
A Novel Lyrebird Optimization Algorithm for Enhanced Generation Rate-Constrained Load Frequency Control in Multi-Area Power Systems with Proportional Integral Derivative Controllers


Abstract
1. Introduction
- This study proposes the development of the LOA, inspired by the behavior of lyrebirds, for parameter optimization of nonlinear load frequency controllers.
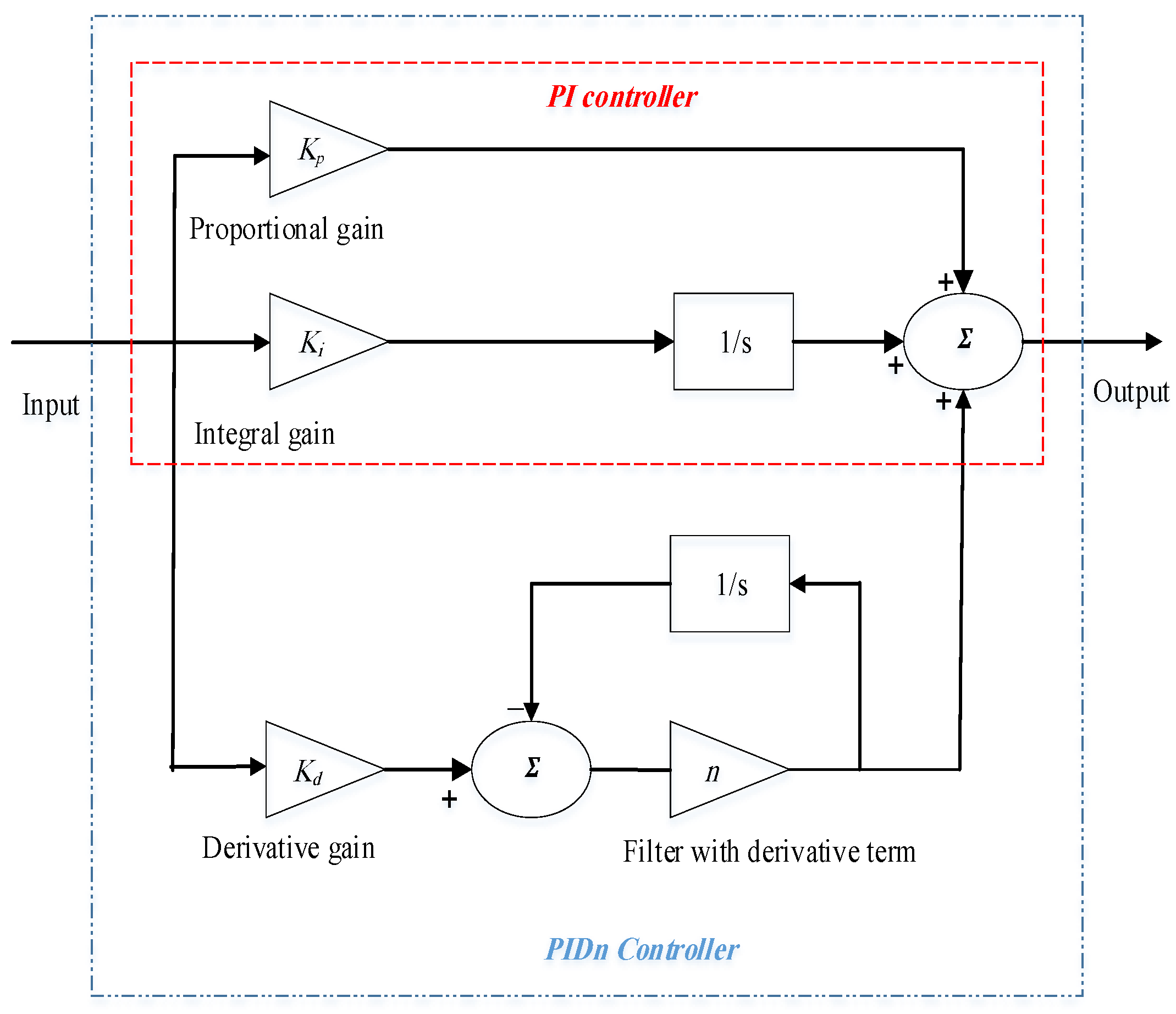
- This research demonstrates the effectiveness of the LOA in designing a PID controller with a filter (PIDn) to address power system oscillations.
- This study compares the performance of LOA-tuned PIDn controllers against several advanced algorithms, including the ZN, GA, BFOA, FA, and hybrid approaches.
- Simulation results reveal that the LOA-tuned PIDn controller outperforms existing methods in terms of settling times and the ITAE, providing better dynamic and damping performance.
- This study incorporates real-world constraints like GRCs to make the results practical and applicable to real systems.
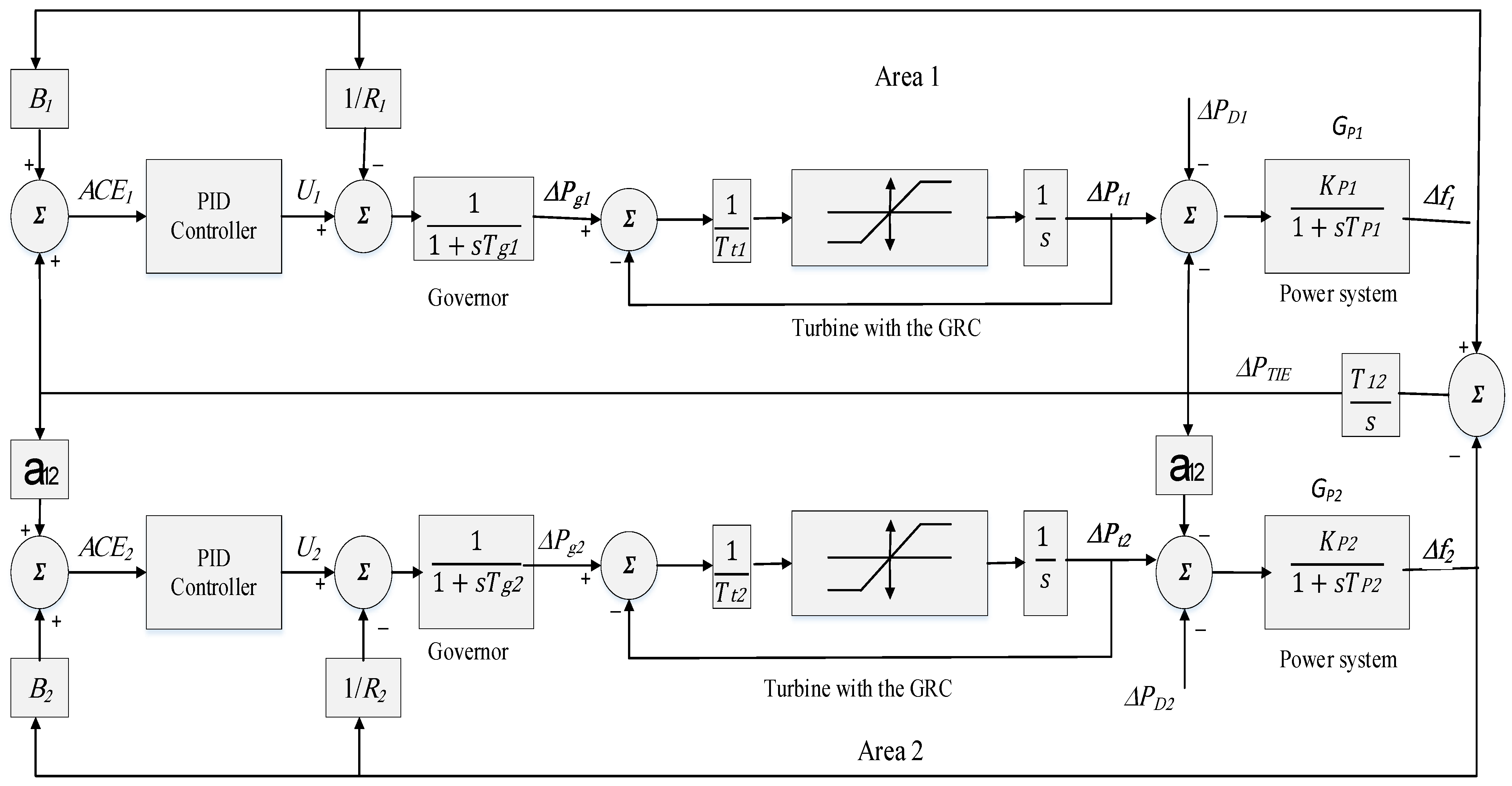
2. System Model: Generation-Rate-Constrained LFC in Multi-Area Systems
2.1. Framework for the System Model: A Comprehensive Overview of the Design Approach
2.2. Power System Model Under Investigation
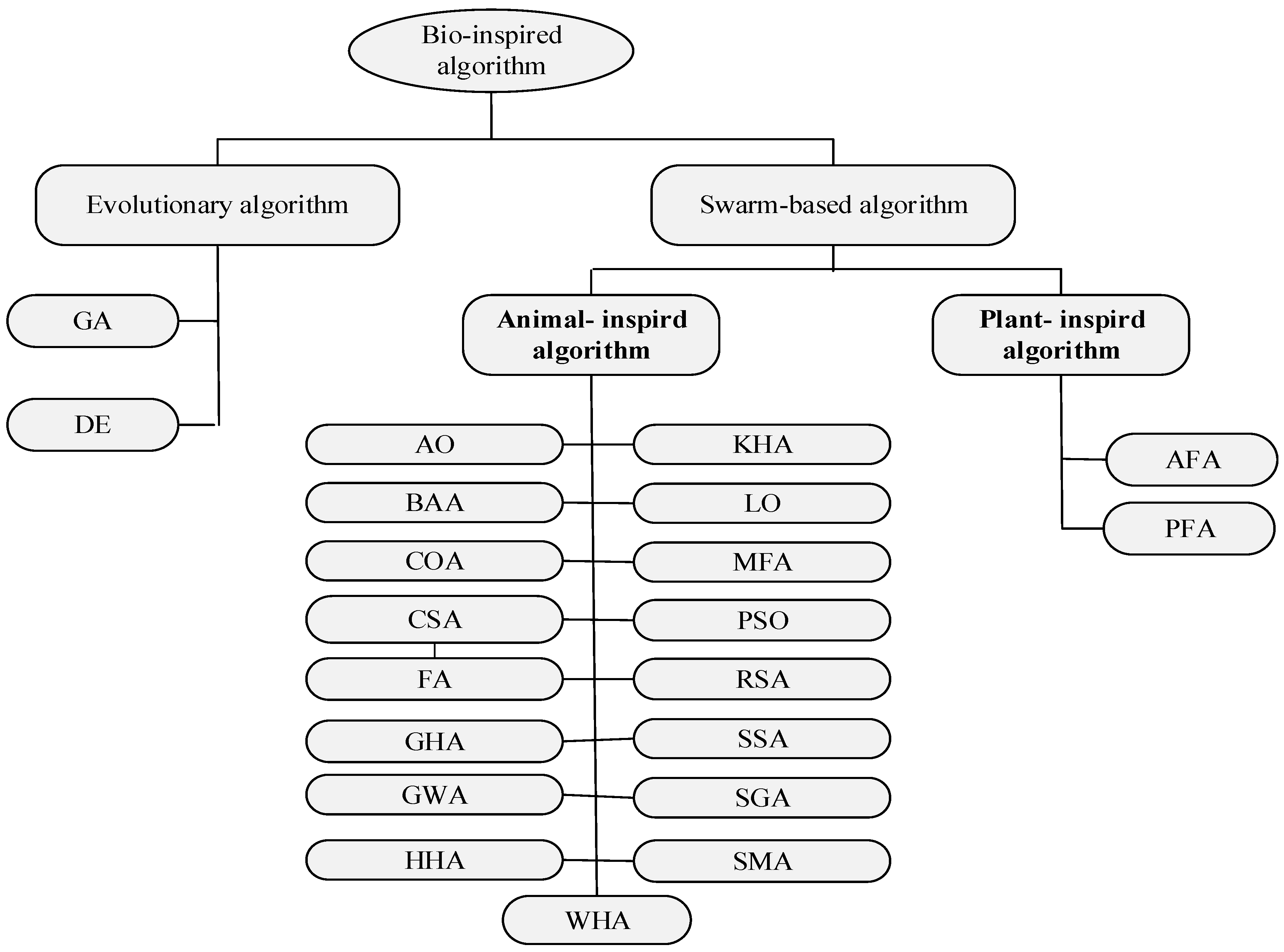
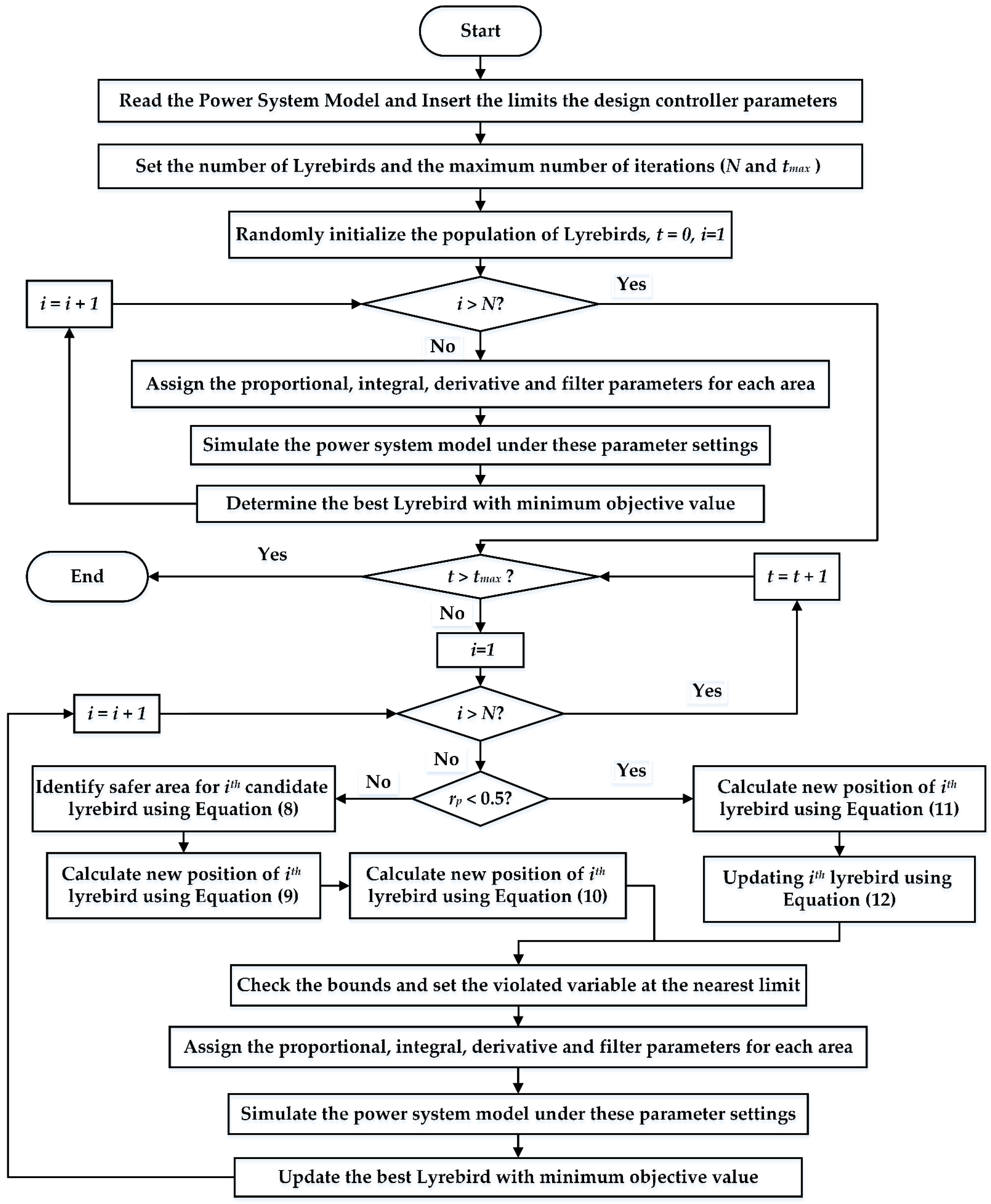
3. LOA
3.1. Population Initialization
3.2. Updating of Position
- Initialization: a population of candidate solutions (i.e., different sets of PIDn gains) is randomly initialized.
- Evaluation: each candidate solution is simulated in the LFC model, and the ITAE value is computed.
- Exploration and exploitation: The LOA search mechanism guides the solutions toward better PIDn gain settings. Safe zones are identified and candidate solutions are adjusted iteratively.
- Convergence check: The algorithm stops when the maximum iterations are maintained. For every subsequent iteration, the best solution (i.e., the set of PIDn gains yielding the lowest ITAE) is selected.
4. Simulation Results and Discussion
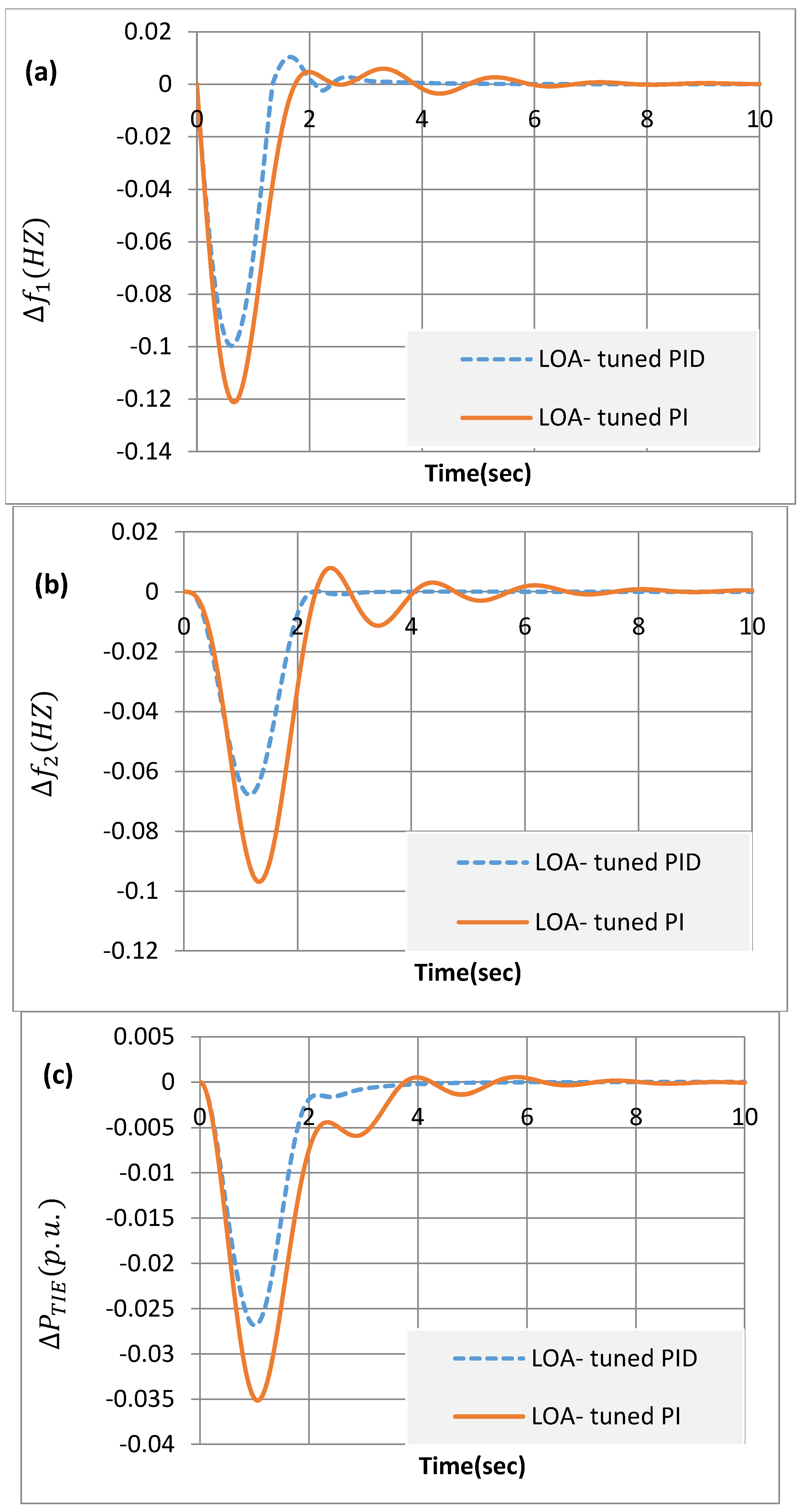
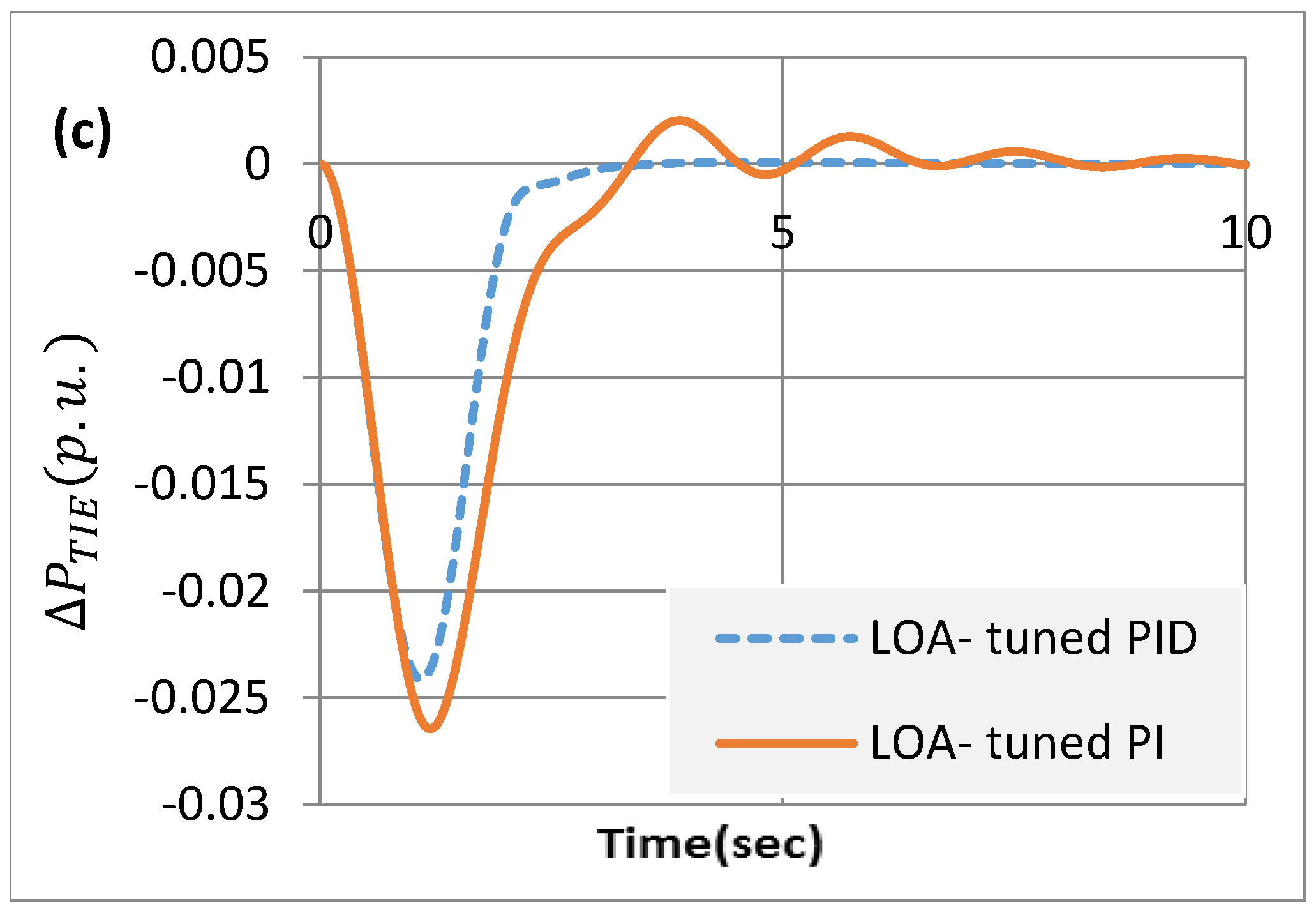
4.1. Case 1: SLI in Area 1
4.2. Case 2: SLI in Areas 1 and 2
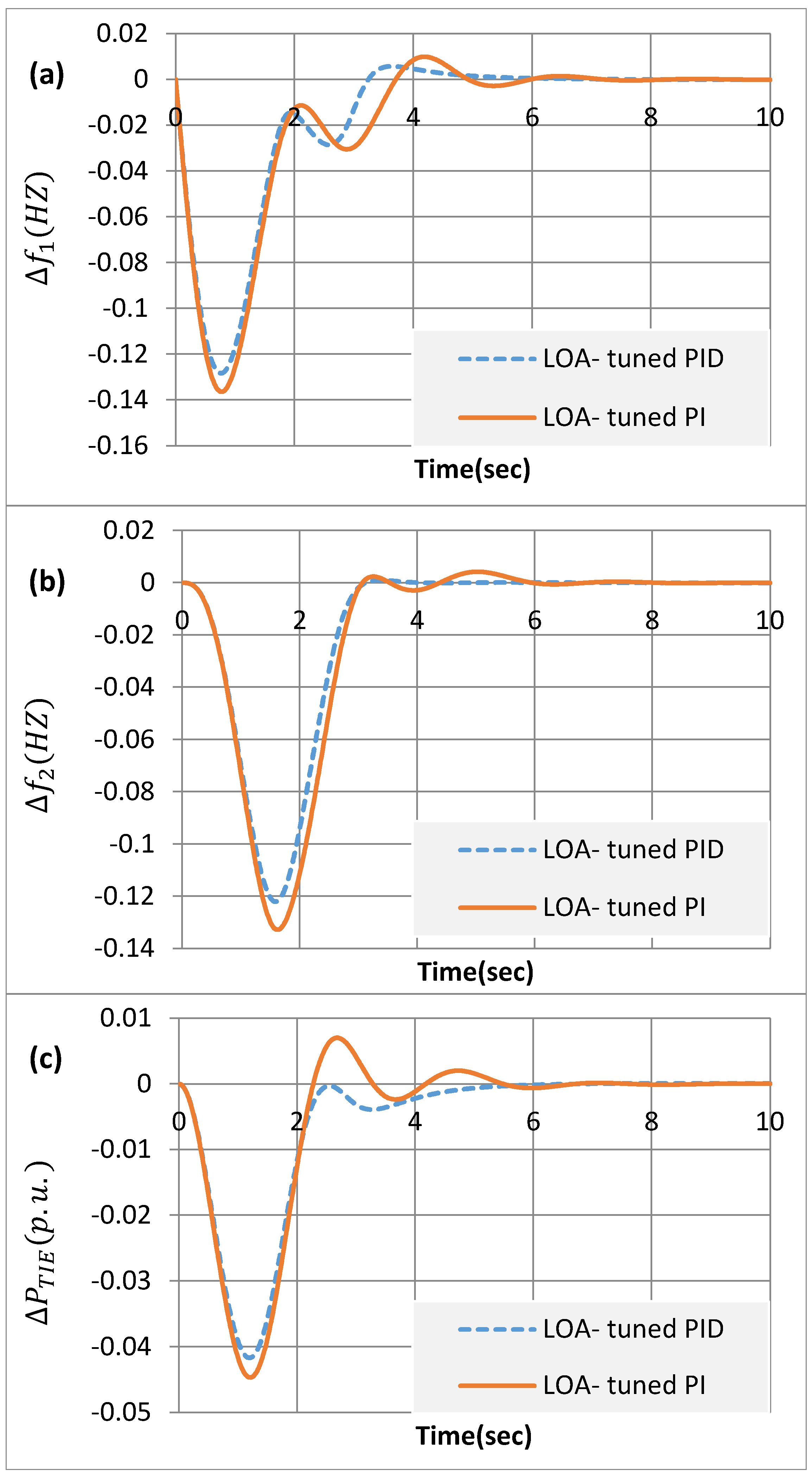
4.3. Case 3: Impact of Saturation Limit on System Response (GRC = ±0.025)
4.4. Discussion of Generalization of LOA to Different Power System Configurations
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| List of Abbreviations | |
| AGC | Automatic Generation Control |
| MGs | microgrid systems. |
| AO | Aquila Optimization |
| BFOA | Bacterial Forage Optimization Approach |
| COA | Coyote Optimization Approach |
| DoS | Denial-of-Service |
| DE | Differential Evolution |
| EAs | evolutionary algorithms |
| FA | Firefly Algorithm |
| KHA | krill-herd algorithm |
| LO | lion optimizer |
