Analysis of Dynamic Characteristics of a 600 kW Storage Type Wind Turbine with Hybrid Hydraulic Transmission

Abstract
:1. Introduction
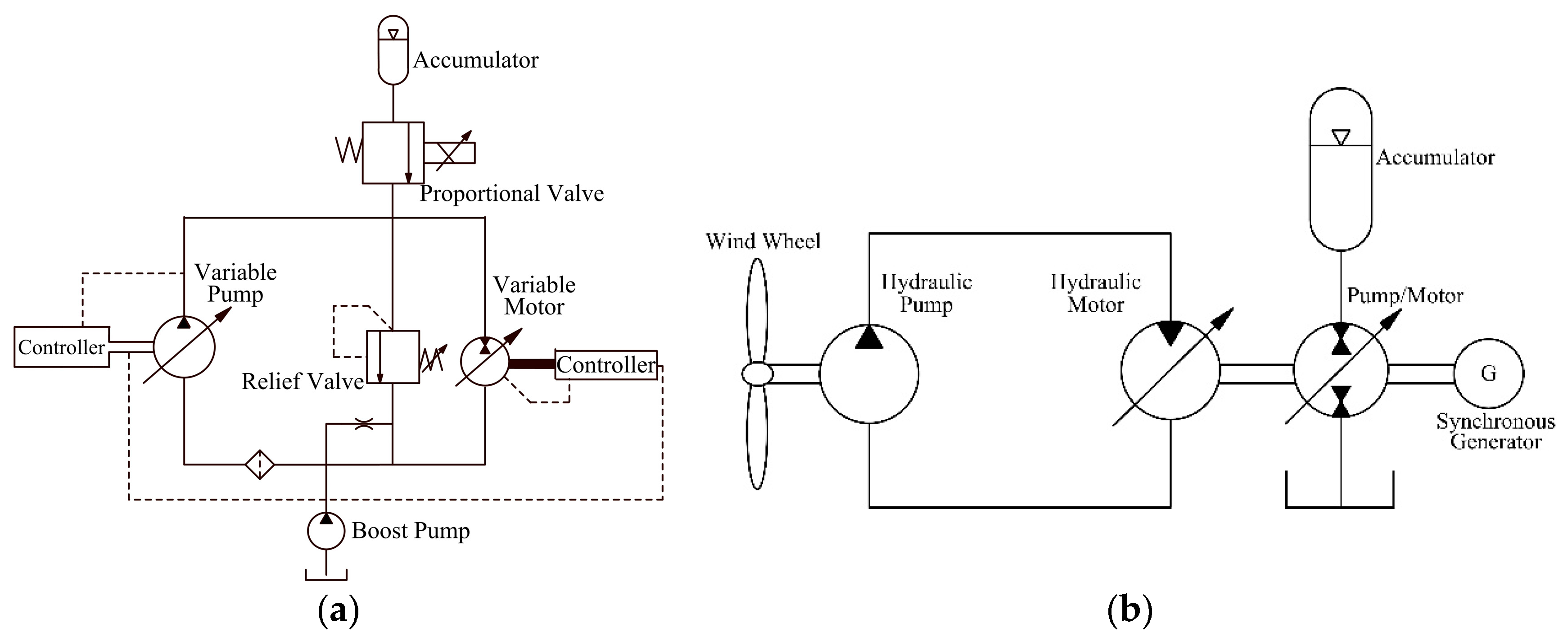
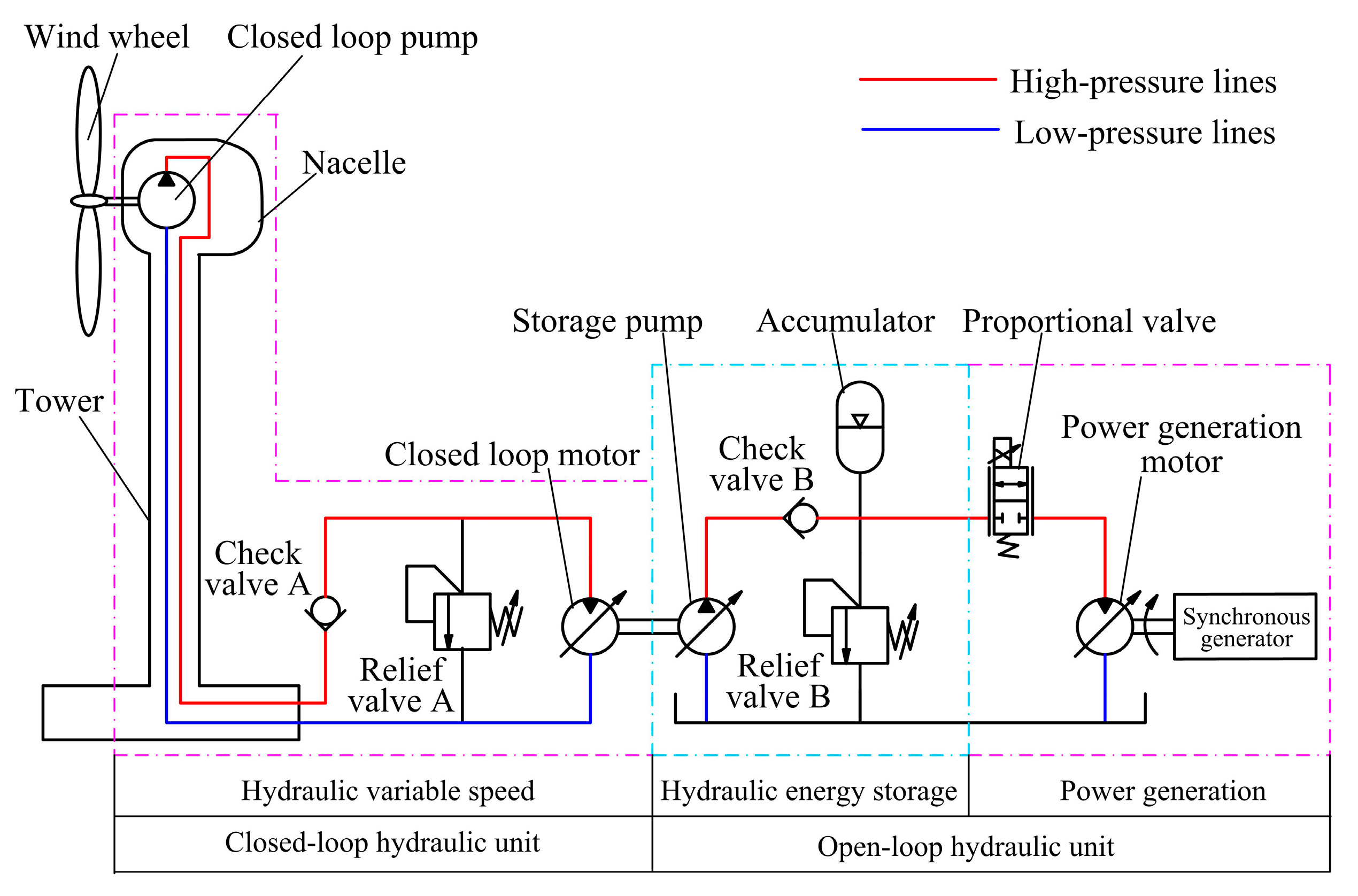
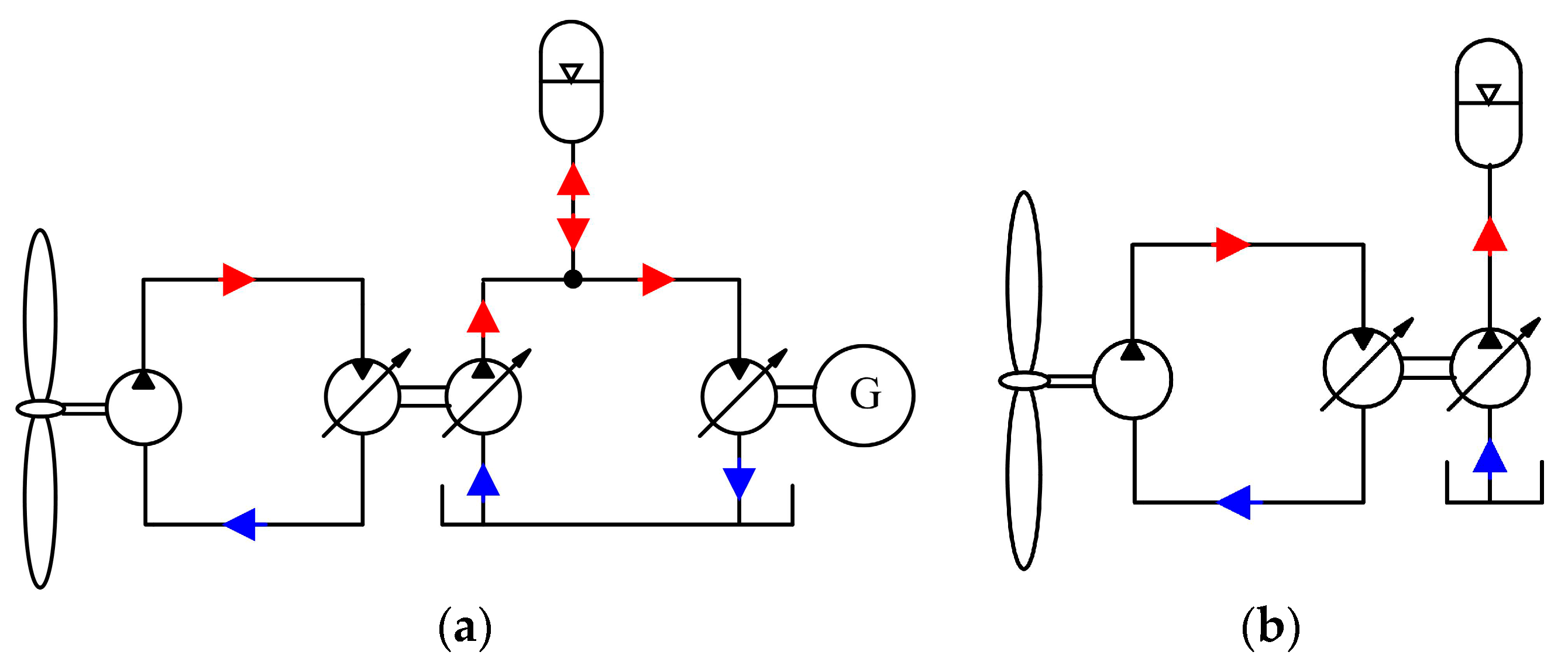
2. System Overview and Operation Mode
3. Mathematical Model
3.1. Wind Turbine
3.2. Hydraulic Variable Speed
3.2.1. Closed Loop Pump
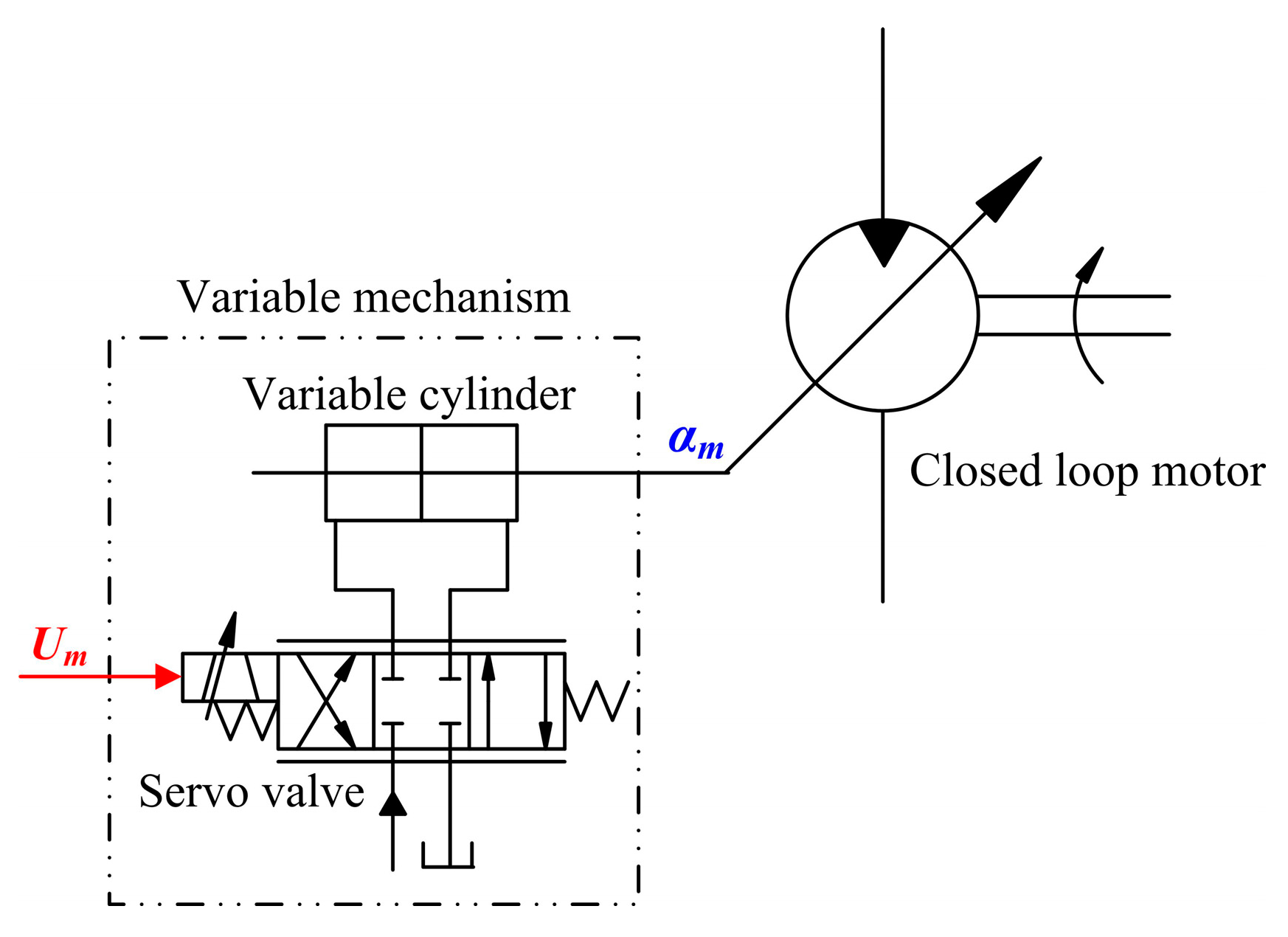
