1. Introduction
Path planning for mobile robots is a significant subject in robotics research, having widespread applications in contemporary technology [
1]. It makes autonomous navigation and task execution possible, including the handling of commodities in warehouses and the transportation of materials in factories and manufacturing processes. This capability greatly improves production efficiency and workplace productivity [
2]. Path planning enables mobile robots to dynamically adjust their paths using real-time environmental data, such as sensor feedback, to avoid obstacles and hazards. This feature is crucial in complex environments, including disaster rescue, medical care, and exploration missions [
3]. Effective path planning minimizes energy consumption and operating time, reducing costs and prolonging equipment lifespan. Research on mobile robot path planning advances automation and artificial intelligence while fostering interdisciplinary applications in fields like machine vision, sensor technology, and deep learning [
4].
Dijkstra’s algorithm [
5], the artificial potential field technique, the RRT algorithm [
6], simulated annealing, the A* algorithm, and the genetic particle algorithm [
7] are examples of traditional path planning methods. Dijkstra’s algorithm effectively solves the single-source shortest path problem and is both simple to implement and understand [
8]. However, it consumes substantial memory and computational resources for large-scale graphs (with numerous nodes and edges), leading to inefficiency. It is common practice to use the artificial potential field approach in situations that call for high real-time performance and settings that are reasonably stable or that change slowly [
9]. However, its susceptibility to being trapped in local minima or suboptimal solutions often results in failure. The A* algorithm is a well-known and efficient heuristic search method for graph traversal [
10]. It uses a priority queue to select paths and is extensively applied in path planning, artificial intelligence, and robotic navigation. By combining breadth-first search and greedy algorithm features, it ensures efficiency while guaranteeing optimal solutions. The simulated annealing algorithm, a probabilistic optimization method, is computationally simple, highly versatile [
11], and robust. It supports parallel processing and effectively addresses complex nonlinear optimization problems. However, its slow convergence speed, lengthy execution time, and sensitivity to initial parameters introduce uncertainty into the solving process. With increasing grid size complexity and computational demands, traditional path planning algorithms struggle to meet requirements. The ant colony algorithm, artificial fish crowd algorithm, and bird flocking method are examples of biomimetic path planning algorithms [
12] that often rely on variables like pheromone concentration and inter-individual communication frequency. Selecting these parameters typically demands experience and experimentation; domain-specific adjustments are often required, complicating algorithm design and optimization.
Dorigo et al. created the ant colony algorithm [
13], an established heuristic technique for robot route planning that imitates ant foraging behavior. The method has drawbacks, including sluggish early convergence, search stagnation, and vulnerability to local optima, despite its benefits, which include distributed computing, parallelism, and great flexibility. In the past few decades, academics have suggested a number of changes to address these issues. To tackle difficult problems such as the Traveling Salesman Problem (TSP) and airport gate allocation, Wu et al. [
14] introduced an expanded cooperative co-evolutionary ant colony optimization method (MSICEAO). To improve convergence speed and solution quality, the method uses techniques such adaptive pheromone evaporation updates, weighted pheromone initialization, elite retention, and multi-population co-evolution. Experimental results indicate that MSICEAO surpasses five advanced algorithms in optimization capability. An increased adapted ant colony algorithm (IAACO) for route planning optimization was created by Miao et al. [
15]. The method reformulates route planning as an optimization issue with multiple goals for comprehensive solutions, improving convergence velocity and search capacity by integrating angle-guiding and obstacle-exclusion components. Experimental results confirm that IAACO achieves global path optimization across various environments, exhibiting high real-time performance and stability. Wu et al. [
16] introduced the MAACO algorithm, an improved adaptive ant colony optimization method for path planning, to address the issues of optimum locality and delayed convergence in traditional methods. By using a directed heuristic mechanism, a new heuristic function, dynamic pseudo-random guidelines, and a non-uniform pheromone distribution, the program increases search efficiency and global optimality. Experimental results demonstrate that MAACO surpasses existing algorithms by achieving shorter paths, fewer turns, and faster convergence. Zhang et al. [
17] developed a vessel navigation method that leverages AIS (Automatic Identification System) data to construct a high-precision environmental model for shortest-path computation by combining the ant colony algorithm (ACA) with the A* search. The method determines the initial path area with ACA, applies A* to find the shortest path, and optimizes it using Bézier curves. Experimental results confirm that this method efficiently plans shorter routes, validating its applicability. DYACO, an improved ant colony optimization method for underwater extraction equipment navigation, was presented by Liang et al. [
18]. It was developed in order to circumvent the issues of local optimum and slow convergence that are associated with current algorithms. DYACO outperforms traditional algorithms by achieving a
decrease in turns and a
reduction in path length. By combining non-uniform pheromone initiation and pseudo-random state transition criteria, Luo et al. [
19] improved the ant colony algorithm for mobile robot route planning. Gao et al. [
20] introduced the EH-ACO method, enhancing ant colony optimization through four principal tactics and attaining remarkable outcomes in intricate route planning situations. In prior studies, such as Karakostas and Sifaleras (2022) et al. [
21], advanced metaheuristics like the GA for TSP were exploreed but faced challenges in real-world multi-constraint routing. Building on Malik and Kim’s (2019) [
22] trip optimization framework, this study introduces a hybrid GA combining Position-Based and One-Point Crossover (PBX + OX1), validated on Konya’s bus transit data. Results demonstrate PBX + OX1 (Bolotbekova et al., 2025) [
23] outperforms ABC (Karaboga, 2005) [
24], ACO (Dorigo et al., 2006) [
25], and PSO (Kennedy & Eberhart, 1995) [
26], achieving the shortest feasible route (70.59 km) with enhanced convergence.
To fully leverage the performance metrics of robots in real-world scenarios, a global path planning algorithm that accommodates robotic kinematic constraints is essential [
27]. Li et al. [
28] presented the IACO-IABC technique, which effectively integrates the advantages of ACO and ABC to handle efficiency and optimization challenges in mobile robot route planning. It excels in minimizing turns and enhancing convergence speed. Wu et al. [
29] proposed a temperature parameter and an automated annealing procedure that improved the traditional artificial potential field method, culminating in the DA-APF algorithm. Simulation investigations in U-shaped obstacle situations and intricate settings confirmed the superiority of the DA-APF algorithm. It demonstrated considerable benefits in path length, route length of time, and success rate, successfully addressing the local minima problem in mobile robot path planning. Using Q-learning to continuously change the coefficients of weight within the DWA algorithm, Kobayashi et al. [
30] presented a novel path planning method for mobile robots functioning in complex scenarios. Simulation and experimental comparisons indicate that DQDWA outperforms alternatives under various environmental conditions, particularly in crowded settings, effectively avoiding collisions and identifying shorter paths. By adding a combination of the global search method and adaptive dynamic zone searches to the NSGA-II approach, Duan et al. [
31] improved the performance of mobile robots in multi-objective route planning. Extensive simulations show that the INSGA-II algorithm surpasses existing multi-objective evolutionary algorithms across various metrics, proving its efficacy in complex path planning. By fusing the artificial potential field approach with Q-learning, Orozco-Rosas et al. [
32] created the QAPF algorithm, which greatly enhanced the performance of mobile robot path planning. Li et al. [
33] introduced the MAGAT model, integrating Graph Attention Networks (GATs) into multi-robot path planning to enhance efficiency and success rates in complex environments. Wang et al. [
34] presented G2RL, a novel hierarchical route planning method that combines local reinforcement learning with global guidance, to address path planning issues in uncertain circumstances.
Previous research indicated a substantial improvement in the average convergence rate of the ant colony method and a substantial reduction in route length relative to traditional versions. However, the ant colony algorithm still struggles to meet the kinematic constraints of mobile robots in certain cases. In this study, improvements are provided that aim to reduce the number of path twists and maintain compliance with the kinematic constraints that mobile robots are subject to. The following is a summary of the most important contributions that this study makes:
- (a)
It is recommended that a better ant colony algorithm be developed in order to overcome the constraints of previous implementations. These disadvantages include inadequate global search efficiency, slow convergence, and sensitivity to local minima in complicated situations. For resolving these constraints, a new heuristic formula is devised that includes the squared distance between the current and destination goals. Additionally, an enhanced Tanh function is employed to optimize the pheromone evaporation process. The pheromone update strategy is refined using an optimal–worst ant system, improving pheromone distribution. Finally, a pheromone diffusion model is introduced to enhance ant search capabilities and avoid stagnation in suboptimal solutions.
- (b)
To account for the kinematic constraints of mobile robots, collision avoidance mechanisms and B-spline curves are integrated to maintain safe distances from obstacles. The B-spline formula is improved, enabling control points to adjust away from obstacles while maintaining path smoothness and adhering to the robot’s angular constraints.
By integrating these mechanisms, a new ant colony algorithm (Improved-ACO) is developed. The paths generated by Improved-ACO are compared with those from traditional and enhanced algorithms on various maps, validating its effectiveness and superiority.
The order in which the sections of this paper are presented is found below.
Section 2 presents the principles of the conventional ant colony algorithm, establishing a foundation for future enhancements.
Section 3 details the specific content of the four improvement mechanisms.
Section 4 presents the specific measures for path smoothing.
Section 5 outlines the overall process of Improved-ACO.
Section 6 performs simulated studies that evaluate the algorithm’s superiority. Finally,
Section 7 presents the conclusions of the conducted research.
4. Path Smoothing
This paper presents a solution that combines a collision avoidance mechanism with B-spline curves to satisfy the kinematic restrictions of mobile robots and address the problem of discontinuous route curvature. The collision avoidance mechanism addresses the dead-end problem in the ant colony algorithm, preventing mobile robots from colliding with obstacles in practical scenarios. Additionally, when using the ant colony algorithm to generate paths for mobile robots, the curvature at path waypoints is often discontinuous, negatively impacting the robot’s movement. This paper utilizes B-spline curves to smooth the path and incorporates a control point adjustment formula based on the distance between control points and obstacle centers. This adjustment ensures that the generated path satisfies the robot’s kinematic constraints in practical scenarios.