| MFA | moth–flame algorithm |
| RSA | reptile search algorithm |
| SSA | salp swarm algorithm |
| SGA | seagull algorithm |
| SMA | spider monkey algorithm |
| BAA | bat-inspired algorithm |
| CSA | cuckoo search algorithm |
| GHA | grasshopper algorithm |
| HHA | Harris hawks algorithm |
| AFA | artificial flora algorithm |
| PFA | paddy field algorithm |
| WHA | whale-inspired algorithm |
| GA | genetic algorithm |
| GNO | Global Neighborhood Optimization |
| GSO | Gravity Search Optimisation |
| GWO | Grey Wolf Optimizer |
| CIO | cohort intelligence optimization |
| GBD | governor dead band |
| GRC | generation rate constraint |
| hFA–PS | hybridized Firefly Algorithm pattern search |
| HBA | Honey Badger Algorithm |
| LFC | Load Frequency Control |
| LOA | Lyrebird Optimization Algorithm |
| MVO | Multi-Verse Optimizer |
| MHABC-PSO | Modified Artificial Bee Colony and Particle Swarm Optimizer |
| PI | Proportional–Integral |
| PID | Proportional–Integral–Double |
| PIDD | Proportional–Integral–Double Derivative |
| SAMPE | self-adaptive multi-population elitist |
| SLI | Step Load Increase |
| SMC | Sliding Mode Controller |
| TSA | Tunicate Searching Algorithm |
| TLBO | Teaching–Learning-Based Optimizer |
| ZN | Ziegler–Nichols |
| List of Symbols | |
| j | Subscript regarding areas (j = 1, 2) |
| ACE | area control error |
| R | droop characteristics of governor speed |
| B | frequency bias factors |
| u | control inputs to the governor as well as the output of controllers |
| Tg | governor time constant (second) |
| ∆Pg | changes in governor valve positions (p.u.) |
| Tt | turbine time constant (second) |
| ∆Pt | changes in turbine output powers (p.u.) |
| kp | power system gains |
| Tp | time constant of power system (second) |
| ∆PD | changes in the power demands (p.u.) |
| ∆PTIE | change in transferred power via tie-line (p.u.) |
| T12 | synchronisation coefficient between both areas |
| ∆f | frequency deviations of the system (Hz) |
| PRg | each area capacity in MW where g = 1 or 2 |
| Kp | proportional gain |
| Ki | integral gain |
| Kd | derivative gains |
| ITAE | integral of time multiplied by absolute error |
| tsim | time range of simulation |
Appendix A
References
- Ibrahim, N.M.A.; Talaat, H.E.A.; Shaheen, A.M.; Hemade, B.A. Optimization of Power System Stabilizers Using Proportional-Integral-Derivative Controller-Based Antlion Algorithm: Experimental Validation via Electronics Environment. Sustainability 2023, 15, 8966. [Google Scholar] [CrossRef]
- Abou El-Ela, A.A.; El-Sehiemy, R.A.; Shaheen, A.M.; Diab, A.E.G. Enhanced Coyote Optimizer-Based Cascaded Load Frequency Controllers in Multi-Area Power Systems with Renewable. Neural Comput. Appl. 2021, 33, 8459–8477. [Google Scholar] [CrossRef]