3.2.2. Closed Loop Motor
3.3. Hydraulic Energy Storage
3.3.1. Storage Pump
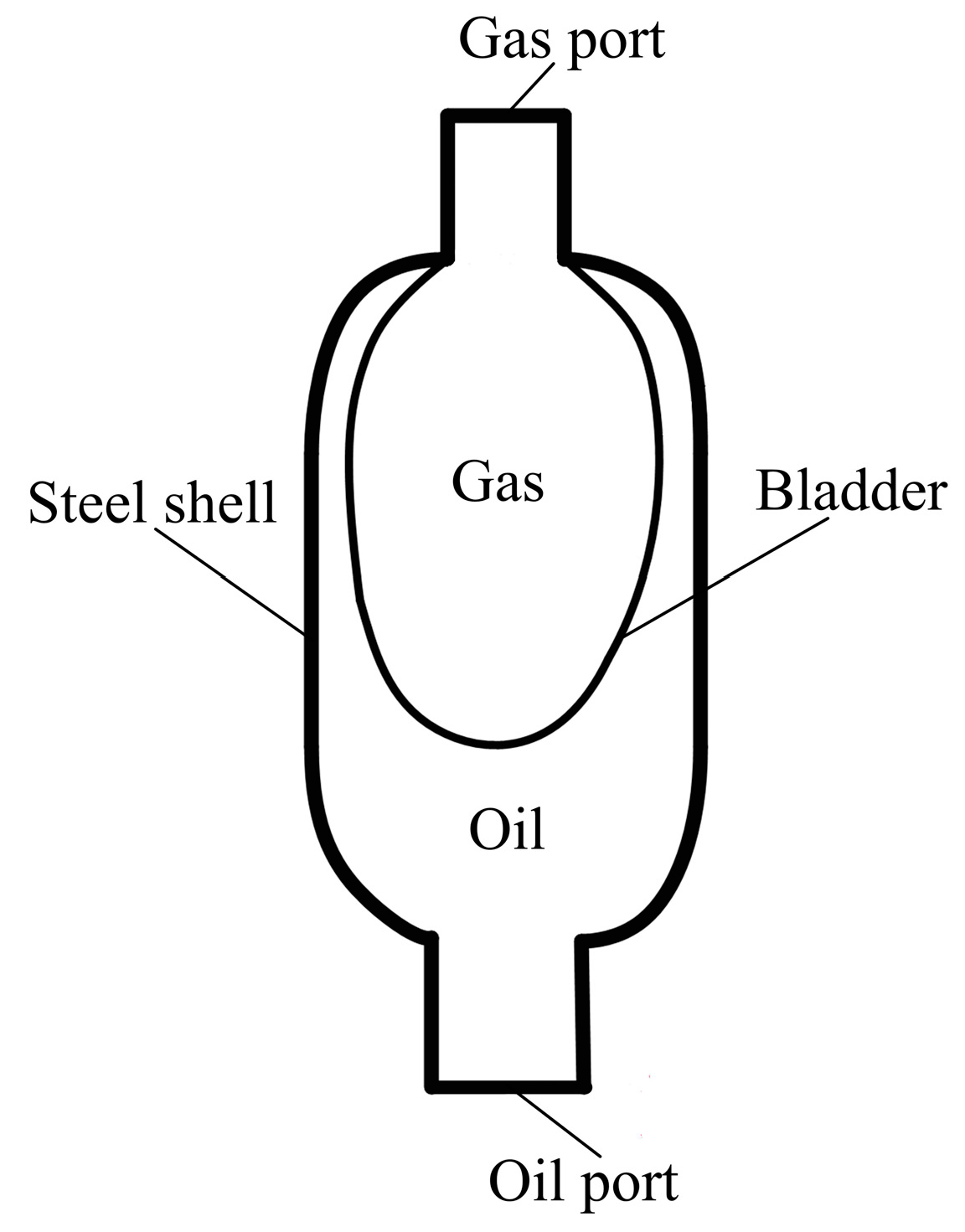
3.3.2. Hydraulic Accumulator
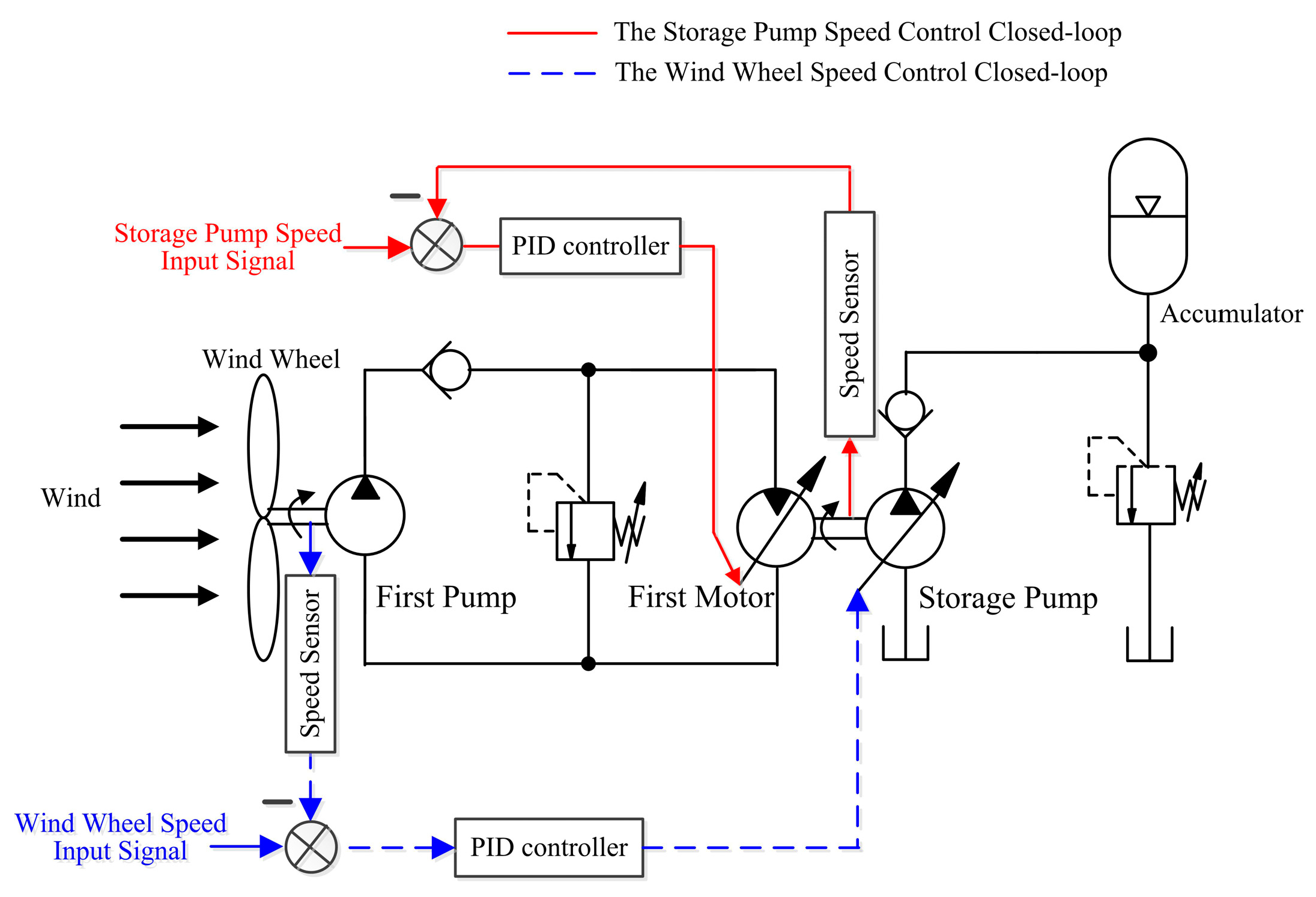
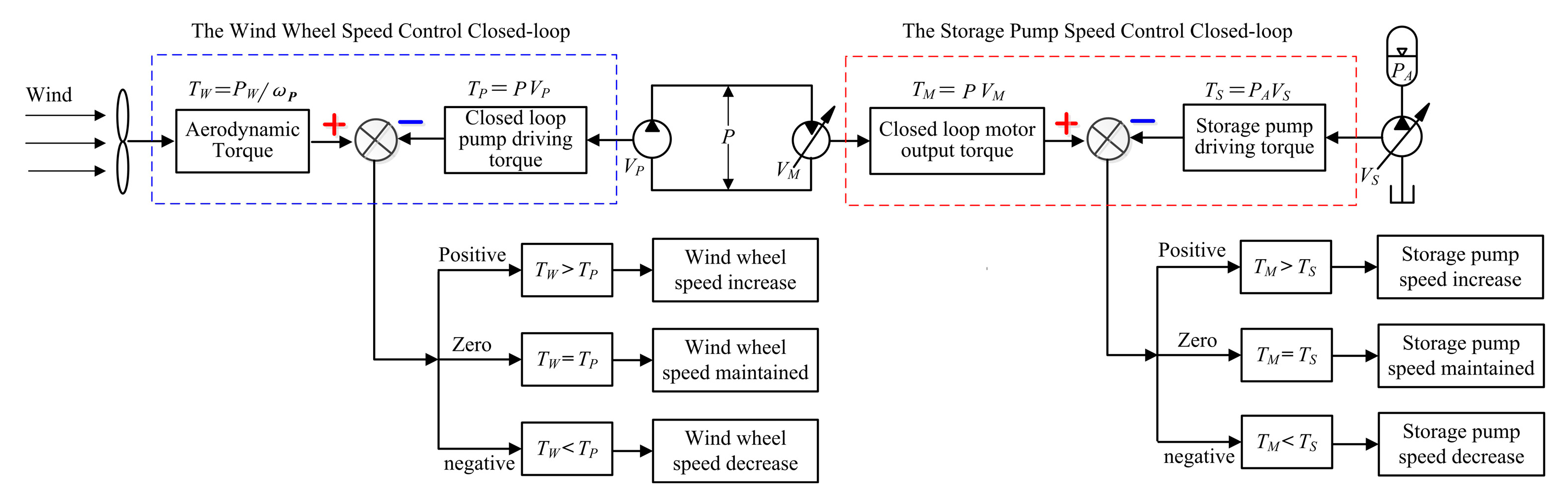
4. Control Scheme
5. Simulation and Analysis
5.1. The Parameters of the 600 kW Storage Type Wind Turbine
5.1.1. Wind Turbine
5.1.2. Hydraulic Variable Speed
5.1.3. Hydraulic Energy Storage
