
Multi-Timescale Dispatching Method for Industrial Microgrid Considering Electrolytic Aluminum Load Characteristics


Abstract
1. Introduction
- Based on the principle of heat balance, an electrothermal coupling model of an aluminum electrolytic cell was constructed. The aluminum electrolytic cell was divided into two systems: liquid and solid, and based on the formula of energy conversion and heat conduction, the dynamic temperature expression of an electrolyte in an aluminum electrolytic cell was derived.
- Based on the carbon emission models of EA loads and CHP units, and with the optimization objective of maximizing the operating benefit of isolated microgrids, a low-carbon and economic dispatching method for aluminum isolated microgrids considering the temperature constraints of the electrolytic cell was proposed. The potential of EA loads to participate in the DR was fully exploited to improve the PV consumption rate of the isolated microgrids based on avoiding overstepping of the temperature limits of an aluminum electrolytic cell.
- To tackle the renewable energy output uncertainty problem, a day-ahead-intraday multi-timescale optimal dispatching model for industrial islanded microgrids considering the participation of EA loads in DR was established. The EA load has the advantages of high flexibility and fast power regulation, and can respond to the system power balance demand in real time on a daily time scale to smooth the volatility of photovoltaic output.
2. Electrothermal Coupling Model of Aluminum Electrolytic Cell
2.1. EA Load Regulation Characteristics
2.2. Liquid System
2.3. Solid System