- Saadatmand, M.; Gharehpetian, G.B.; Siano, P.; Alhelou, H.H. PMU-Based FOPID Controller of Large-Scale Wind-PV Farms for LFO Damping in Smart Grid. IEEE Access 2021, 9, 94953–94969. [Google Scholar] [CrossRef]
- El-Sehiemy, R.; Shaheen, A.; Ginidi, A.; Al-Gahtani, S.F. Proportional-Integral-Derivative Controller Based-Artificial Rabbits Algorithm for Load Frequency Control in Multi-Area Power Systems. Fractal Fract. 2023, 7, 97. [Google Scholar] [CrossRef]
- Al-Majidi, S.D.; Al-Nussairi, M.K.; Mohammed, A.J.; Dakhil, A.M.; Abbod, M.F.; Al-Raweshidy, H.S. Design of a Load Frequency Controller Based on an Optimal Neural Network. Energies 2022, 15, 6223. [Google Scholar] [CrossRef]
- Rashidi, M.; Rashidi, F.; Arjomand, A.S.; Sahragard, J. Design of a Robust and Adaptive Load Frequency Controller for Multi-Area Power Networks with System Parametric Uncertainties Using TDMLP Neural Network. In Proceedings of the Conference Proceedings—IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; Volume 4. [Google Scholar]
- Yan, Z.; Xu, Y. A Multi-Agent Deep Reinforcement Learning Method for Cooperative Load Frequency Control of a Multi-Area Power System. IEEE Trans. Power Syst. 2020, 35, 4599–4608. [Google Scholar] [CrossRef]
- Ali, E.S.; Abd-Elazim, S.M. BFOA Based Design of PID Controller for Two Area Load Frequency Control with Nonlinearities. Int. J. Electr. Power Energy Syst. 2013, 51, 224–231. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. Optimal Gravitational Search Algorithm for Automatic Generation Control of Interconnected Power Systems. Ain Shams Eng. J. 2014, 5, 721–733. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. A Hybrid Firefly Algorithm and Pattern Search Technique for Automatic Generation Control of Multi Area Power Systems. Int. J. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]
- Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic Generation Control of Multi-Area Power Systems with Diverse Energy Sources Using Teaching Learning Based Optimization Algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 113–134. [Google Scholar] [CrossRef]
- Adel, A.A.E.E.; Ragab, A.E.S.; Abdullah, M.S.; Abd El Galil, D. Optimal Design of PID Controller Based Sampe-Jaya Algorithm for Load Frequency Control of Linear and Nonlinear Multi-Area Thermal Power Systems. Int. J. Eng. Res. Afr. 2020, 50, 79–93. [Google Scholar] [CrossRef]
- Salman, G.A.; Jafar, A.S.; Ismael, A.I. Application of Artificial Intelligence Techniques for LFC and AVR Systems Using PID Controller. Int. J. Power Electron. Drive Syst. 2019, 10, 1694–1704. [Google Scholar] [CrossRef]
- Sharma, J.; Hote, Y.V.; Prasad, R. PID Controller Design for Interval Load Frequency Control System with Communication Time Delay. Control Eng. Pract. 2019, 89, 154–168. [Google Scholar] [CrossRef]
