PEM Fuel Cell Voltage Neural Control Based on Hydrogen Pressure Regulation

 , and
, and 
Abstract
:1. Introduction
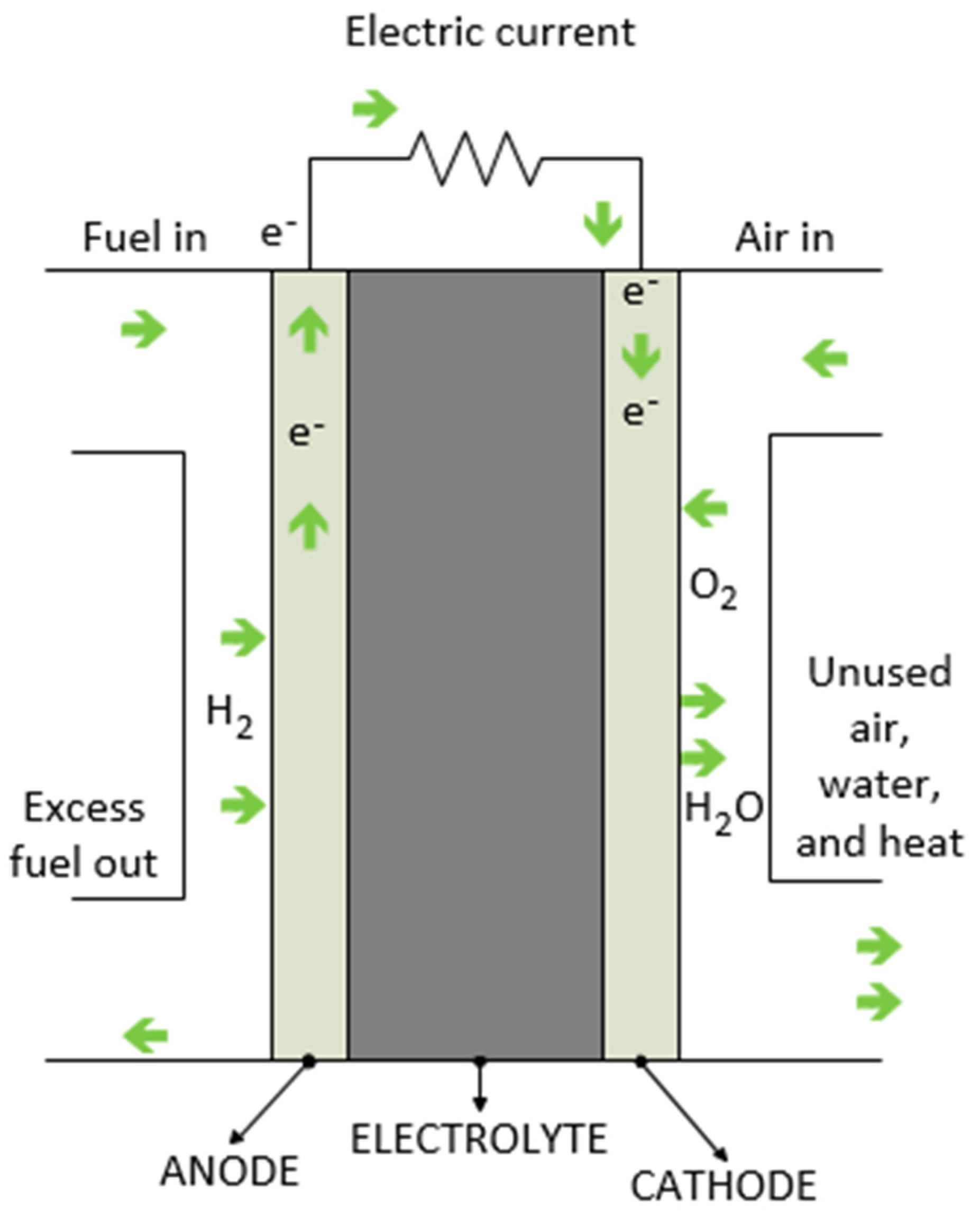
1.1. Fuel Cell Operation Principles
1.2. PEM Fuel Cell System Control
- Reactant Flow Subsystem
- Temperature Subsystem
- Water Management Subsystem
- Power Management Subsystem
2. Related Works
3. Materials and Methods
- Apply a feature selection algorithm to determine the variables needed to model and control the fuel cell voltage;
