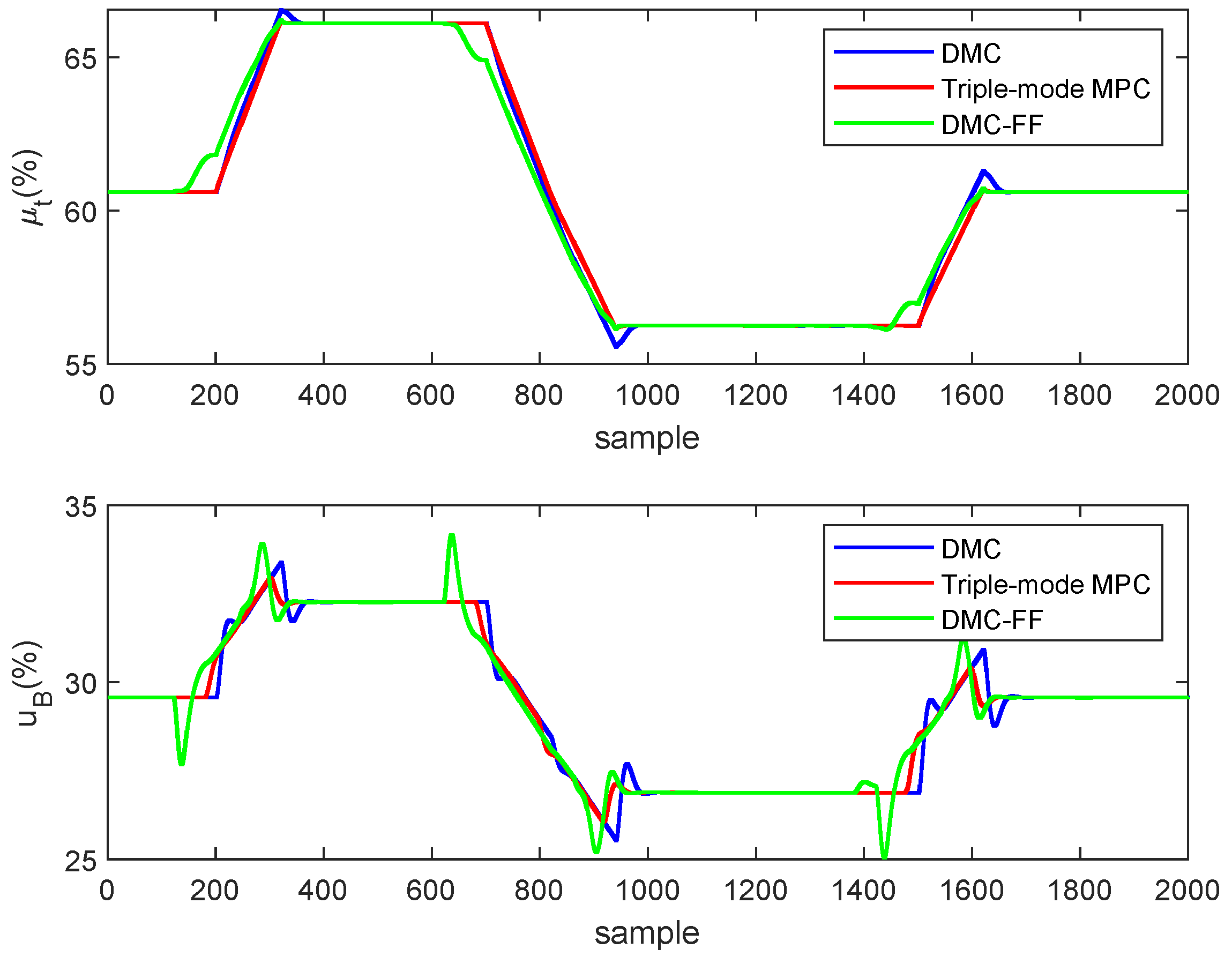
4.2. System II: A Power Plant Coordinated Control System
4.2.1. Constant Pressure Operation
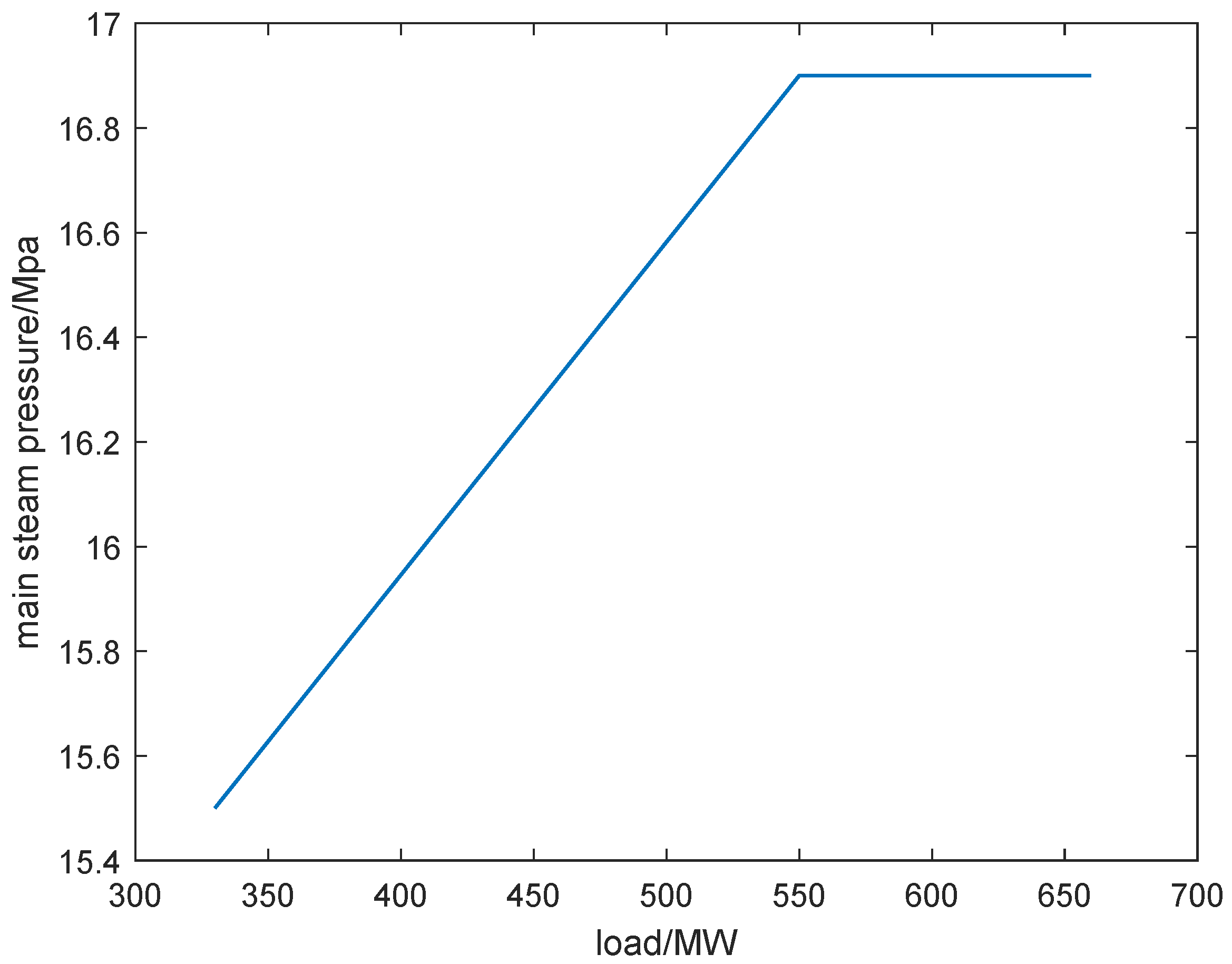
4.2.2. Sliding Pressure Operation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of Theorem 1
References
- Qin, S.J.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Garcia, C.E.; Morshedi, A. Quadratic programming solution of dynamic matrix control (QDMC). Chem. Eng. Commun. 1986, 46, 73–87. [Google Scholar] [CrossRef]
- Rawlings, J.B. Tutorial overview of model predictive control. IEEE Control Syst. Mag. 2000, 20, 38–52. [Google Scholar]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design; Nob Hill Pub.: San Francisco, CA, USA, 2009. [Google Scholar]
- Maciejowski, J.M. Predictive Control: With Constraints; Pearson Education: London, UK, 2002. [Google Scholar]
- Goodwin, G.; Seron, M.M.; De Doná, J.A. Constrained Control and Estimation: An Optimisation Approach; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Zhang, K.; Zhao, J.; Zhu, Y. MPC case study on a selective catalytic reduction in a power plant. J. Process Control 2018, 62, 1–10. [Google Scholar] [CrossRef]
- Di Carlo, J.; Wensing, P.M.; Katz, B.; Bledt, G.; Kim, S. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Limón, D.; Alvarado, I.; Alamo, T.; Camacho, E.F. MPC for tracking piecewise constant references for constrained linear systems. Automatica 2008, 44, 2382–2387. [Google Scholar] [CrossRef]
- Clarke, D.W.; Mohtadi, C. Properties of generalized predictive control. Automatica 1989, 25, 859–875. [Google Scholar] [CrossRef]