- Abou El-Ela, A.A.; El-Sehiemy, R.A.; Shaheen, A.M.; Diab, A.E.G. Design of Cascaded Controller Based on Coyote Optimizer for Load Frequency Control in Multi-Area Power Systems with Renewable Sources. Control Eng. Pract. 2022, 121, 105058. [Google Scholar] [CrossRef]
- Murugesan, D.; Shah, P.; Jagatheesan, K.; Sekhar, R.; Kulkarni, A.J. Cohort Intelligence Optimization Based Controller Design of Isolated and Interconnected Thermal Power System for Automatic Generation Control. In Proceedings of the 2022 2nd International Conference on Computer Science, Engineering and Applications, ICCSEA 2022, Gunupur, India, 8 September 2022. [Google Scholar]
- Murugesan, D.; Jagatheesan, K.; Shah, P.; Sekhar, R. Fractional Order PIλDμ Controller for Microgrid Power System Using Cohort Intelligence Optimization. Results Control Optim. 2023, 11, 100218. [Google Scholar] [CrossRef]
- El-Rifaie, A.M.; Abid, S.; Ginidi, A.R.; Shaheen, A.M. Fractional Order PID Controller Based-Neural Network Algorithm for LFC in Multi-Area Power Systems. Eng. Rep. 2025, 7, e70028. [Google Scholar] [CrossRef]
- Iqbal, M.S.; Limon, M.F.A.; Kabir, M.M.; Rabby, M.K.M.; Soeb, M.J.A.; Jubayer, M.F. A Hybrid Optimization Algorithm for Improving Load Frequency Control in Interconnected Power Systems. Expert Syst. Appl. 2024, 249, 123702. [Google Scholar] [CrossRef]
- Saha, A.; Bhaskar, M.S.; Almakhles, D.J.; Elmorshedy, M.F. Employment of Renewable Based Sources in Amalgamated Frequency-Voltage Control Restructured System with TSA Trained IPD(1+I) Controller. Renew. Energy 2024, 222. [Google Scholar] [CrossRef]
- Ozumcan, S.; Ozturk, A.; Varan, M.; Andic, C. A Novel Honey Badger Algorithm Based Load Frequency Controller Design of a Two-Area System with Renewable Energy Sources. Energy Rep. 2023, 9, 272–279. [Google Scholar] [CrossRef]
- Mudi, J.; Shiva, C.K.; Mukherjee, V. Multi-Verse Optimization Algorithm for LFC of Power System with Imposed Nonlinearities Using Three-Degree-of-Freedom PID Controller. Iran. J. Sci. Technol.-Trans. Electr. Eng. 2019, 43, 837–856. [Google Scholar] [CrossRef]
- Sharma, Y.; Saikia, L.C. Automatic Generation Control of a Multi-Area ST—Thermal Power System Using Grey Wolf Optimizer Algorithm Based Classical Controllers. Int. J. Electr. Power Energy Syst. 2015, 73, 853–862. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Boopathi, D.; Samanta, S.; Anand, B.; Dey, N. Grey Wolf Optimization Algorithm-Based PID Controller for Frequency Stabilization of Interconnected Power Generating System. Soft Comput. 2024, 28, 5057–5070. [Google Scholar] [CrossRef]
- Akila, P.; Kumari, P.K.J.; Swetha, B.; Kavitha, E.; Mahesh, K.; Kumar, V.R. Lyrebird-Optimized PI Regulator for Enhanced Load Frequency Control in Two-Area Systems. In Proceedings of the 2024 IEEE International Conference on Information Technology, Electronics and Intelligent Communication Systems (ICITEICS), Bangalore, India, 28–29 June 2024. [Google Scholar]