5.2. Time Domain Simulations
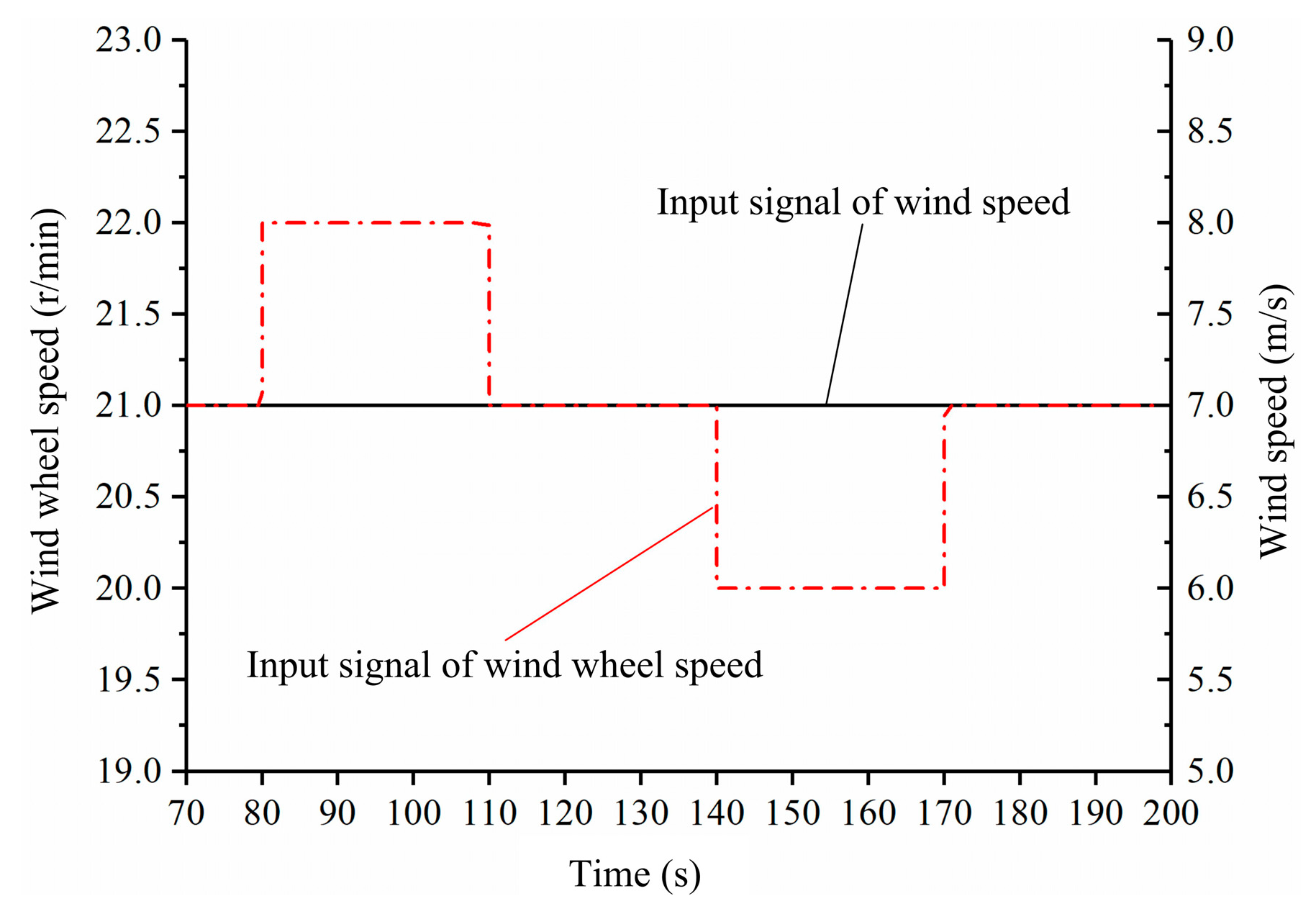
5.2.1. System Input
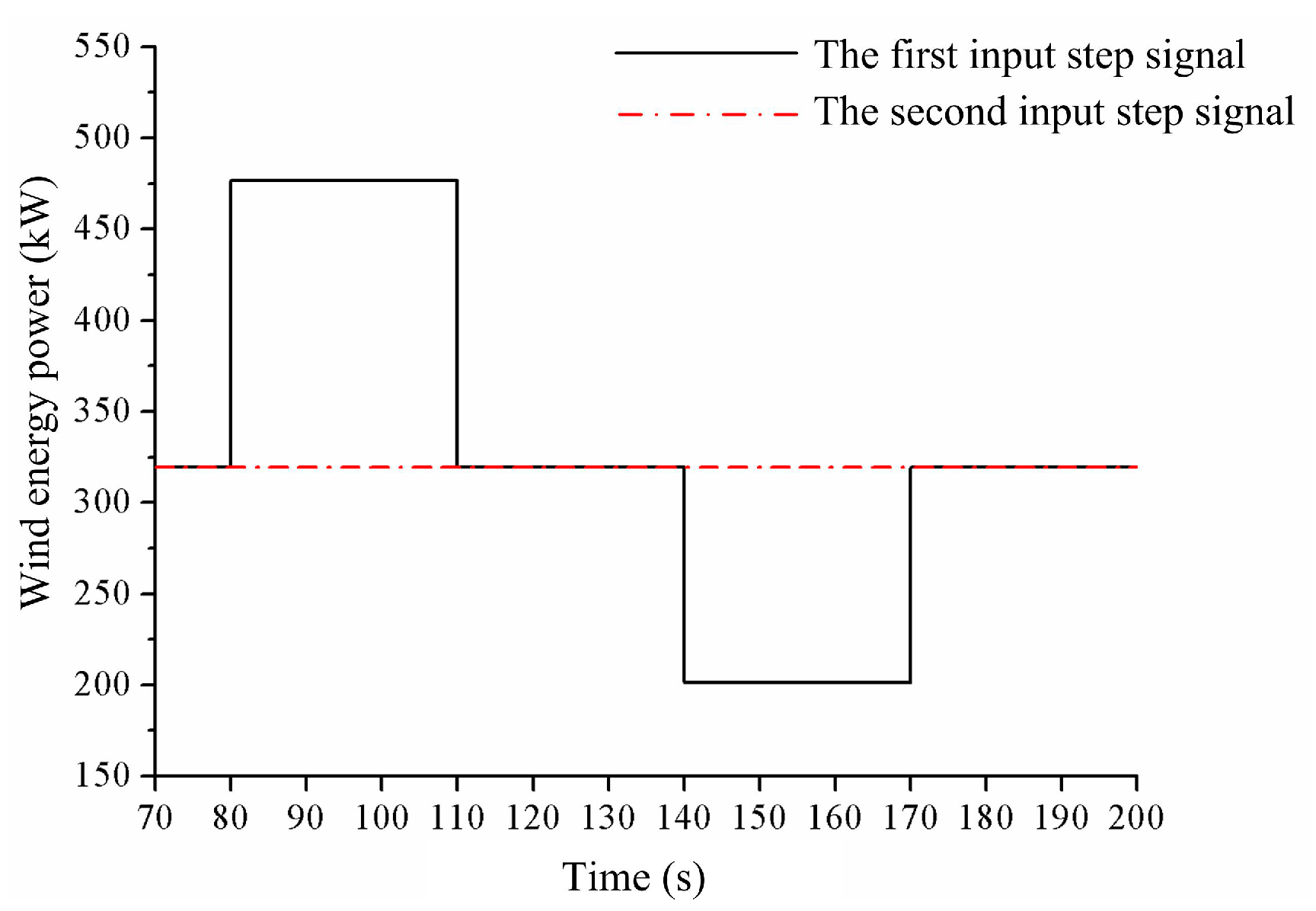
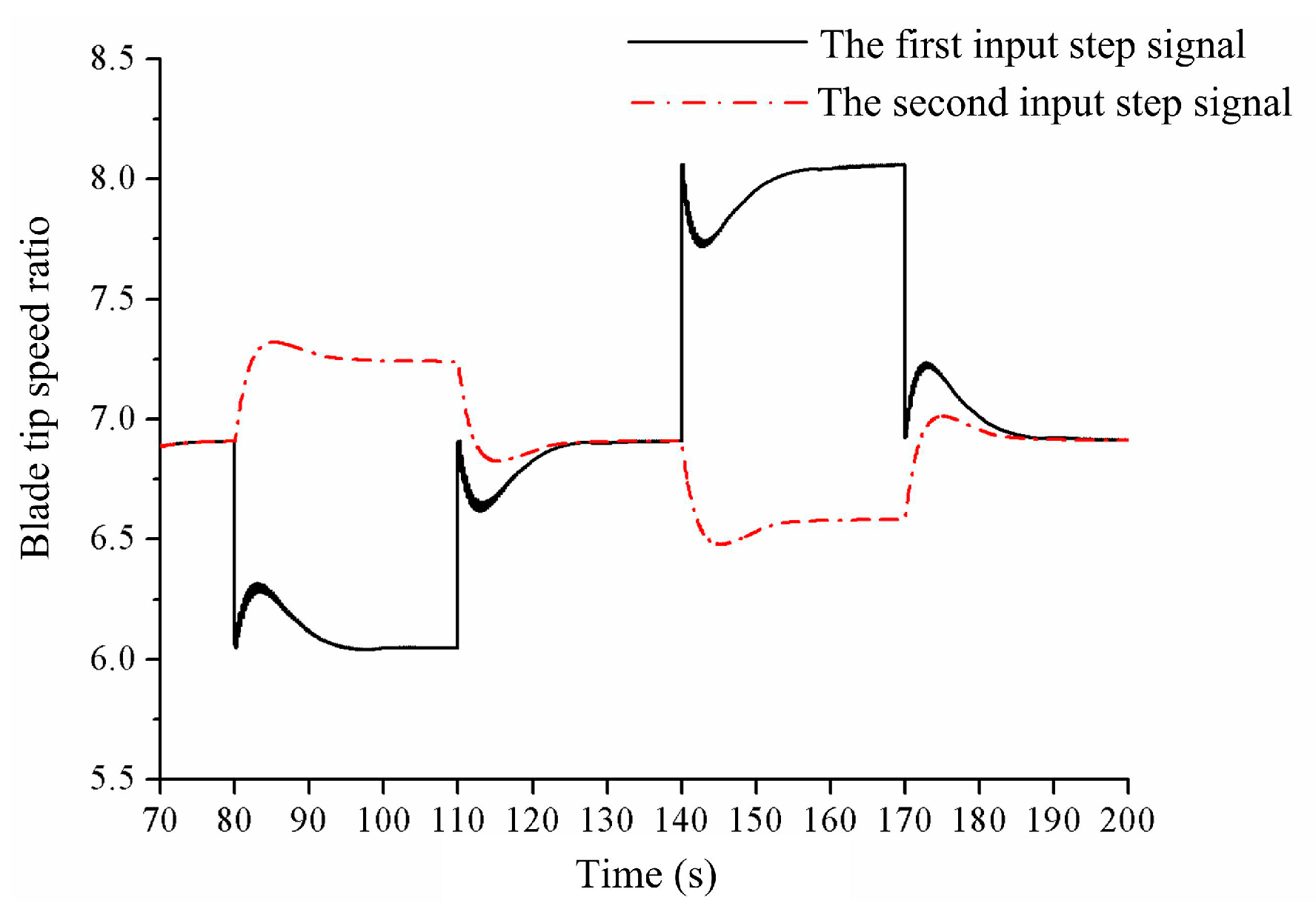
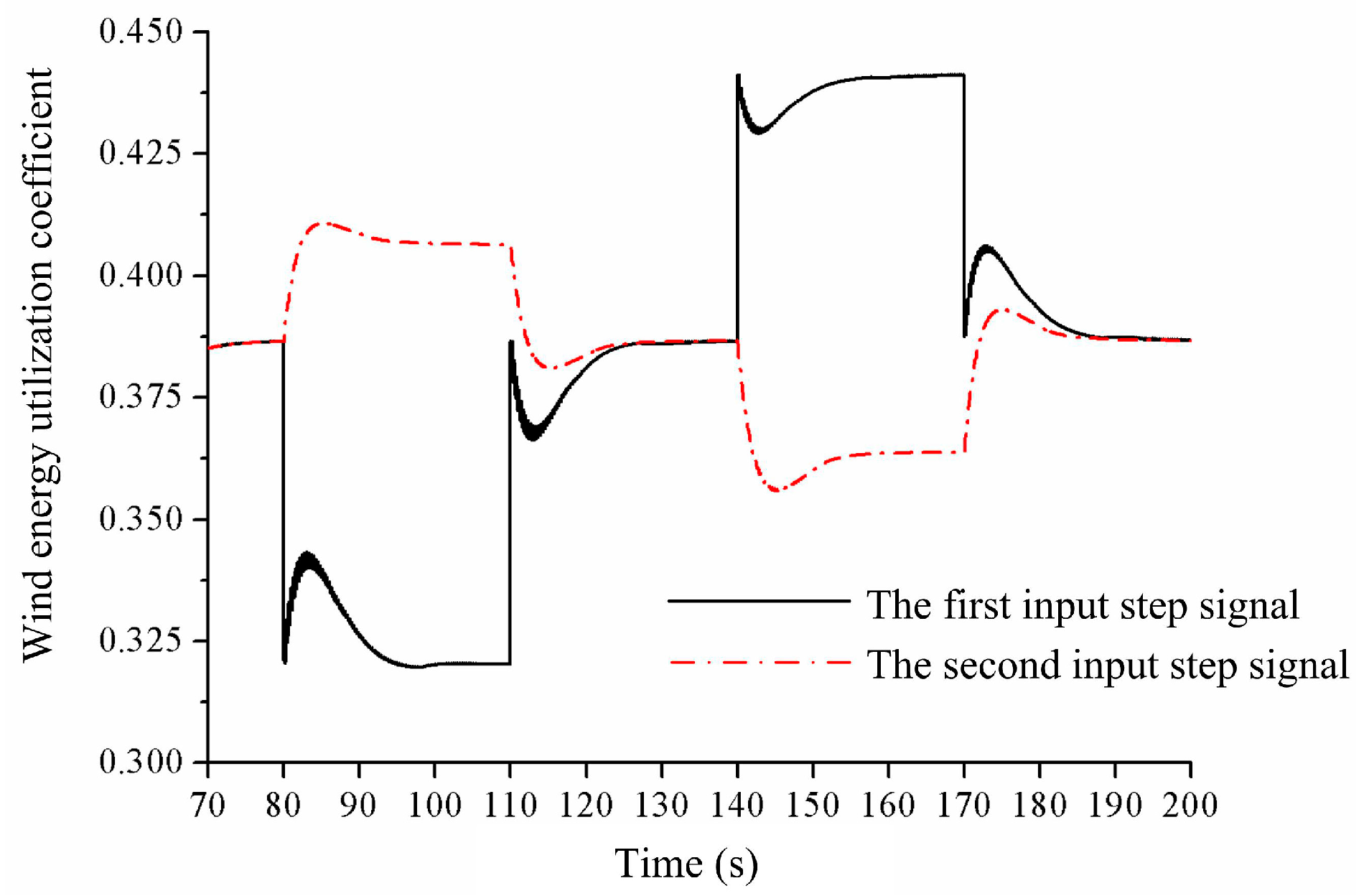
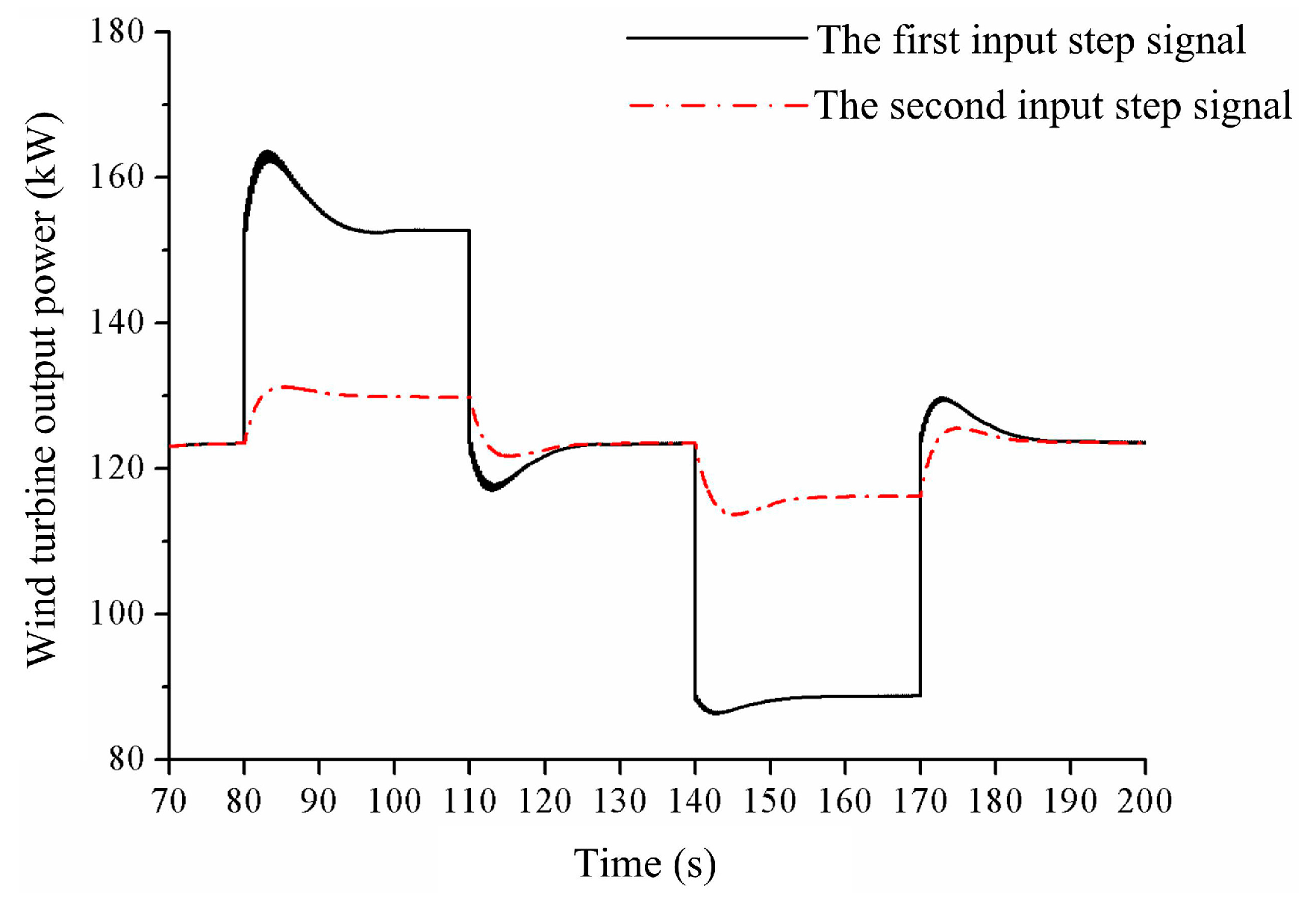
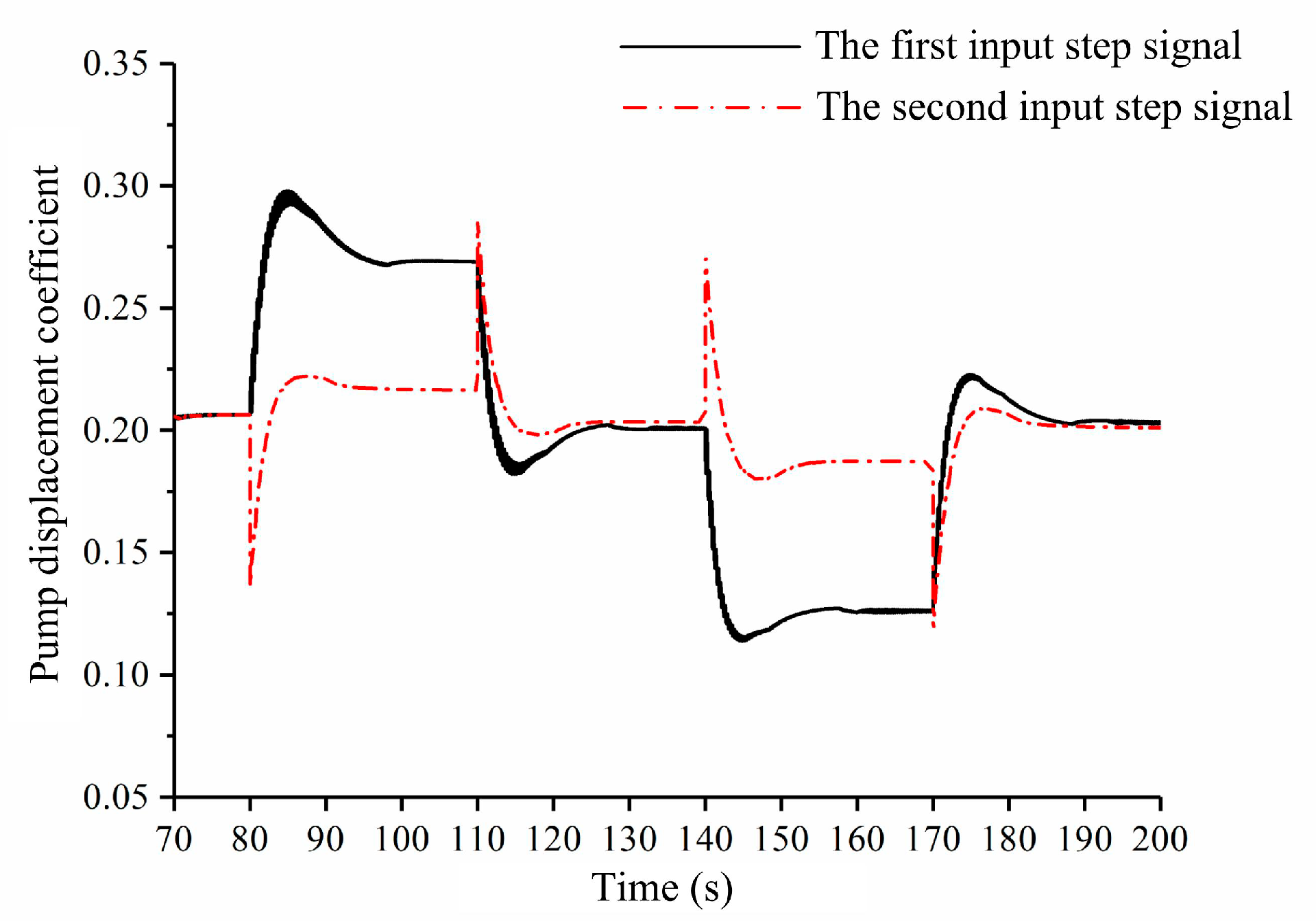
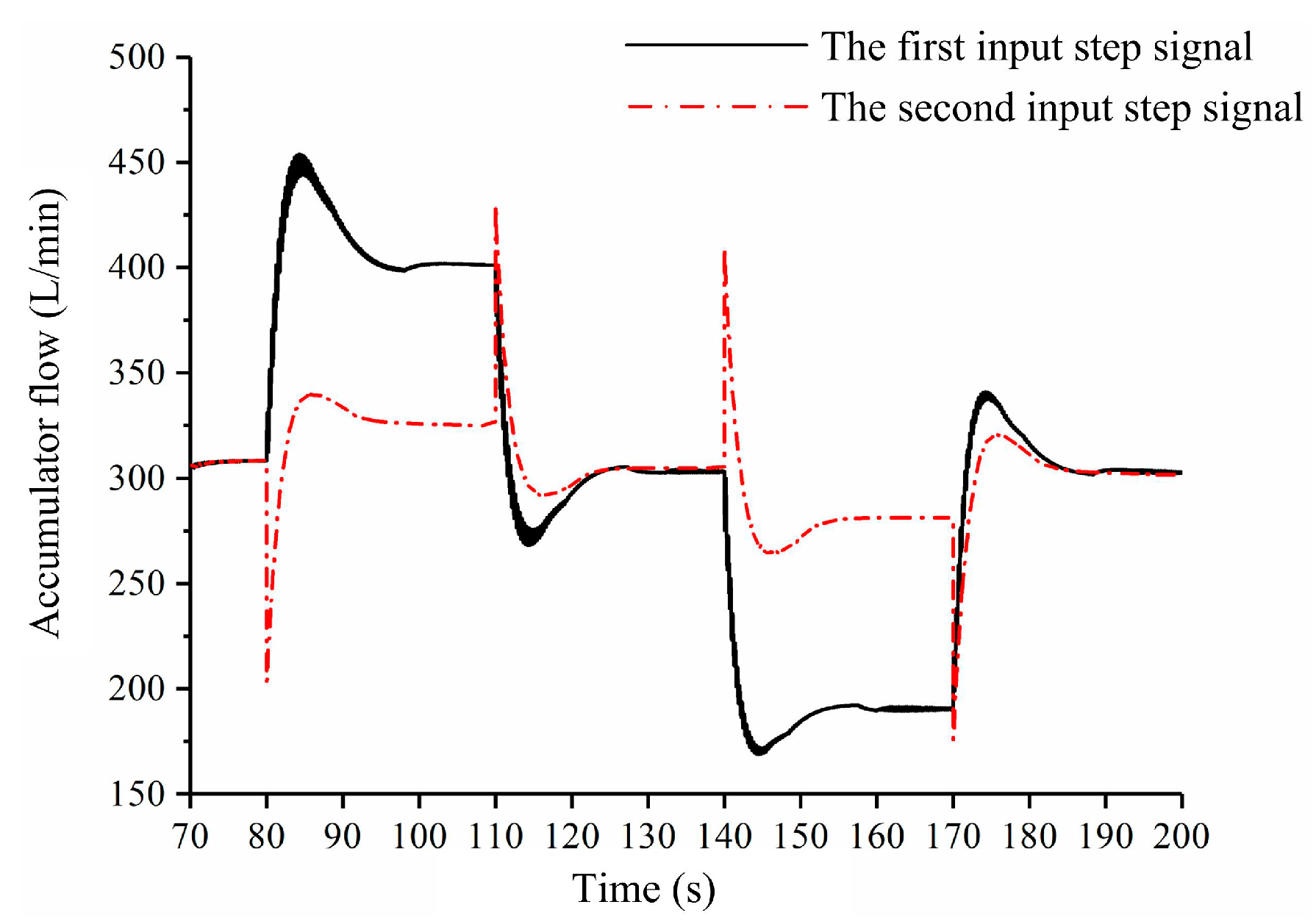
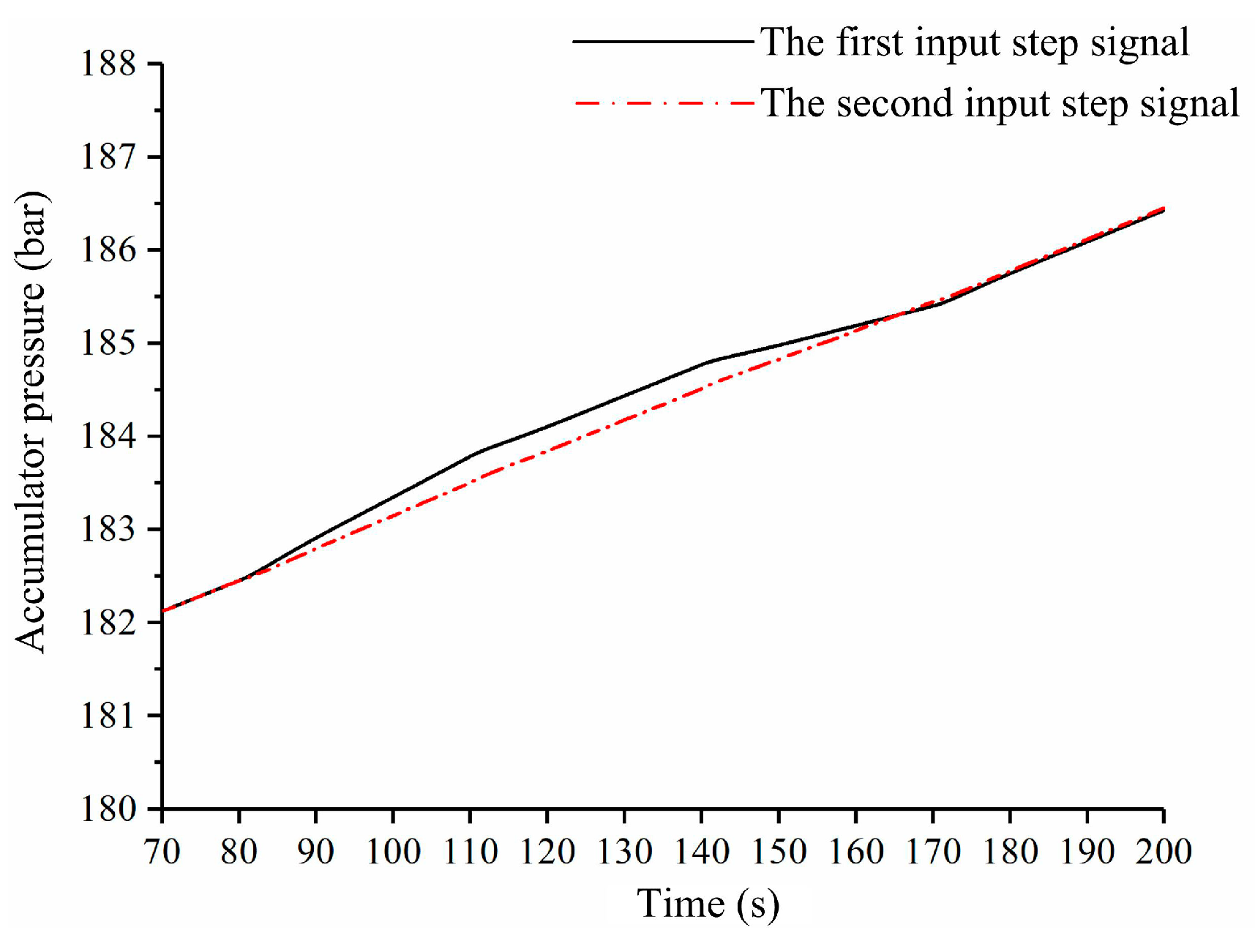