3. CHP Units and EA Load Dispatch Model
3.1. Industrial Microgrid System Structure
3.2. CHP Units Model
3.3. EA Load Model
4. Multi-Timescale Optimal Dispatch Model for Industrial Islanded Microgrids
4.1. Multi-Timescale Rolling Dispatch Strategy
4.2. Day-Ahead Dispatch Model
- (1)
- Objective function
- (2)
- Constraints
- (3)
- Model solution
4.3. Intraday Dispatching Model
- (1)
- Objective function
- (2)
- Constraints
- (3)
- Model solution
5. Case Study
5.1. System Parameters
5.2. Aluminum Electrolytic Cell Temperature Model Validation
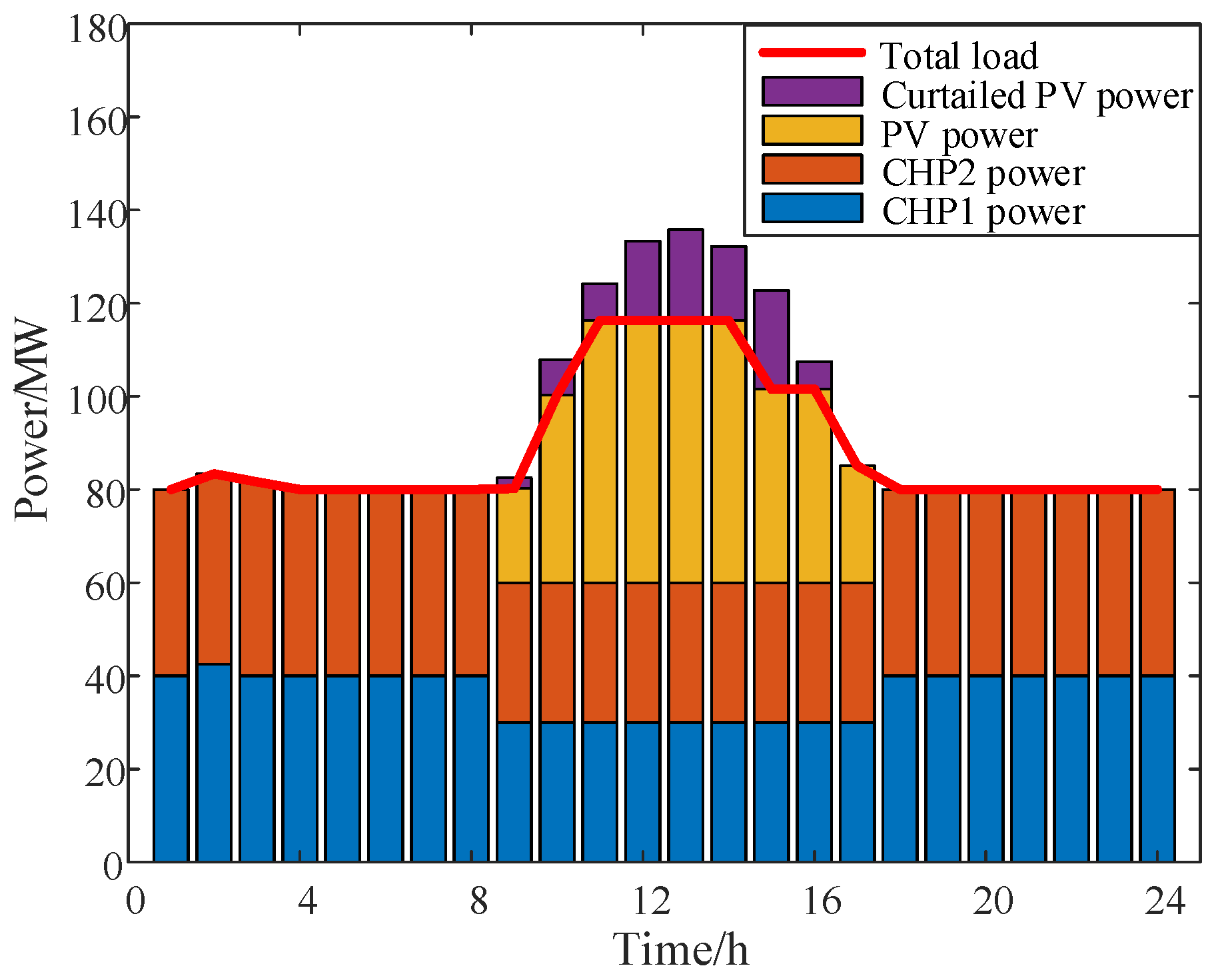
5.3. Day-Ahead Dispatch Results
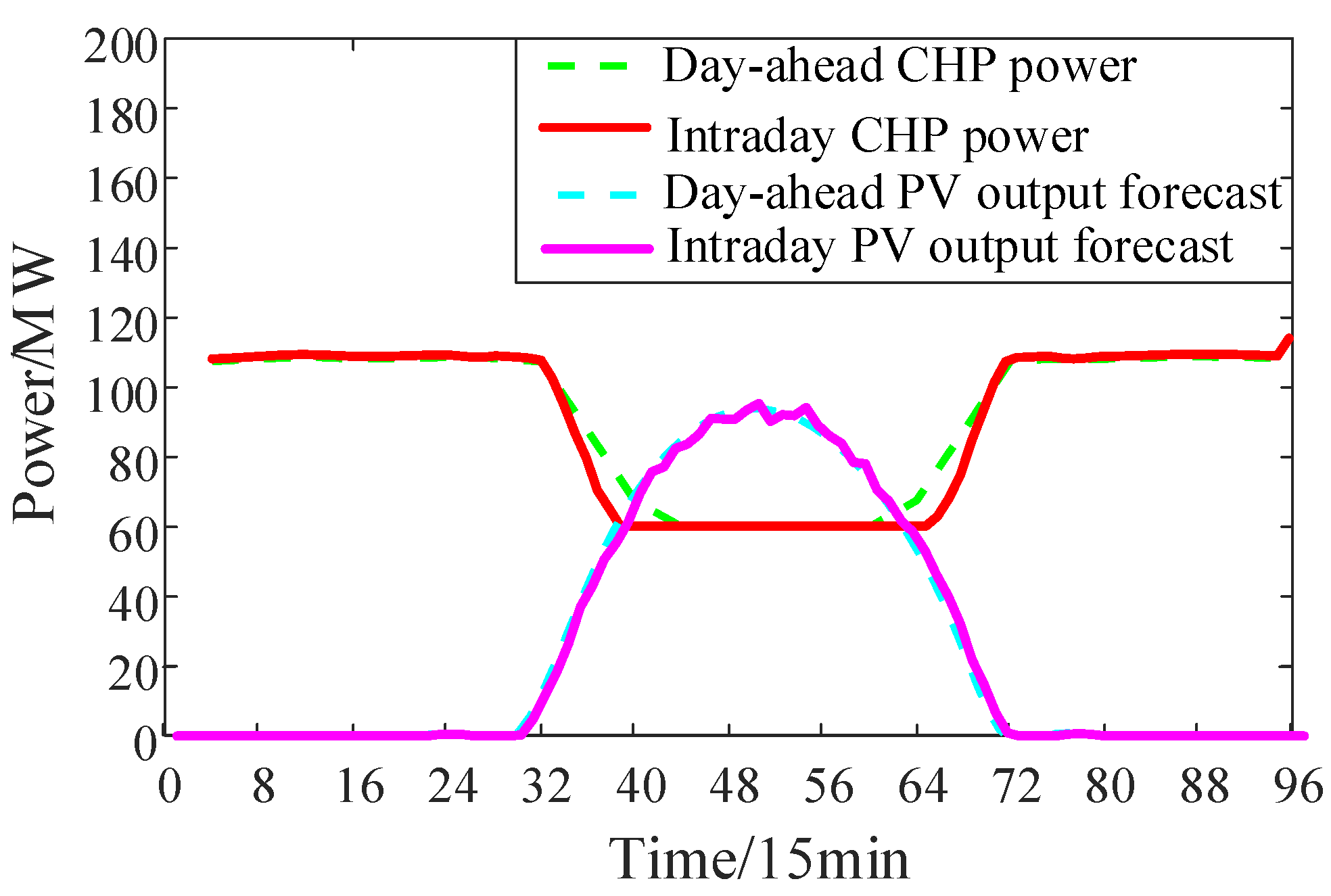
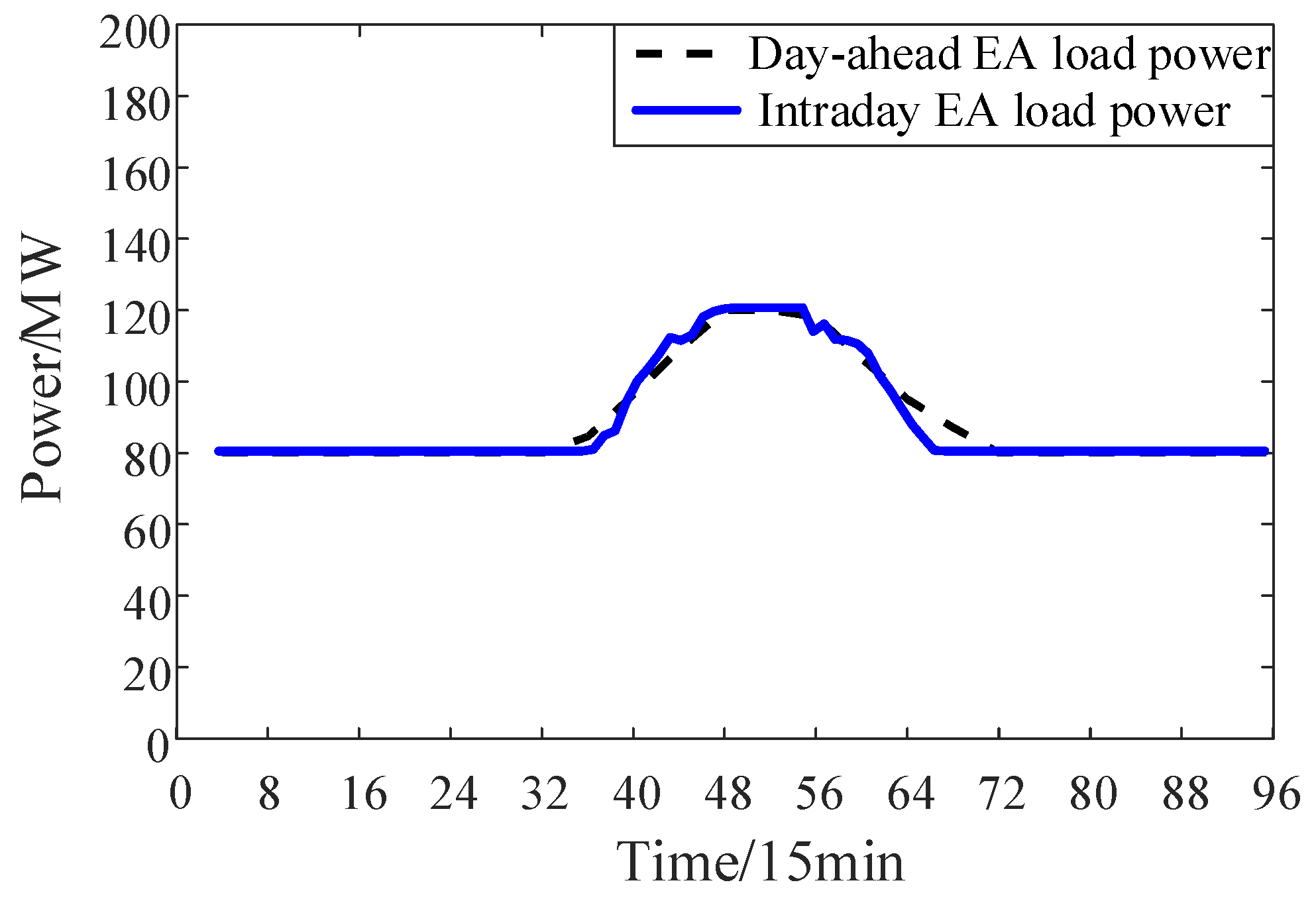
5.4. Intraday Dispatch Results
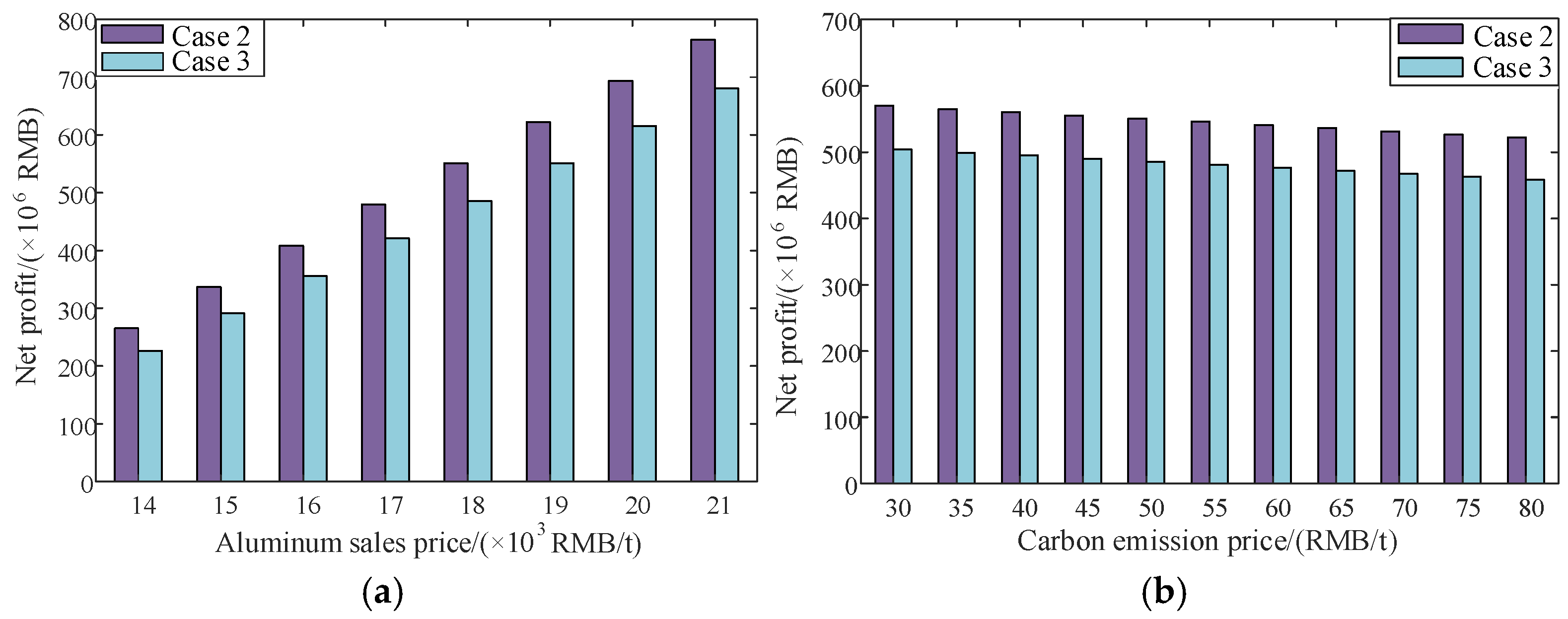
5.5. Sensitivity Analysis
6. Conclusions
- Incorporating the dynamic temperature constraints of aluminum electrolytic cells in the optimization of EA load dispatch can effectively mitigate the risk of electrolyzer temperature overruns, ensuring the safe and stable operation of the EA process.
- The participation of EA loads in system DR improves the PV consumption rate, contributing to the low-carbon and economically efficient operation of industrial islanded microgrids.
- Leveraging the high flexibility and rapid regulation capabilities of EA loads, real-time adjustments to the system’s power balance on an intraday timescale can effectively smooth out the fluctuations in PV output.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Han, J.; Yan, L.; Li, Z.; Zhang, L.; Paaso, A.; Bahramirad, S. A Multi-Timescale Two-Stage Robust Grid-Friendly Dispatch Model for Microgrid Operation. IEEE Access 2020, 8, 74267–74279. [Google Scholar] [CrossRef]