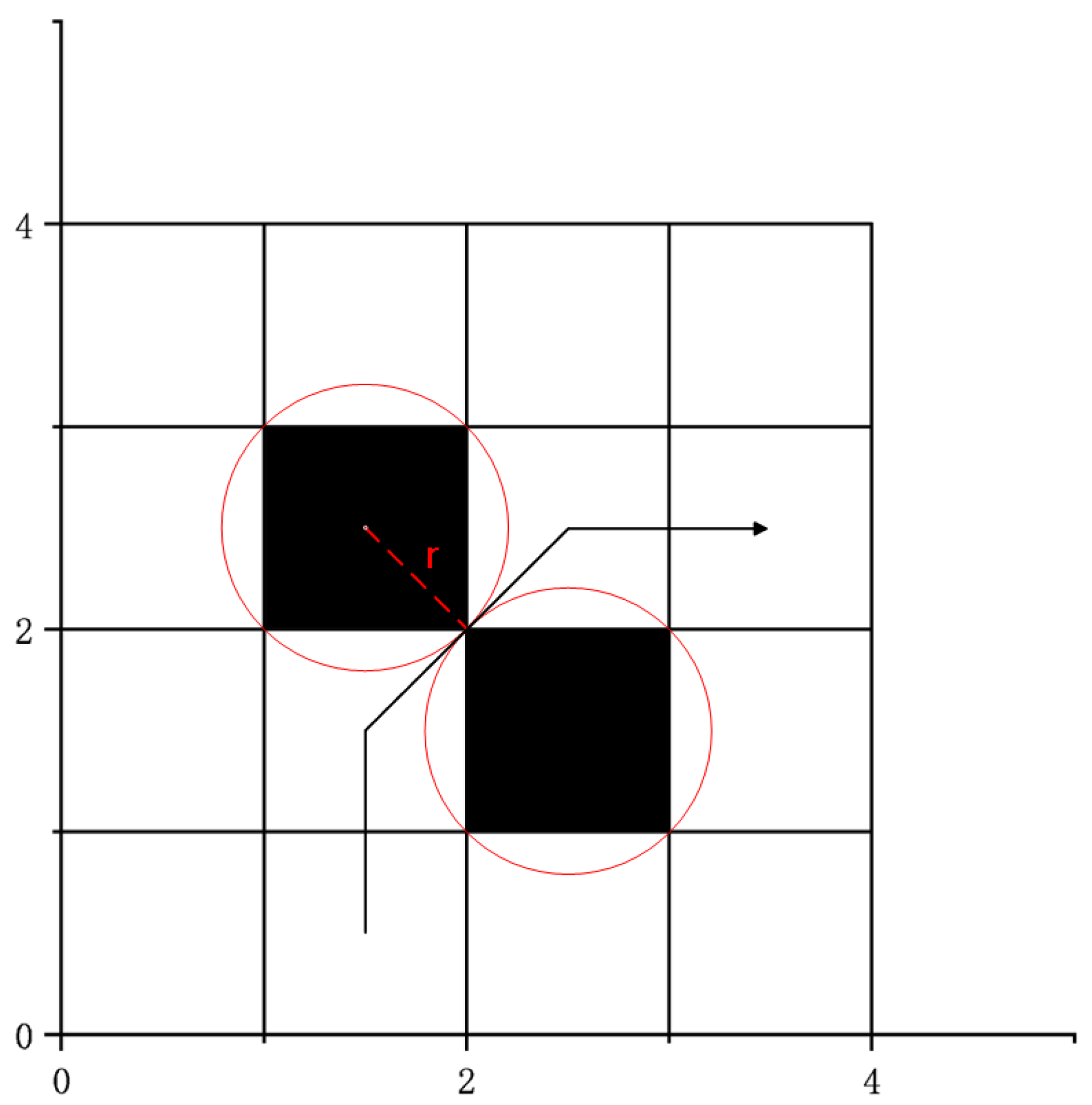
4.1. Anti-Collision
Figure 5 indicates that two obstacle vertices are often connected when the ant colony method is used for path planning on a grid map. If the planned path crosses the connection between these obstacle vertices, it may cause a collision between the robot’s moving frame and the obstacles, rendering it unsuitable for real-world applications. Therefore, considering the actual distance
between grid nodes and obstacles and its relationship with the safety distance
D, this paper introduces a collision avoidance mechanism for the robot. In order to ascertain whether or not the way is safe, the distance between the obstacle center and the path is taken into consideration. For example, connecting nodes
A and
B form segment
, and the distance
(
) between segment
and obstacle point
O is evaluated. If
, the alternative option is eliminated.
Figure 6 illustrates a schematic representation of the collision avoidance method. Here, the obstruction’s radius is indicated by
r.
L is the distance between
, and
is the distance between the path
and the obstacle’s center
O. The distance
from obstacle point
O to path
is calculated using Equations (16)–(18) as follows:
In Equations (16)–(18), is the angle between segment and the line mapped to the horizontal axis by segment . One can determine the safety distance D () for anti-collision, and the evaluative connection between distance and safety distance d as follows:
- (1)
If , the path is ignored;
- (2)
If , the path is selected.
4.2. B-Spline Smoothing Path
This study utilizes a grid map as the habitat for the ant colony method. The path planning lines produced by the enhanced ant colony algorithm often display spikes at inflection points. In such cases, the path curvature becomes discontinuous, violating the robot’s kinematic constraints. B-spline curves [
38] are employed for path optimization. Such curves offer advantages such as simple parameterization, local modification, and convexity. The cubic quasi-uniform B-spline curve is often used to make sure that the best path goes through both the starting point and the end point while staying smooth and continuous. The B-spline curve is defined in Equation (
19). When
, it becomes a cubic quasi-uniform B-spline curve, as defined in Equation (
20).
where
is the generated curve,
is the control point, the B-spline’s basis function is
, and
k is the degree. The basis function
is calculated by using a recursive formula. For the cubic basis function, the recursive Equations (21)–(22) are as follows:
where
is the node vector. Therefore, when
, the Equation (
23) of cubic B-spline curve is as follows:
When a collision of the produced spline with an obstacle (
) occurs, the control point must be modified to shift in the direction opposite to the impediment, thus guaranteeing the spline maintains a safe distance (
). The vector normalization Equations (24) and (25) from the control point
(
) to the obstacle center point
(
) are as follows:
Equation (
26) of the control point movement is as follows:
where
is a small control quantity, which is used to ensure that the control point is far away from obstacles.
4.3. Steps for Path Smoothing
The following are the path smoothing steps using the anti-collision mechanism and B-spline curve:
Step 1: output preliminarily generated path points (discrete path point sequence);
Step 2: traverse each segment of path nodes ;
Step 3: extract path key points (such as initial point, target point, inflection point) from the generated path as the control point set ;
Step 4: set spline degree k to generate node vectors ;
Step 5: traverse the parameter value t, recursively calculate the basis function , and calculate the smooth curve point ;
Step 6: calculate the actual distance from the obstacle center O to the line segment . If , ignore the path, regenerate the path, and return to the first step. If , the path is selected;
Step 7: output the smooth path points .
In addition, the pseudocode on smoothing paths is on page 14:
| Pseudocode of the path smoothing |
| 1. Establish the initialization environment, and define the map size, starting point and ending point, obstacle position and safe distance; |
| 2. Run the improved ant colony algorithm to generate the initial path; |
| 3. For
do |
| 4. If Safe Path [i] is turning point |
| 5. Add Safe Path [i] to the control point set Control Points; |
| 6. End If |
| 7. End For |
| 8. For
|
| 9. If then |
| 10. |
| 11. else |
| 12. |
| 13. End If |
| 14. End for |
| 15. For each obstacle center point O, calculate the distance to the path do |
| 16. If then |
17. Calculate the movement direction vector;
|
18. Calculate the adjustment distance;
|
19. Adjusted control points;
|
20. Else
Adjusted Control Points.Append |
| 21. End If |
| 22. End For |
| 23. For |
24. Calculate smooth curve points;
|
| 25. End For |
| 26. output smooth path |
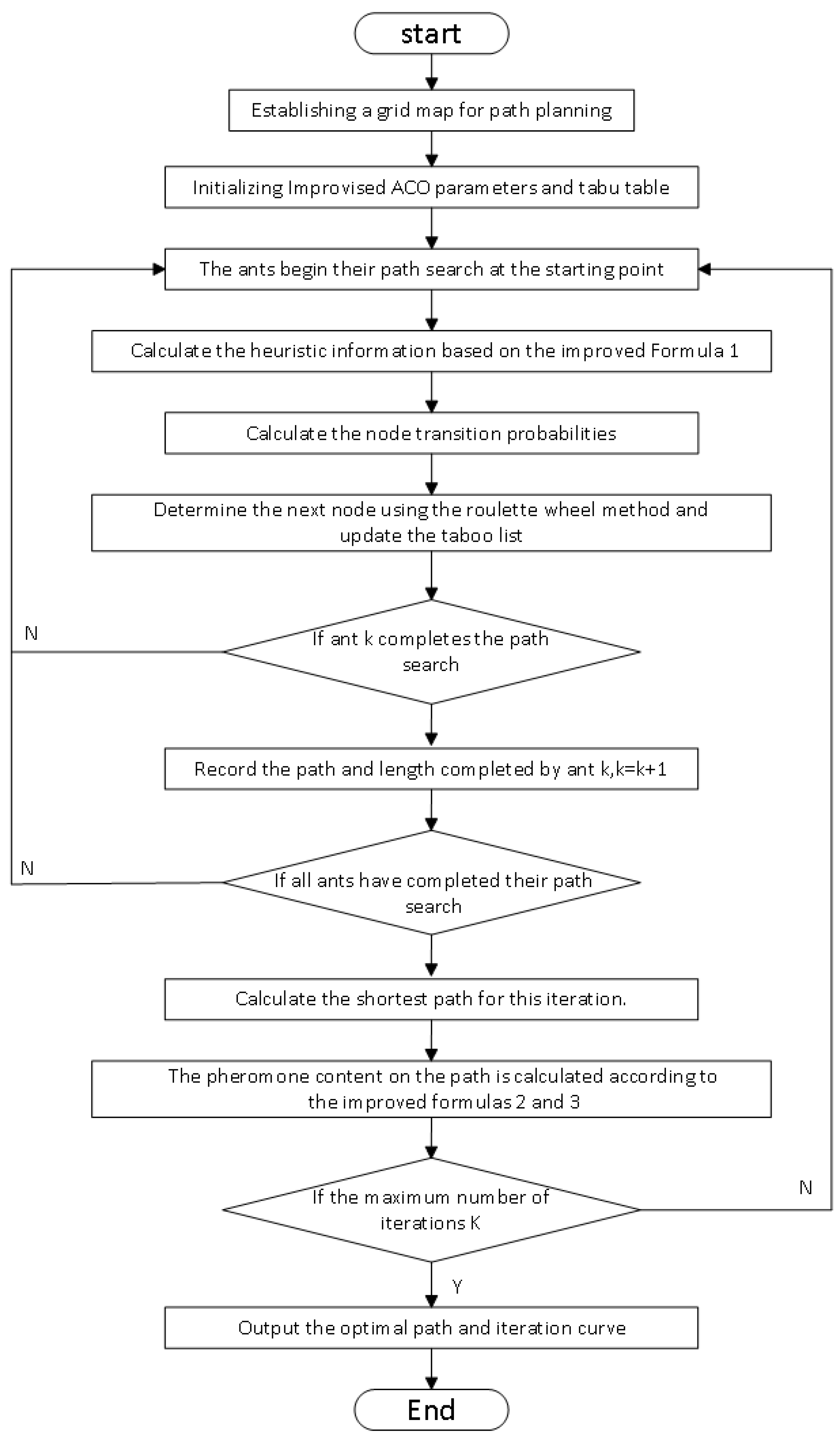
5. Overall Process of Improved-ACO
The Improved-ACO consists of three phases: environmental modeling, first route generation with an enhanced ant colony algorithm, and optimization of the initial path through a smoothing methodology. The overall process of the algorithm is as follows:
Step 1: The grid approach is used to generate the route planning map by partitioning the environment into grids, each represented by a coordinate. A value of 0 signifies an unoccupied region (white-filled), while 1 indicates an obstructed area (black-filled). For grid numbering, a correspondence is established between the grid serial numbers and their corresponding actual coordinates.