- Middleton, R.H.; Chen, J.; Freudenberg, J.S. Tracking sensitivity and achievable performance in preview control. Automatica 2004, 40, 1297–1306. [Google Scholar] [CrossRef]
- Carrasco, D.S.; Goodwin, G.C. Feedforward model predictive control. Annu. Rev. Control 2011, 35, 199–206. [Google Scholar] [CrossRef]
- Rossiter, J.; Grinnell, B. Improving the tracking of generalized predictive control controllers. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 1996, 210, 169–182. [Google Scholar] [CrossRef]
- Dughman, S.; Rossiter, J. Systematic and effective embedding of feedforward of target information into MPC. Int. J. Control 2017, 1–15. [Google Scholar] [CrossRef]
- Valencia-Palomo, G.; Rossiter, J.; López-Estrada, F. Improving the feed-forward compensator in predictive control for setpoint tracking. ISA Trans. 2014, 53, 755–766. [Google Scholar] [CrossRef] [PubMed]
- Qin, S.J.; Badgwell, T.A. An Overview of Industrial Model Predictive Control Technology; AIChE Symposium Series; American Institute of Chemical Engineers: New York, NY, USA, 1997; Volume 93, pp. 232–256. [Google Scholar]
- Kiefer, J. Sequential minimax search for a maximum. Proc. Am. Math. Soc. 1953, 4, 502–506. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Prett, D.M.; Morari, M. The Shell Process Control Workshop; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Moon, U.C.; Lee, Y.; Lee, K.Y. Practical dynamic matrix control for thermal power plant coordinated control. Control Eng. Pract. 2018, 71, 154–163. [Google Scholar] [CrossRef]
- Jizhen, L.; Liang, T.; Deliang, Z.; Xinping, L. Analysis on the Nonlinearity of Load-Pressure Characteristics of a 660MW Unit. Power Eng. 2005, 25, 533–536. [Google Scholar]