- Zhang, J.; Tan, J.; Liu, Z.; Li, M.; Tao, Y.; Luo, T. Active Distribution Network Flexibility Evaluation Method Considering Flexibility Resource. In Proceedings of the 2022 12th International Conference on Power and Energy Systems (ICPES), Guangzhou, China, 23–25 December 2022; pp. 62–66. [Google Scholar]
- Chen, S.; Gong, F.; Sun, T.; Yuan, J.; Yang, S.; Liu, Z. Research on the Method of Electrolytic Aluminum Load Participating in the Frequency Control of Power Grid. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; pp. 798–801. [Google Scholar]
- Xu, J.; Liao, S.; Sun, Y.; Ma, X.; Gao, W.; Li, X.; Gu, J.; Dong, J.; Zhou, M. An isolated industrial power system driven by wind-coal power for aluminum productions: A case study of frequency control. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 471–483. [Google Scholar]
- Ding, X.; Xu, J.; Sun, Y.; Liao, S.; Xia, T.; Chen, W. A Demand Side Industrial Aluminum Load Control Scheme based on Output Regulator Theory for Wind Power Smoothing. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; pp. 286–291. [Google Scholar]
- Gong, F.; Ren, K.; Zhang, A.; Chen, S.; Feng, J.; Zhang, K.; Li, D. Review of electrolytic aluminum load participating in demand response to absorb new energy potential and methods. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; pp. 1015–1019. [Google Scholar]
- Zhang, X.; Hug, G. Bidding strategy in energy and spinning reserve markets for aluminum smelters’ demand response. In Proceedings of the 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2015; pp. 1–5. [Google Scholar]