Step 2: For parameter initialization, set the optimum number of iterations and the number of ants so they are both defined. Initialize the pheromone matrix, and define the pheromone volatilization factor and the important heuristic factors and .
Step 3: Utilize the enhanced heuristic information formula by integrating the square of the distance between the current node and the destination node, while dynamically modifying the weight of the heuristic information.
Step 4: The ant starts at the origin, updates the path selection matrix, records the path length, and the state transition probability formula is used to determine which node will be the next one to be selected.
Step 5: Local update involves adjusting the pheromone level according to the path length to minimize redundant searches. The global update implements a sophisticated ant method to augment pheromone levels along the ideal path, and a dynamic pheromone volatilization factor is employed to prevent local optimization.
Step 6: Use a cubic B-spline curve for route optimization after extracting important points from the path produced by the ant colony method, such as the start point, inflection point, and terminus.
Step 7: If the generated spline conflicts with an obstacle (where ), adjust the control point by moving it away from the obstacle until .
Step 8: Output the generated path and end the algorithm.
6. Simulation Experiment and Comparative Analysis
In this section, a simulation environment is developed using . The efficacy of path planning with the enhanced ant colony algorithm is validated, and its performance contrasted with other methods.
The grid map is defined with sizes of , , and , with each grid cell measuring . The traversable area is represented by white grids and obstacles by black grids. A red grid indicates the terminal site, while a yellow grid indicates the starting node.
Parameter initialization in the ant colony algorithm lacks theoretical foundations and is typically determined through empirical values, experimental comparisons, and literature references. To identify appropriate initialization parameters, key parameters of the improved ACO algorithm are evaluated through statistical tests and comparative experiments. In each experiment, only one parameter is varied while others are held constant to isolate its impact. The simulations were conducted for each parameter combination. The examination of the primary parameters in the enhanced ACO algorithm determines the ideal configuration: , , , , , , , , , , , .
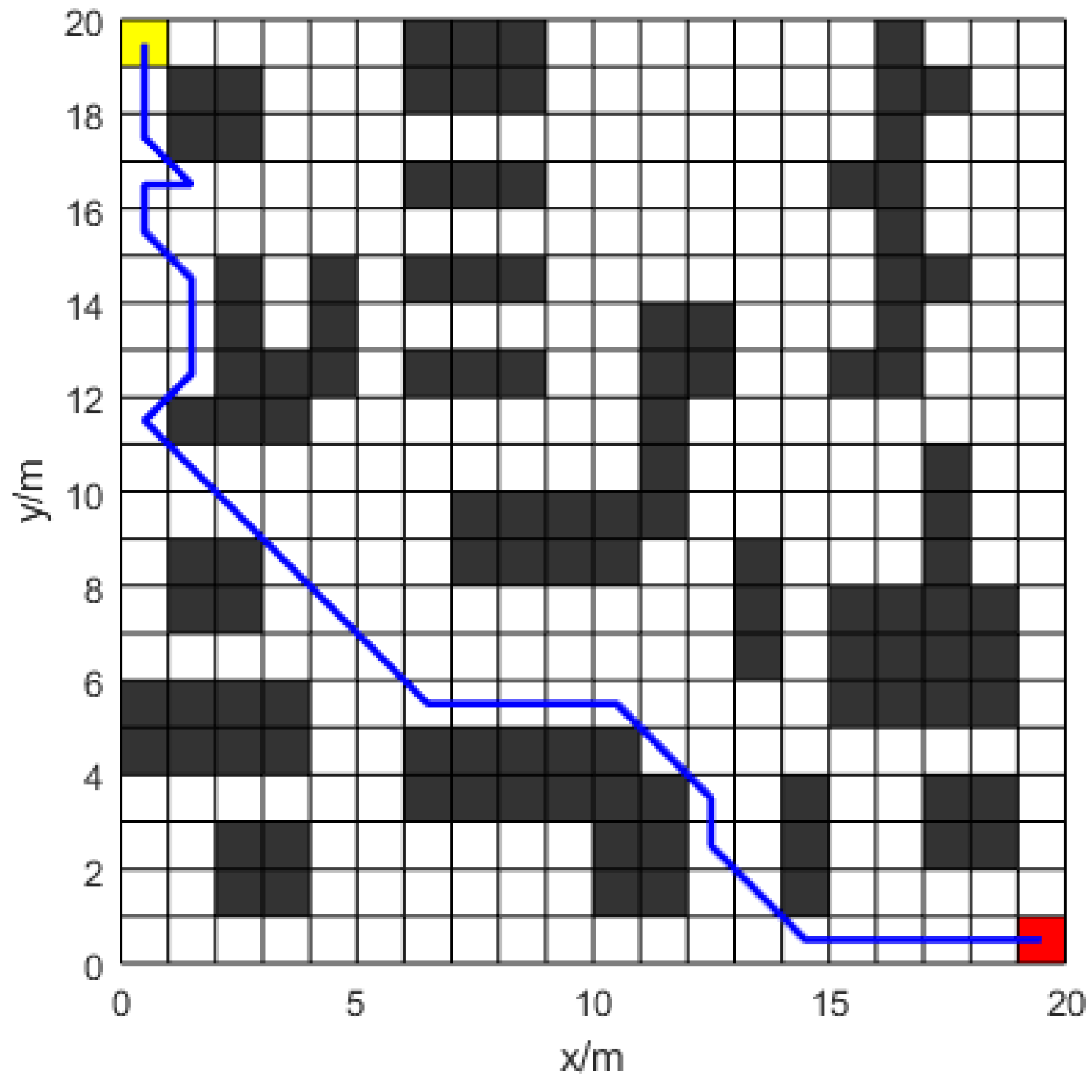
6.1. Simulation Experiment 1
In simulation experiment 1, the Improved-ACO is evaluated against the standard ACO method, the A* algorithm, and Dijkstra’s algorithm. Each algorithm and its performance criteria are assessed on a
grid map.
Table 1 provides a summary of the performance metrics with regard to each algorithm:
As shown in
Figure 7,
Figure 8,
Figure 9 and
Figure 10, the paths generated by the unimproved ant colony algorithm exhibit cross-generation due to insufficient heuristic information, causing ants to wander in certain areas. The Dijkstra and A* algorithms prioritize shorter paths toward the target but often neglect obstacles, leading to more path turns. The Improved-ACO has a path length
longer than Dijkstra’s algorithm and
longer than the A* algorithm but achieves
fewer turns than Dijkstra’s and
fewer than the A* algorithm. Additionally, the anti-collision device maintains a safe distance between the mobile robot and obstructions, therefore averting collisions.
Table 1 shows that the Dijkstra and A* algorithms require larger search spaces, whereas the Improved-ACO algorithm identifies near-optimal paths within smaller search spaces, demonstrating higher resource efficiency. The Improved-ACO algorithm demonstrates a reduction of
in iterations and exhibits accelerated convergence relative to the traditional ACO method.
