Feature Extraction Method for Hydraulic Pump Fault Signal Based on Improved Empirical Wavelet Transform




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
2.1. Feature Energy Ratio
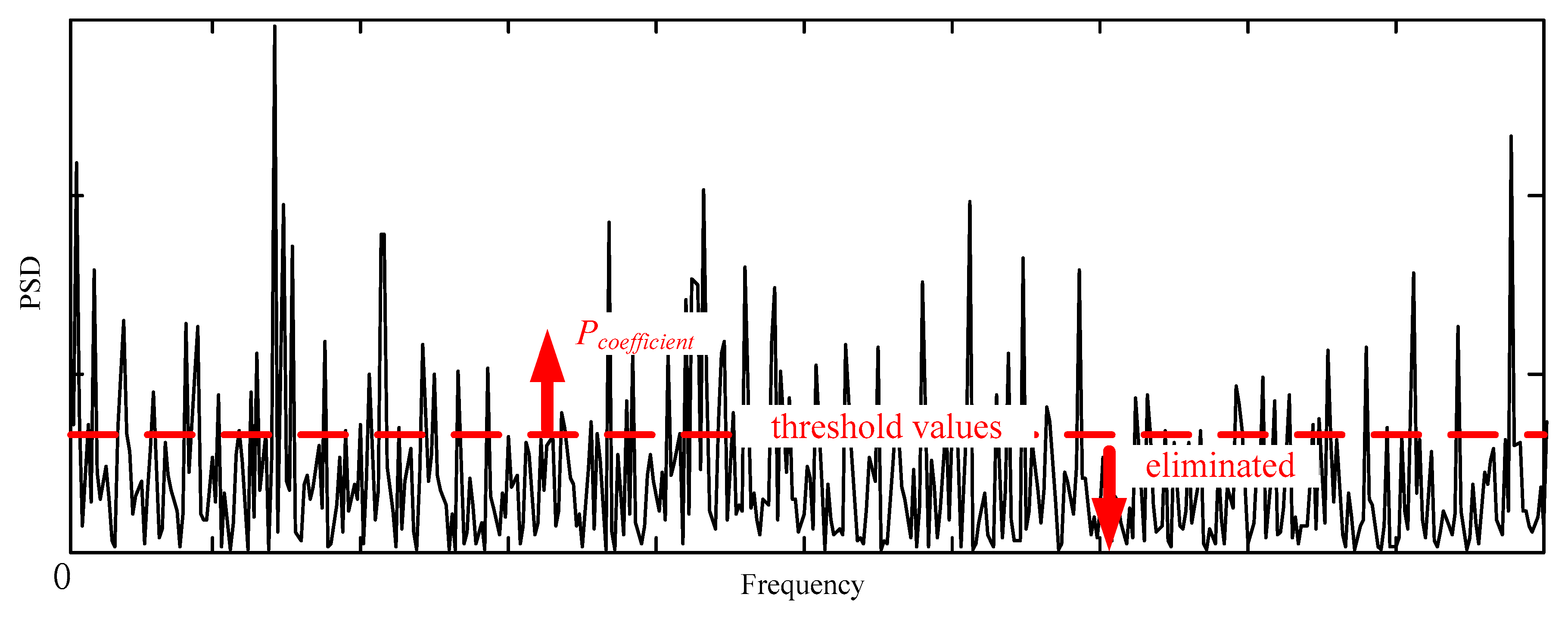
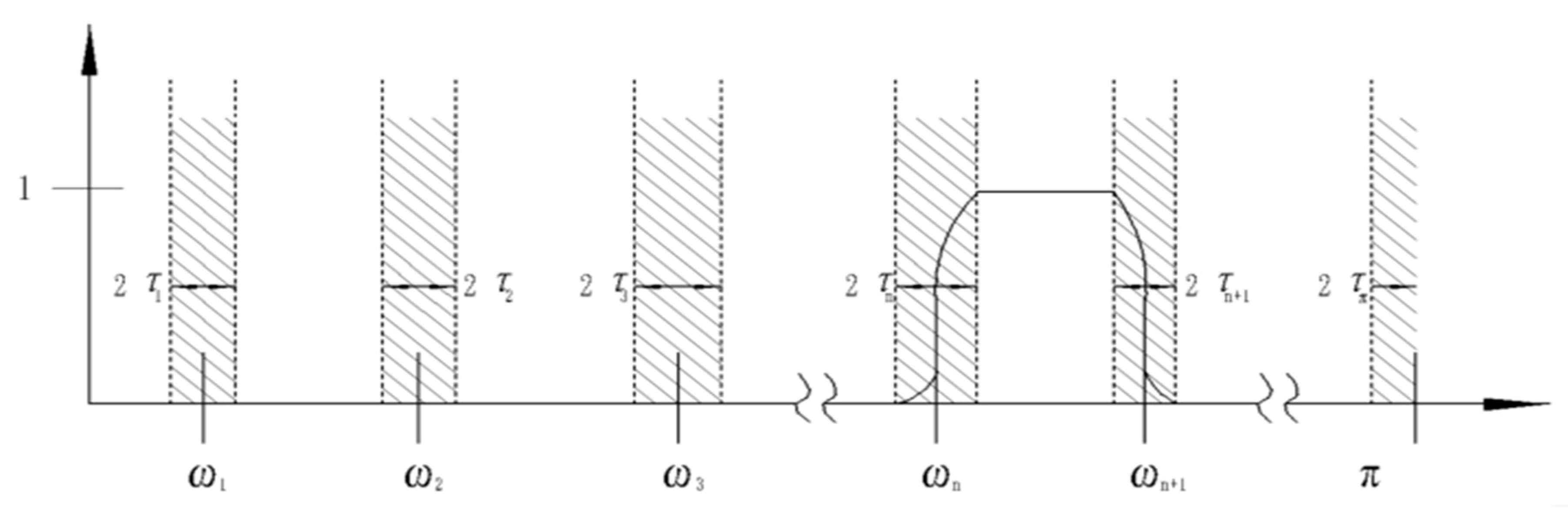
2.2. Improved Empirical Wavelet Transform
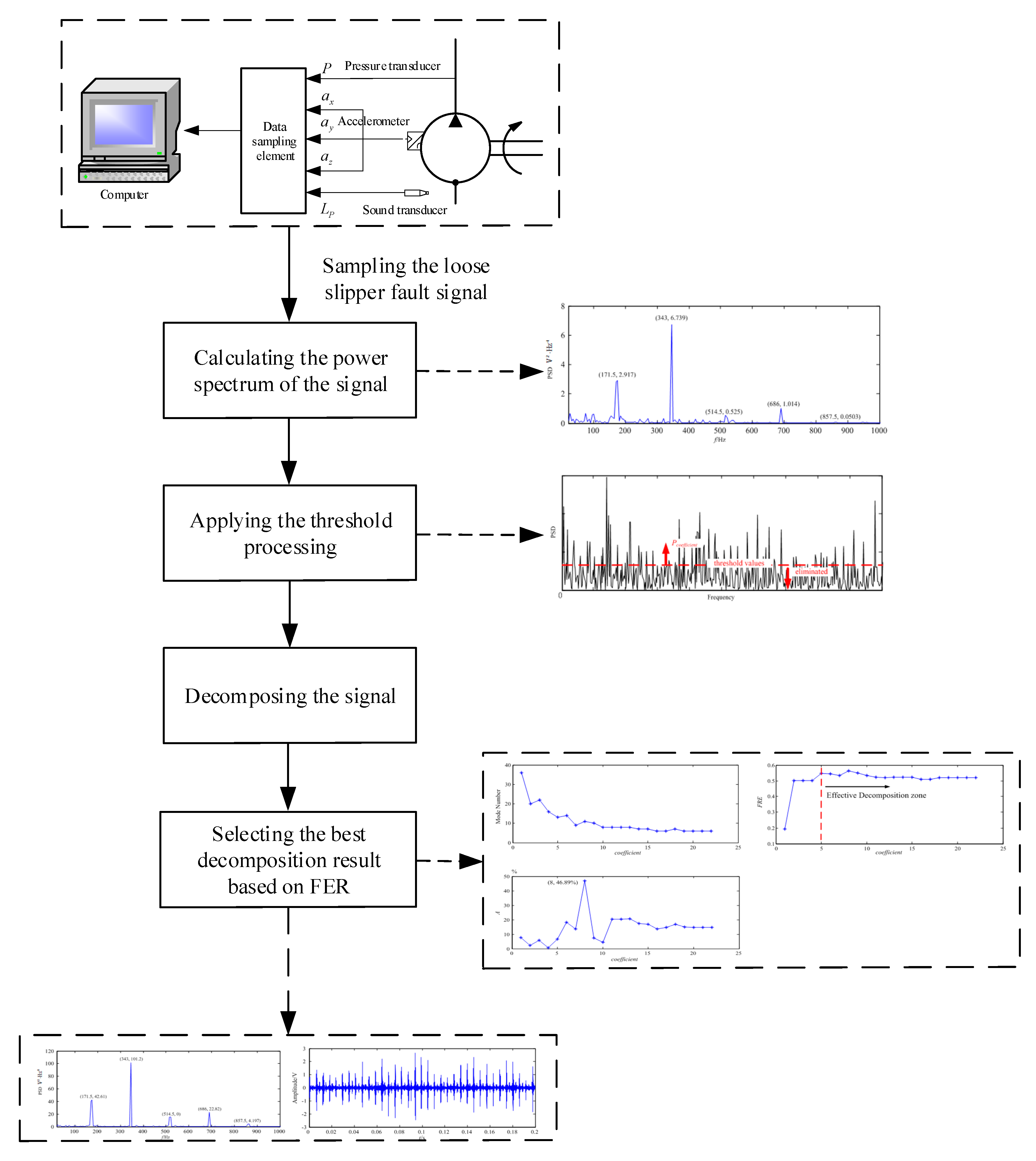
2.3. The Flowchart of IEWT
3. Results and Discussion
3.1. Simualtion Study
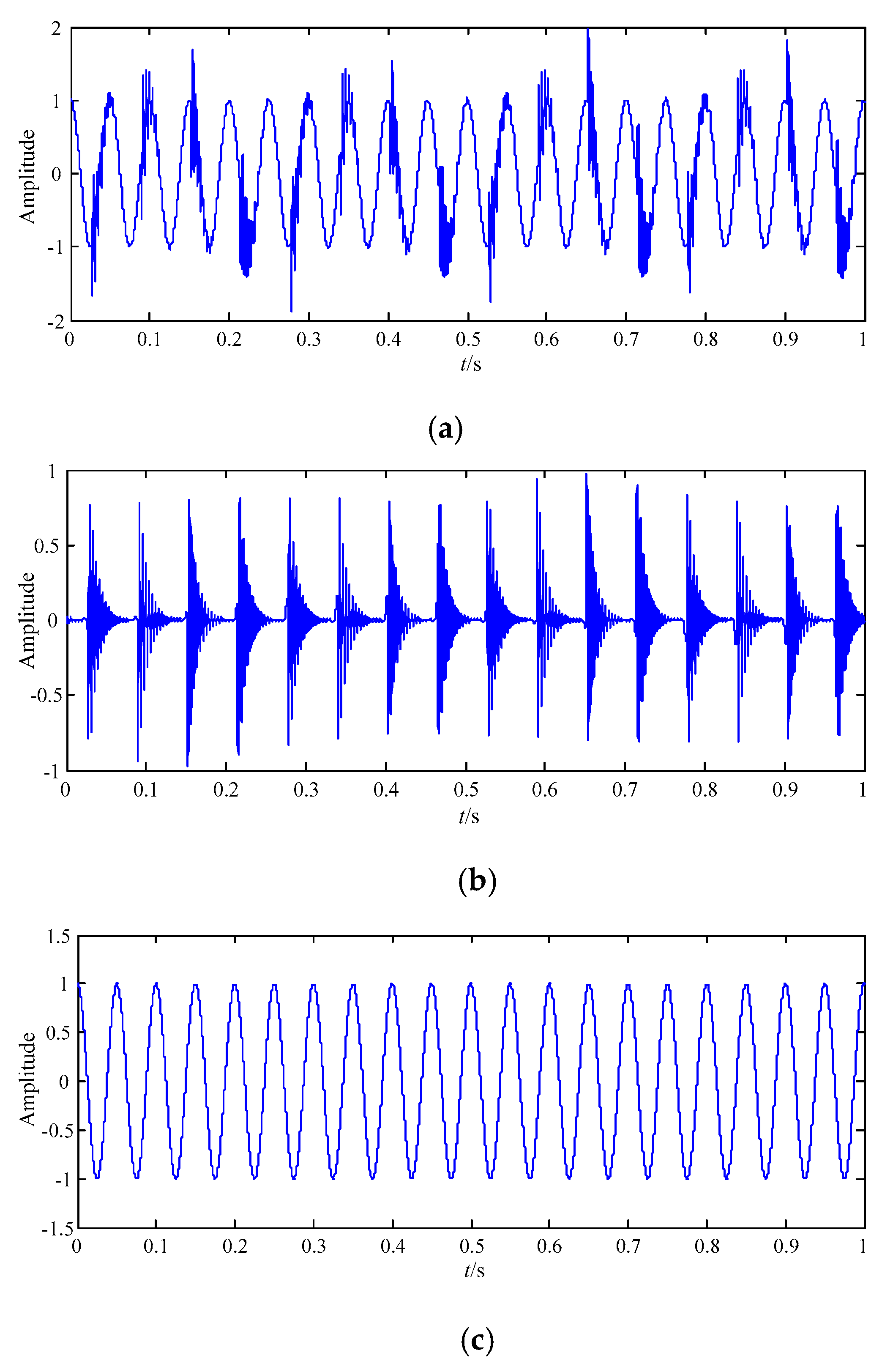
3.1.1. The Simulated Signal
3.1.2. The Simulated Result Analysis Based on EWT
3.1.3. The Simulated Result Analysis Based on IEWT
3.2. Application to Fault Signals of Hydraulic Pump
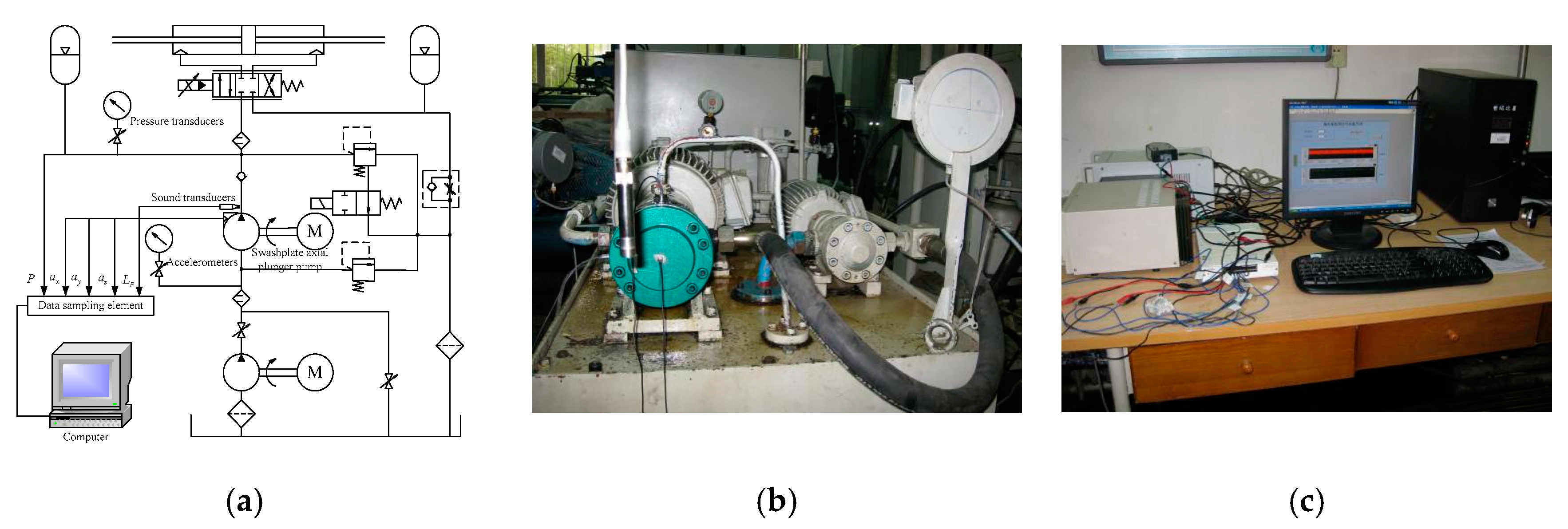
3.2.1. Experimental Scheme
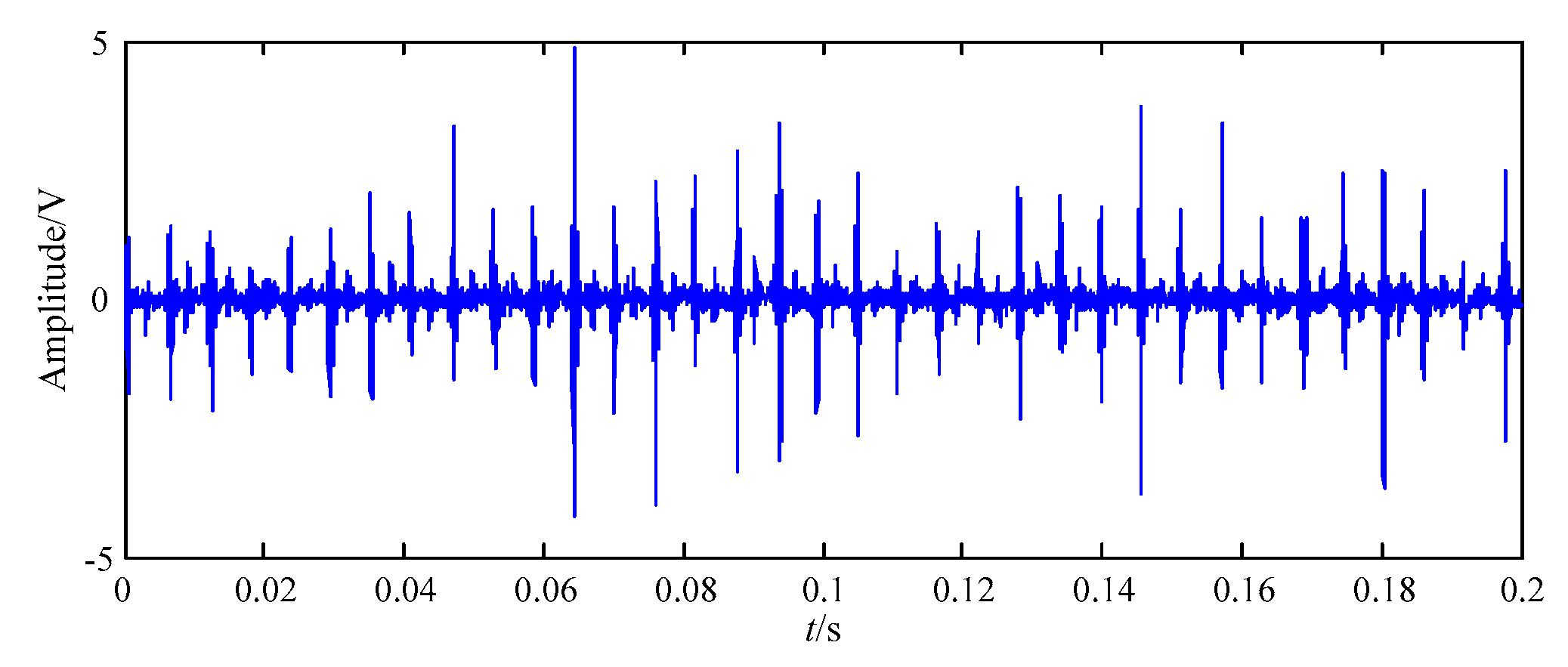
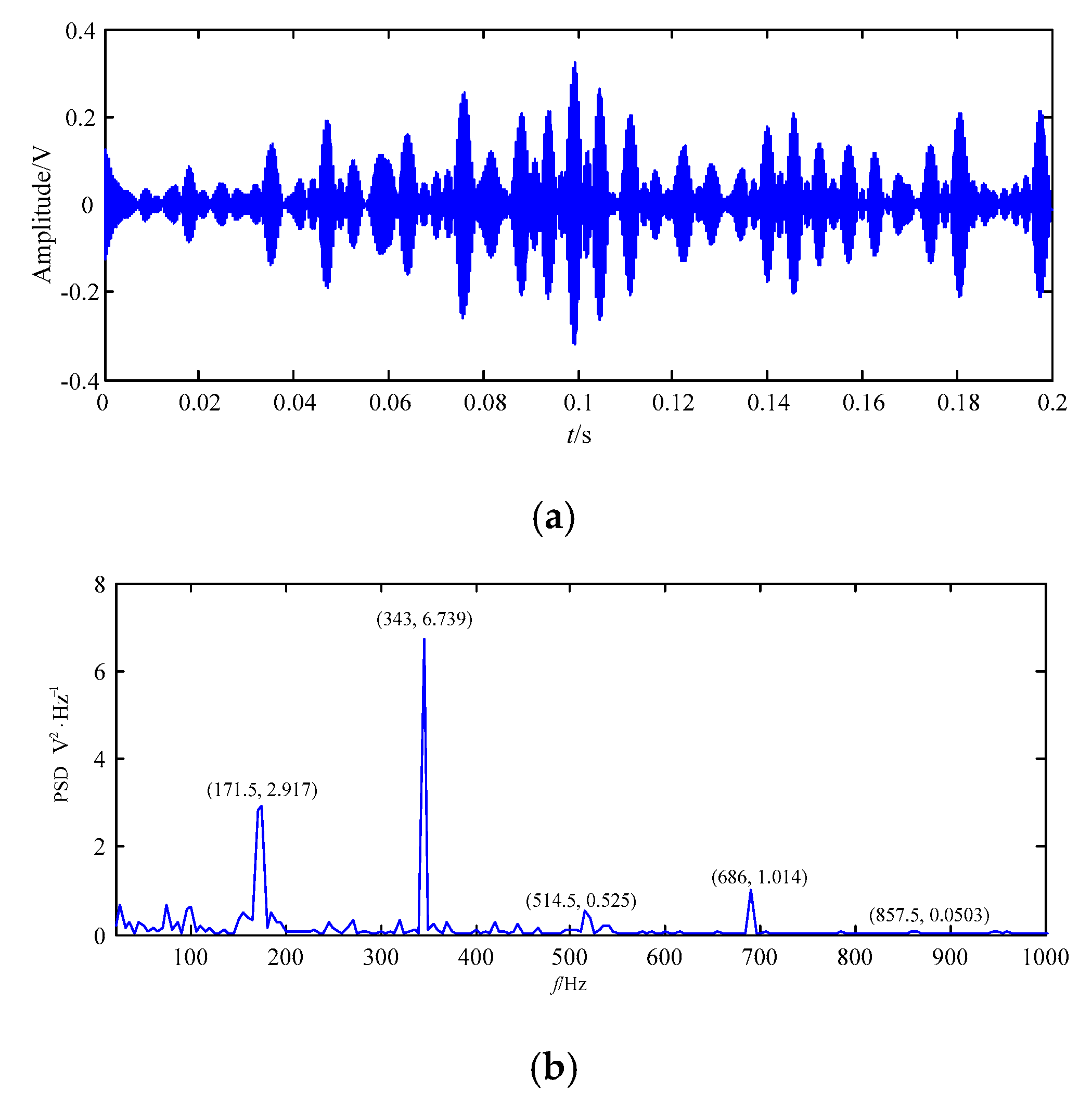
3.2.2. The Application to the Loose Slipper Fault Signal Based on EWT
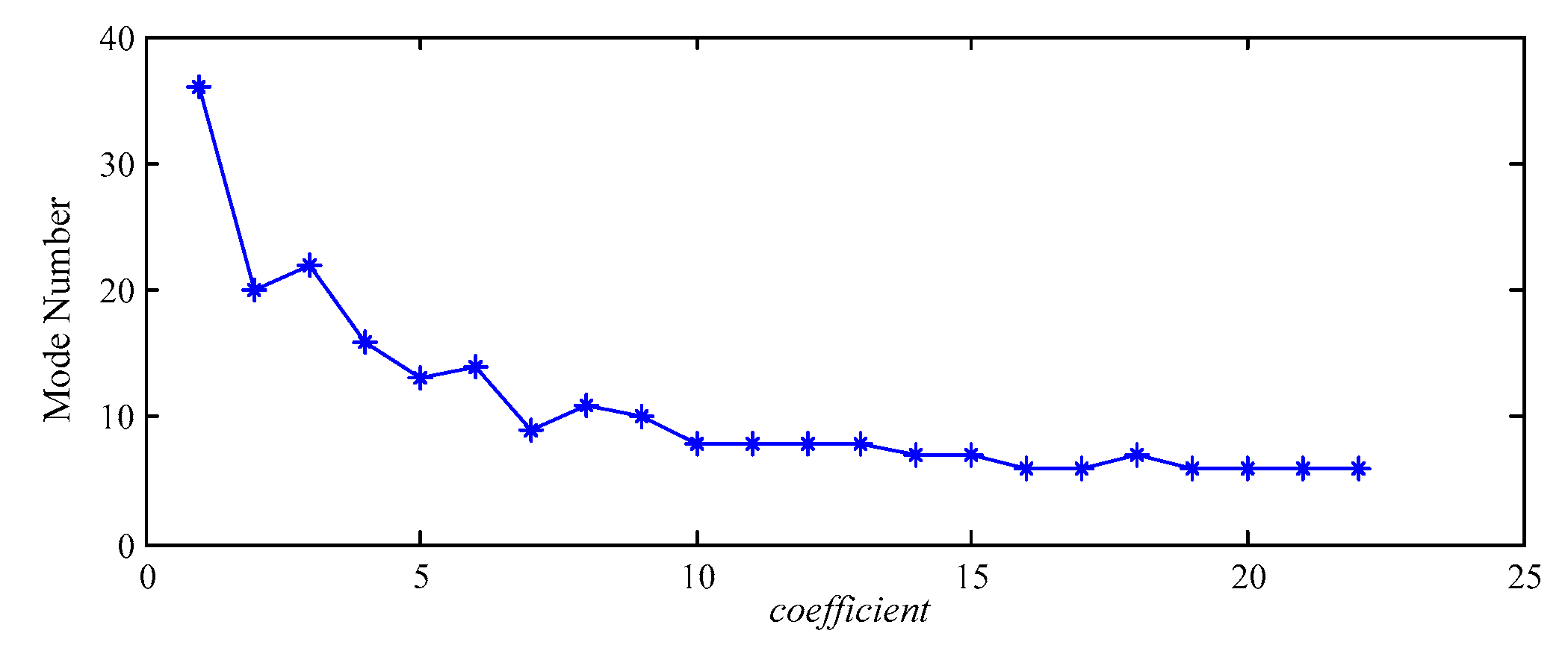
3.2.3. The Application to the Loose Slipper Fault Signal Based on IEWT
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| IEWT | improved empirical wavelet transform |
| EWT | empirical wavelet transform |
| FER | feature energy ratio |
| WT | wavelet transform |
| STFT | short-time Fourier transform |
| EEMD | ensemble empirical mode decomposition |
| SVR | support vector regression |
| CAFs | cyclic autocorrelation functions |