- Define the system inputs from the subset formed by the feature selection algorithm and try different regression algorithms to predict the output variable;
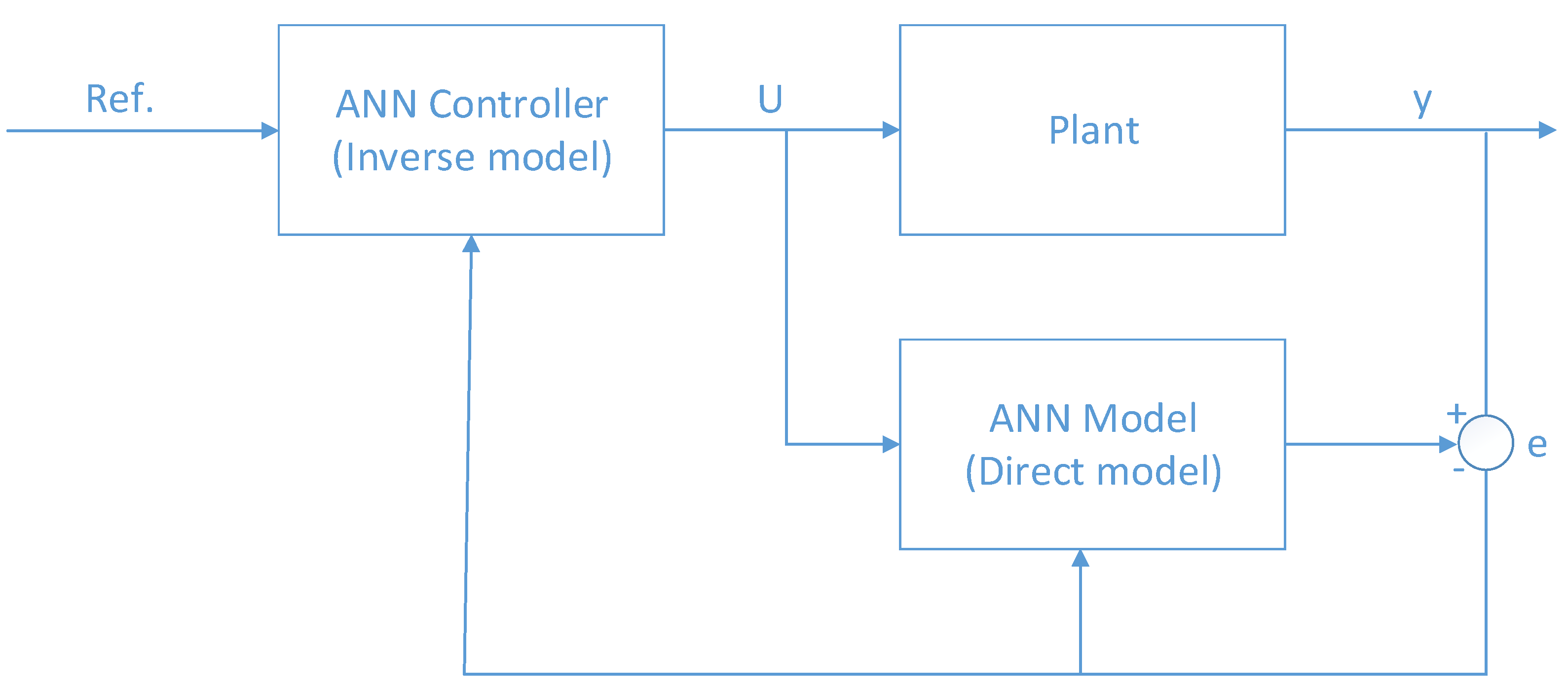
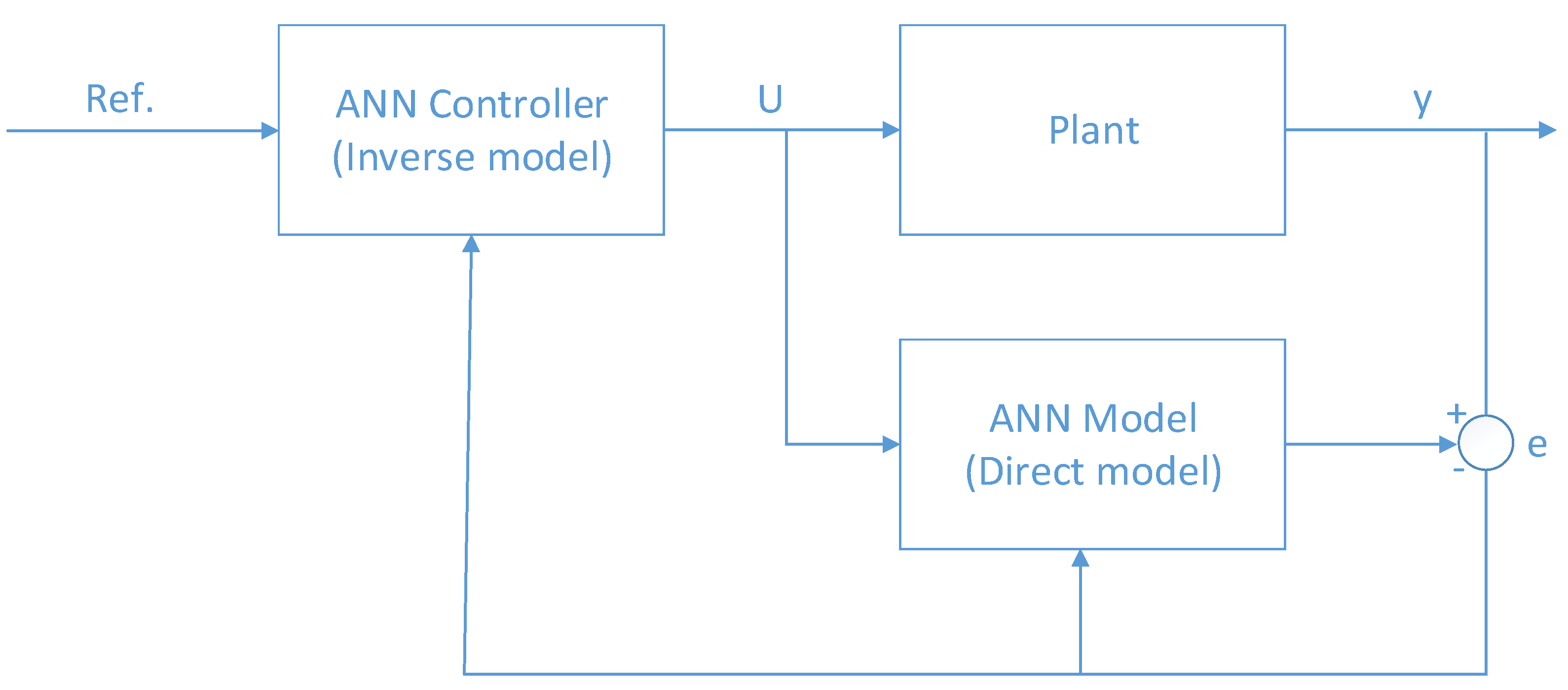
- Develop the inverse model of the fuel cell, turning the system inputs into outputs. The output of the regression model will become a system input.