6.2. Simulation Experiment2
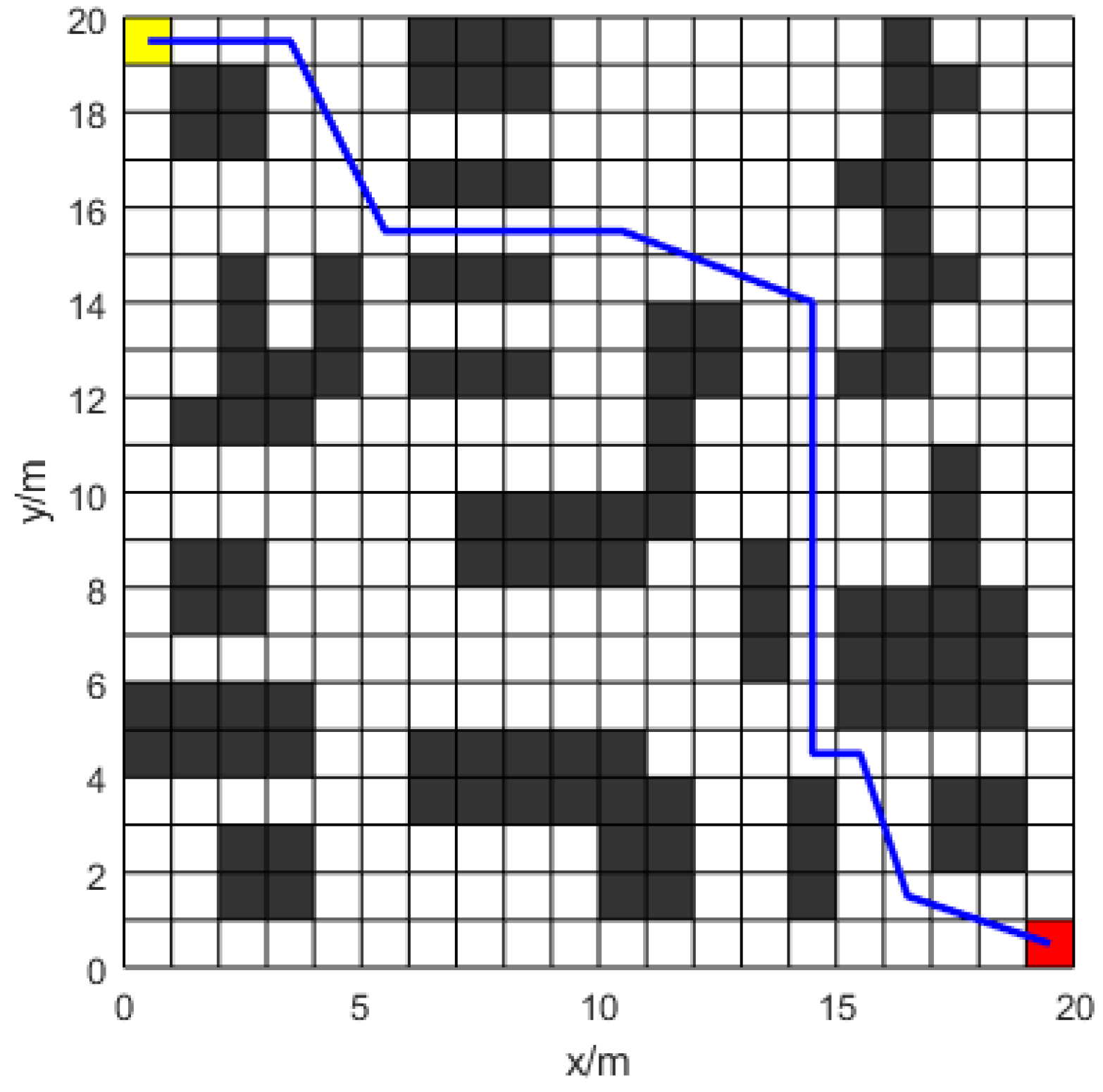
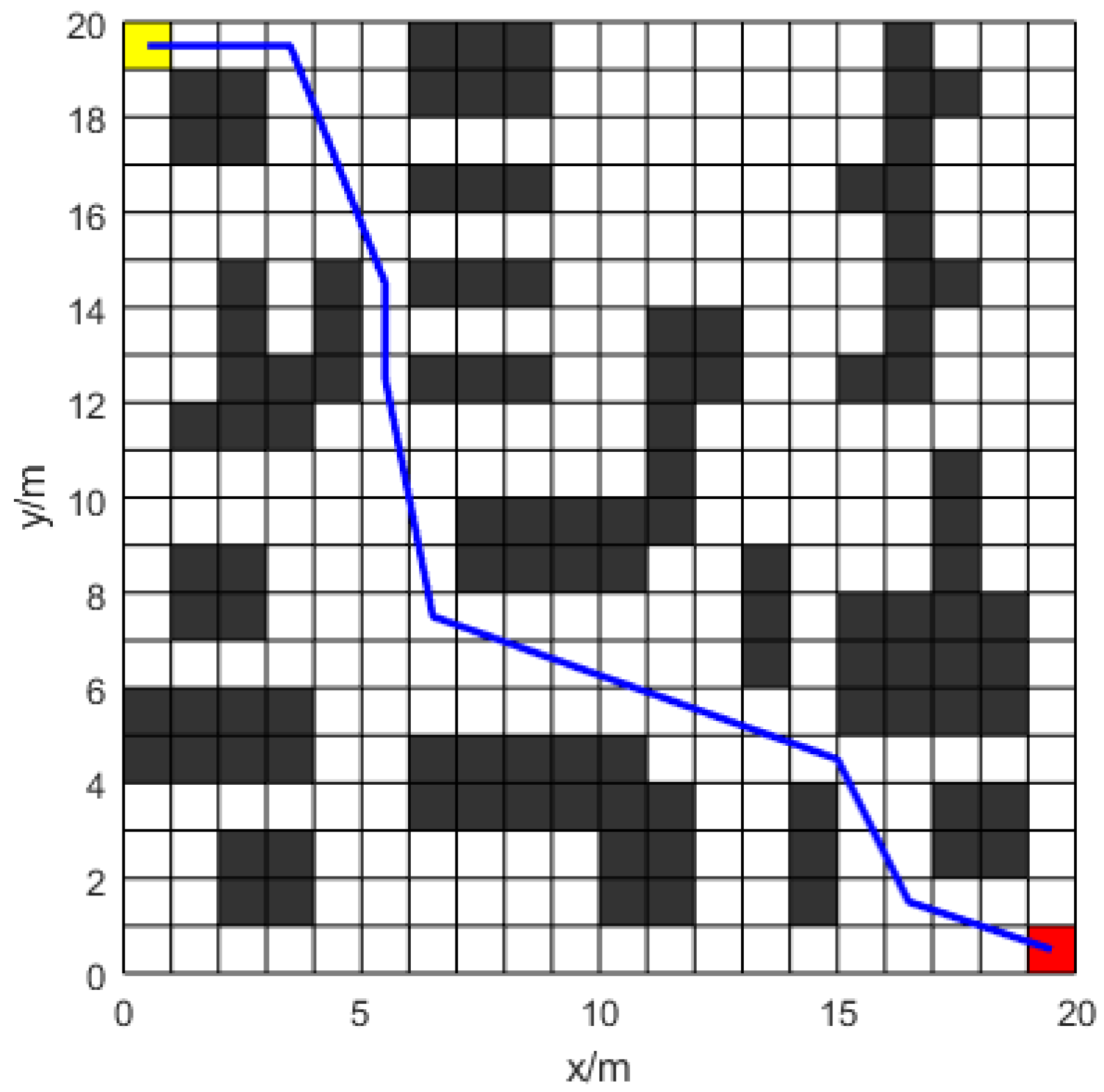
A grid map was used for a gradient comparison experiment. The gradient experiment seeks to evaluate the efficacy of the suggested enhancements, which are progressively integrated into the traditional ant colony algorithm. In experiment 1, improved heuristic information and an enhanced pheromone volatilization factor are incorporated to test for faster convergence and a broader search scope. In experiment 2, pheromone expansion rules and a diffusion mechanism are added to evaluate the pheromone’s ability to guide and identify the optimal path. Finally, the collision prevention mechanism and B-spline curve optimization are applied to identify an optimal path that satisfies the robot’s kinematic constraints. Each algorithm was executed 20 times.
Simulation experiments of the traditional ACO algorithm (
Figure 11) show that the paths appear to be collapsed.
Figure 12,
Figure 13 and
Figure 14 and
Table 2 show that the generated paths neither cross nor fold. Experiment 1 demonstrates that introducing Equations (6)–(8) effectively guides ants to the target and avoids local optima. Experiment 2 indicates that the elite ant strategy in Equations (12) and (13) guides ants in finding better paths. Additionally, the pheromone diffusion mechanism enhances the elite ants’ guidance. The new pheromone update strategy minimizes redundant searches and enhances the algorithm’s global search capability in complex environments.
Figure 14 shows that the smoothed path in experiment 2 improves smoothness while retaining short path advantages, meeting robot kinematic requirements. By incorporating path smoothing and safety distances, Improved-ACO effectively avoids obstacles and ensures robot path feasibility and safety.
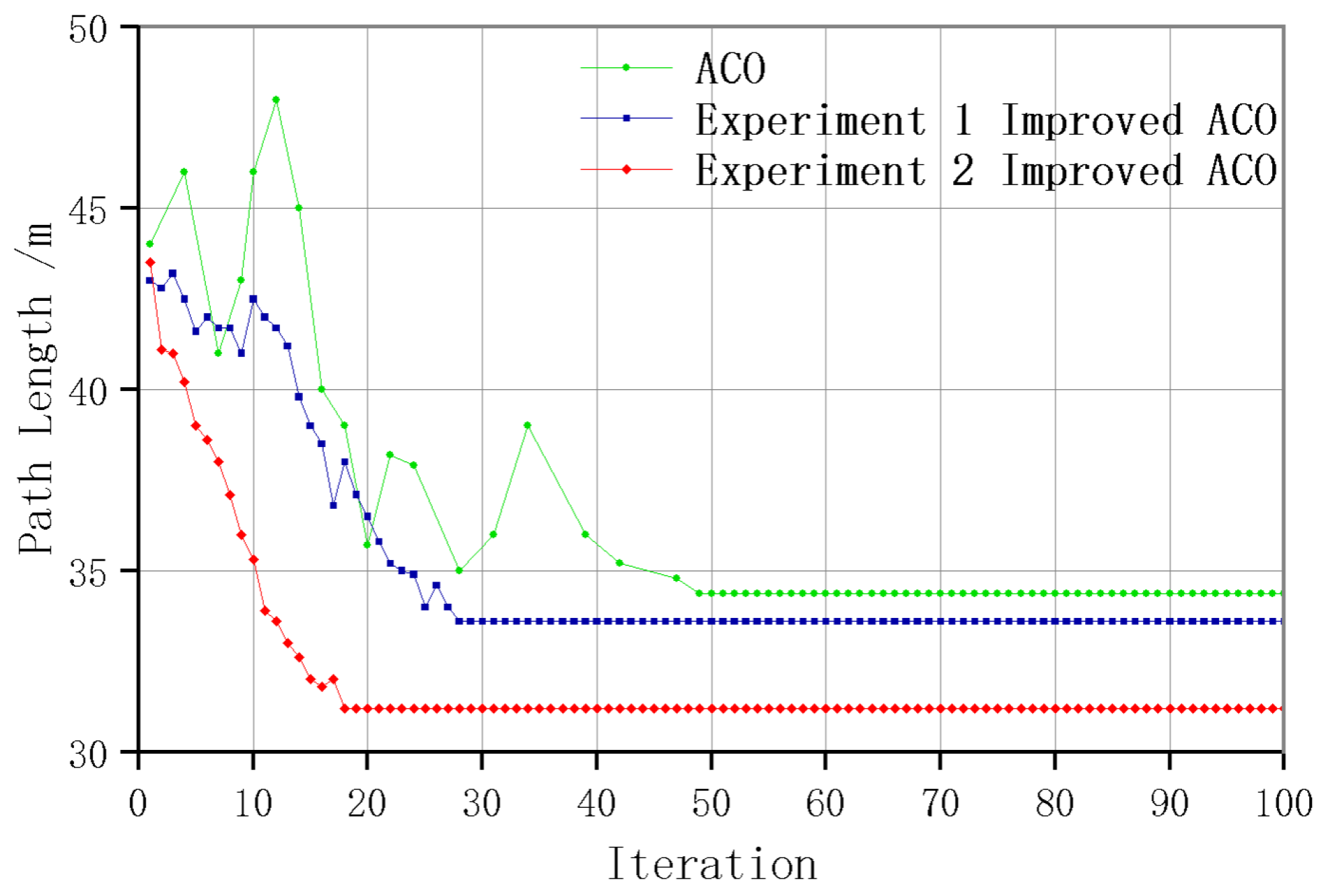
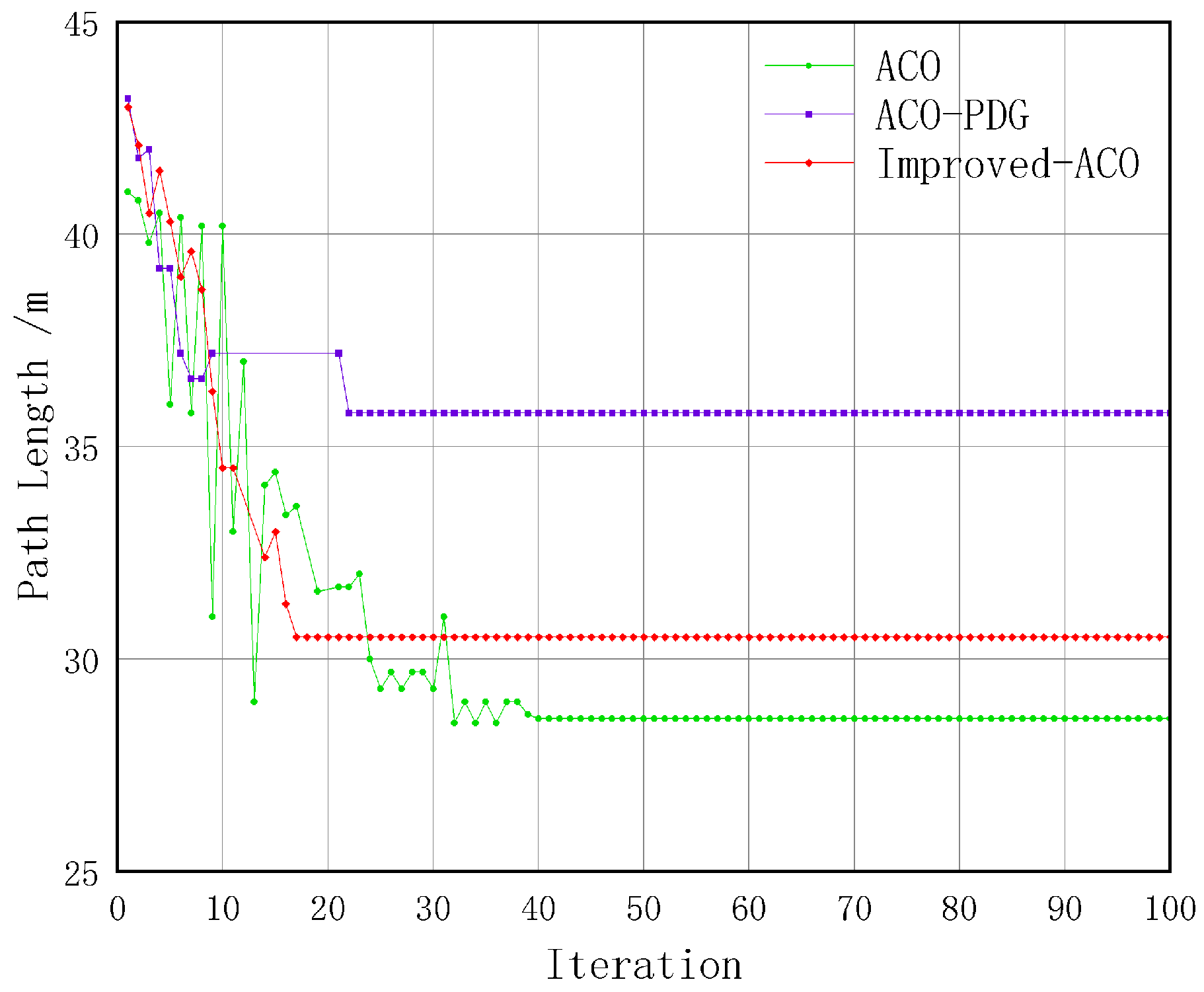
Figure 15 illustrates the convergence outcomes of the methods.
