2.1. Dispatching Center Optimization Model
In this study, the model focuses exclusively on the active power dispatch and its corresponding feasible region under fixed electricity prices. Reactive power balance and voltage constraints are not explicitly modeled, and all prices are assumed constant over the dispatch horizon. This simplification allows us to isolate the geometric and computational aspects of feasible region learning without entanglement with market dynamics or AC power flow effects.
Generally, the dispatching center model aims at achieving optimal economic efficiency for the entire grid, which can be formulated as follows:
subject to the following:
whereas
,
and
are the output pf thermal power units in the main grid, the curtailed wind power and solar power, respectively,
,
and
are the cost coefficients for the output of thermal power units and the penalty cost coefficients for abandoning wind and solar, respectively,
is the operational cost of VPP,
,
, are actual wind power output and solar power output, respectively,
,
and
are incidence matrices between units, wind farms, solar power plants and nodes,
is the node demand at node
r,
is the net injected power at node
r,
is the conductance matrix between node
i and branch
j,
is the phase angle at node
r, and
is the binary variable representing the on-off status of the thermal power units.
Constraint (
2) is the nodal power balance constraint, (
3) is the power flow constraint, (
4) is the upper and lower limit constraint for the active power output of the units, (
5) and (
6) are the ramping constraints for the units, and (
7) to (
10) are the minimum start-up and shut-down time constraints for the units. Due to the presence of binary variables and constraints (
4) to (
8), the problem becomes a mixed-integer linear programming (MILP) problem, and its solution time increases significantly with the scale of the problem. Therefore, how to accelerate the solution process for the clearing problem of virtual market participation in the electricity market is the focus of this paper.
2.2. VPP Operation and Dispatch Model
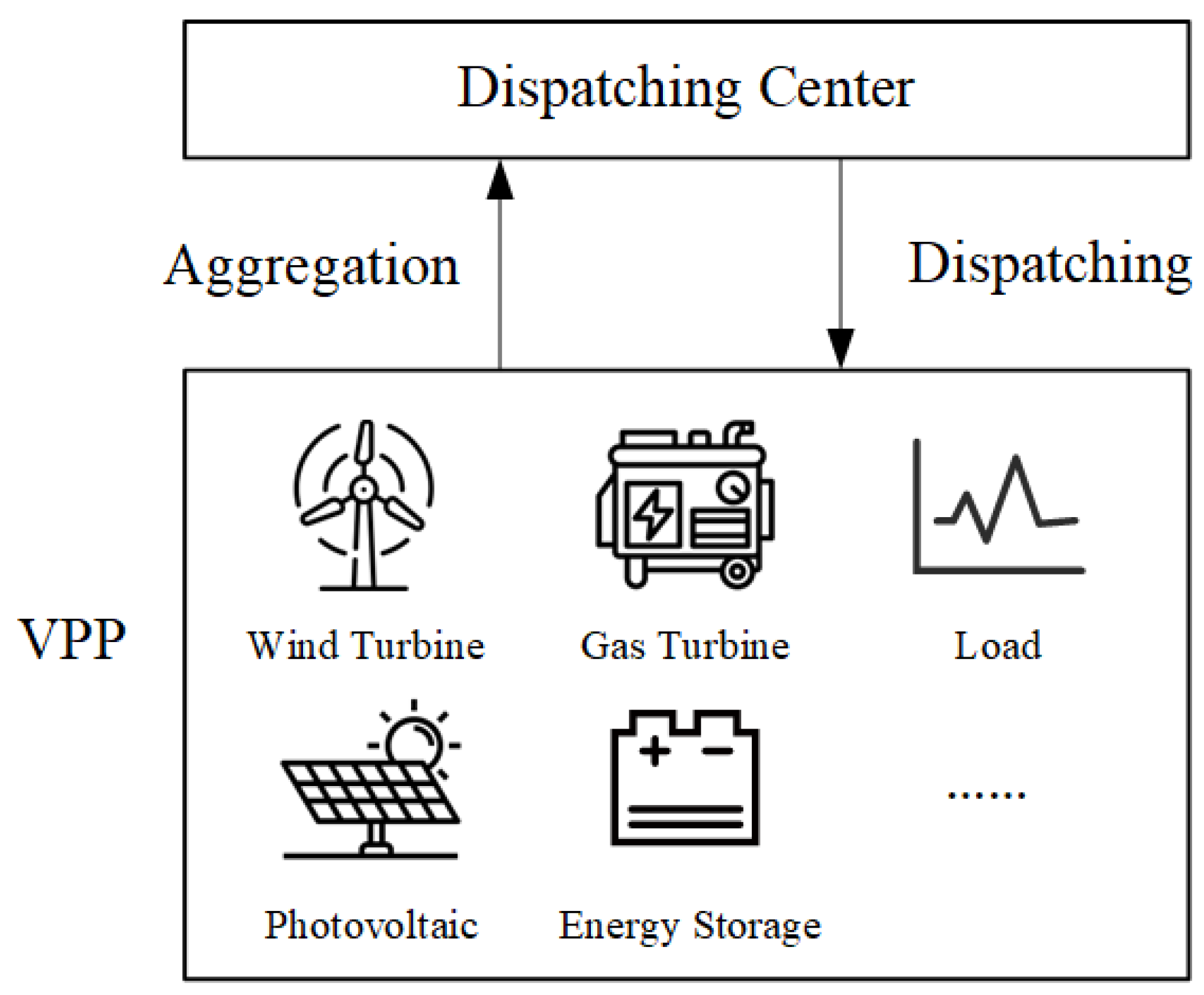
The VPP aggregates a large number of DERs in the distribution network, such as photovoltaic systems, wind power, and controllable units, as shown in
Figure 2. It calculates its operation feasible region and reports it to the dispatching center.