| WPT | wavelet packet transform |
| ELM | extreme learning machine |
| LMD | local mean decomposition |
| LTSA | local tangent space alignment |
| FFT | fast Fourier transform |
| IMF | intrinsic mode function |
| EMD | empirical mode decomposition |
| THVA | threshold value |
| Pcoefficient | a new spectrum distribution got after threshold processing |
| FERcoefficient, max | the biggest FER value in case of the coefficient in a decomposition result |
| FERcoefficient, secondmax | the second biggest FER value in case of the coefficient in a decomposition result |
| coefficient | an integer and equals to 1, 2, …, L |
| Acoefficient | comparison result between FERcoefficient, max and FERcoefficient, secondmax |
| Amax | maximum value of Acoefficient |
References
- Qian, J.Y.; Chen, M.R.; Liu, X.L.; Jin, Z.J. A numerical investigation of the flow of nanofluids through a micro Tesla valve. J. Zhejiang Univ. Sci. A 2019, 20, 50–60. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Gao, Z.-X.; Liu, B.-Z.; Jin, Z.-J. Parametric Study on Fluid Dynamics of Pilot-Control Angle Globe Valve. J. Fluids Eng. 2018, 140, 111103. [Google Scholar] [CrossRef]
- Zhu, Y.; Qian, P.; Tang, S.; Jiang, W.; Li, W.; Zhao, J. Amplitude-frequency characteristics analysis for vertical vibration of hydraulic AGC system under nonlinear action. AIP Adv. 2019, 9, 035019. [Google Scholar] [CrossRef]