Table 2 indicates that experiment 1 achieves a path
shorter than the traditional ACO algorithm. Experiment 2 reduces path length by
compared to experiment 1, while smoothing increases the path length by
but significantly enhances overall smoothness. Experiment 1 reduces iterations by approximately
compared to the traditional ACO algorithm, while experiment 2 reduces iterations by
compared to experiment 1. Experiment 1 reduces turns by
compared to the traditional ACO algorithm, while experiment 2 achieves a
reduction compared to experiment 1. Improved-ACO significantly improves path length, convergence rate, and smoothness in path planning.
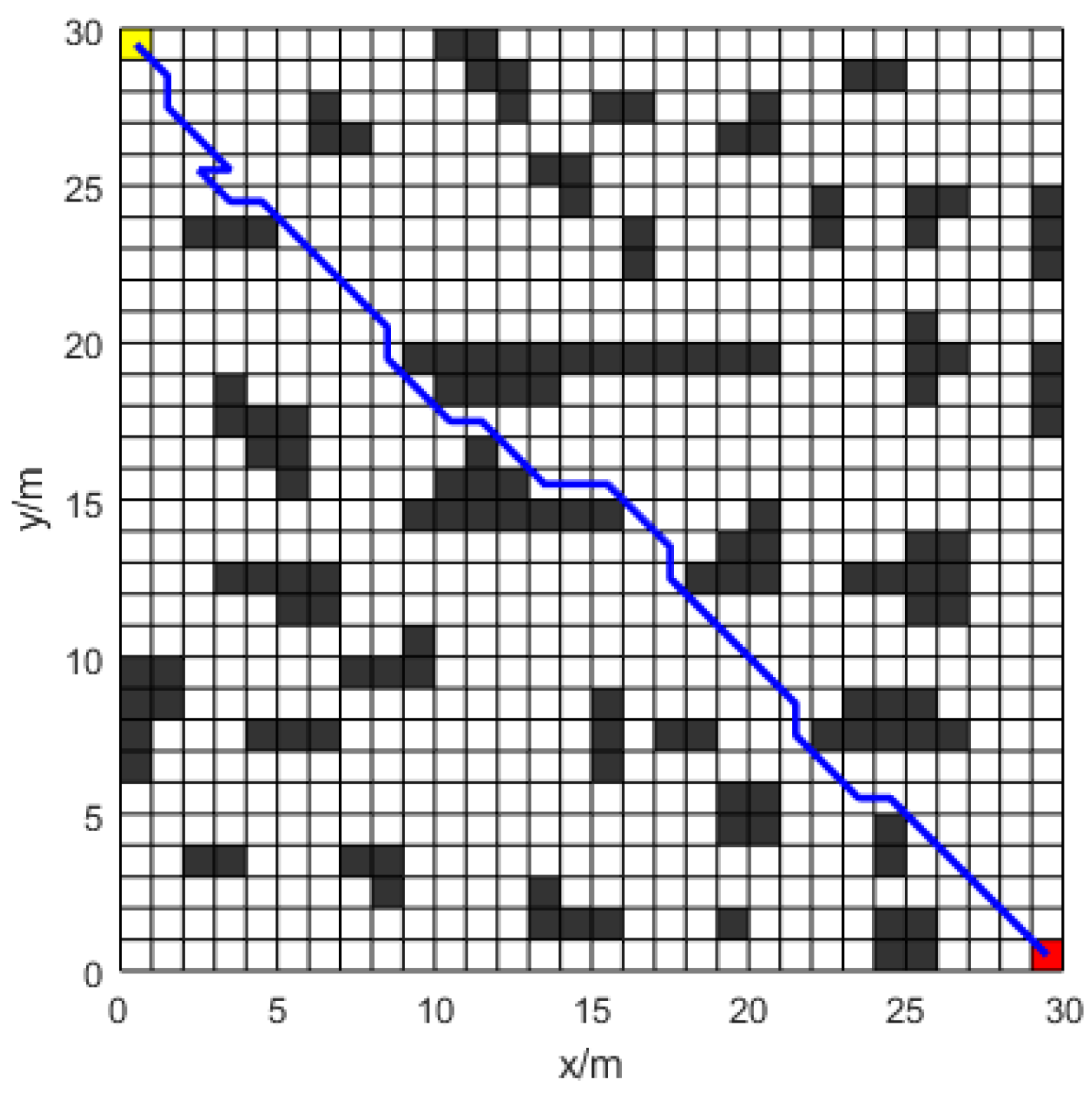
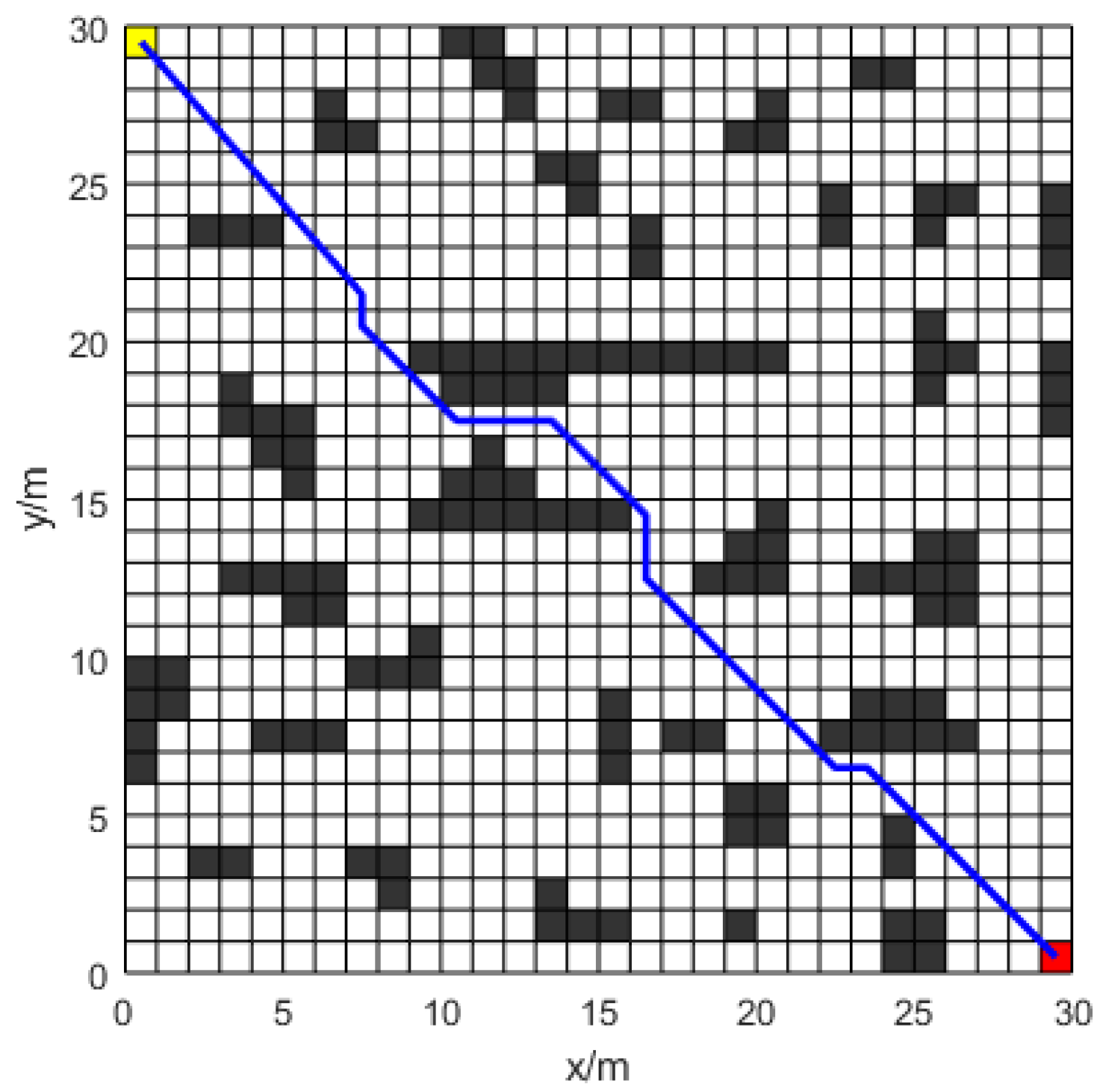
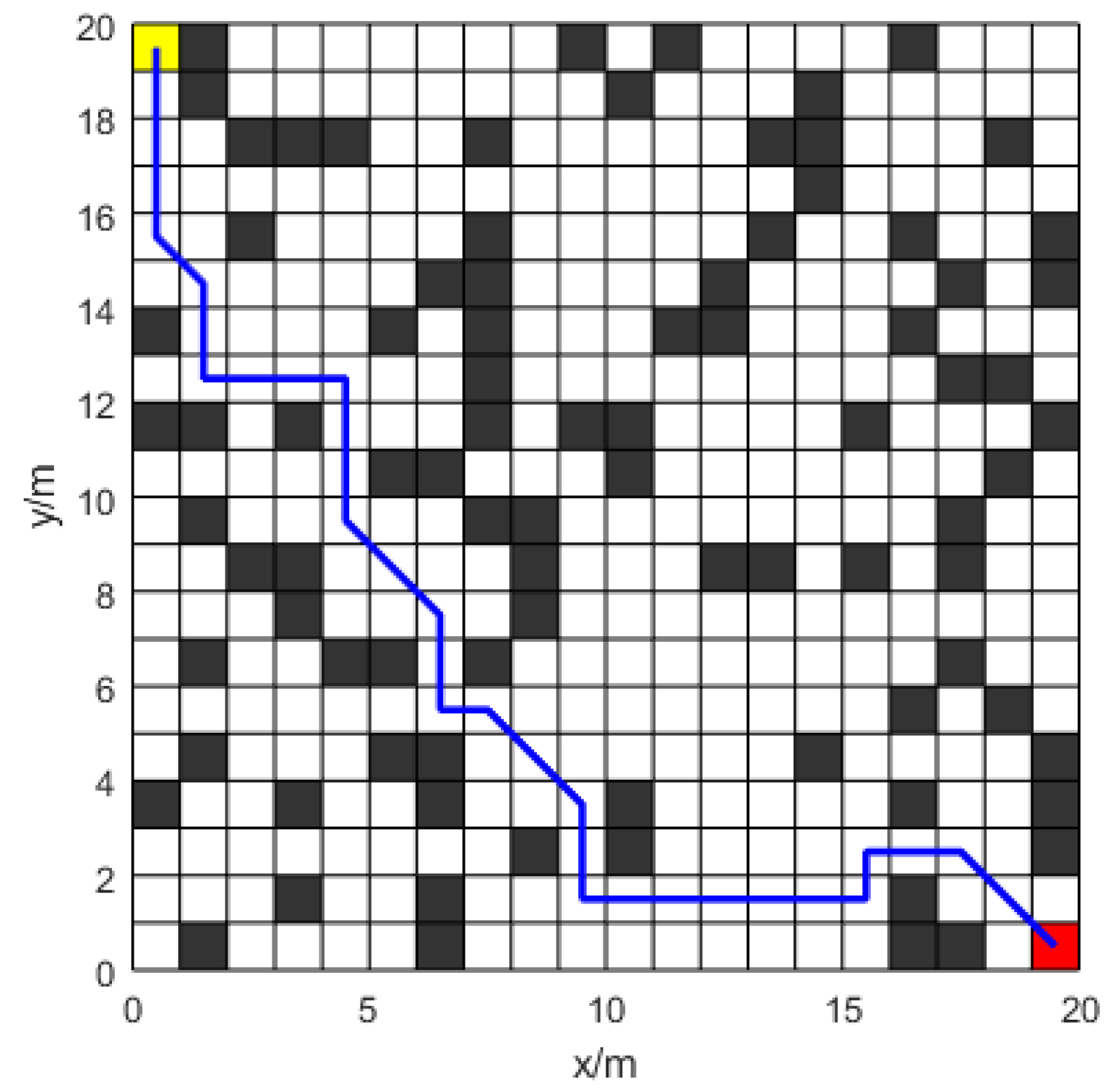
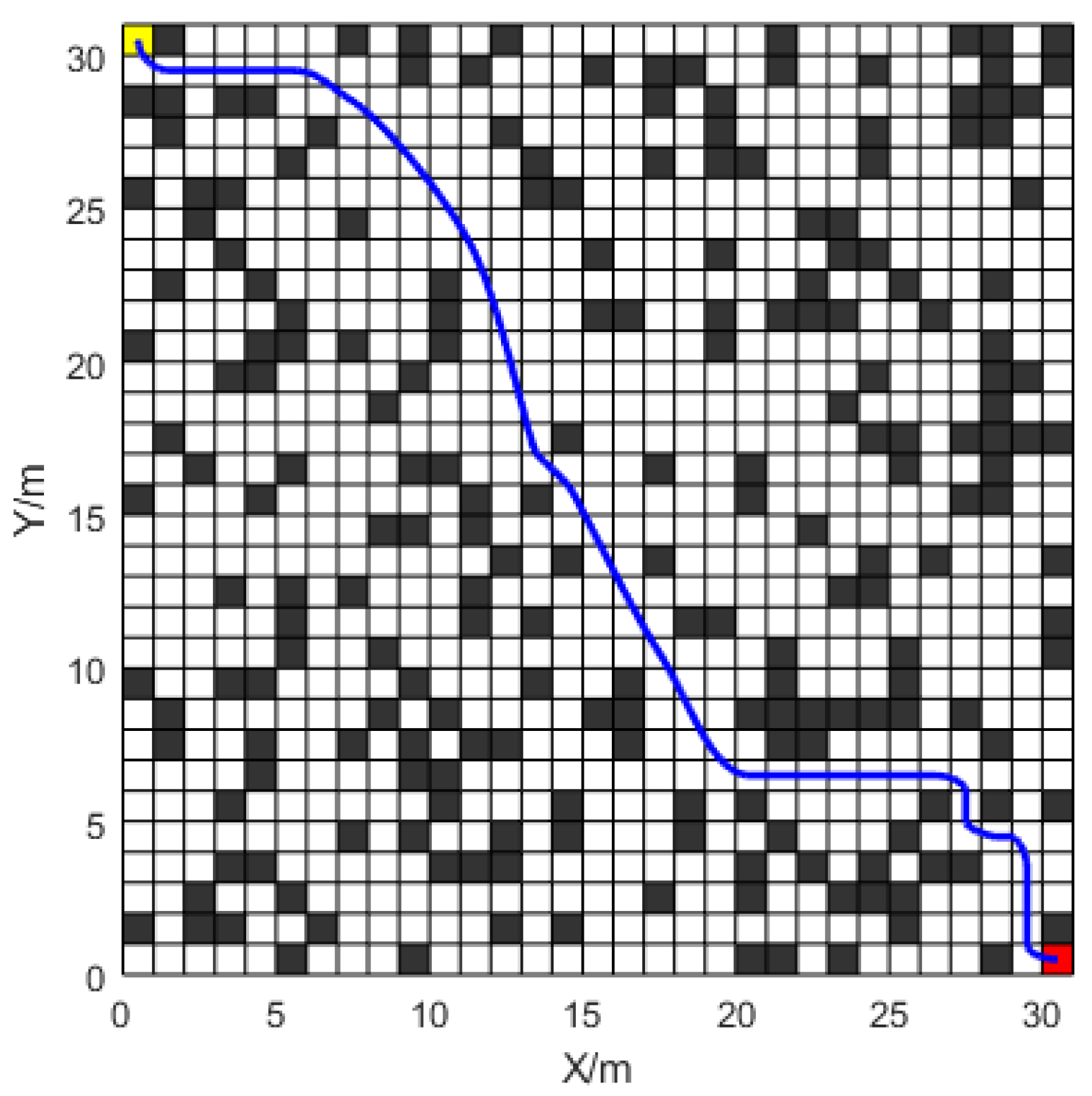
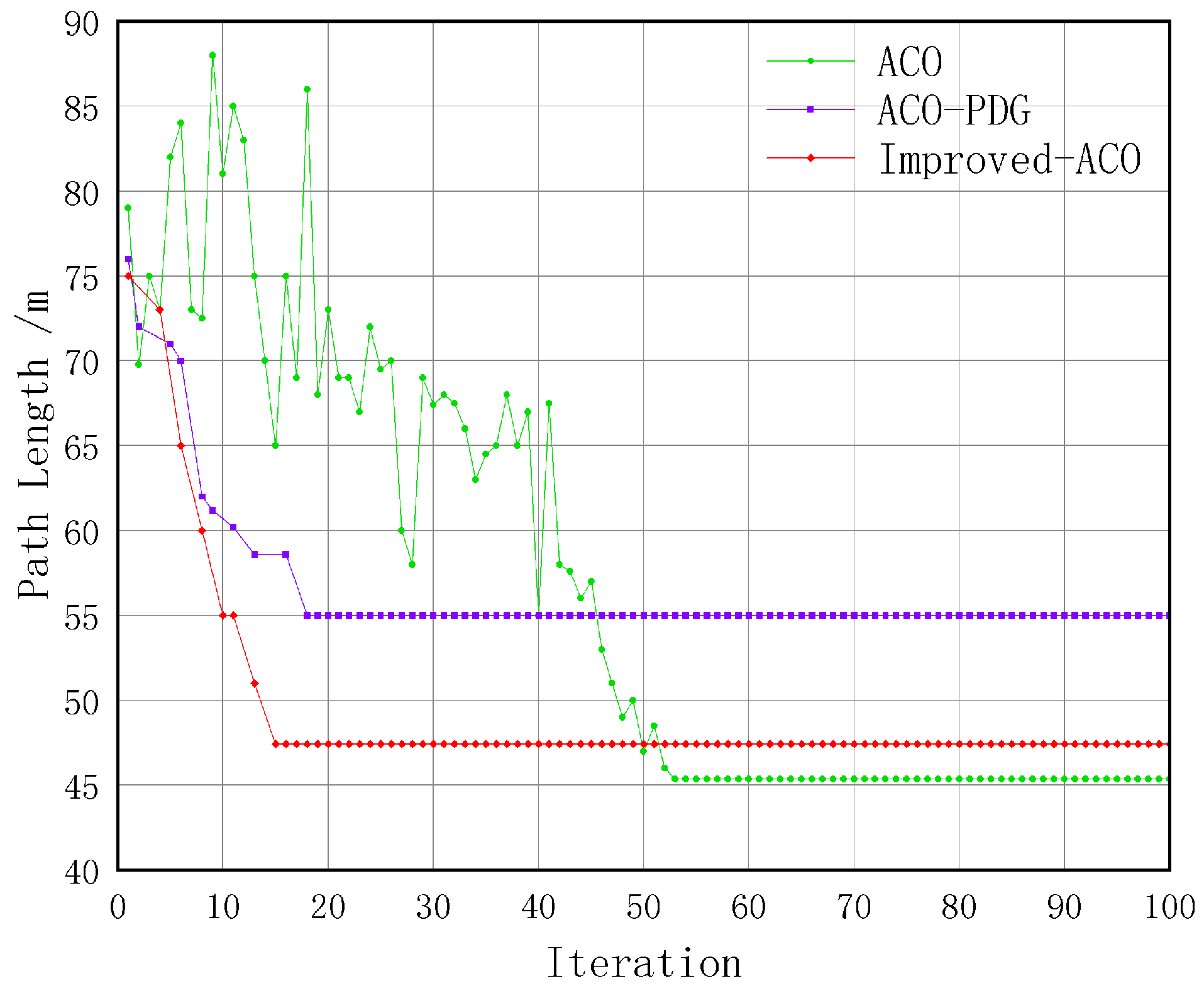
6.3. Simulation Experiment 3
In simulation experiment 3, a
grid map (map 2) is used. For ACO, ACO-PDG [
39], and Improved-ACO, the initialization parameters are adjusted based on those proposed in this paper.