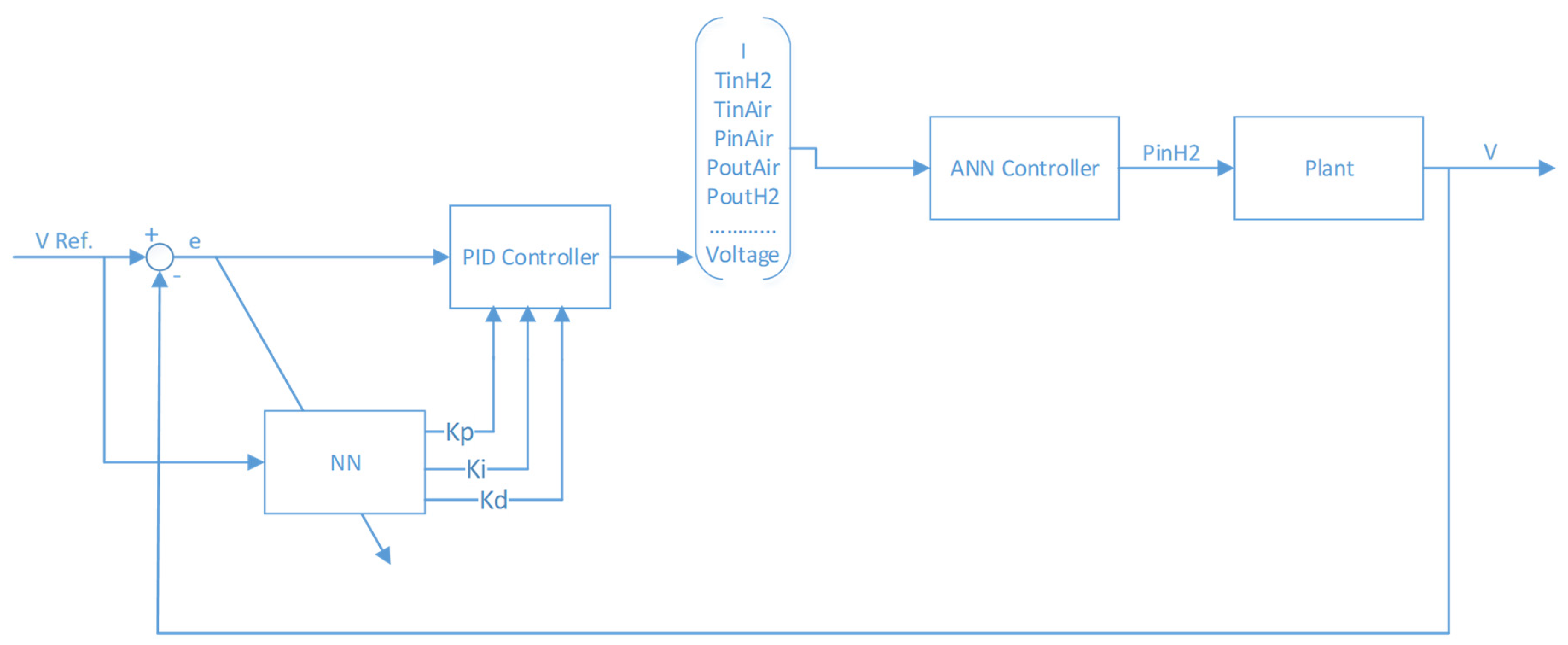
- Integrate the inverse model with a PID neuro control to track the errors and tune the control signal to achieve the reference value of the system output. The reason why these two types of control are integrated is to modify the control signal by not only considering the error between the output variable and the reference value but also considering the state of the other variables in the transient state.
3.1. Experimental Setup
3.2. Feature Selection Algorithms and Data-Driven Models for Fuel Cells
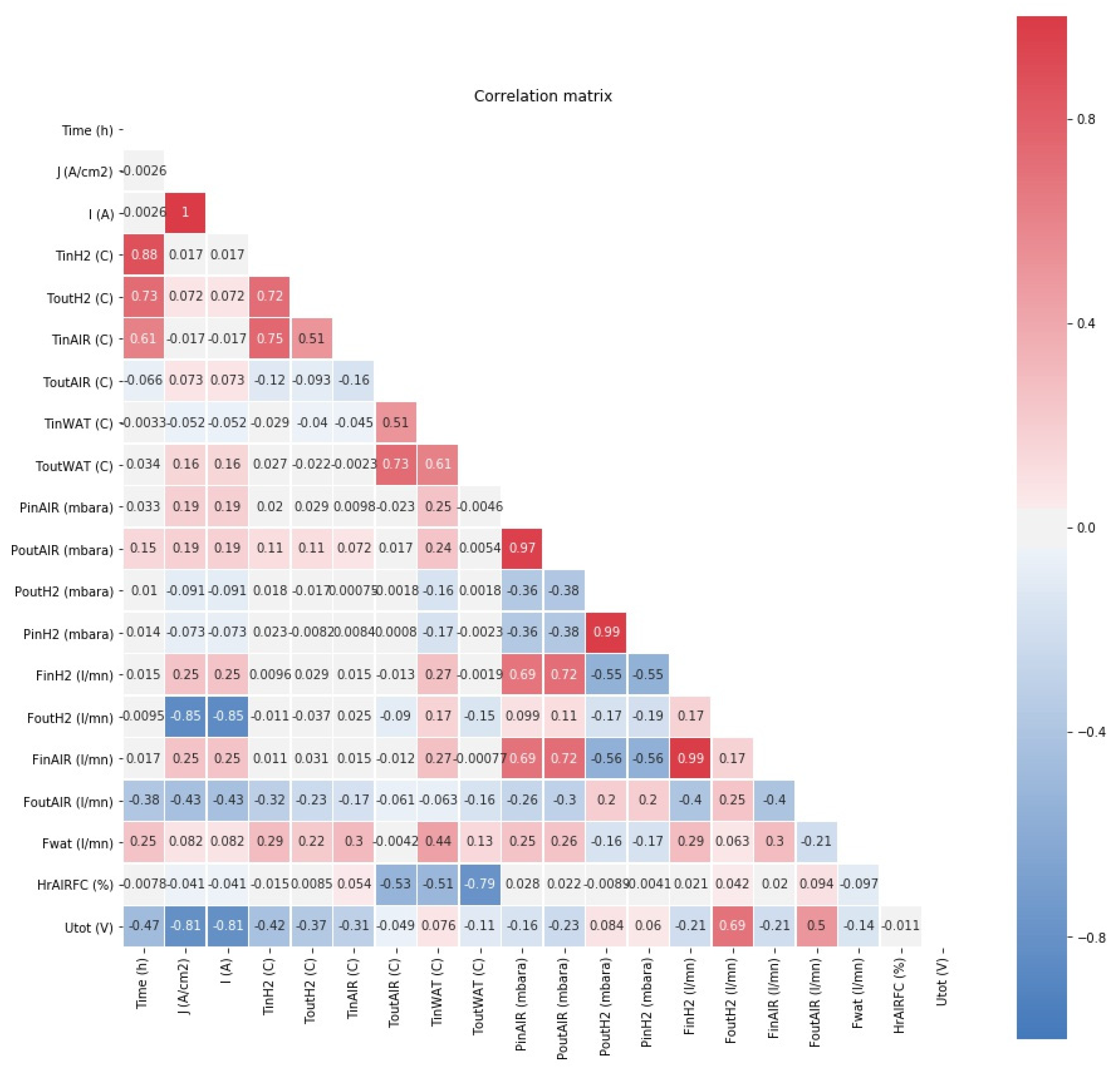
- Filter methods measure the relevance of the variables by their correlations with the output variable;
- Wrapper methods create a subset of the original dataset using a training algorithm;
- Filter methods are much faster than wrapper and embedded methods;
- Wrapper methods can fall into overfitting;
- Embedded and wrapper methods capture feature dependencies while filters methods do not.