- Zhu, Y.; Tang, S.; Quan, L.; Jiang, W.; Zhou, L. Extraction method for signal effective component based on extreme-point symmetric mode decomposition and Kullback–Leibler divergence. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 100. [Google Scholar] [CrossRef]
- Wang, C.; Chen, X.; Qiu, N.; Zhu, Y.; Shi, W. Numerical and experimental study on the pressure fluctuation, vibration, and noise of multistage pump with radial diffuser. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 481. [Google Scholar] [CrossRef]
- Wang, C.; Hu, B.; Zhu, Y.; Wang, X.; Luo, C.; Cheng, L. Numerical Study on the Gas-Water Two-Phase Flow in the Self-Priming Process of Self-Priming Centrifugal Pump. Processes 2019, 7, 330. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, S.; Ye, S.; Xu, B.; Song, W.; Zhu, S.; Tang, H.; Xiang, J. Experimental investigation on the noise reduction of an axial piston pump using free-layer damping material treatment. Appl. Acoust. 2018, 139, 1–7. [Google Scholar] [CrossRef]
- Ye, S.; Zhang, J.; Xu, B.; Zhu, S.; Xiang, J.; Tang, H. Theoretical investigation of the contributions of the excitation forces to the vibration of an axial piston pump. Mech. Syst. Signal Process. 2019, 129, 201–217. [Google Scholar] [CrossRef]