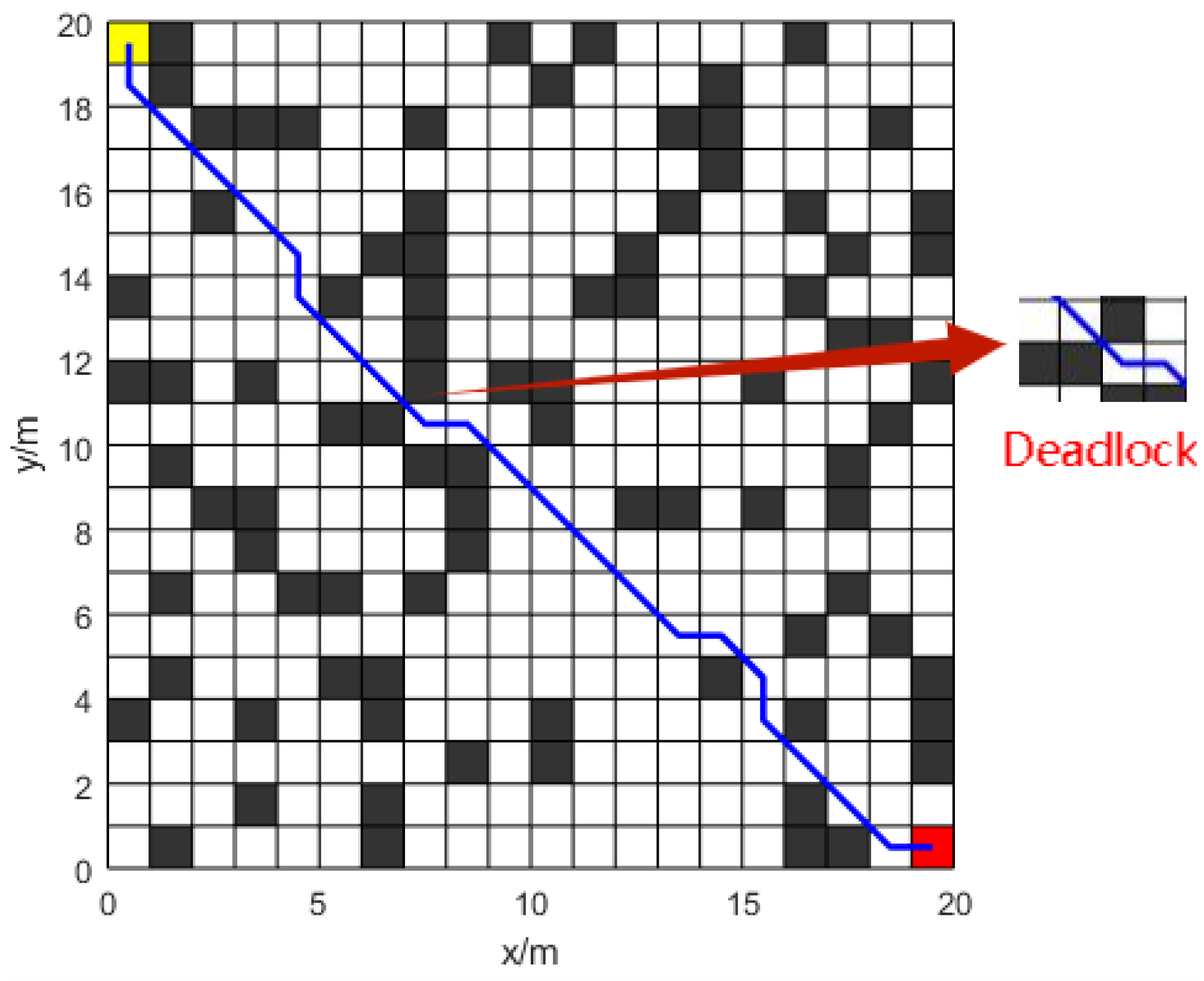
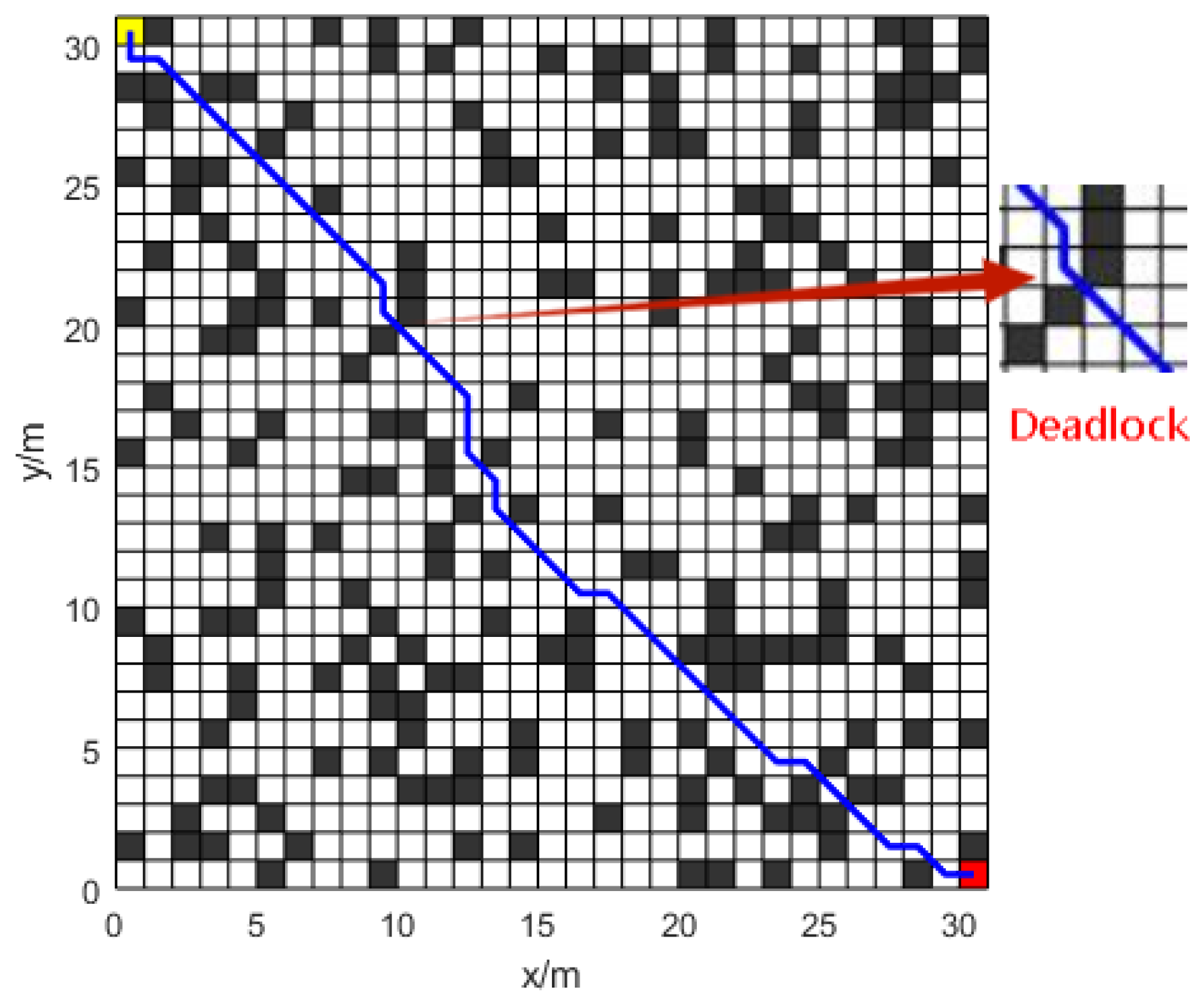
As shown in
Figure 16,
Figure 17 and
Figure 18 and
Table 2, the traditional ACO algorithm exhibits a deadlock phenomenon in simulation experiment 3. The ACO-PDG algorithm employs a non-uniform initial pheromone strategy to prevent ants from entering deadlock paths. This paper presents an enhanced ACO algorithm that integrates an anti-collision technique to prevent ants from traversing stalemate pathways. Regarding path length, the traditional ACO algorithm produces a path length of
due to deadlock encounters. The Improved-ACO algorithm achieves a path length of
, approximately
shorter than that of the ACO-PDG algorithm. The Improved-ACO algorithm, as shown in
Figure 19, is able to lower the number of iterations by about
when compared to the ACO-PDG framework. Regarding turning frequency, the Improved-ACO algorithm reduces turning instances by approximately
compared to the ACO-PDG algorithm.