The operation feasible region refers to the adjustable range of coordination variables—specifically, the exchanged active power and submitted prices at the VPP boundary nodes—that do not violate internal operational constraints.
Coordination variables are defined as the interface quantities through which a VPP interacts with the main grid, typically including boundary active power injection and the associated price at each scheduling period. These variables are visible to the dispatch center and form the input to system-level optimization.
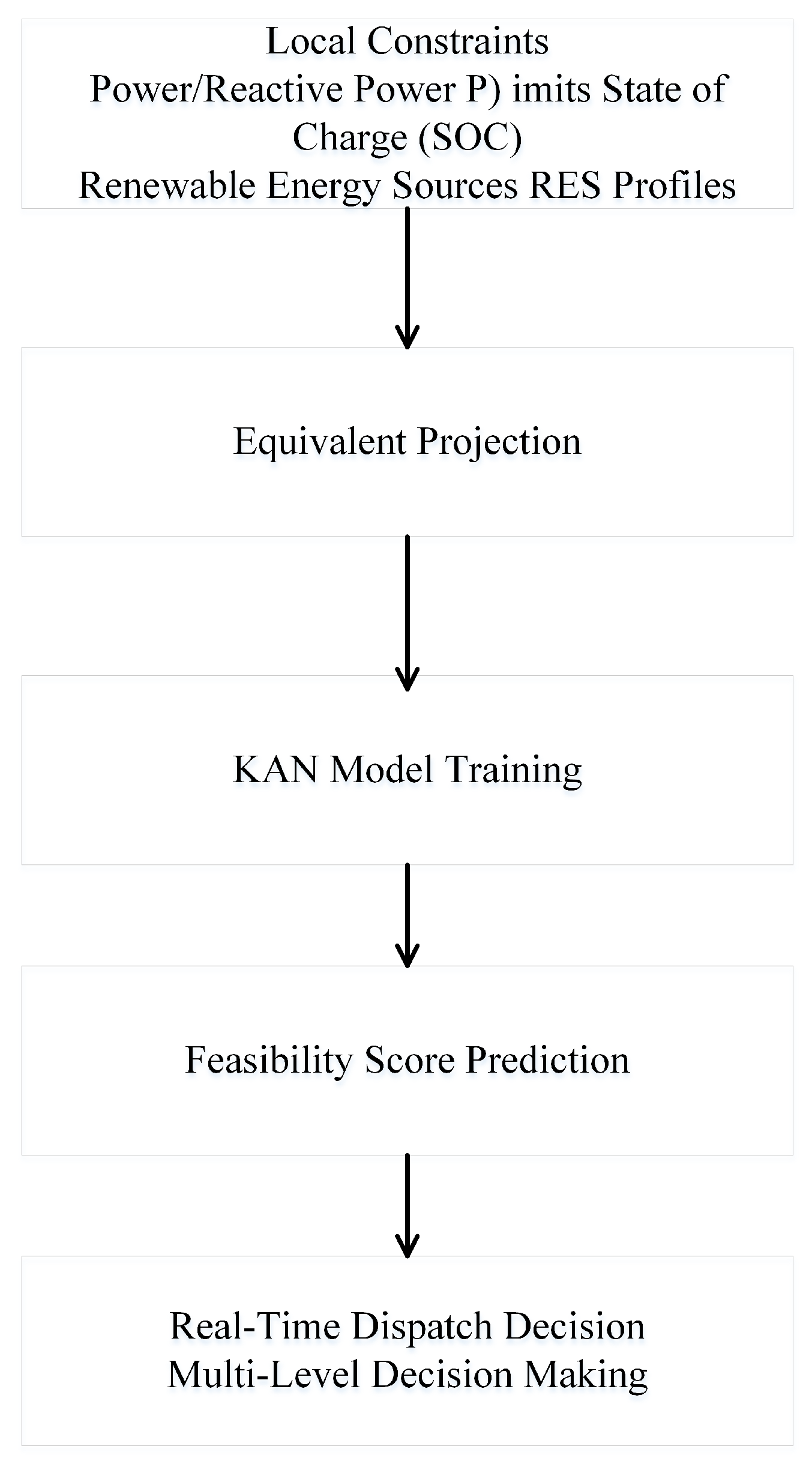
Equivalent projection refers to the process of projecting the high-dimensional internal constraints of the VPP onto the low-dimensional space of coordination variables. This transformation allows the VPP to submit only its boundary feasible region (as a function of coordination variables), thereby enabling centralized scheduling without revealing detailed internal models or solving the full optimization problem online.