5.2.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Enevoldsen, P.; Xydis, G. Examining the trends of 35 years growth of key wind turbine components. Energy Sustain. Dev. 2019, 50, 8–26. [Google Scholar] [CrossRef]
- Cheng, Q.M. Overview of the development of control technique for wind power generation system. Process Autom. Instrum. 2012, 33, 1–8. [Google Scholar]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration based condition monitoring and fault diagnosis of wind turbine planetary gear-box: A review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Yang, W.; Tavner, P.J.; Wilkinson, M.R. Condition monitoring and fault diagnosis of a wind turbine synchronous generator drive train. IET Renew. Power Gener. 2009, 3, 1–11. [Google Scholar] [CrossRef]
- Bensalah, A.; Benhamida, M.; Barakat, G. Large wind turbine generators: State-of-the-art review. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Cai, M.; Wang, Y.; Jiao, Z.; Shi, Y. Review of fluid and control technology of hydraulic wind turbines. Front. Mech. Eng. 2017, 12, 312–320. [Google Scholar] [CrossRef] [Green Version]
- Rybak, S.C. Description of the 3 Mw Swt-3 Wind Turbine at San Gorgonio Pass, California, Bien Wind Energy Conference Workshop; Bendix Corp., Environment and Technology Office: Sylmar, CA, USA, 1982; Volume 1, pp. 193–206. [Google Scholar]
- Browning, J.R.; Manwell, J.F.; Mcgowan, J.G. A techno-economic analysis of a proposed 1.5 mw wind turbine with a hydrostatic drive train. Wind Eng. 2009, 33, 571–586. [Google Scholar] [CrossRef]
- Doe, E. Advanced Wind Turbine Drivetrain Concepts: Workshop Report; No. DOE/GO-102010-3198; National Renewable Energy Lab (NREL): Golden, CO, USA, 2010.