- Wood, A.J.; Wollenberg, B.F.; Sheblé, G.B. Power Generation, Operation, and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Flynn, D. Thermal Power Plant Simulation and Control; Number 43; IET: London, UK, 2003. [Google Scholar]
- Green, J.; Quest, J. A short history of the European Transonic Wind Tunnel ETW. Prog. Aerosp. Sci. 2011, 47, 319–368. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ISE | 0.8055 | 0.1797 | 0.3192 |
| DMC | Triple-Mode MPC | DMC-FF | |
|---|---|---|---|
| ISE | 6.3771 | 0.7088 | 0.9515 |
| Error of (MW) | Error of (MPa) | |
|---|---|---|
| DMC | 431.7057 | 5.6357 |
| Triple-mode MPC | 104.3930 | 0.0331 |
| DMC-FF | 877.6251 | 32.3255 |
| Error of (MW) | Error of (MPa) | |
|---|---|---|
| DMC | 501.7570 | 10.7935 |
| Triple-mode MPC | 124.5650 | 0.1009 |
| DMC-FF | 753.2611 | 22.1475 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Xu, Z.; Zhao, J. Triple-Mode Model Predictive Control Using Future Target Information. Processes 2020, 8, 54. https://doi.org/10.3390/pr8010054
Chen M, Xu Z, Zhao J. Triple-Mode Model Predictive Control Using Future Target Information. Processes. 2020; 8(1):54. https://doi.org/10.3390/pr8010054
Chicago/Turabian StyleChen, Minghao, Zuhua Xu, and Jun Zhao. 2020. "Triple-Mode Model Predictive Control Using Future Target Information" Processes 8, no. 1: 54. https://doi.org/10.3390/pr8010054
APA StyleChen, M., Xu, Z., & Zhao, J. (2020). Triple-Mode Model Predictive Control Using Future Target Information. Processes, 8(1), 54. https://doi.org/10.3390/pr8010054