- Sharma, A.; Singh, N. Load Frequency Control of Connected Multi-Area Multi-Source Power Systems Using Energy Storage and Lyrebird Optimization Algorithm Tuned PID Controller. J. Energy Storage 2024, 100, 113609. [Google Scholar] [CrossRef]
- Moras, A.; Sridhar, S.; Vernekar, M.M.; Debnath, U. Load Frequency Control of a Two Area Power System Using Different Optimization Techniques. In Proceedings of the Lecture Notes in Electrical Engineering, Chongqing, China, 3–5 April 2024; Volume 1098. [Google Scholar]
- Jain, D.; Bhaskar, M.K.; Parihar, M. Optimization of Controller Parameters for Load Frequency Control Problem of Two-Area Deregulated Power System Using Soft Computing Techniques. In Proceedings of the Smart Innovation, Systems and Technologies, Matsue City, Japan, 4–6 October 2024; Volume 364. [Google Scholar]
- Sagor, A.R.; Talha, M.A.; Ahmad, S.; Ahmed, T.; Alam, M.R.; Hazari, M.R.; Shafiullah, G.M. Pelican Optimization Algorithm-Based Proportional–Integral–Derivative Controller for Superior Frequency Regulation in Interconnected Multi-Area Power Generating System. Energies 2024, 17, 3308. [Google Scholar] [CrossRef]
- Tian, G.; Wang, F. Data-Driven Load Frequency Control for Multi-Area Power System Based on Switching Method under Cyber Attacks. Algorithms 2024, 17, 233. [Google Scholar] [CrossRef]
- Kumarakrishnan, V.; Vijayakumar, G.; Boopathi, D.; Jagatheesan, K.; Saravanan, S.; Anand, B. Optimized PSO Technique Based PID Controller for Load Frequency Control of Single Area Power System. Solid State Technol. 2020, 63, 7979–7990. [Google Scholar]
- Kumarakrishnan, V.; Vijayakumar, G.; Jagatheesan, K.; Boopathi, D.; Anand, B.; Kanendra Naidu, V. PSO Optimum Design-PID Controller for Frequency Management of Single Area Multi-Source Power Generating System. In Proceedings of the Lecture Notes in Networks and Systems, Amsterdam, The Netherlands, 1–2 September 2022; Volume 281. [Google Scholar]
- Dhanasekaran, B.; Kaliannan, J.; Baskaran, A.; Dey, N.; Tavares, J.M.R.S. Load Frequency Control Assessment of a PSO-PID Controller for a Standalone Multi-Source Power System. Technologies 2023, 11, 22. [Google Scholar] [CrossRef]
- Choudhary, R.; Rai, J.N.; Arya, Y. Automatic Generation Control for Single Area Power System Using GNA Tuned PID Controller. In Proceedings of the Journal of Physics: Conference Series, Taiwan, 21–23 May 2020; Volume 1478. [Google Scholar]
- Gupta, D.K.; Dei, G.; Soni, A.K.; Jha, A.V.; Appasani, B.; Bizon, N.; Srinivasulu, A.; Nsengiyumva, P. Fractional Order PID Controller for Load Frequency Control in a Deregulated Hybrid Power System Using Aquila Optimization. Results Eng. 2024, 23, 102442. [Google Scholar] [CrossRef]