- Thomsen, K.E.; Dahlhaug, O.; Niss, M.O.K.; Haugseta, S.K. Technological advances in hydraulic drive trains for wind turbines. Energy Procedia 2012, 24, 76–82. [Google Scholar] [CrossRef]
- Mortensen, K.A.; Henriksen, K.H. Efficiency Analysis of a Radial Piston Pump Applied in a 5mw Wind Turbine with Hydraulic Transmission; Aalborg University: Aalborg, Denmark, 2011; pp. 2–3. [Google Scholar]
- Schmitz, J.; Vatheuer, N.; Murrenhoff, H. Development of a hydrostatic transmission for wind turbines. In Proceedings of the 7th International Fluid Power Conference, Aachen, Germany, 22–24 March 2010. [Google Scholar]
- Schmitz, J.; Vatheuer, N.; Murrenhoff, H. Hydrostatic drive train in wind energy plants. RWTH Aachen Univ. IFAS Aachen Ger. 2011. Available online: https://sari-energy.org/oldsite/PageFiles/What_We_Do/activities/EWEC_2011_Brussels/Presentations/Scientifics573.pdf (accessed on 27 May 2019).
- Schmitz, J.; Diepeveen, N.F.B.; Vatheuer, N.; Murrenhoff, H. Dynamic transmission response of a hydrostatic transmission measured on a test bench. In Proceedings of the European Wind Energy Conference and Exhibition (EWEA 2012), Copenhagen, Denmark, 16–19 April 2012. [Google Scholar]
- Eaton. Microgrid Content Journey [EB/OL]. 2010. Available online: http://www.eaton.com/FTC/utilities/IntelligentMicrogrids/index.htm (accessed on 27 May 2019).
- Eriksen, P.B.; Ackermann, T.; Abildgaard, H.; Smith, P.; Winter, W.; Garcia, J.M.R. System operation with high wind penetration. IEEE Power Energy Mag. 2005, 3, 65–74. [Google Scholar] [CrossRef]
- Dutta, R. Modeling and Analysis of Short Term Energy Storage for Mid-Size Hydrostatic Wind Turbine; The University of Minnesota Press: Minnesota, MN, USA, 2012. [Google Scholar]
- Vaezi, M.; Izadian, A. Energy storage techniques for hydraulic wind power systems. In Proceedings of the 2014 International Conference on Renewable Energy Research and Application (ICRERA), Milwaukee, WI, USA, 19–22 October 2014. [Google Scholar]
- Díaz-González, F.; Sumper, A.; Gomis-Bellmunt, O.; Villafáfila-Robles, R. A review of energy storage technologies for wind power applications. Renew. Sustain. Energy Rev. 2012, 16, 2154–2171. [Google Scholar] [CrossRef]
- Whitby, R.D. Hydraulic fluids in wind turbines. Tribol. Luburication Technol. 2010, 66, 72. [Google Scholar]
- Liu, Z.G.; Yang, G.; Wei, L.J.; Yue, D.L. Variable speed and constant frequency control of hydraulic wind turbine with energy storage system. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Liu, Z.G.; Yang, G.L.; Wei, L.J.; Yue, D.L.; Tao, Y.H. Research on the robustness of the constant speed control of hydraulic energy storage generation. Energies 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Wei, L.J.; Liu, Z.G.; Zhao, Y.Y.; Wang, G.; Tao, Y.H. Modeling and control of a 600 kw closed hydraulic wind turbine with an energy storage system. Appl. Sci. 2018, 8, 1–18. [Google Scholar] [CrossRef]
- Heier, S. Grid Integration of Wind Energy: Onshore and Offshore Conversion Systems, 3rd ed.; John Wiley & Sons: West Sussex, WS, UK, 2014; pp. 43–44. ISBN 978-1-119-96294-6. [Google Scholar]
- Merritt, H. Hydraulic Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 1991; pp. 152–156. ISBN 978-0-471-59617-2. [Google Scholar]
- Pei, R.; Shen, M.J.; Xiao-Ming, W.U. Working parameter selection of bladder-type accumulator considering the effects of the poly index and temperature. Chin. Hydraul. Pneum. 2014, 12, 96–99. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Rated power | Prated | 600 | kW |
| Hub height | H | 46 | m |
| Rotor diameter | D | 43 | m |
| Maximum rotor speed | ωm | 27 | r/min |
| Rated wind speed | Vrated | 15.5 | m/s |
| Cut in wind speed | Vin | 3.5 | m/s |
| Cut out wind speed | Vout | 25 | m/s |
| Moment of inertia | JW | 20,000 | kg·m2 |
| Coefficient of viscosity | Bp | 50 | N·m/(r/min) |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Closed loop pump displacement | Vcp | 55,300 | cm3/rev |
| Closed loop motor max displacement | Vcm | 500 | cm3/rev |
| Relief valve A cracking pressure | PA | 210 | bar |
| Pipe diameter | Dcp | 100 | mm |
| Pipe length | Lcp | 115 | m |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Energy storage pump max displacement | Vsp | 500 | cm3/rev |
| Accumulator volume | V0 | 6000 | L |
| Gas pre-charge pressure | P0 | 100 | bar |
| Accumulator working pressure | Pa | 180 | bar |
| Relief valve B cracking pressure | PB | 250 | bar |
| Pipe diameter | Dop | 100 | mm |
| Pipe length | Lop | 6 | m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Tao, Y.; Wei, L.; Zhan, P.; Yue, D. Analysis of Dynamic Characteristics of a 600 kW Storage Type Wind Turbine with Hybrid Hydraulic Transmission. Processes 2019, 7, 397. https://doi.org/10.3390/pr7070397
Liu Z, Tao Y, Wei L, Zhan P, Yue D. Analysis of Dynamic Characteristics of a 600 kW Storage Type Wind Turbine with Hybrid Hydraulic Transmission. Processes. 2019; 7(7):397. https://doi.org/10.3390/pr7070397
Chicago/Turabian StyleLiu, Zengguang, Yanhua Tao, Liejiang Wei, Peng Zhan, and Daling Yue. 2019. "Analysis of Dynamic Characteristics of a 600 kW Storage Type Wind Turbine with Hybrid Hydraulic Transmission" Processes 7, no. 7: 397. https://doi.org/10.3390/pr7070397
APA StyleLiu, Z., Tao, Y., Wei, L., Zhan, P., & Yue, D. (2019). Analysis of Dynamic Characteristics of a 600 kW Storage Type Wind Turbine with Hybrid Hydraulic Transmission. Processes, 7(7), 397. https://doi.org/10.3390/pr7070397