- Shen, X.; Shu, H.; Fan, Z.; Mo, X. Integrated Control Strategy for Electrolytic Aluminum Load Participation in Frequency Modulation. IEEE Access 2021, 9, 56955–56964. [Google Scholar] [CrossRef]
- Yin, Y.; Sun, X.; Li, T.; Mi, N.; Zhong, H.; Yu, J. Research on Power Grid Auxiliary Frequency Regulation Technology Based on Electrolytic Aluminum High-Energy Load Regulation. In Proceedings of the 2022 4th International Conference on Smart Power & Internet Energy Systems (SPIES), Beijing, China, 27–30 October 2022; pp. 1701–1707. [Google Scholar]
- Liu, J.; Wang, K.; Su, Z.; Feng, Y.; Wang, C.; Ai, X. Source-load Coordinated Optimal Scheduling in Stochastic Unit Commitment Considered Electrolytic Aluminum Load and Wind Power Uncertainty. In Proceedings of the 2022 IEEE 5th International Electrical and Energy Conference (CIEEC), Nangjing, China, 27–29 May 2022; pp. 2175–2179. [Google Scholar]
- Liu, J.; Zeng, K.; Wang, C.; Le, L.; Zhang, M.; Ai, X. Unit commitment considering electrolytic aluminum load for ancillary service. In Proceedings of the 2019 4th International Conference on Intelligent Green Building and Smart Grid (IGBSG), Yichang, China, 6–9 September 2019; pp. 608–611. [Google Scholar]
- Zeng, K.; Wang, H.; Liu, J.; Dong, C.; Lan, X.; Wang, C.; Le, L.; Ai, X. A Bi-level Programming Guiding Electrolytic Aluminum Load for Demand Response. In Proceedings of the 2020 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Weihai, China, 13–16 July 2020; pp. 426–430. [Google Scholar]
