1. Introduction
Heat exchangers and several heat transfer devices [
1,
2] are widely used in different industry processes. However, some problems such as fouling are presented in these systems, which causes the deterioration of the heat transfer. Therefore, the estimation of some parameters to monitor the heat transfer on heat exchangers is required. Different estimation methods have been used to estimate the unknown parameters of a process model. In [
3], decomposition-based recursive least squares (D-RLS) parameter estimation designed for systems of input nonlinear error equations was presented. The algorithm is a recursive form of the least-squares algorithm adapted for online parameter estimation. However, the convergence analysis of the proposed algorithm requires further study. In [
4], the estimation of the dynamic parameters of a mathematical model of a Li-ion battery was presented using the least-square method with the forgetting factor to track the state change in the Li-ion battery in real time. However, the accuracy of the proposed model is not high in the initial discharge phase. In [
5], a parameter identification of polynomial coefficients describing the structure of a Hammerstein MISO system was performed using the decomposition principle. To simplify the estimation process, the model was split into two parts, one with single parameters and the other with bilinear parameters. A technique called matrix conversion technology was used to reconstruct two estimation models, and an adaptive parameter estimation method was proposed that interacts to identify parameters interactively. The convergence of parameter estimation was demonstrated using stochastic theory and the martingale theorem. The presented results show that the idea of hierarchical estimation can realize suitable interactive estimation for complex and coupled systems. In [
6], a parameter estimation procedure was developed that evaluates the properties of U-shaped geothermal heat exchangers. This term refers to the design of the pipe buried in the ground, facilitating an efficient heat exchange between the circulating fluid in the system and the surrounding ground, using a step-by-step strategy. This strategy involves a systematic and sequential approach that, instead of addressing all parameters simultaneously, divides the process into distinct stages or steps, each focusing on a specific set of parameters. These steps are designed to improve the efficiency and accuracy of the estimation. In [
7], using parameter estimation, the evaluation of heat transfer correlations for the Nusselt number for improved heat exchangers was carried out; furthermore, a procedure to identify the presence of transition in the flow was presented. The results revealed that the relative errors increase monotonically with the noise level; therefore, the estimation algorithm used can be considered stable. The results show that step-by-step estimation method could generate accurate values and the fitting data match adequately the experimental data. In [
8], a multiparameter estimation using a model reference adaptive system (MRAS) was performed. The estimation was carried out to mitigate the adverse effect of parameter variation on the speed control without a position sensor of a permanent magnet synchronous motor (PMSM), based on the stator forward voltage estimation (FFVE). A rotor position and speed estimation scheme employing a FFVE and a MRAS multiparameter estimation was used, which includes stator resistance, rotor flux connection, and rotor speed. The results showed that the proposed method exhibits good performance under variable load and low speed conditions. Additionally, the proposed method showed robustness against parameter errors and load disturbances. In [
9], the adaptive kernel density estimation theory was used to estimate the total heat exchange factor. The weighted least squares (WLS) model was iteratively solved by combining the conjugate gradient method (CGM) and the gradient projection method (GPM). The results showed that the effects of residual pollution and residual flooding were effectively avoided based on the adaptive kernel density estimation theory. The results also showed that the adaptive weighted least squares model can effectively reduce the influence of outliers on the identification model.
Other methods that have been studied are methods based on the Kalman filter (KF), which is an effective online estimation method. The KF has been used in different research, i.e., the estimation of the charge state of lithium-ion batteries [
10], in wind turbines for fault diagnosis [
11], and for heat exchangers [
12]. In [
13], a dual-extended Kalman filter (DEKF) was implemented to estimate the state and the parameter of the system. The observer was a model-based vehicle estimator. In [
14], the fault detection and isolation (FDI) in sensors for a heat exchanger using an unscented Kalman filter (UKF) was developed. The state estimation and decision function are built to detect the presence of a fault in the sensor by the use of the UKF. The proposed algorithm presents certain advantages, such as a lower computational load, ease of programming, simple applicability, generalization capacity, among other positive aspects. In [
15], a parameter estimation and state prediction technique using the constrained DEKF was presented. In this study, a simplified thermal model was evaluated, using both simulation and measured data. Overall, the DEKF-based algorithm demonstrated a high update rate, implying that parameters could be updated frequently, approximately half to two-thirds of the time. This resulted in a reduction in the computational load required compared to conventional nonlinear filtering techniques. In [
16], the states of a canonical observable dual-rate system were estimated using the Kalman filter. Two algorithms were used in this research: the first algorithm was used to calculate the output at instants that are not accessible, while the second used an auxiliary model to obtain the output. Both methods were highly efficient, with an acceptable error level. Although the first algorithm had a lower error compared to the second, the second algorithm managed to converge faster. However, when the input update rate was increased relative to the output sampling rate, the first algorithm could no longer converge, so the second was used. In [
17], a solution method based on state-augmented higher-order quadrature Kalman filter (SA-CKF) with the augmented noise state vector was carried out for state of charge (SOC) estimation in Li-ion batteries. The results demonstrate that the proposed 5th order SA-CKF superiorly solves the SOC estimation problem compared to the 4th order and unaugmented CKF.