4. Results and Discussion
4.1. Fuel Cell Feature Selection
4.1.1. Filter Methods
4.1.2. Wrapper Methods
4.1.3. Embedded Methods
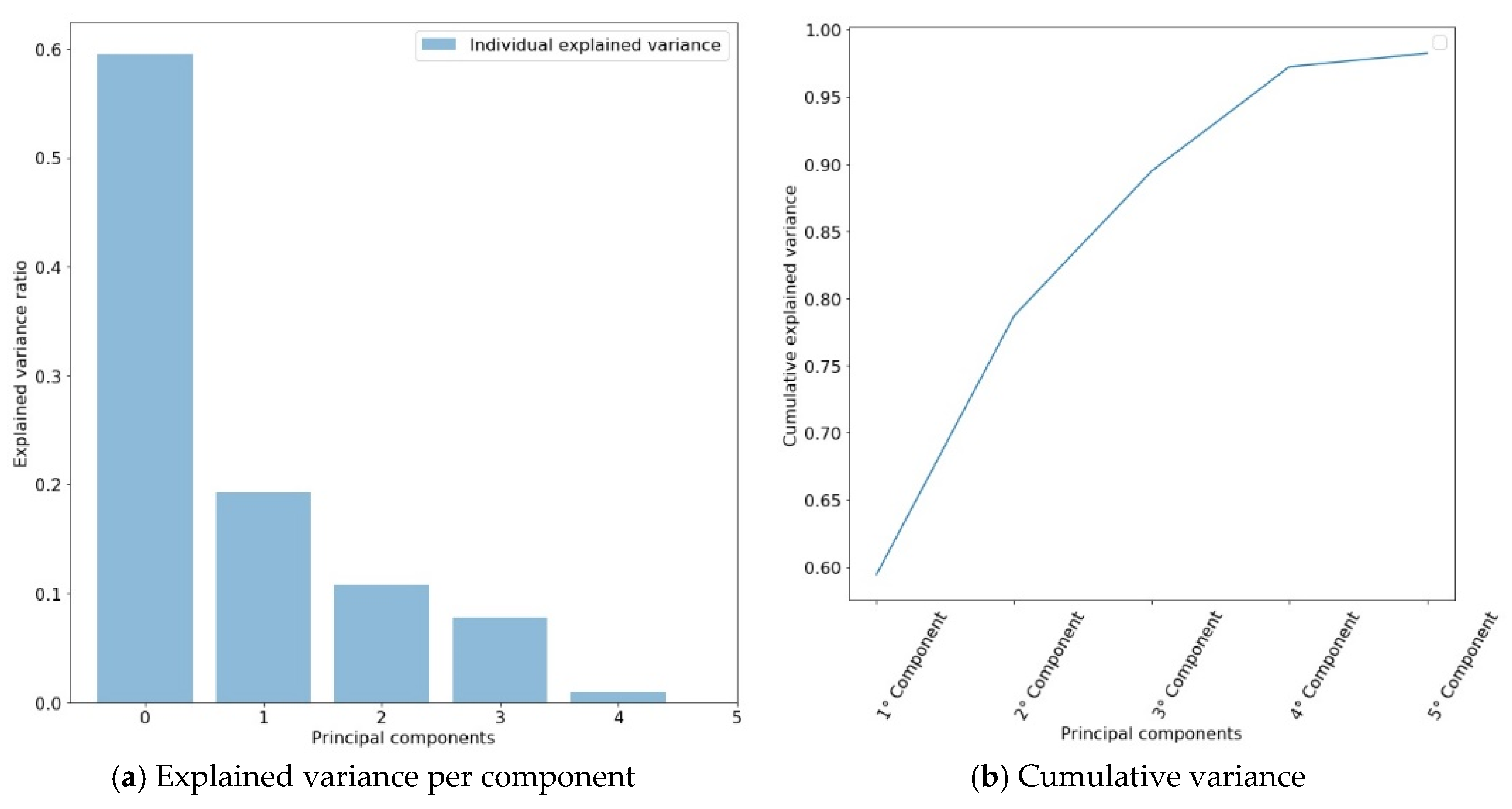
4.1.4. Principal Component Analysis (PCA)
- The air inlet and outlet pressure;
- The hydrogen inlet and outlet pressure; and
- The air inlet flow rate and hydrogen inlet flow rate.