- Chai, M.; Tu, C.; Xiao, B.; Long, L.; Xu, H. Study on Modeling and Thermal Behavior of Spiral Wound Aluminum Electrolytic Capacitor. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; pp. 1337–1342. [Google Scholar]
- Deng, J. Research on Multi-Timescale Rolling Scheduling Strategy for Combined Electric and Thermal Systems. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2016. [Google Scholar]
- Zhao, C.; Wang, J.; Watson, J.-P.; Guan, Y. Multistage robust unit commitment considering wind and demand response uncertainties. IEEE Trans. Power Syst. 2013, 28, 2708–2717. [Google Scholar] [CrossRef]
- Duan, M.; Shao, X.; Cui, G.; Zheng, A.; Tong, G.; Wu, G.; Gao, C. Rolling dispatch of demand response resources considering renewable energy accommodation. In Proceedings of the 2017 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 358–362. [Google Scholar]
- Yang, H.; Li, M.; Jiang, Z.; Zhang, P. Multi-Time Scale Optimal Scheduling of Regional Integrated Energy Systems Considering Integrated Demand Response. IEEE Access 2020, 8, 5080–5090. [Google Scholar] [CrossRef]
- Fan, C.; Zhao, W.; Xu, J.; Wang, Z.; Zhou, J.; Shi, S. Multi-Time Scale Low-Carbon Optimization of IES Considering Demand Response of Multi-Energy. In Proceedings of the 2022 IEEE Conference on Telecommunications, Optics and Computer Science (TOCS), Dalian, China, 11–12 December 2022; pp. 793–799. [Google Scholar]
- Zhang, S.; Pan, G.; Li, B.; Gu, W.; Fu, J.; Sun, Y. Multi-Timescale Security Evaluation and Regulation of Integrated Electricity and Heating System. IEEE Trans. Smart Grid 2025, 16, 1088–1099. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, S.; Gu, W.; Lu, S.; Chung, C.Y. Dynamic optimal energy flow of integrated electricity and gas systems in continuous space. Appl. Energy 2024, 375, 14. [Google Scholar] [CrossRef]