- Lan, Y.; Hu, J.; Huang, J.; Niu, L.; Zeng, X.; Xiong, X.; Wu, B. Fault diagnosis on slipper abrasion of axial piston pump based on Extreme Learning Machine. Measurement 2018, 124, 378–385. [Google Scholar] [CrossRef]
- Sun, H.; Yuan, S.; Luo, Y. Cyclic Spectral Analysis of Vibration Signals for Centrifugal Pump Fault Characterization. IEEE Sens. J. 2018, 18, 2925–2933. [Google Scholar] [CrossRef]
- Zhao, Z.; Jia, M.; Wang, F.; Wang, S. Intermittent chaos and sliding window symbol sequence statistics-based early fault diagnosis for hydraulic pump on hydraulic tube tester. Mech. Syst. Signal Process. 2009, 23, 1573–1585. [Google Scholar] [CrossRef]
- Du, J.; Wang, S.; Zhang, H. Layered clustering multi-fault diagnosis for hydraulic piston pump. Mech. Syst. Signal Process. 2013, 36, 487–504. [Google Scholar] [CrossRef]
- Lu, C.; Wang, S.; Makis, V. Fault severity recognition of aviation piston pump based on feature extraction of EEMD paving and optimized support vector regression model. Aerosp. Sci. Technol. 2017, 67, 105–117. [Google Scholar] [CrossRef]
- Sharma, P.; Newman, K.; Long, C.; Gasiewski, A.; Barnes, F. Use of wavelet transform to detect compensated and decompensated stages in the congestive heart failure patient. Biosensors 2017, 7, 40. [Google Scholar] [CrossRef]
