FFANN Optimization by ABC for Controlling a 2nd Order SISO System’s Output with a Desired Settling Time


Abstract
1. Introduction
2. The Feed Forward Artificial Neural Network (FFANN) Model
3. The Control System
4. Artificial Bee Colony (ABC) Algorithm
5. Parameter Optimization by ABC
- Initialize the population of solutions.
- Evaluate the population.
- cycle = 1
- repeat
- Produce new solution (food-source positions) in the neighborhood of for the employed bees using Equation (9).
- Apply the greedy selection process between and .
- Calculate the probability values of for the solutions by means of their fitness values, Equation (10).
- Produce the new solutions (new positions) for the onlookers from the solutions selected depending on and evaluate them.
- Apply the greedy selection process for the onlookers between and .
- Determine the abandoned solution (source), if exists, and replace it with a new randomly produced solution for the scout, Equation (8).
- Memorize the best food source position (solution) achieved so far.
- cycle = cycle + 1.
- until cycle = Maximum Cycle Number.
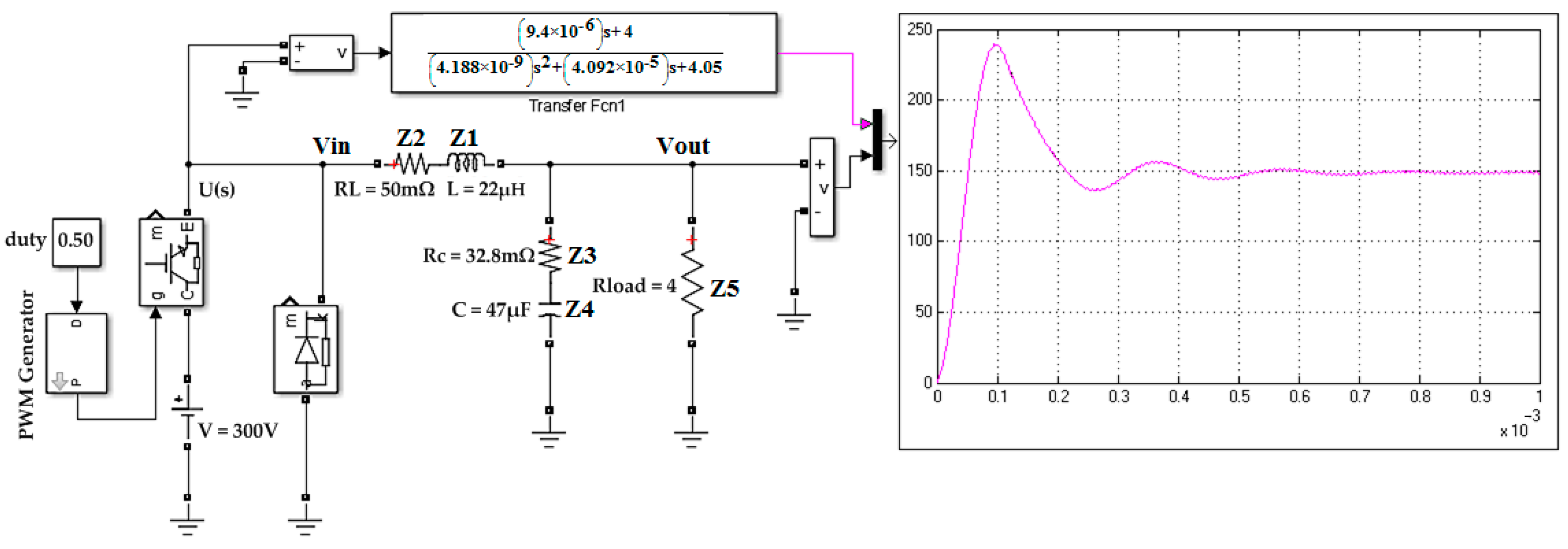
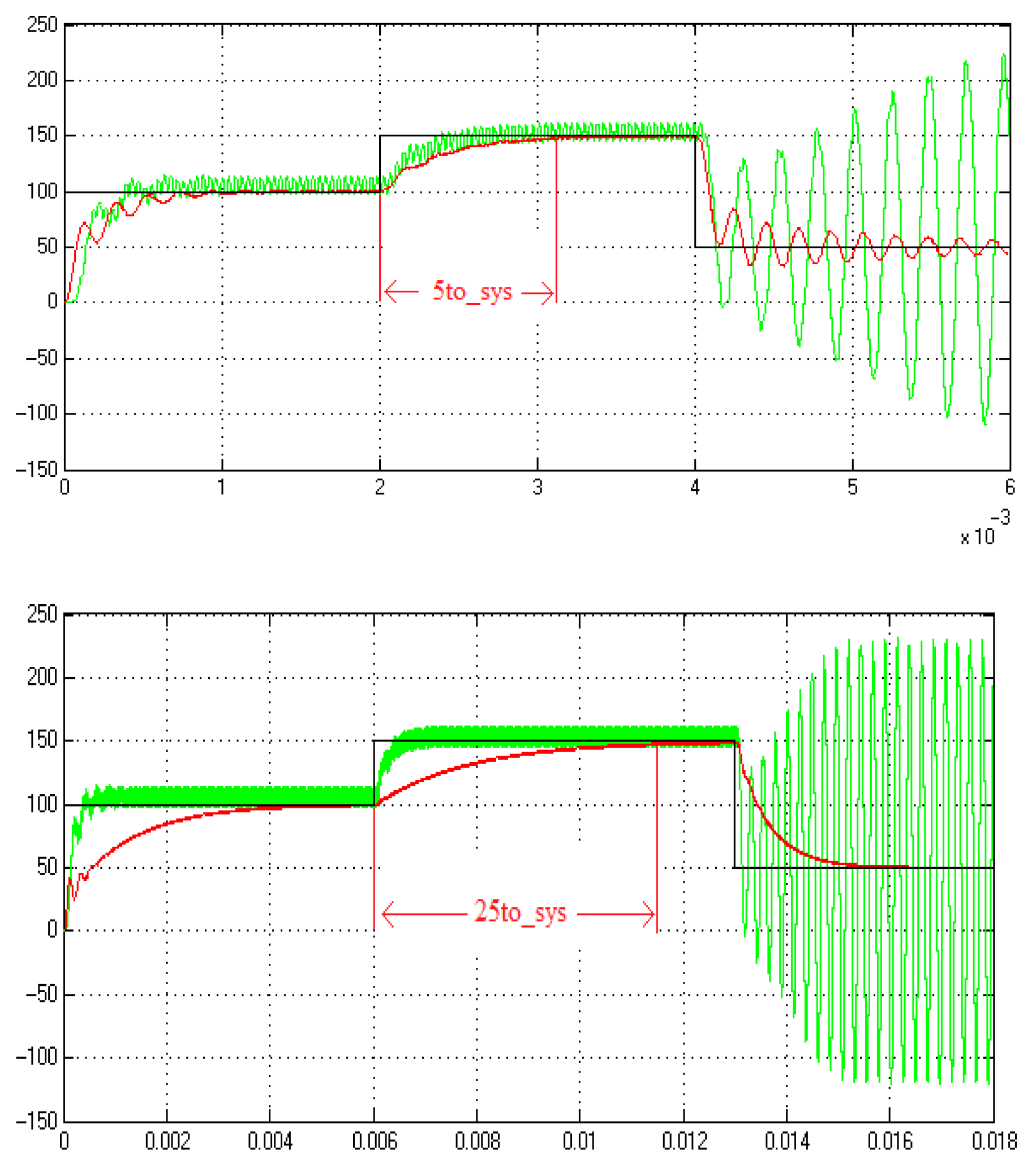
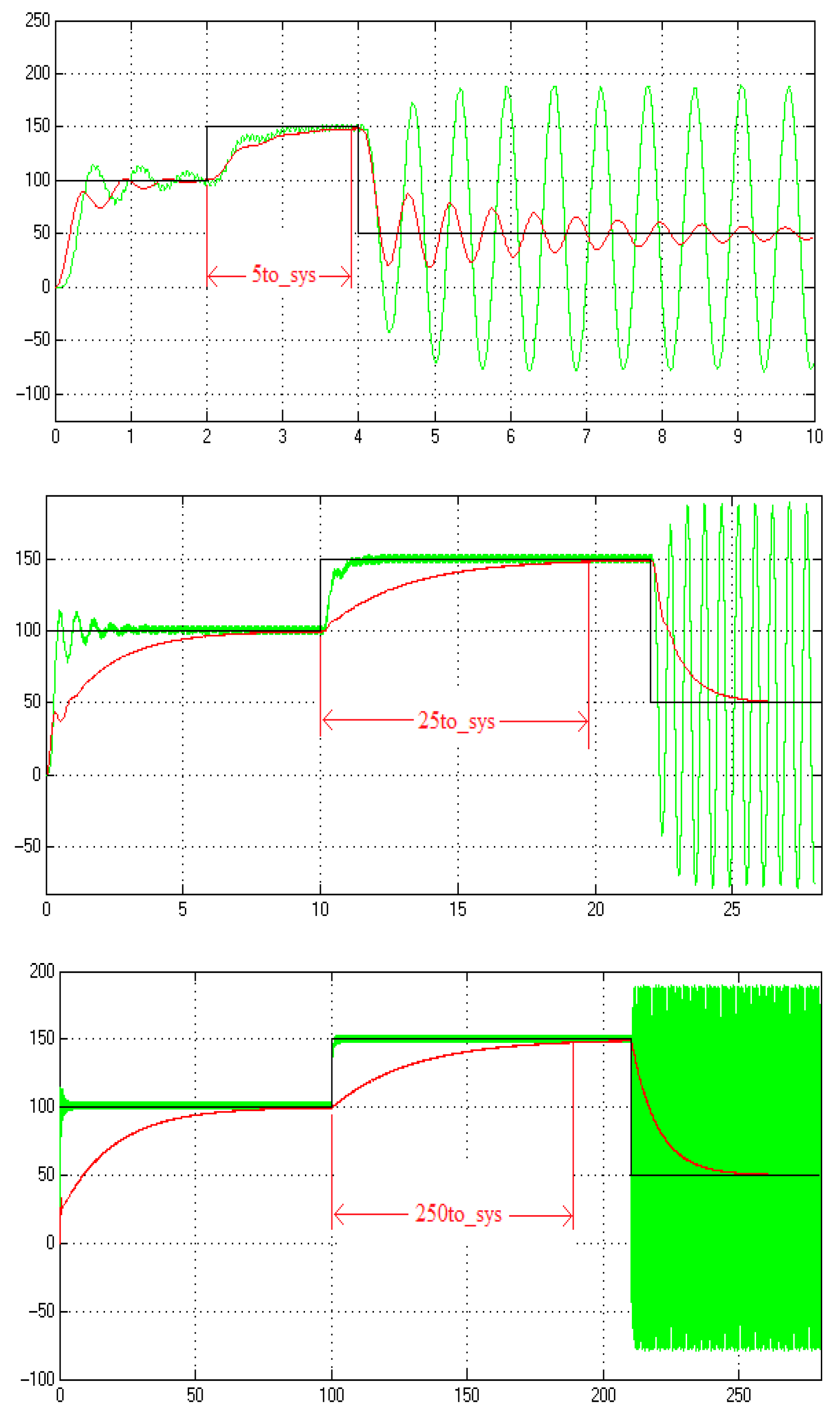
6. Control Simulations with Transfer Functions
- : Impedance of coil
- : Serial equivalent resistance of coil
- : Serial equivalent resistance of capacitor
- : Impedance of capacitor
- : Load resistance
- denotes.