- Allard, F.; Désilets, M.; LeBreux, M.; Blais, A. Improved heat transfer modeling of the top of aluminum electrolysis cells. Int. J. Heat Mass Transf. 2019, 132, 1262–1276. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, X.; Zhao, J.; Chen, C.; He, G.; Zhang, L. The study of thermal-electrical coupling numerical simulation of aluminum electrolytic cell anode assembly and parameter optimization of steel claws. Results Eng. 2025, 26, 104738. [Google Scholar] [CrossRef]
- Wang, C. Low-Carbon Economic Dispatch of Power System Considering Electrolytic Aluminum Load for Demand Response. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| Number of electrolyzer series | 1 | Voltage of a single electrolyzer/V | 4.03 |
| Rated capacity/MW | 100 | Power adjustment range/% | ±20 |
| Rated current/kA | 400 | Climbing rate/MW/h | ±20 |
| Average voltage of a single electrolyzer/V | 62 | Maximum number of adjustments | 12 |
| Unit | Maximum Electrical Power | Minimum Electrical Power | Maximum Thermal Power | Minimum Thermal Power | Climbing Rate |
|---|---|---|---|---|---|
| 1 | 100 MW | 30 MW | 120 MW | 40 MW | ±30 MW/h |
| 2 | 100 MW | 30 MW | 120 MW | 40 MW | ±30 MW/h |
| Numeric Name | Case 2 | Case 3 | |
|---|---|---|---|
| Investment costs/(in million RMB) | Electrolytic aluminum plant | 620 | 620 |
| Thermal power plant | 477 | 477 | |
| Photovoltaic power station | 330 | 330 | |
| Total investment cost | 1427 | 1427 | |