- Song, T. Optimization Technology of Hydroelectric Power Plant Unit Speed Control Based on the Constriction Coefficient-Based Particle Swarm Gravitational Search Algorithm Fusion Model. Results Eng. 2024, 22, 102313. [Google Scholar] [CrossRef]
- Abdelaal, A.K.; Shaheen, A.M.; El-Fergany, A.A.; Alqahtani, M.H. Sliding Mode Control Based Dynamic Voltage Restorer for Voltage Sag Compensation. Results Eng. 2024, 24, 102936. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Goud, B.S.; Kumar, M.K.; Thakur, P.; Bajaj, M.; Bansal, R.C. Squirrel search algorithm based intelligent controller for interconnected power system. Int. J. Model. Simul. 2023, 1–21. [Google Scholar] [CrossRef]
- Naga Sai Kalyan, C.H.; Goud, B.S.; Reddy, C.R.; Udumula, R.R.; Bajaj, M.; Sharma, N.K.; Elgamli, E.; Shouran, M.; Kamel, S. Seagull Optimization Algorithm–Based Fractional-Order Fuzzy Controller for LFC of Multi-Area Diverse Source System with Realistic Constraints. Front. Energy Res. 2022, 10, 921426. [Google Scholar] [CrossRef]
- Irfan, M.; Deilami, S.; Huang, S.; Tahir, T.; Veettil, B.P. Optimizing Load Frequency Control in Microgrid with Vehicle-to-Grid Integration in Australia: Based on an Enhanced Control Approach. Appl. Energy 2024, 366, 123317. [Google Scholar] [CrossRef]
- Pham, T.H.; Raahemi, B. Bio-Inspired Feature Selection Algorithms With Their Applications: A Systematic Literature Review. IEEE Access 2023, 11, 43733–43758. [Google Scholar] [CrossRef]
- Dehghani, M.; Bektemyssova, G.; Montazeri, Z.; Shaikemelev, G.; Malik, O.P.; Dhiman, G. Lyrebird Optimization Algorithm: A New Bio-Inspired Metaheuristic Algorithm for Solving Optimization Problems. Biomimetics 2023, 8, 507. [Google Scholar] [CrossRef]
- Abid, S.; El-Rifaie, A.M.; Elshahed, M.; Ginidi, A.R.; Shaheen, A.M.; Moustafa, G.; Tolba, M.A. Development of Slime Mold Optimizer with Application for Tuning Cascaded PD-PI Controller to Enhance Frequency Stability in Power Systems. Mathematics 2023, 11, 1796. [Google Scholar] [CrossRef]
- Alqahtani, M.H.; Almutairi, S.Z.; Aljumah, A.S.; Shaheen, A.M.; Moustafa, G.; El-Fergany, A.A. A Proportional-Integral-One Plus Double Derivative Controller-Based Fractional-Order Kepler Optimizer for Frequency Stability in Multi-Area Power Systems with Wind Integration. Fractal Fract. 2024, 8, 323. [Google Scholar] [CrossRef]
- Moustafa, G.; El-Rifaie, A.M.; Smaili, I.H.; Ginidi, A.; Shaheen, A.M.; Youssef, A.F.; Tolba, M.A. An Enhanced Dwarf Mongoose Optimization Algorithm for Solving Engineering Problems. Mathematics 2023, 11, 3297. [Google Scholar] [CrossRef]
- El-Rifaie, A.M.; Shaheen, A.M.; Tolba, M.A.; Smaili, I.H.; Moustafa, G.; Ginidi, A.R.; Elshahed, M.A. Modified Gradient-Based Algorithm for Distributed Generation and Capacitors Integration in Radial Distribution Networks. IEEE Access 2023, 11, 120899–120917. [Google Scholar] [CrossRef]