- Zin, Z.M.; Salleh, S.H.; Daliman, S.; Sulaiman, M.D. Analysis of heart sounds based on continuous wavelet transform. In Proceedings of the IEEE Student Conference on Research and Development, Putrajaya, Malaysia, 25–26 August 2003. [Google Scholar]
- Tsalaile, T.; Sanei, S. Separation of heart sound signal from lung sound signal by adaptive line enhancement. In Proceedings of the European Signal Processing Conference, Poznan, Poland, 3–7 September 2007. [Google Scholar]
- El-Asir, B.; Khadra, L.; Al-Abbasi, A.H.; Mohammed, M.M.J. Time-frequency analysis of heart sounds. In Proceedings of the Digital Processing Applications (TENCON ′96), Perth, WA, Australia, 26–29 November 1996. [Google Scholar]
- Li, Y.; Liang, X.; Xu, M.; Huang, W. Early fault feature extraction of rolling bearing based on ICD and tunable Q-factor wavelet transform. Mech. Syst. Signal Process. 2017, 86, 204–223. [Google Scholar] [CrossRef]
- Singh, J.; Darpe, A.; Singh, S.; Singh, S. Rolling element bearing fault diagnosis based on Over-Complete rational dilation wavelet transform and auto-correlation of analytic energy operator. Mech. Syst. Signal Process. 2018, 100, 662–693. [Google Scholar] [CrossRef]
- Kordestani, M.; Samadi, M.F.; Saif, M.; Khorasani, K. A New Fault Diagnosis of Multifunctional Spoiler System Using Integrated Artificial Neural Network and Discrete Wavelet Transform Methods. IEEE Sens. J. 2018, 18, 4990–5001. [Google Scholar] [CrossRef]