4.2. Data-Driven Control-Oriented Models for PEM Fuel Cells
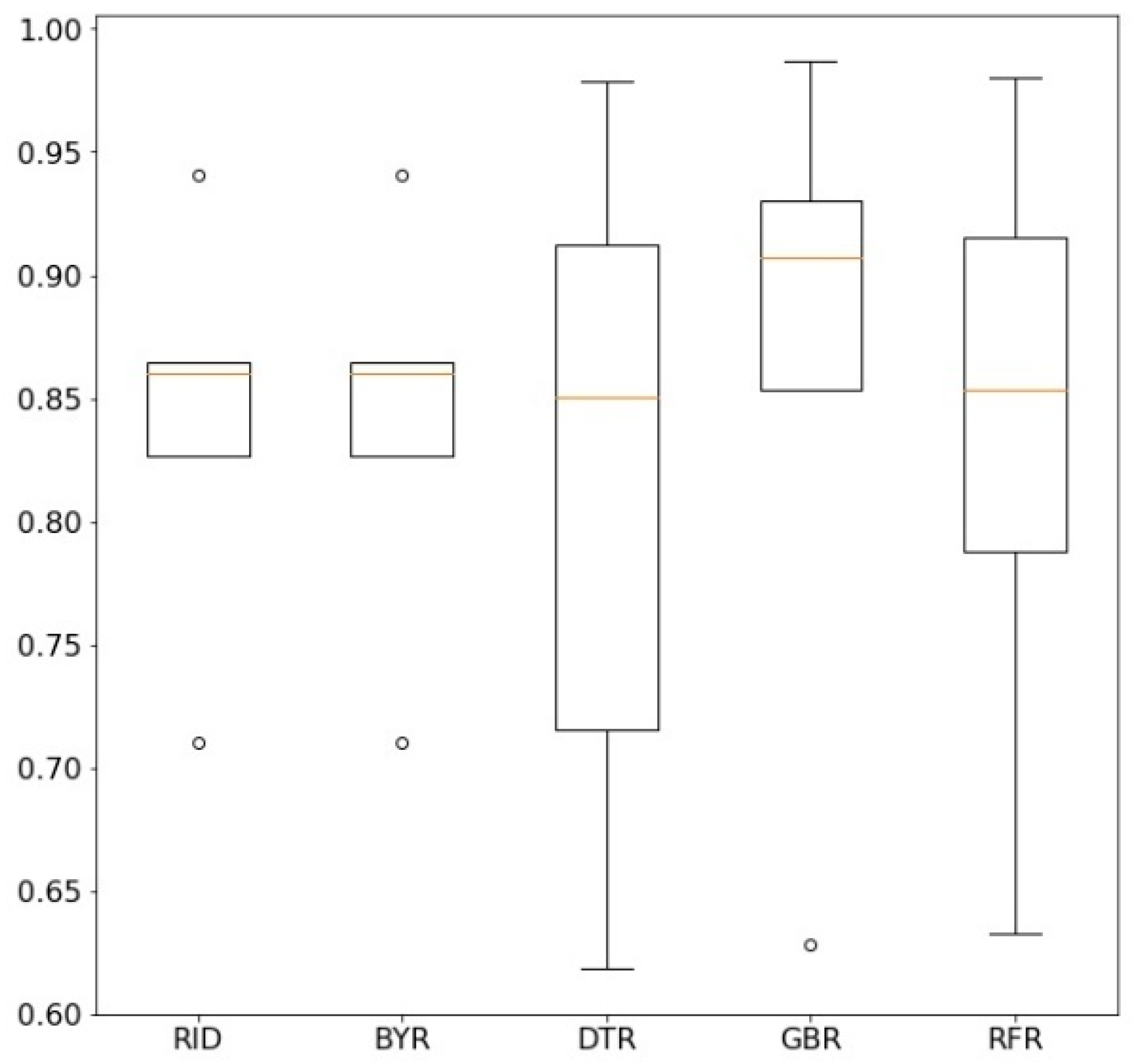
4.2.1. Fuel Cell Modeling Using Machine Learning Regression Algorithms
- RID: 0.840495 (0.075010)
- BYR: 0.840494 (0.075011)
- DTR: 0.815885 (0.131130)
- GBR: 0.860727 (0.124138)
- RFR: 0.830844 (0.120877)
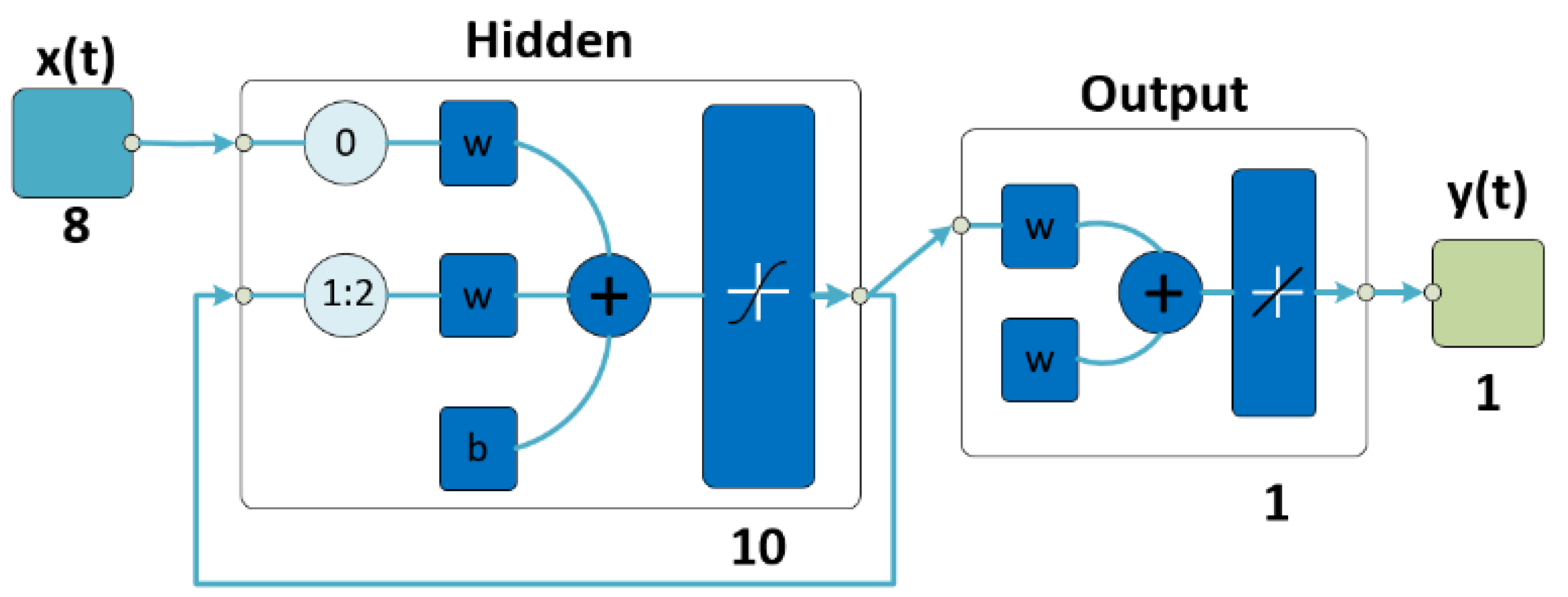
4.2.2. Fuel Cell Modeling Based on Neural Networks
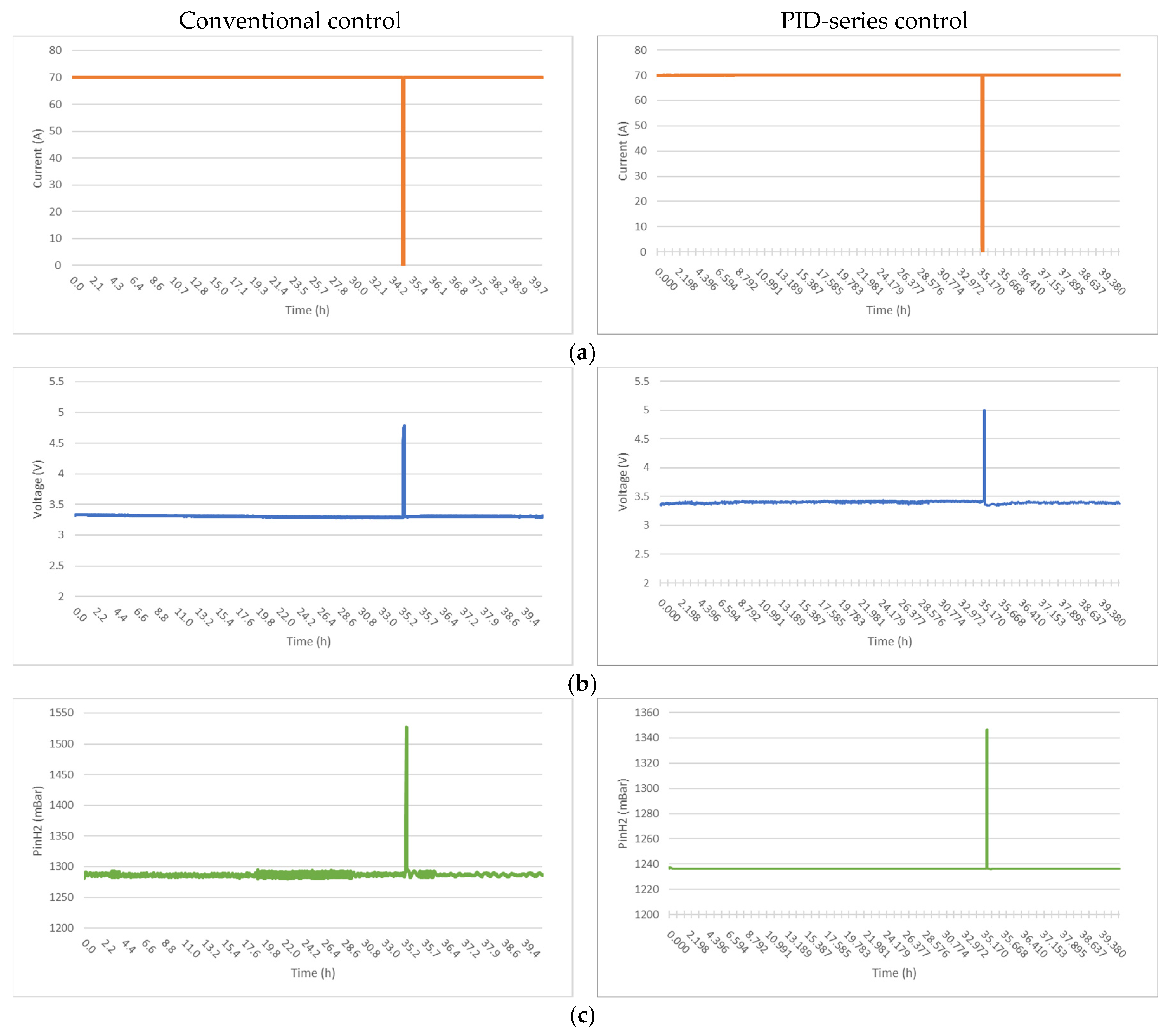
4.3. Hybrid Control Scheme
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Oncel, S.; Vardar-Sukan, F. Application of proton exchange membrane fuel cells for the monitoring and direct usage of biohydrogen produced by Chlamydomonas reinhardtii. J. Power Sources 2011, 196, 46–53. [Google Scholar] [CrossRef]
- Manish, S.; Banerjee, R. Comparison of biohydrogen production processes. Int. J. Hydrogen Energy 2008, 33, 279–286. [Google Scholar] [CrossRef]
- Rahman, S.N.A.; Masdar, M.S.; Rosli, M.I.; Majlan, E.H.; Husaini, T. Overview of Biohydrogen Production Technologies and Application in Fuel Cell. Am. J. Chem. 2015, 5, 13–23. [Google Scholar]
- Kotay, S.M.; Das, D. Biohydrogen as a renewable energy resource—Prospects and potentials. Int. J. Hydrogen Energy 2008, 33, 258–263. [Google Scholar]