| Production and operation cost/(in million RMB) | Coal consumption | 305.37 | 283.85 |
| Raw materials | 356.76 | 324.44 | |
| Curtail PV | 2.04 | 8.09 | |
| Carbon emissions | 47.91 | 45.47 | |
| Operation and maintenance | 21.50 | 20.34 | |
| Other | 183.40 | 170.55 | |
| Total cost | 916.98 | 852.74 | |
| Revenue/(in hundred million RMB) | Total revenue | 1284.33 | 1168.0 |
| Economic index | Net profit/(in million RMB) | 367.35 | 315.26 |
| Net profit per ton of aluminum/(in RMB) | 5148.42 | 4858.45 | |
| ROI/% | 25.74% | 22.09% | |
| IPP/year | <4 | >4 | |
| BEP/t(Al) | 277,172.41 | 293,715.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Liu, X.; Tang, J.; Han, H.; Su, M.; Huang, Y. Multi-Timescale Dispatching Method for Industrial Microgrid Considering Electrolytic Aluminum Load Characteristics. Processes 2025, 13, 1411. https://doi.org/10.3390/pr13051411
Liu R, Liu X, Tang J, Han H, Su M, Huang Y. Multi-Timescale Dispatching Method for Industrial Microgrid Considering Electrolytic Aluminum Load Characteristics. Processes. 2025; 13(5):1411. https://doi.org/10.3390/pr13051411
Chicago/Turabian StyleLiu, Ruiping, Xubin Liu, Jianling Tang, Hua Han, Mei Su, and Yongbo Huang. 2025. "Multi-Timescale Dispatching Method for Industrial Microgrid Considering Electrolytic Aluminum Load Characteristics" Processes 13, no. 5: 1411. https://doi.org/10.3390/pr13051411
APA StyleLiu, R., Liu, X., Tang, J., Han, H., Su, M., & Huang, Y. (2025). Multi-Timescale Dispatching Method for Industrial Microgrid Considering Electrolytic Aluminum Load Characteristics. Processes, 13(5), 1411. https://doi.org/10.3390/pr13051411