- Zhao, M.; Kang, M.; Tang, B.; Pecht, M. Deep residual networks with dynamically weighted wavelet coefficients for fault diagnosis of planetary gearboxes. IEEE Trans. Ind. Electron. 2018, 65, 4290–4300. [Google Scholar] [CrossRef]
- Song, L.; Wang, H.; Chen, P. Vibration-Based Intelligent Fault Diagnosis for Roller Bearings in Low-Speed Rotating Machinery. IEEE Trans. Instrum. Meas. 2018, 67, 1887–1899. [Google Scholar] [CrossRef]
- Huang, N.E. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-stationary Time Series Analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Yang, W.; Court, R.; Tavner, P.J.; Crabtree, C.J. Bivariate empirical mode decomposition and its contribution to wind turbine condition monitoring. J. Sound Vib. 2011, 330, 3766–3782. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, J.; Cheng, Y.; Lu, C. Fault diagnosis of gearbox using empirical mode decomposition and multi-fractal detrended cross-correlation analysis. J. Sound Vib. 2016, 385, 350–371. [Google Scholar] [CrossRef]
- Osman, S.; Wang, W. An enhanced Hilbert–Huang transform technique for bearing condition monitoring. Meas. Sci. Technol. 2013, 24, 085004. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Liang, X.; Huang, W. Application of Bandwidth EMD and Adaptive Multiscale Morphology Analysis for Incipient Fault Diagnosis of Rolling Bearings. IEEE Trans. Ind. Electron. 2017, 64, 6506–6517. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, D.; Yang, J.; Liu, H.; Liu, X. Realizing the empirical mode decomposition by the adaptive stochastic resonance in a new periodical model and its application in bearing fault diagnosis. J. Mech. Sci. Technol. 2017, 31, 4599–4610. [Google Scholar] [CrossRef]
- Pan, H.; Yang, Y.; Li, X.; Zheng, J.; Cheng, J. Symplectic geometry mode decomposition and its application to rotating machinery compound fault diagnosis. Mech. Syst. Signal Process. 2019, 114, 189–211. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, Y.; Yi, C.; Tsui, K.-L.; Lin, J. Sparsity guided empirical wavelet transform for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2018, 101, 292–308. [Google Scholar] [CrossRef]
- Jiang, X.; Wu, L.; Ge, M. A Novel Faults Diagnosis Method for Rolling Element Bearings Based on EWT and Ambiguity Correlation Classifiers. Entropy 2017, 19, 231. [Google Scholar] [CrossRef]
- Cao, H.; Fan, F.; Zhou, K.; He, Z. Wheel-bearing fault diagnosis of trains using empirical wavelet transform. Measurement 2016, 82, 439–449. [Google Scholar] [CrossRef]