- Lucia, U. Overview on fuel cells. Renew. Sustain. Energy Rev. 2014, 30, 164–169. [Google Scholar] [CrossRef]
- Gao, F.; Member, S.; Blunier, B.; Sim, M.G. PEM Fuel Cell Stack Modeling for Real-Time Emulation in Hardware-in-the-Loop Applications. IEEE Trans. Energy Convers. 2011, 26, 184–194. [Google Scholar]
- Daud, W.R.W.; Rosli, R.E.; Majlan, E.H.; Hamid, S.A.A.; Mohamed, R.; Husaini, T. PEM fuel cell system control: A review. Renew. Energy 2017, 113, 620–638. [Google Scholar] [CrossRef]
- Gao, F.; Blunier, B.; Miraoui, A. Proton Exchange Membrane Fuel Cells Modeling; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Puranik, S.V.; Keyhani, A.; Khorrami, F. State-Space Modeling of proton exchange membrane fuel cell. IEEE Trans. Energy Convers. 2010, 25, 804–813. [Google Scholar] [CrossRef]
- Pukrushpan, J.T.; Stefanopoulu, A.G.; Peng, H. Control of Fuel Cell Power Systems, 2nd ed.; Springer-Verlag: London, UK, 2005. [Google Scholar]
- Ainscough, C.; Peterson, D.; Miller, E. Hydrogen Production Cost From PEM Electrolysis. DOE Hydrog. Fuel Cells Progr. Rec. 2014. Available online: https://www.hydrogen.energy.gov/pdfs/14004_h2_production_cost_pem_electrolysis.pdf (accessed on 30 May 2019).