7. Control Simulations with Power Electronics Components
8. Discussion
9. Conclusions
Funding
Conflicts of Interest
Appendix A
| %ABC optimization process for the system shown in Figure 2. |
| %Problem Definition |
| CostFunction = @(x) Run_Fig2(x); % first simulate Figure 3 to find out cost function |
| nVar = 4;% number of decision variables K1 for n1 2, K2 for µ1 2, K3 for Tsmpl, K4 for Kout |
| VarSize = [1 nVar];% decision variables matrix size |
| VarMin = 0.001; % decision variables lower bound |
| VarMax = 10000; %decision variables upper bound, chosen acording to τ |
| % ABC Settings |
| MaxIt = 40; % maximum number of iterations |
| nPop = 40; % population size (colony size) |
| nOnlooker = nPop; %number of onlooker bees |
| L = round(0.0025 × nVar × nPop); % abandonment limit parameter (trial limit) |
| H = 0.025; % acceleration coefficient upper bound |
| % Initialization |
| empty_bee.Position = []; |
| empty_bee.Cost = []; % empty bee structure |
| Pop = repmat(empty_bee,nPop,1); % ınitialize population array |
| BestSol.Cost = inf; % initialize best solution ever found |
| for i = 1:nPop % create initial population, start1 |
| pop(i).Position = unifrnd(VarMin,VarMax,VarSize); |
| pop(i).Cost = Run_Fig2 (pop(i).Position); |
| if pop(i).Cost <= BestSol.Cost |
| BestSol = pop(i); |
| end |
| end% create initial population, end1 |
| C = zeros(nPop,1); % abandonment counter |
| BestCost = zeros(MaxIt,1); % hold best cost values |
| % ABC Main Loop |
| for it = 1:MaxIt % abc main loop, start2 |
| for i= 1:nPop % recruited bees, start3 |
| % Choose k randomly, not equal to i |
| K = [1:i-1 i+1:nPop]; |
| K = K(randi([1 numel(K)])); |
| % Define Acceleration Coeff. |
| phi = h × unifrnd(−1,+1,VarSize); |
| % New Bee Position |
| newbee.Position = pop(i).Position+ |
| phi. × (pop(i).Position-pop(k).Position); |
| % Evaluation |
| newbee.Cost = Run_Fig2(newbee.Position); |
| % Comparision |
| if newbee.Cost <= pop(i).Cost |
| pop(i) = newbee; |
| else |
| C(i) = C(i)+1; |
| end |
| end % recruited bees, end3 |
| % Calculate Fitness Values and Selection Probabilities |
| F = zeros(nPop,1); |
| MeanCost = mean([pop.Cost]); |
| for i = 1:nPop % convert cost to fitness |
| F(i) = exp( −pop(i).Cost/MeanCost ); |
| end |
| P = F/sum(F); % probability calculation |
| for m = 1:nOnlooker % onlooker bees, start4 |
| % Select Source Site |
| i = RouletteWheelSelection(P); |
| % Choose k randomly, not equal to i |
| K = [1:i-1 i+1:nPop]; |
| k = K(randi([1 numel(K)])); |
| % Define Acceleration Coeff. |
| phi = h × unifrnd(−1,+1,VarSize); |
| % New Bee Position |
| newbee.Position= |
| pop(i).Position+phi. × (pop(i).Position-pop(k).Position); |
| % Evaluation |
| newbee.Cost = Run_Fig2 (newbee.Position); |
| % Comparision |
| if newbee.Cost <= pop(i).Cost |
| pop(i) = newbee; |
| else |
| C(i) = C(i)+1; |
| end |
| end % onlooker bees, end4 |
| for I = 1:nPop % scout bees |
| if C(i) >= L pop(i).Position = unifrnd(VarMin,VarMax,VarSize); |
| pop(i).Cost = Run_Fig2 (pop(i).Position); |
| C(i) = 0; |
| end |
| end |
| for I = 1:nPop % update best solution ever found |
| if pop(i).Cost <= BestSol.Cost |
| BestSol = pop(i); |
| end |
| end |
| % Store Best Cost Ever Found |
| BestCost(it) = BestSol.Cost; |
| end% abc main loop, stop2 |
| % Results |
| figure(1); |
| xlabel(‘Iteration’); |
| ylabel(‘Best Cost’); |
| plot(BestCost); |
| hold on; |
| grid on; |
| semilogy(BestCost, ‘LineWidth’,2); |
| K1=BestSol.Position(1) % n1 2 |
| K2=BestSol.Position(2) % µ1 2 |
| K3=BestSol.Position(3) % Tsample |
| K4=BestSol.Position(4) % Kout |
| Inside the algorithm it is used “Roulette Wheel Selection” function that is described below. |
| function i = RouletteWheelSelection (P) |
| r = rand; |
| C = cumsum(P); |
| i=find(r <= C,1,‘first’); |
| end |
References