- Shen, L.; Zhou, X.; Zhang, W. Application of morphological demodulation in gear fault feature extraction. J. Zhejiang Univ. Eng. Sci. 2010, 44, 1514–1519. [Google Scholar]
- Jiang, W.; Zheng, Z.; Zhu, Y.; Li, Y. Demodulation for hydraulic pump fault signals based on local mean decomposition and improved adaptive multiscale morphology analysis. Mech. Syst. Signal Process. 2015, 58, 179–205. [Google Scholar] [CrossRef]
























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Z.; Wang, Z.; Zhu, Y.; Tang, S.; Wang, B. Feature Extraction Method for Hydraulic Pump Fault Signal Based on Improved Empirical Wavelet Transform. Processes 2019, 7, 824. https://doi.org/10.3390/pr7110824
Zheng Z, Wang Z, Zhu Y, Tang S, Wang B. Feature Extraction Method for Hydraulic Pump Fault Signal Based on Improved Empirical Wavelet Transform. Processes. 2019; 7(11):824. https://doi.org/10.3390/pr7110824
Chicago/Turabian StyleZheng, Zhi, Zhijun Wang, Yong Zhu, Shengnan Tang, and Baozhong Wang. 2019. "Feature Extraction Method for Hydraulic Pump Fault Signal Based on Improved Empirical Wavelet Transform" Processes 7, no. 11: 824. https://doi.org/10.3390/pr7110824
APA StyleZheng, Z., Wang, Z., Zhu, Y., Tang, S., & Wang, B. (2019). Feature Extraction Method for Hydraulic Pump Fault Signal Based on Improved Empirical Wavelet Transform. Processes, 7(11), 824. https://doi.org/10.3390/pr7110824