For heat exchangers, the estimation of the heat transfer coefficient is important because it can provide information for detecting fouling in the system. In [
18], an approach to detect fouling in heat exchangers was proposed using the extended Kalman filter (EKF). The approach consists of estimating the overall heat transfer coefficient by the EKF using a cell-based model of the heat exchanger. The simulation results demonstrate that the coefficient can be accurately estimated. In [
19], the parameters of a heat exchanger model were estimated by using statistical methods, Kalman filtering, and least squares. Empirical relations for convection heat transfer were included in the parameter to estimate. However, convection heat transfer is considered to depend on mass flow rate rather than temperature to avoid nonlinearities. In [
20], an extended Kalman filter (EKF) was applied to estimate parameters in heat exchanger models. The EKF was used because of the nonlinearity of the model since the convection heat transfer parameter depends on the mass flow and temperature. The model parameterization is tuned using statistical methods, and the findings show that the flow and temperature dependence for heat transfer improves performance. Furthermore, a model with more sections better reflects the physical considerations of the system, although good performance can be obtained with fewer sections. In [
21], an extended Kalman filter (EKF) was used to detect fouling in a heat exchanger by the estimation of the heat transfer coefficient parameter of the model. The method can detect fouling in transient states and it is well suitable for the online detection of the fouling. The comparison of the parameter estimation between a clean and fouling heat exchanger was