- Gholipour, R.; Khosravi, A.; Mojallali, H. Multi-objective optimal backstepping controller design for chaos control in a rod-type plasma torch system using Bees algorithm. Appl. Math. Modell. 2015, 39, 4432–4444. [Google Scholar] [CrossRef]
- Sekhar, G.C.; Sahu, R.K.; Baliarsingh, A.K.; Panda, S. Load frequency control of power system under deregulated environment using optimal firefly algorithm. Int. J. Electr. Power Energy Syst. 2016, 74, 195–211. [Google Scholar] [CrossRef]
- Veysi, M.; Soltanpour, M.R.; Khooban, M.H. A novel self-adaptive modified bat fuzzy sliding mode control of robot manipulator in presence of uncertainties in task space. ROBOTICA 2015, 33, 2045–2064. [Google Scholar] [CrossRef]
- Liang, Y.C.; Cuevas Juarez, J.R. A novel metaheuristic for continuous optimization problems: Virus optimization algorithm. Eng. Optim. 2016, 48, 73–93. [Google Scholar] [CrossRef]
- Kose, E.; Abaci, K.; Kizmaz, H.; Aksoy, S.; Yalçin, M.A. Sliding mode control based on genetic algorithm for WSCC systems include of SVC. Elektron. Elektrotech. 2013, 19, 25–28. [Google Scholar] [CrossRef]
- Sekhar, P.; Mohanty, S. An enhanced cuckoo search algorithm based contingency constrained economic load dispatch for security enhancement. Int. J. Electr. Power Energy Syst. 2016, 75, 303–310. [Google Scholar] [CrossRef]
- Moharam, A.; El-Hosseini, M.A.; Ali, H.A. Design of optimal PID controller using hybrid differential evolution and particle swarm optimization with an aging leader and challengers. Appl. Soft Comput. 2016, 38, 727–737. [Google Scholar] [CrossRef]
- Das, S.; Chatterjee, D.; Goswami, S.K. A Gravitational Search Algorithm Based Static VAR Compensator Switching Function Optimization Technique for Minimum Harmonic Injection. Electr. Power Compon. Syst. 2015, 43, 2297–2310. [Google Scholar] [CrossRef]
- Kumar, A.R.; Premalatha, L. Optimal power flow for a deregulated power system using adaptive real coded biogeography-based optimization. Int. J. Electr. Power Energy Syst. 2015, 73, 393–399. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Hallworth, M.; Shirsavar, S.A. Microcontroller based peak current mode control using digital slope compensation. IEEE Trans. Power Electron. 2012, 27, 3340–3351. [Google Scholar] [CrossRef]
- Aksoy, S.; Mühürcü, A. PI Elman neural network based nonlinear state estimation for induction motors. IREE 2011, 6, 706–718. [Google Scholar]
- Okan, E.; Mahmut, Ö.; Nejat, Y. Impact of small-world topology on the performance of a feed-forward articial neural network based on 2 different real-life problems. Turk. J. Elect. Eng. Comp Sci. 2014, 22, 708–718. [Google Scholar]
- Beg, M.A.; Khedkar, M.K.; Paraskar, S.R.; Dhole, G.M. Feed-forward Artificial Neural Network–Discrete Wavelet Transform Approach to Classify Power System Transients. Electr. Power Compon. Syst. 2013, 41, 586–604. [Google Scholar] [CrossRef]
- Kermani, M.Z.; Kisi, O.; Rajaee, T. Performance of radial basis and LM-feed forward artificial neural networks for predicting daily watershed runoff. Appl. Soft Comput. 2013, 13, 4633–4644. [Google Scholar] [CrossRef]
- Nabiyev, V. Yapay Zeka, 1st ed.; Seçkin: Istanbul, Turkey, 2012. [Google Scholar]
- Nourmohammadzadeh, A.; Hartmann, S. Fault Classification of a Centrifugal Pump in Normal and Noisy Environment with Artificial Neural Network and Support Vector Machine Enhanced by a Genetic Algorithm. In International Conference on Theory and Practice of Natural Computing; Springer: Cham, Switzerland, 2015; pp. 58–70. [Google Scholar]
- Yu, Y.; Li, Y.; Li, J. Nonparametric modeling of magneto rheological elastomeric base isolator based on artificial neural network optimized by ant colony algorithm. J. Intell. Mater. Syst. Struct. Rep. 2015, 26. [Google Scholar] [CrossRef]
- Zhu, C.; Zhao, X.; Zhou, J. ANN based on PSO for Surface Water Quality Evaluation Model and Its Application. Chin. Control Decision Conf. Rep. 2009, 6, 3264. [Google Scholar] [CrossRef]