- Moustafa, G.; Tolba, M.A.; El-Rifaie, A.M.; Ginidi, A.; Shaheen, A.M.; Abid, S. A Subtraction-Average-Based Optimizer for Solving Engineering Problems with Applications on TCSC Allocation in Power Systems. Biomimetics 2023, 8, 332. [Google Scholar] [CrossRef]
- Alsaggaf, W.; Gafar, M.; Sarhan, S.; Shaheen, A.M.; Ginidi, A.R. Chemical-Inspired Material Generation Algorithm (MGA) of Single- and Double-Diode Model Parameter Determination for Multi-Crystalline Silicon Solar Cells. Appl. Sci. 2024, 14, 8549. [Google Scholar] [CrossRef]
- Chaib, L.; Tadj, M.; Choucha, A.; El-Rifaie, A.M.; Shaheen, A.M. Hybrid Brown-Bear and Hippopotamus Algorithms with Fractional Order Chaos Maps for Precise Solar PV Model Parameter Estimation. Processes 2024, 12, 2718. [Google Scholar] [CrossRef]
- Moustafa, G.; Alnami, H.; Ginidi, A.R.; Shaheen, A.M. An Improved Kepler Optimization Algorithm for Module Parameter Identification Supporting PV Power Estimation. Heliyon 2024, 10, e39902. [Google Scholar] [CrossRef] [PubMed]
- Alwakeel, A.S.; El-Rifaie, A.M.; Moustafa, G.; Shaheen, A.M. Newton Raphson Based Optimizer for Optimal Integration of FAS and RIS in Wireless Systems. Results Eng. 2025, 25, 103822. [Google Scholar] [CrossRef]
- De Mel, I.; Klymenko, O.V.; Short, M. Complementarity Reformulations for the Optimal Design of Distributed Energy Systems with Multiphase Optimal Power Flow. Int. J. Electr. Power Energy Syst. 2024, 155, 109610. [Google Scholar] [CrossRef]
- Gao, M.; Yu, J.; Yang, Z.; Zhao, J. A Physics-Guided Graph Convolution Neural Network for Optimal Power Flow. IEEE Trans. Power Syst. 2024, 39, 380–390. [Google Scholar] [CrossRef]
- Shaheen, A.M.; El-Sehiemy, R.A.; Hasanien, H.M.; Ginidi, A. An Enhanced Optimizer of Social Network Search for Multi-Dimension Optimal Power Flow in Electrical Power Grids. Int. J. Electr. Power Energy Syst. 2024, 155, 109572. [Google Scholar] [CrossRef]
- Alqahtani, M.H.; Draz, A.; Shaheen, A.M.; El-Fergany, A.A. Advanced Relay Coordination in Power Networks Considering Transformer Inrush and Motor Starting Currents via Weighted Mean Variance Optimizer. IEEE Access 2024, 12, 184953–184975. [Google Scholar] [CrossRef]
- Nasef, A.F.; Alqahtani, M.H.; Shaheen, A.M. Technical and Optimization Insights into PV Penetration in Power Distribution Systems-Based Wild Horse Algorithm: Real Cases on Egyptian Networks. Results Eng. 2025, 25, 104603. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | |||||
| Respective area | Area 1 | Area 2 | |||
| Controller | PIDn | PI | PIDn | PI | |
| Controller parameters | KP | 2.3386 | −0.2664 | −0.1724 | 0.0317 |
| Ki | 0.8145 | 0.5193 | −0.00718 | −0.185 | |
| Kd | 0.8913 | - | 0.4242 | - | |
| n | 200 | - | 124.667 | - | |
| Case 2 | |||||
| Respective area | Area 1 | Area 2 | |||
| Controller | PIDn | Controller | PIDn | PI | |
| Controller parameters | KP | 2.105 | −0.316 | 3.574 | 0.2433 |