- da Costa Lopes, F.; Watanabe, E.H.; Rolim, L.G.B. A Control-Oriented Model of a PEM Fuel Cell Stack Based on NARX and NOE Neural Networks. IEEE Trans. Ind. Electron. 2015, 62, 5155–5163. [Google Scholar] [CrossRef]
- Napoli, G.; Ferraro, M.; Sergi, F.; Brunaccini, G.; Antonucci, V. Data driven models for a PEM fuel cell stack performance prediction. Int. J. Hydrogen Energy 2013, 38, 11628–11638. [Google Scholar] [CrossRef]
- Sisworahardjo, N.S.; Yalcinoz, T.; El-Sharkh, M.Y.; Alam, M.S. Neural network model of 100 W portable PEM fuel cell and experimental verification. Int. J. Hydrogen Energy 2010, 35, 9104–9109. [Google Scholar] [CrossRef]
- Han, I.S.; Chung, C.B. Performance prediction and analysis of a PEM fuel cell operating on pure oxygen using data-driven models: A comparison of artificial neural network and support vector machine. Int. J. Hydrogen Energy 2016, 41, 10202–10211. [Google Scholar] [CrossRef]
- Kheirandish, A.; Shafiabady, N.; Dahari, M.; Kazemi, M.S.; Isa, D. Modeling of commercial proton exchange membrane fuel cell using support vector machine. Int. J. Hydrogen Energy 2016, 41, 11351–11358. [Google Scholar] [CrossRef]
- Pourkiaei, S.M.; Ahmadi, M.H.; Hasheminejad, S.M. Modeling and experimental verification of a 25W fabricated PEM fuel cell by parametric and GMDH-type neural network. Mech. Ind. 2015, 17, 105. [Google Scholar] [CrossRef]
- Chávez-Ramírez, A.U.; Muñoz-Guerrero, R.; Duron-Torres, S.M.; Ferraro, M.; Brunaccini, G.; Sergi, F.; Antonucci, V.; Arriaga, L.G. High power fuel cell simulator based on artificial neural network. Int. J. Hydrogen Energy 2010, 35, 12125–12133. [Google Scholar] [CrossRef]
- Ma, R.; Yang, T.; Breaz, E.; Li, Z.; Briois, P.; Gao, F. Data-driven proton exchange membrane fuel cell degradation predication through deep learning method. Appl. Energy 2018, 231, 102–115. [Google Scholar] [CrossRef]
- Lin-kwong-chon, C.; Grondin-pérez, B.; Kadjo, J.A.; Damour, C.; Benne, M. A review of adaptive neural control applied to proton exchange membrane fuel cell systems. Annu. Rev. Control 2019, 47, 133–154. [Google Scholar] [CrossRef]
- Rakhtala, S.M.; Ghaderi, R.; Noei, A.R. Proton exchange membrane fuel cell voltage-tracking using artificial neural networks. J. Zhejiang Univ. Sci. C 2011, 12, 338–344. [Google Scholar] [CrossRef]
- Abbaspour, A.; Khalilnejad, A.; Chen, Z. Robust adaptive neural network control for PEM fuel cell. Int. J. Hydrogen Energy 2016, 41, 20385–20395. [Google Scholar] [CrossRef] [Green Version]
- Aliasghary, M. Control of PEM Fuel Cell Systems Using Interval Type-2 Fuzzy PID Approach. Fuel Cells 2018, 18, 449–456. [Google Scholar] [CrossRef]
- Kheirandish, A.; Motlagh, F.; Shafiabady, N.; Dahari, M.; Wahab, A.K.A. Dynamic fuzzy cognitive network approach for modelling and control of PEM fuel cell for power electric bicycle system. Appl. Energy 2017, 202, 20–31. [Google Scholar] [CrossRef]
- IEEE PHM 2014 Data Challenge. 2014. Available online: http://eng.fclab.fr/ieee-phm-2014-data-challenge/ (accessed on 22 May 2019).
- Almeida, P.E.M.; Simões, M.G. Neural optimal control of PEM fuel cells with parametric CMAC networks. IEEE Trans. Ind. Appl. 2005, 41, 237–245. [Google Scholar] [CrossRef]