- Chang, J.; Xu, X. Applying Neural Network with Particle Swarm Optimization for Energy Requirement Prediction. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008. [Google Scholar]
- Ma, L.; Lee, K.Y.; Ge, G. An Improved Predictive Optimal Controller with Elastic Search Space for Steam Temperature Control of Large-Scale Supercritical Power Unit. In Proceedings of the 51st IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012. [Google Scholar]
- Deepa, P.; Sivakumar, R. Synthesis of Heuristic Control Strategies for Liquid Level Control in Spherical Tank. In Proceedings of the 3rd International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics, Chennai, India, 27–28 February 2017. [Google Scholar]
- Ma, L.; Cao, P.; Gao, Z.; Lee, K.Y. ANN and PSO Based Intelligent Model Predictive Optimal Control for Large-Scale Supercritical Power Unit. In Proceedings of the 2016 IEEE International Conference on Information and Automation, Ningbo, China, 1–3 August 2016. [Google Scholar]
- Lin, X.; Li, A.; Zhang, W. Application of PSO-based ANN in Knowledge Acquisition for the Selection of Optimal Milling Parameters. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006. [Google Scholar]
- Ayan, K.; Kılıç, U. Artificial bee colony algorithm solution for optimal reactive power flow. Appl. Soft Comput. Rep. 2012, 12, 1477. [Google Scholar] [CrossRef]
- Wani, S.M.A. Comparative study of back propagation learning algorithms for neural networks. Int. J. Res. Comput. Commun. Eng. 2013, 3, 1151–1156. [Google Scholar]
- Smola, A.; Vishwanathan, S.V.N. Introduction to Machine Learning, 1st ed.; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Kose, E.; Muhurcu, A. The control of a non-linear chaotic system using genetic and particle swarm based on optimization algorithms. Int. J. Intell. Syst. Appl. Eng. 2016, 4, 145–149. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Computers Engineering Department, Engineering Faculty, Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equation | L (µH) | Rl (mohm) | C (µF) | Rc (mohm) | Rload (ohm) |
|---|---|---|---|---|---|
| 6.4 | 1 | 50 | 1 | 6.6 | 25 |
| 6.5 | 22 | 50 | 47 | 32.8 | 4 |
| 6.6 | 2200 | 50 | 3300 | 327.9 | 50 |
| T. Functions | Simulation Time | Iteration |
|---|---|---|
| T1(s) | ts1 × 5 | 100 |
| T2(s) | ts2 × 5 | 100 |
| T3(s) | ts3 × 5 | 100 |
| Setling Time | n1, n2 | µ1, µ2 | Kout | Tsample |
|---|---|---|---|---|
| 5τ | 0.0018 | 0.038 | 4725 | 286 ns |
| 25τ | 0.0022 | 0.052 | 4455 | 1.36 µs |
| 250τ | 0.0012 | 0.027 | 4275 | 12.584 µs |
| 10,000τ | 0.0033 | 0.041 | 3825 | 572.16 µs |
| Setling Time | n1, n2 | µ1, µ2 | Kout | Tsample |
|---|---|---|---|---|
| 5τ | 0.0011 | 0.029 | 4630 | 4.094 µs |
| 25τ | 0.0034 | 0.024 | 4316 | 20.47 µs |
| 250τ | 0.0016 | 0.028 | 3804 | 198.7 µs |
| 10,000τ | 0.0027 | 0.033 | 3710 | 8.26 ms |
| Setling Time | n1, n2 | µ1, µ2 | Kout | Tsample |
|---|---|---|---|---|
| 5τ | 0.0021 | 0.027 | 4722 | 6.6 ms |
| 25τ | 0.0024 | 0.021 | 4386 | 32.8 ms |
| 250τ | 0.0019 | 0.034 | 3854 | 319 ms |
| 10,000τ | 0.0031 | 0.028 | 3635 | 13.11 s |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mühürcü, A. FFANN Optimization by ABC for Controlling a 2nd Order SISO System’s Output with a Desired Settling Time. Processes 2019, 7, 4. https://doi.org/10.3390/pr7010004
Mühürcü A. FFANN Optimization by ABC for Controlling a 2nd Order SISO System’s Output with a Desired Settling Time. Processes. 2019; 7(1):4. https://doi.org/10.3390/pr7010004
Chicago/Turabian StyleMühürcü, Aydın. 2019. "FFANN Optimization by ABC for Controlling a 2nd Order SISO System’s Output with a Desired Settling Time" Processes 7, no. 1: 4. https://doi.org/10.3390/pr7010004
APA StyleMühürcü, A. (2019). FFANN Optimization by ABC for Controlling a 2nd Order SISO System’s Output with a Desired Settling Time. Processes, 7(1), 4. https://doi.org/10.3390/pr7010004