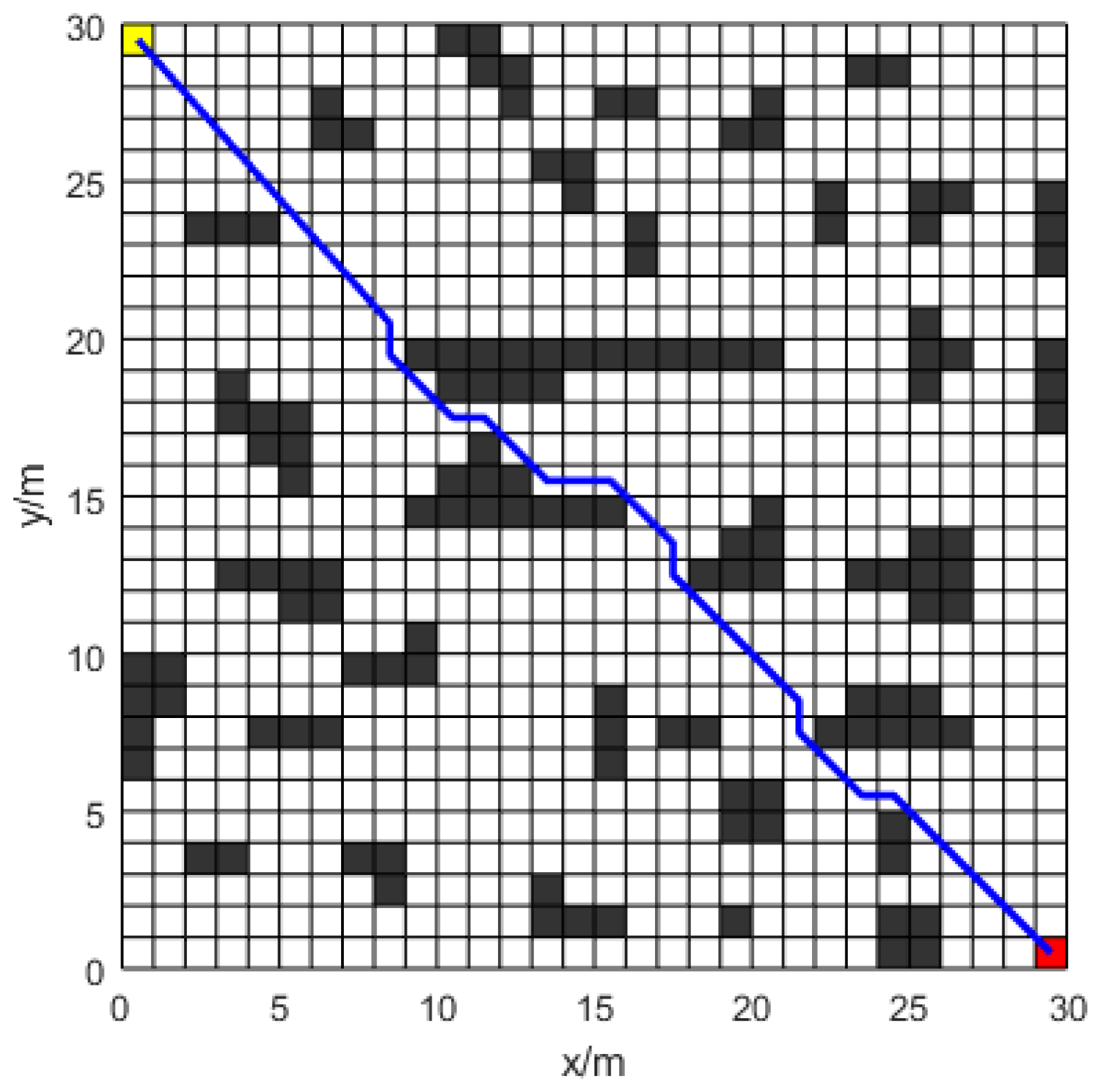
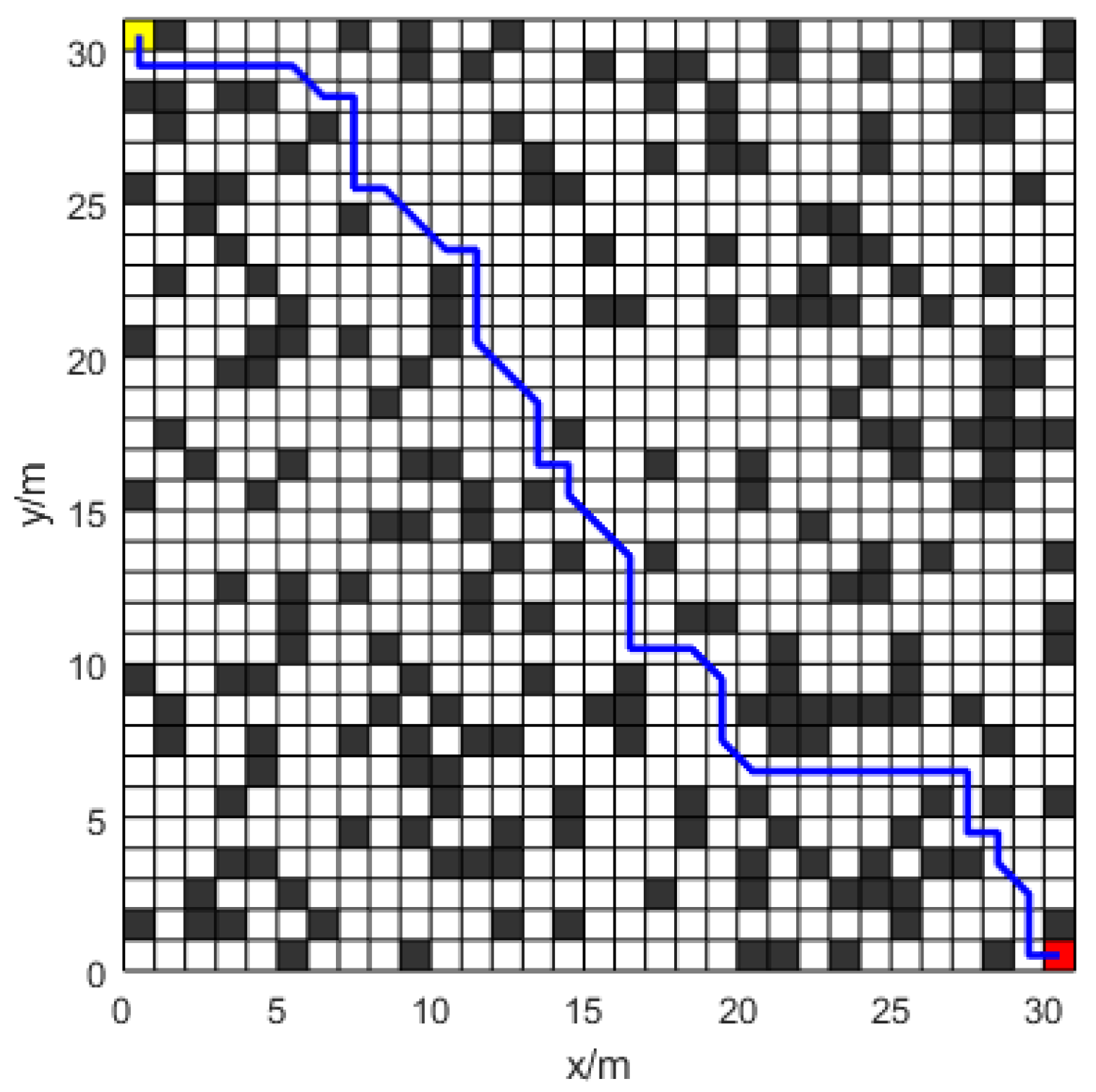
6.4. Simulation Experiment 4
To achieve greater differentiation from the grid map in simulation experiment 1 and to account for the map’s complexity, a grid map, labeled map 3, was configured. A comparison is established between the performance of ACO, ACO-PDG, and the Improved-ACO algorithm.
When compared to the ACO-PDG technique, the significantly Improved-ACO algorithm reduces the path length by roughly
, as shown in
Figure 20,
Figure 21 and
Figure 22 and
Table 2. The Improved-ACO algorithm decreases the number of turns by
relative to ACO-PDG in terms of turning frequency. Comparing the Improved-ACO algorithm to ACO-PDG,
Figure 23 indicates that the former decreases the number of iterations by almost
.
The results indicate that Improved-ACO significantly enhances both the efficiency and performance of the path planning process. Compared to traditional algorithms, Improved-ACO reduces the average number of turns by and enhances convergence speed by . Additionally, the path smoothing mechanism, which incorporates B-spline curves, ensures that the generated paths are both smooth and feasible for practical robot navigation. The experiments confirm that the Improved-ACO algorithm performs effectively across various map sizes and in complex environments, establishing it as a robust and adaptable solution for robotic navigation tasks.
7. Conclusions
This study first outlines the path planning ideas derived from the traditional ant colony optimization (ACO) technique. Next, the paper elucidates the Improved-ACO algorithm, which mitigates challenges such as sluggish convergence, early stagnation, and the tendency to get stuck in local optima, which are characteristic of the traditional ACO algorithm. The improved heuristic information and pheromone volatilization factor help ants converge more effectively towards the target point. Dynamic pheromone volatilization improves the utilization ratio of pheromones before and after the ant search. The pheromone updating strategy and diffusion mechanism enhance the attraction of the optimal path to ants, reduce redundant searches, and improve the algorithm’s global search capability in complex environments. Path smoothing, the anti-collision mechanism, and B-spline curves are then applied to prevent ants from walking into dead-end paths, ensure curvature continuity, and satisfy the robot’s kinematic limitations, improving the path’s smoothness. Finally, a simulation experiment is conducted using MATLAB. The simulation results show a reduction in the average number of turns compared to other traditional algorithms. Additionally, it confirms that this method offers higher resource utilization, reduces redundant computations, and significantly improves path planning efficiency. In the gradient comparison experiment, continuous improvements to the traditional ACO algorithm demonstrate significant enhancements in path length, convergence speed, and smoothness, with a reduction in the average number of iterations. Compared to other algorithms, this method demonstrates higher adaptability in path planning, especially in complex situations, effectively balancing path length, smoothness, and convergence speed. By reducing the number of turns and iterations, this method enhances the practicality of path planning, offering a superior path selection solution for mobile robots in real-world applications. However, this method also has some limitations. Improved-ACO performs better than certain other algorithms in terms of path length; still, in some situations, it is somewhat longer than traditional ACO. If the path length requirement is stringent, further optimization of the algorithm’s heuristic information calculation may be needed in specific environments. Although Improved-ACO offers advantages in turning frequency and convergence speed, it is slightly inferior to the Dijkstra and A* algorithms in path length. In this study, some parameters (such as heuristic information weight and pheromone volatilization factor) can still be further optimized through experimentation to achieve the method’s optimal state. Future work could explore dynamic environments, such as obstacle movement or target position changes, though real-time performance and algorithm adaptability still require further investigation. Future research may consider integrating automated parameter optimization techniques, such as genetic algorithms or deep reinforcement learning, to further enhance algorithm performance.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}