- Placca, L.; Kouta, R.; Candusso, D.; Blachot, J.F.; Charon, W. Analysis of PEM fuel cell experimental data using principal component analysis and multi linear regression. Int. J. Hydrogen Energy 2010, 35, 4582–4591. [Google Scholar] [CrossRef] [Green Version]
- Al-Othman, A.K.; Ahmed, N.A.; Al-Fares, F.S.; AlSharidah, M.E. Parameter Identification of PEM Fuel Cell Using Quantum-Based Optimization Method. Arab. J. Sci. Eng. 2015, 40, 2619–2628. [Google Scholar] [CrossRef]
- Hatti, M.; Tioursi, M. Dynamic neural network controller model of PEM fuel cell system. Int. J. Hydrogen Energy 2009, 34, 5015–5021. [Google Scholar] [CrossRef]
- Omatu, S.; Yoshioka, M.; Kosaka, T.; Yanagimoto, H. Neuro-PID Control of Speed and Torque of Electric Vehicle. Int. J. Adv. Syst. Meas. 2010, 3, 82–91. [Google Scholar]
- Rosli, R.E.; Sulong, A.B.; Daud, W.R.W.; Zulkifley, M.A.; Rosli, M.I.; Majlan, E.H.; Haque, M.A. Reactant Control System for Proton Exchange Membrane Fuel Cell. Procedia Eng. 2016, 148, 615–620. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Unit |
|---|---|---|
| Time | Time aging | H |
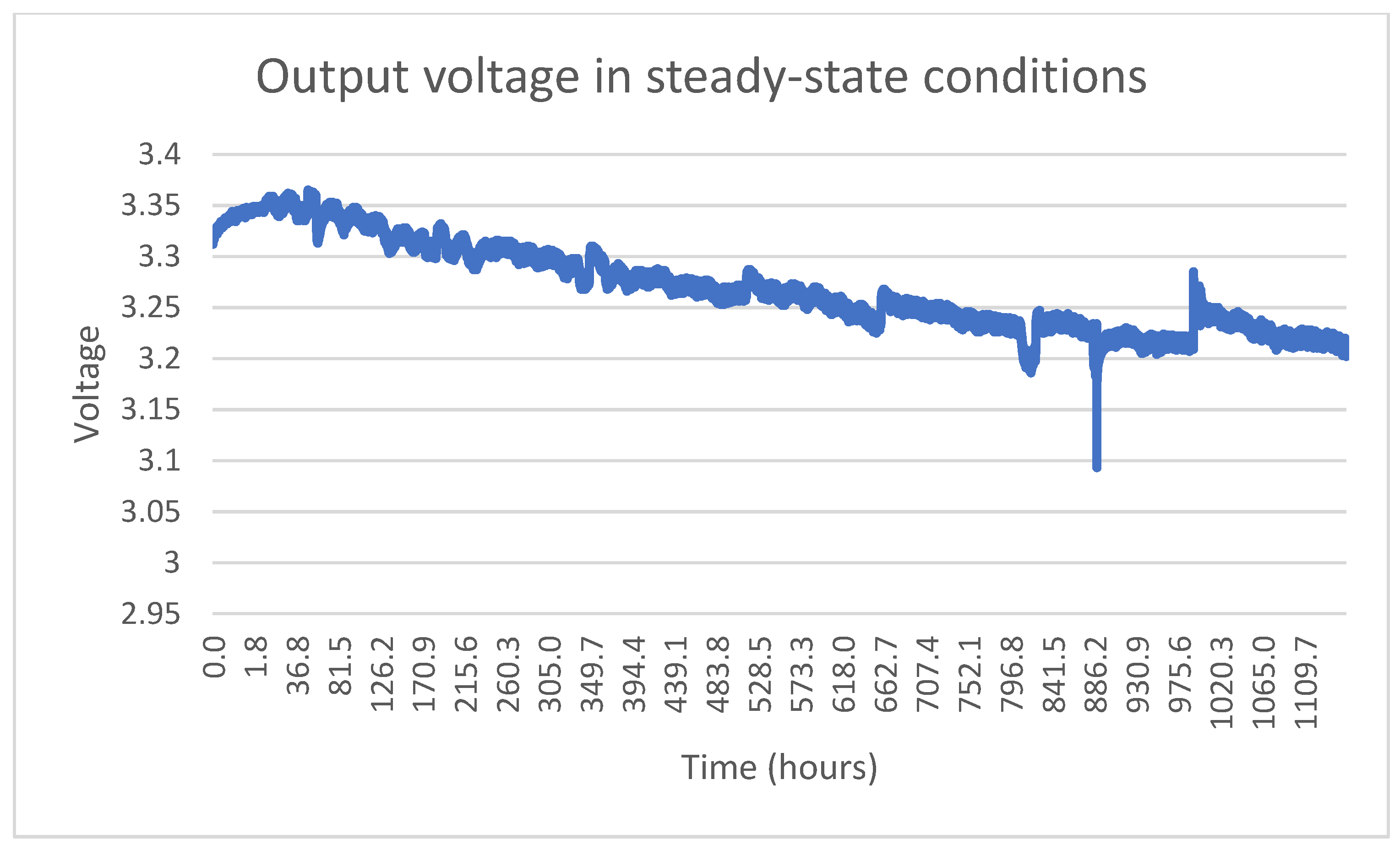
| Vout | Stack output voltage | V |
| I | Current | A |
| J | Current density | A/cm2 |
| Tin, Tout H2 | Inlet and outlet H2 temperature | °C |
| Tin, Tout Air | Inlet and outlet air temperature | °C |
| Pin, Pout H2 | Inlet and outlet H2 pressure | mBar |
| Fin, Fout H2 | Inlet and outlet H2 flow | L/min |
| Fin, Fout Air | Inlet and outlet air flow | L/min |
| Fwat | Flow rate of cooling water | L/min |
| HrAIR | Inlet Hygrometry (Air) | % |
| Parameter | Range |
|---|---|
| Air flow | 0 to 100 L/min |
| H2 flow | 0 to 30 L/min |
| Gas pressure | 0 to 2 bars |
| Temperature | 20 to 80 °C |
| Cell current | 0 to 300 A |
| Variables | Type |
|---|---|
| Current | State variable |
| Hydrogen inlet temp. | State variable |
| Air inlet temp. | State variable |
| Air inlet pressure | Input system |
| Air outlet pressure | State variable |
| Hydrogen inlet pressure | Input system |
| Hydrogen outlet pressure | State variable |
| Fold | Score |
|---|---|
| 1 | 0.955929840882997 |
| 2 | 0.953074662444409 |
| 3 | 0.959505398134269 |
| 4 | 0.957813889951952 |
| 5 | 0.958048357252375 |
| 6 | 0.958116362163286 |
| 7 | 0.959355574634461 |
| 8 | 0.960026345242201 |
| 9 | 0.966767102061810 |
| 10 | 0.971974506261939 |
| Ave. | 0.960061203902970 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morán-Durán, A.; Martínez-Sibaja, A.; Rodríguez-Jarquin, J.P.; Posada-Gómez, R.; González, O.S. PEM Fuel Cell Voltage Neural Control Based on Hydrogen Pressure Regulation. Processes 2019, 7, 434. https://doi.org/10.3390/pr7070434
Morán-Durán A, Martínez-Sibaja A, Rodríguez-Jarquin JP, Posada-Gómez R, González OS. PEM Fuel Cell Voltage Neural Control Based on Hydrogen Pressure Regulation. Processes. 2019; 7(7):434. https://doi.org/10.3390/pr7070434
Chicago/Turabian StyleMorán-Durán, Andrés, Albino Martínez-Sibaja, José Pastor Rodríguez-Jarquin, Rubén Posada-Gómez, and Oscar Sandoval González. 2019. "PEM Fuel Cell Voltage Neural Control Based on Hydrogen Pressure Regulation" Processes 7, no. 7: 434. https://doi.org/10.3390/pr7070434
APA StyleMorán-Durán, A., Martínez-Sibaja, A., Rodríguez-Jarquin, J. P., Posada-Gómez, R., & González, O. S. (2019). PEM Fuel Cell Voltage Neural Control Based on Hydrogen Pressure Regulation. Processes, 7(7), 434. https://doi.org/10.3390/pr7070434