presented. A statistical test called Cusum test was used to detect the fouling considering the reduction of the estimated parameter. In [
22], a DEKF was applied to estimate the Reynolds number in a falling film heat exchanger, aiming to calculate the complete wetting efficiency. Therefore, the estimated value provides a reference number at which the heat exchanger reached the maximum heat transfer rate. The DEKF was applied to a large system of 13 evaporator tubes, and the Jacobian matrices were evaluated numerically due to the system complexity. For large systems, this can be a disadvantage and can be computationally expensive, especially in real-time applications. In [
23], a modification DEKF to estimate the states of heat exchanger and fouling resistance (FR) using a linear parametric varying (LPV) model was proposed. They included a machine-learning (ML) model to provide guiding input in the FR prediction model of DEKF, which provides a preliminary estimate of FR to reduce the overhead on DEKF and enables faster convergence.
In general terms, the dual-extended Kalman filter has some advantages compared to EKF methods, such as estimating both the state and the parameters simultaneously, demonstrating less computational cost [
24] and a high update rate [
15], the parameter estimator can be turned off when optimal parameter values have been found, and it performs correctly in the presence of the abrupt changes in parameters [
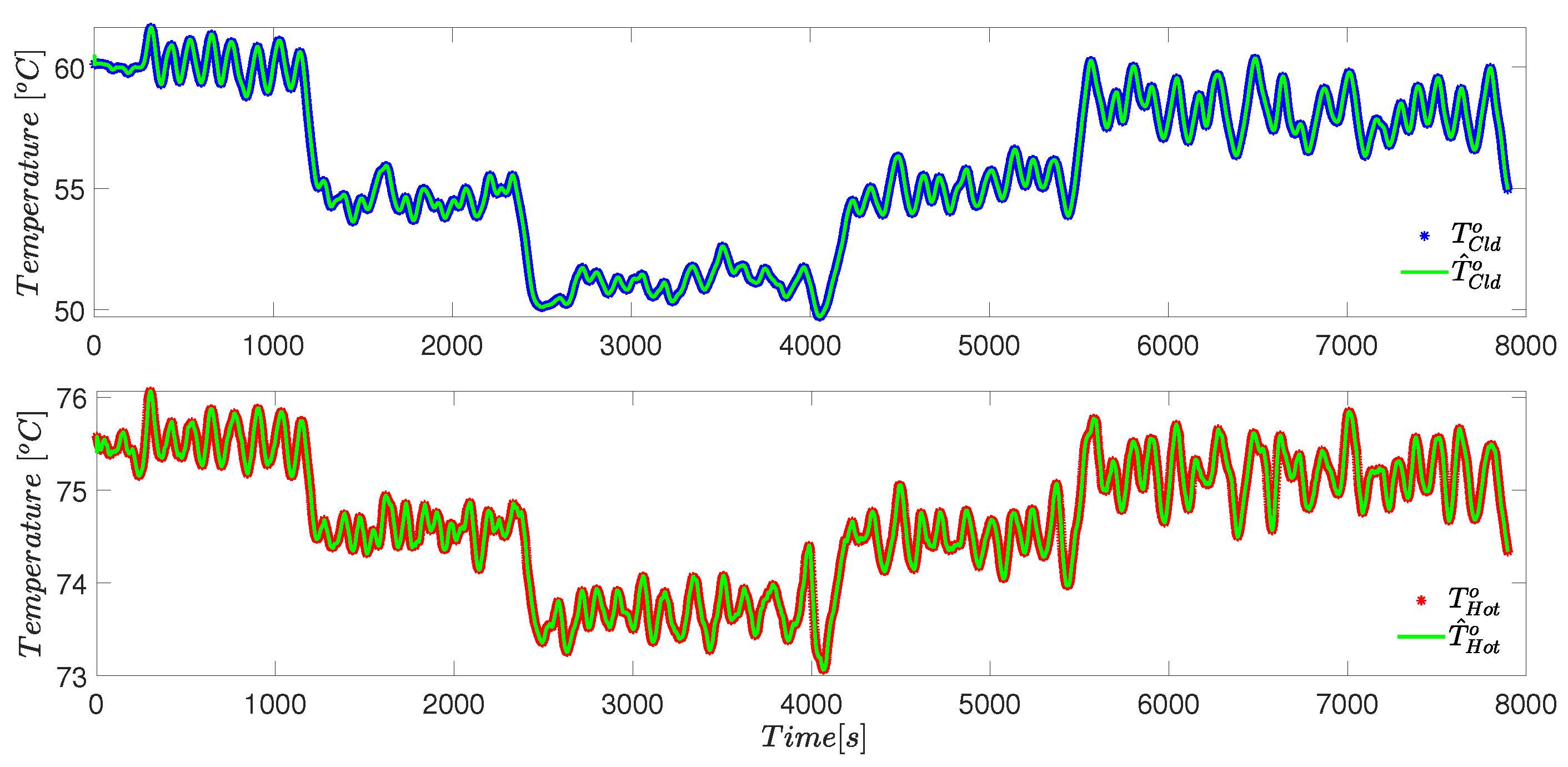
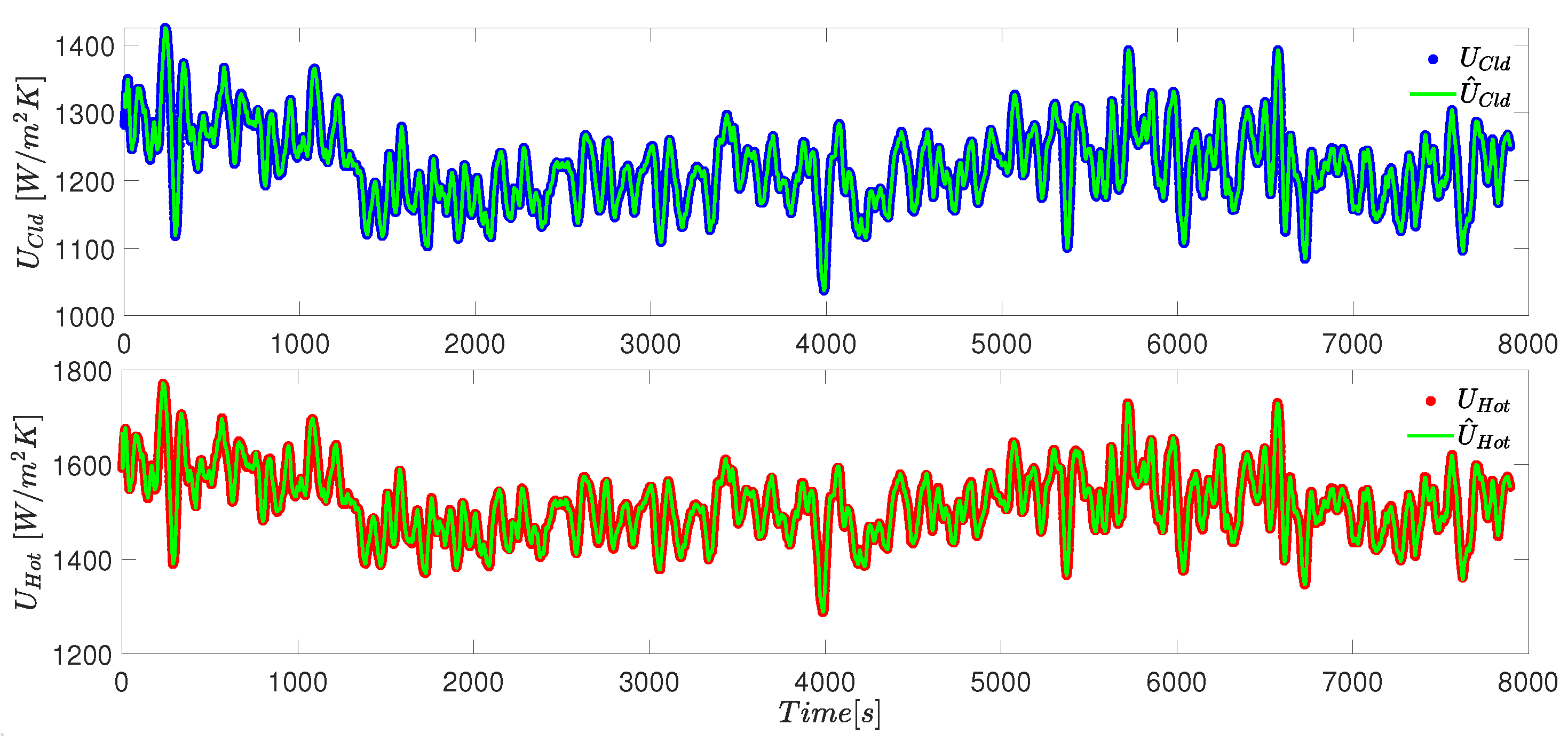
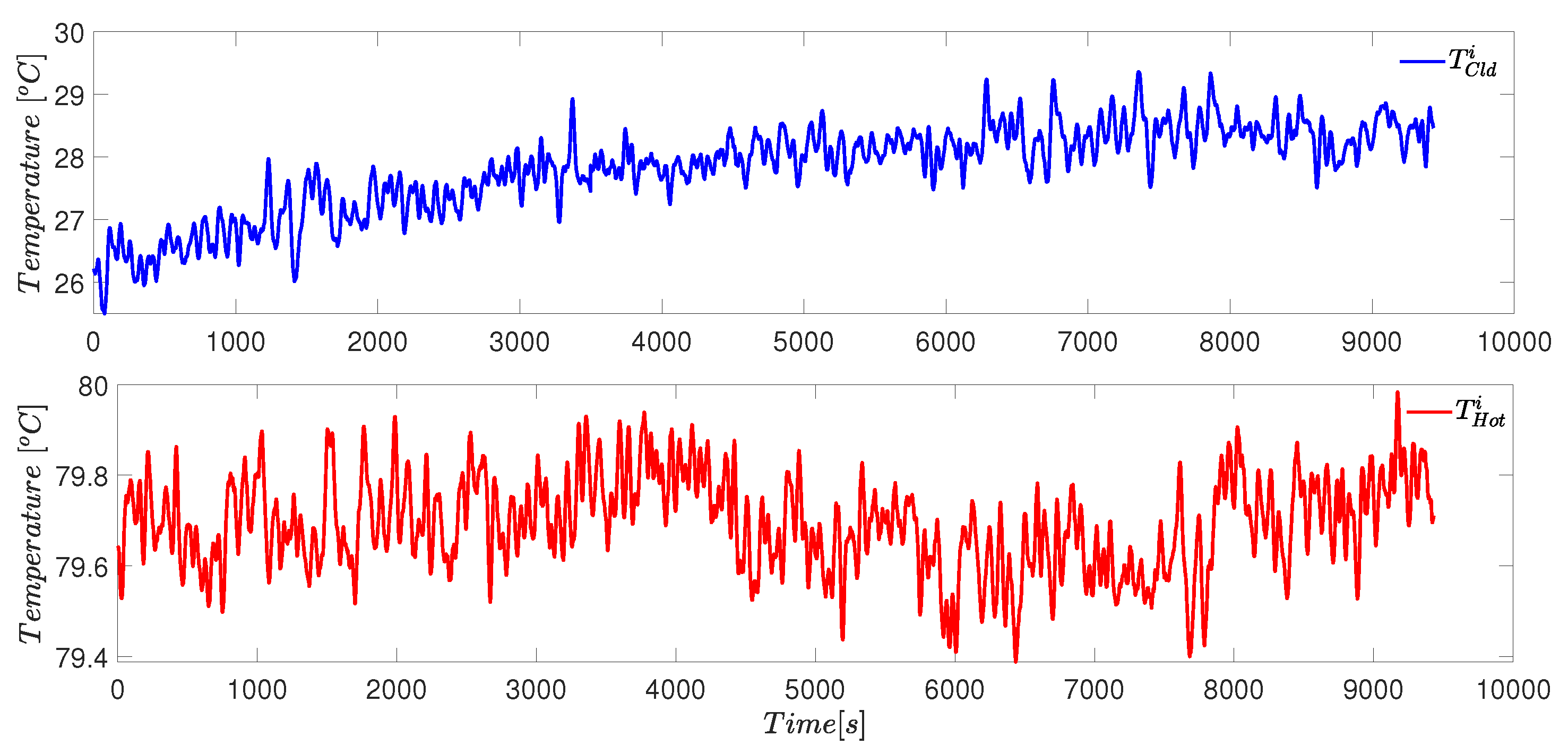
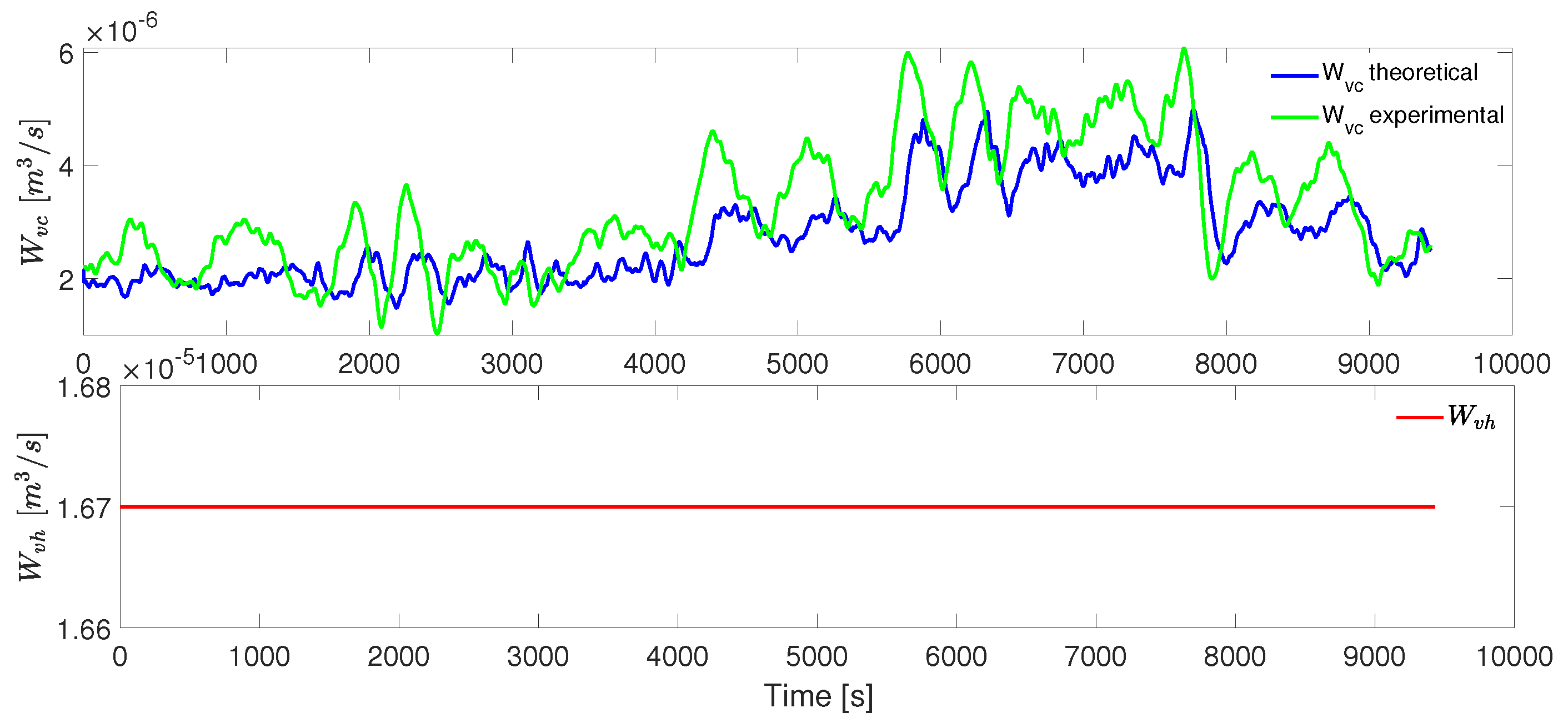
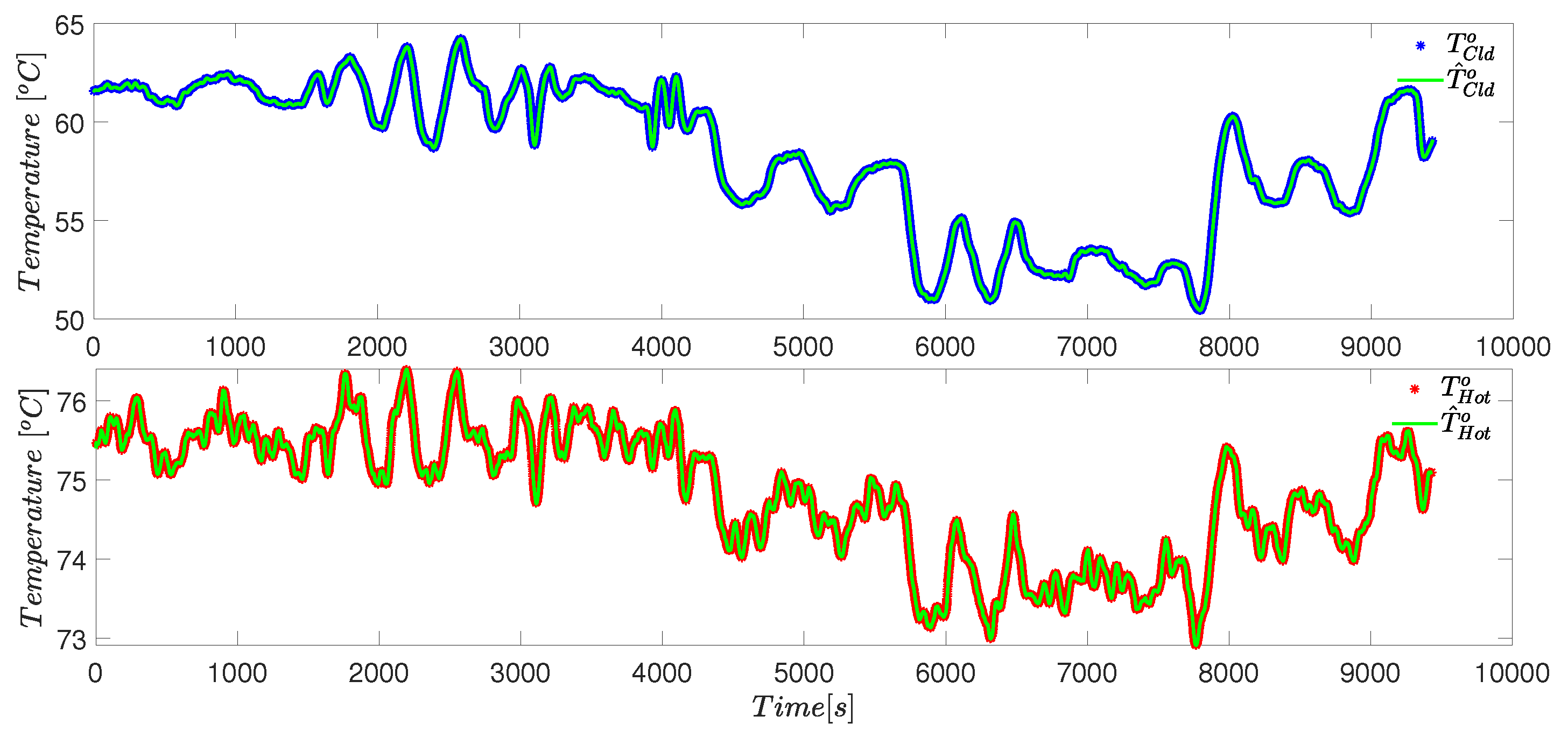
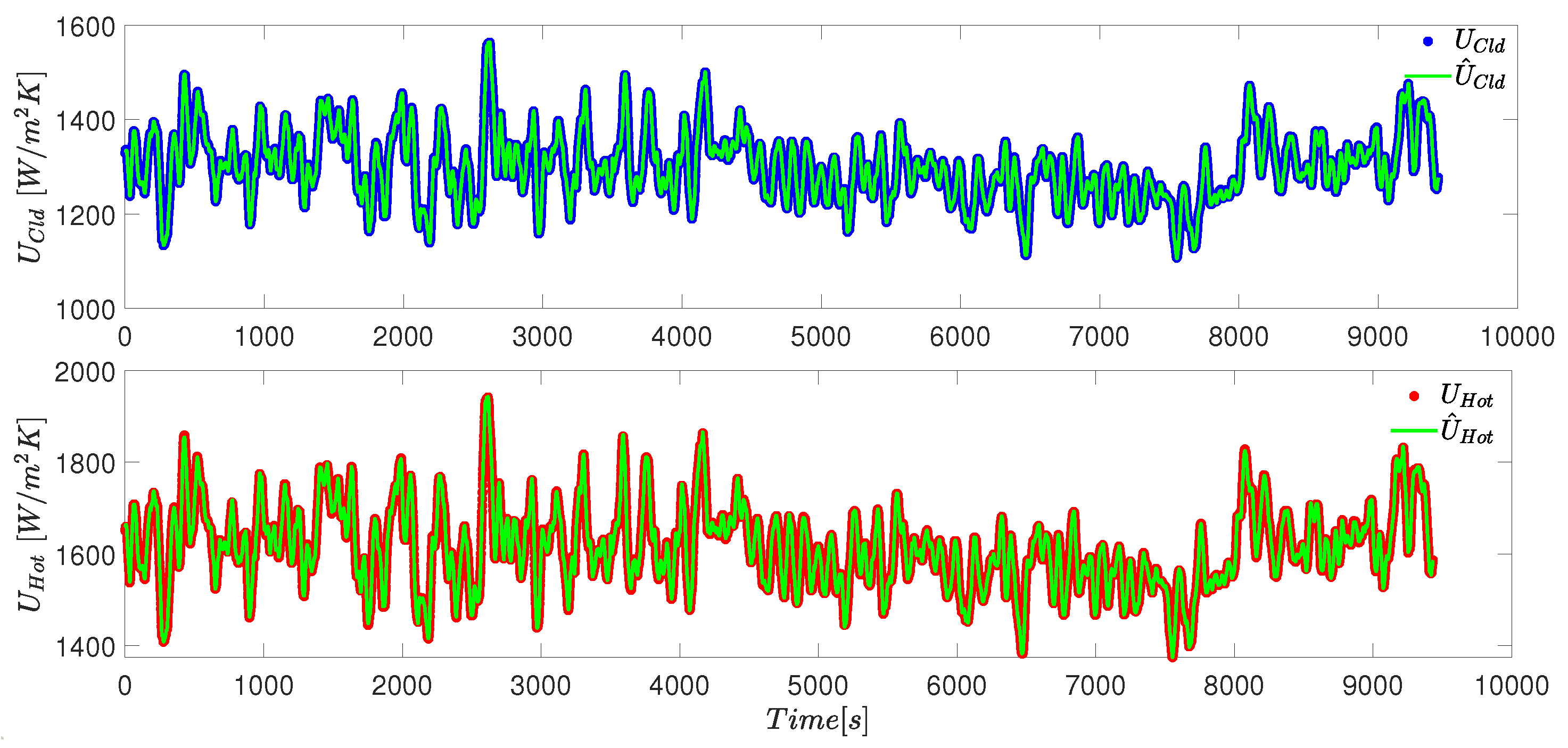
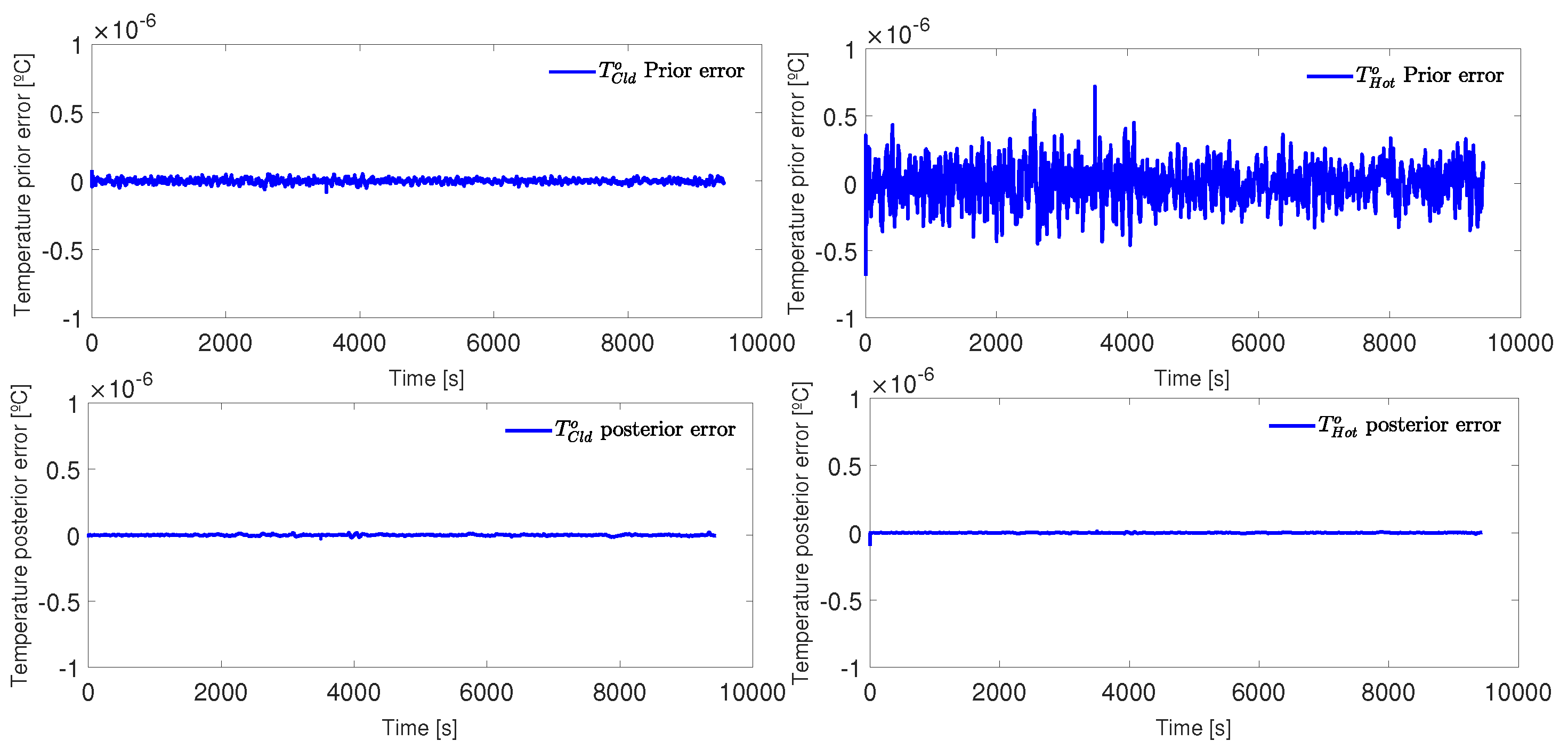
25]. Therefore, DEKF appears suitable for implementation in heat exchangers. Hence, in this work, the online estimation of the temperatures and heat transfer coefficients of a heat exchanger using the DEKF was carried out. The estimations were carried out at two experimental tests, where the cold mass flow rates were varied along the tests. The estimated values of the heat transfer coefficients were compared with values calculated by algebraic equations. For concluding the results section, an error analysis of the estimated temperatures and heat transfer coefficients was presented.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}