| Ki | 0.794 | 0.4861 | 2.3855 | 0.5833 | |
| Kd | 0.7899 | - | 1.54 | - | |
| n | 200 | - | 81.63 | - | |
| Techniques/Parameters | Settling Times (s) | |||
|---|---|---|---|---|
| ITAE | ∆PTIE | ∆F2 | ∆F1 | |
| FA-PID [10] | 0.3240 | 4.3 | 4.9 | 3.1 |
| BFOA-PID [8] | 0.4788 | 5.1 | 6.4 | 4.7 |
| ZN-PI [8] | 0.6040 | 6.7 | 9.2 | 8.1 |
| GA-PID [8] | 0.5513 | 5.7 | 8 | 6.9 |
| hFA–PS-tuned PID [10] | 0.2782 | 4 | 4.5 | 2.8 |
| SAMPE-Jaya-tuned PID [12] | 0.2078 | 3.1192 | 2.8659 | 2.7144 |
| LOA-tuned PI | 0.4231 | 5.1 | 5.54 | 5.4 |
| Proposed LOA-tuned PIDn | 0.2048 | 3.2 | 2.16 | 2.8 |
| Fitness Function | ITAE | ||
|---|---|---|---|
| Optimisation Technique | LOA-Tuned PI | LOA-Tuned PIDn | |
| ITAE | 0.5442 | 0.2245 | |
| Settling times (s) | ∆F1 | 4.7414 | 2.2573 |
| ∆F2 | 7.2896 | 2.7583 | |
| ∆PTIE | 7.6936 | 2.7862 | |
| GRC = ±0.025 | |||||
| Respective Area | Area 1 | Area 2 | |||
| Controller | PIDn | PI | PIDn | PI | |
| KP | 1 | −0.3308 | −0.671 | −0.9387 | |
| Controller | Ki | 0.3928 | 0.385 | −0.0032 | −0.0005 |
| parameters | Kd | 0.6574 | - | −0.025 | - |
| n | 200 | - | 171.42 | - | |
| Techniques/Parameters | Settling Times (s) | |||
|---|---|---|---|---|
| ITAE | ∆F1 | ∆F2 | ∆PTIE | |
| Conventional ZN-PI [8] | 3.4972 | 15.3 | 14.1 | 15.3 |
| GA-tuned PID [8] | 2.4668 | 11.1 | 11.2 | 11.0 |
| BFOA-tuned PID [8] | 1.5078 | 9.0 | 7.9 | 8.3 |
| FA-tuned PID [10] | 0.8023 | 7.8 | 6.3 | 7.9 |
| hFA–PS-tuned PID [10] | 0.7405 | 6.9 | 5.2 | 7.5 |
| TLBO-tuned IDD [11] | 0.7400 | 7.3 | 4.9 | 6.5 |
| TLBO-tuned PIDD [11] | 0.6798 | 6.8 | 3.9 | 6.5 |
| LOA-tuned PI | 0.732 | 4.7 | 5.4 | 5.2 |
| Proposed LOA-tuned PID | 0.5841 | 4.5 | 2.9 | 4.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Rifaie, A.M. A Novel Lyrebird Optimization Algorithm for Enhanced Generation Rate-Constrained Load Frequency Control in Multi-Area Power Systems with Proportional Integral Derivative Controllers. Processes 2025, 13, 949. https://doi.org/10.3390/pr13040949
El-Rifaie AM. A Novel Lyrebird Optimization Algorithm for Enhanced Generation Rate-Constrained Load Frequency Control in Multi-Area Power Systems with Proportional Integral Derivative Controllers. Processes. 2025; 13(4):949. https://doi.org/10.3390/pr13040949
Chicago/Turabian StyleEl-Rifaie, Ali M. 2025. "A Novel Lyrebird Optimization Algorithm for Enhanced Generation Rate-Constrained Load Frequency Control in Multi-Area Power Systems with Proportional Integral Derivative Controllers" Processes 13, no. 4: 949. https://doi.org/10.3390/pr13040949
APA StyleEl-Rifaie, A. M. (2025). A Novel Lyrebird Optimization Algorithm for Enhanced Generation Rate-Constrained Load Frequency Control in Multi-Area Power Systems with Proportional Integral Derivative Controllers. Processes, 13(4), 949. https://doi.org/10.3390/pr13040949