Essentially, the VPP dispatch boundary is a dimensionality-reduced mapping of the high-dimensional feasible region of the VPP dispatch model onto the space of boundary node coupling variables. This means that for any point within the feasible region, the VPP can determine a dispatch decision set that does not violate its steady-state constraints.
The VPP submits its operation feasible region to the dispatch center, which then makes optimal dispatch decisions based on this feasible region. After the dispatch center delivers dispatch commands to the VPP, the VPP executes the final decision-making calculations.
By using the equivalent projection method to aggregate massive DERs and requiring the VPP to submit only its operation feasible region information, data privacy of the VPP can be effectively protected.
Typically, the objective function and constraints of the VPP can be expressed as follows.
subject to the following:
where
N and
E are the node set and branch set of a VPP, respectively;
and
are active power and reactive power injected into the VPP node at the moment
t, respectively;
and
are the active power and reactive power output of the adjustable unit of the VPP at the moment
t, respectively;
and
are the prediction of the active power and reactive power output of the distributed renewable energy at time
t, wherein this paper sets the distributed renewable energy to operate in the mode of constant power factor, namely, the reactive power of the new energy
(
is the constant power factor vector of the new energy);
and
are the active power demand and reactive power demand at time
t, respectively;
is the exchange active power at time
t at boundary nodes of the VPP;
and
are the active power and reactive power on the internal branch of the VPP at time
t, respectively;
,
,
and
are the incidence matrices of adjustable units, distributed new energy units, loads, and virtual power plant gateway nodes and each node, respectively.
is the square of the voltage amplitude of the node
i at time
t,
and
is the resistance and reactance of the branch
, and
,
and
are the active power flow, reactive power flow, and the square of the current amplitude of the branch
at time
t, respectively.
Considering that the long-distance transmission of reactive power in the power grid will affect the voltage quality and lead to the increase of active loss, and the reactive power of the grid often adopts the method of in situ equilibrium, this paper studies the mode of exchanging active power between the boundary nodes of the virtual power plant and the main network, and does not consider the reactive power exchange for the time being, and the coupling variable of the virtual power plant is the exchange of active power at the boundary node. The multi-time scheduling of virtual power plants needs to meet the constraints of node power balance (
12) and (
13), branch power flow constraints (
14) and (
15), system state variable constraints (
16) to (
18), and constraints of the upper and lower output limits of adjustable units (
19) and (
20).
Since this paper does not consider time-coupled constraints of VPP (such as ramping constraints and energy storage constraints), the VPP’s dispatch optimization problem falls into the category of linear programming problems, which can be solved relatively quickly.
Whether using centralized or distributed algorithms, the dispatch center needs to perform coordinated optimization calculations, which increases the problem scale and solution time. In contrast, the equivalent projection method avoids the joint optimization solving between the virtual power plant and the main grid, thereby improving computational efficiency.
Define two types of variables related to the operational scheduling of VPPs:
Coupling variables : The exchanged active power and quotation at the boundary nodes of the VPP in each time period, namely,
.
These variables can be derived from the optimal scheduling of the main network (
1) to (
10), and are fixed as the boundary condition of the optimization decision of the VPP.
Internal variables
:
. For the fixed coupling variables
, the internal variables
can be determined by the VPP’s self-scheduling optimization, namely, given
, the internal variables
can be obtained by solving (
11) to (
20).
Define the feasible operating range of variables that satisfy the constraints of Equations (
2)–(
8) for the multi-period scheduling of VPPs as
, and the multi-period scheduling boundary of VPPs as
. For any coupling variable value
w on the multi-period scheduling boundary
, there exists a set of feasible control and state variables
that satisfy the feasible operating range of variables, namely Equation (
21):
To elaborate on the transformation, the equivalent projection method reduces the original bi-level optimization model into a tractable single-level formulation. Specifically, given a fixed set of boundary (coupling) variables , the internal VPP optimization problem (Equations (11)–(20)) can be solved independently to obtain feasible internal states . By exploring the entire feasible set and projecting it onto the -space, we obtain the feasible boundary region , which is submitted to the upper-level dispatch center for centralized optimization. This process ensures that the internal device constraints are implicitly satisfied while preserving data privacy.
In contrast to traditional bi-level iterative frameworks, the equivalent projection approach enables each VPP to condense its complex internal constraints into a low-dimensional feasible region defined by boundary coordination variables (e.g., tie-line active power and cost). The projection process involves solving multiple instances of the internal VPP problem to determine the outer convex hull of feasible operating points in the coupling variable space. The resulting region acts as a constraint set for the upper-level market-clearing problem, thus transforming the original nested optimization into a decoupled and efficient structure.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}