
Ant Colony Optimization for Accelerated Pathway Identification in Connection Element Method Reservoir Models: A Fast-Track Solution for Large-Scale Simulations

 ,
,
Abstract
1. Introduction
2. Indicators Between Injection and Production Wells and Basic Principles of Ant Colony Optimization
2.1. Injection–Production Splitting Coefficient
2.2. Ant Colony Optimization Principle
2.3. Advantageous Path Tracking Based on Ant Colony Optimization
| Algorithm 1: Ant Colony Optimization for Tracking Advantageous Paths |
| Input: Connection information and splitting coefficients between well points Output: Advantageous path from the injection well to the target production well
|
3. Analysis of Advantageous Path Examples
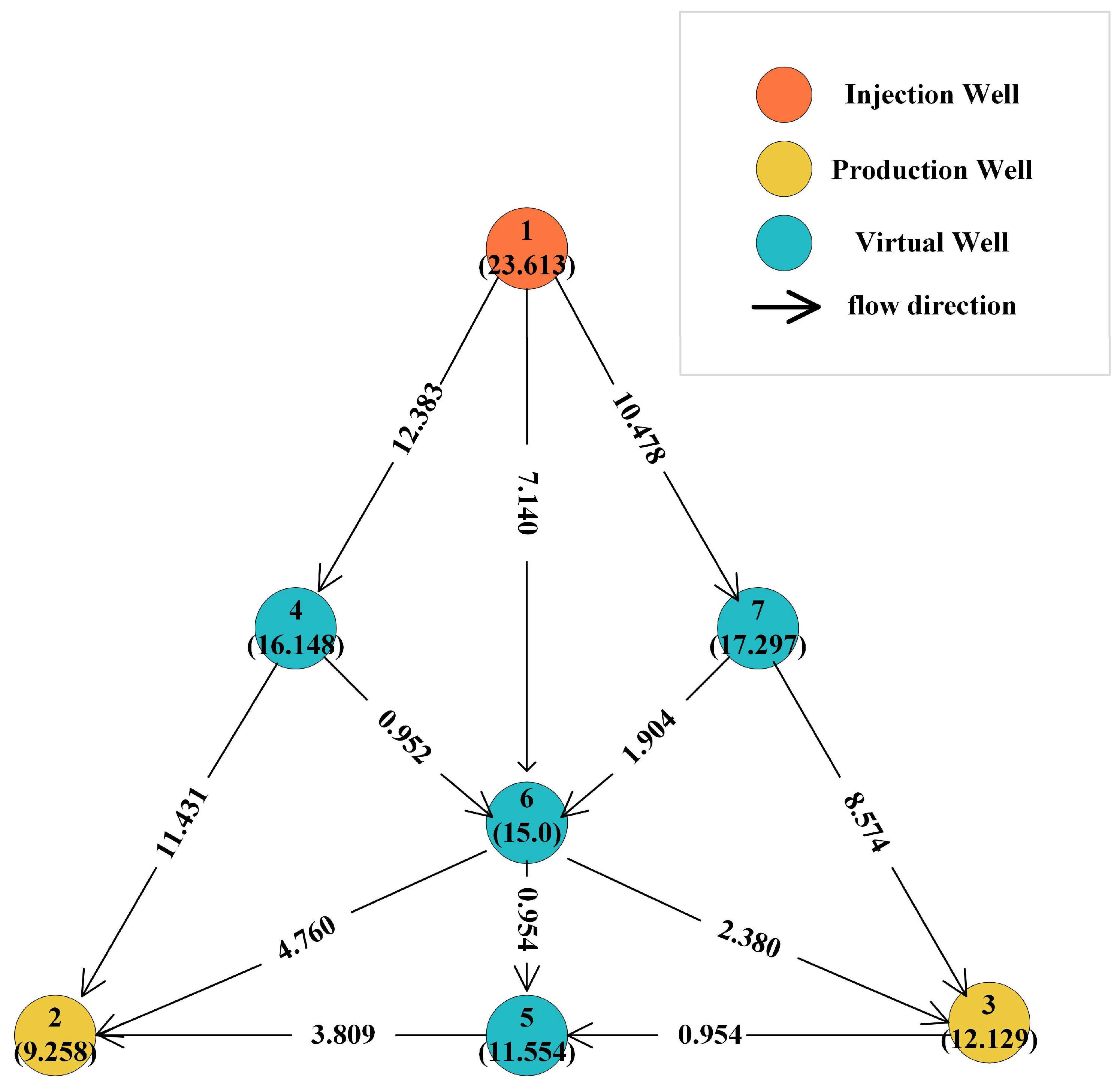
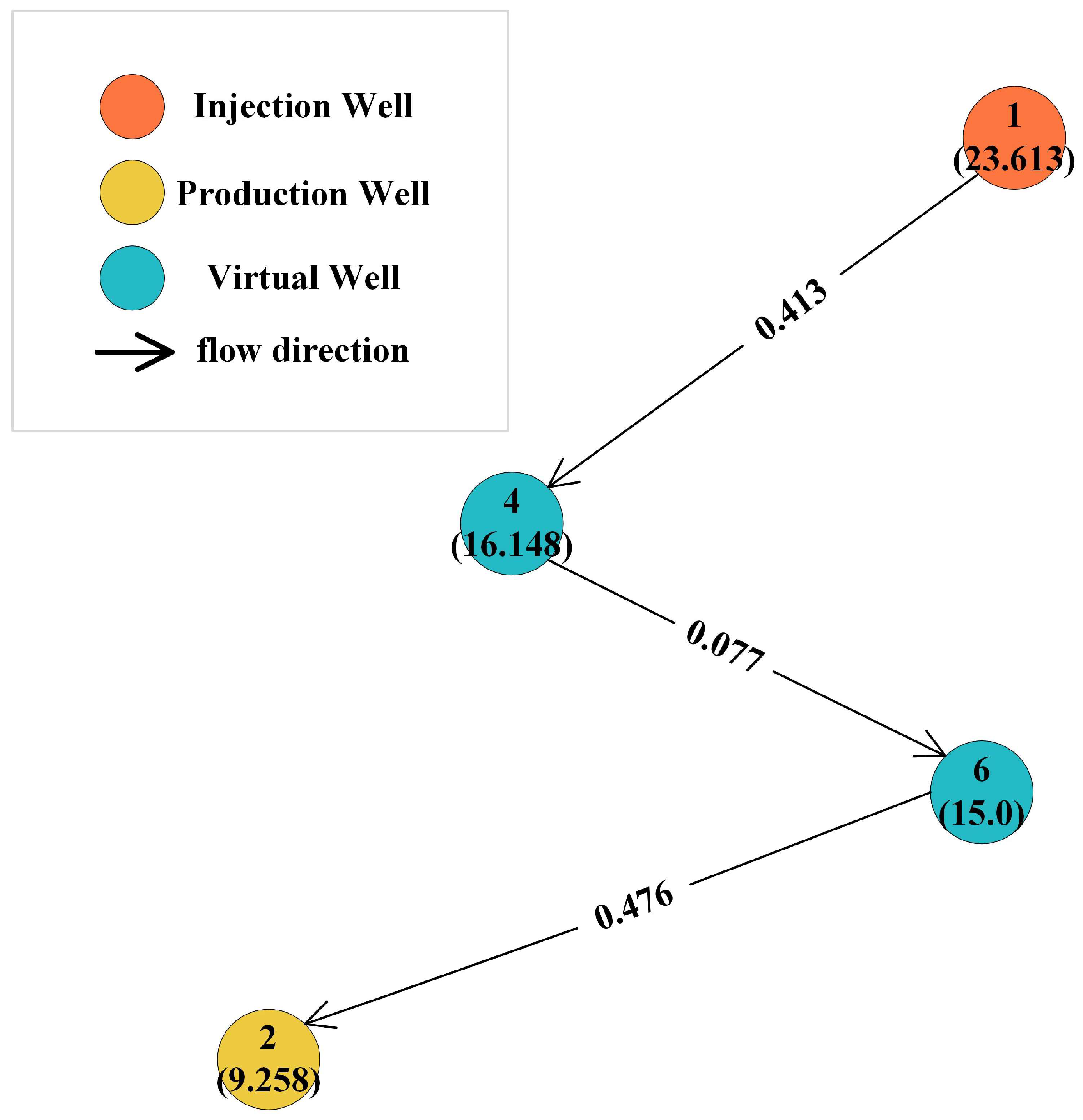
3.1. Example Model 1 of Actual Connected Well Points
3.2. Example Model 2 of Actual Connected Well Points
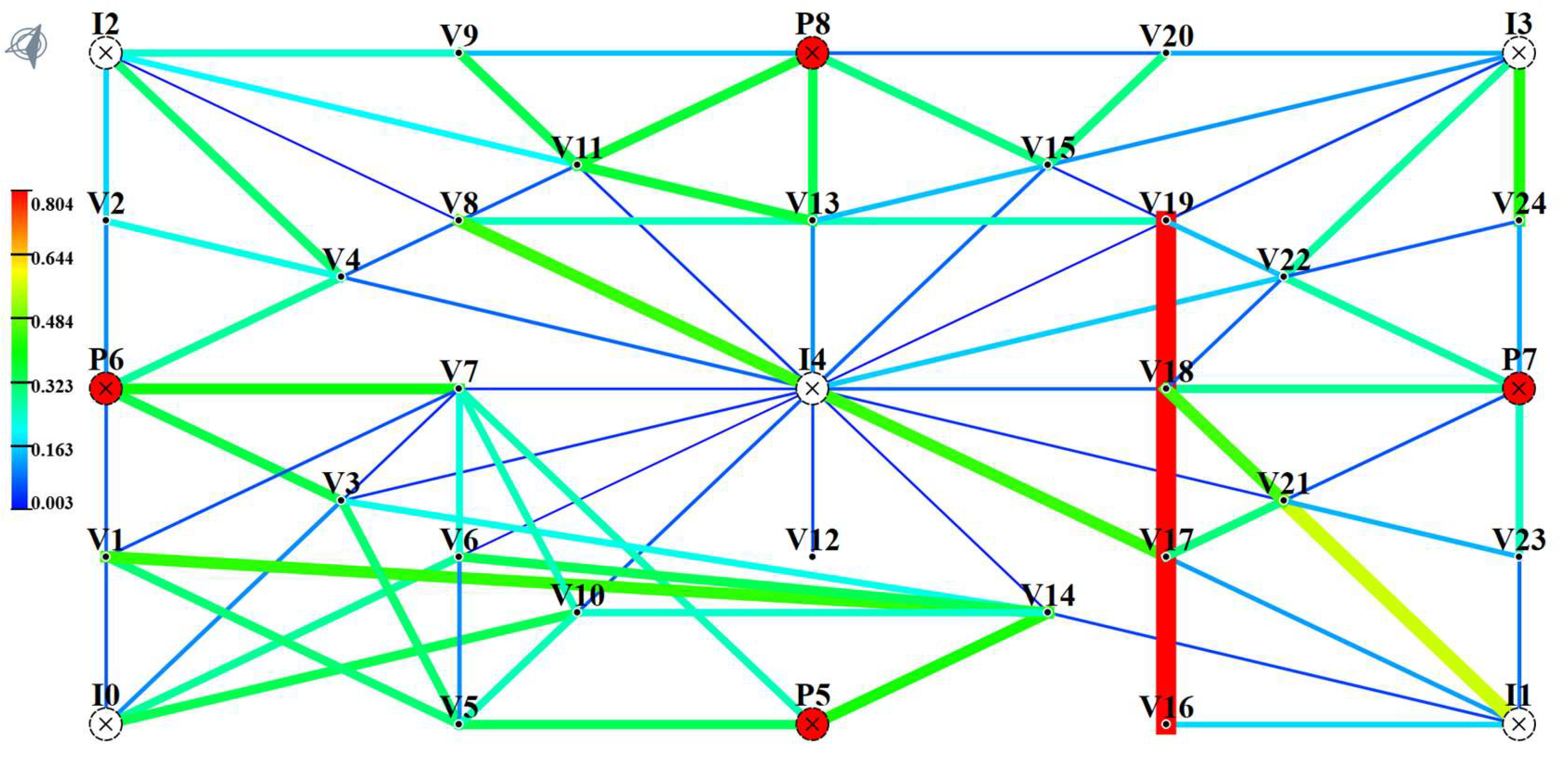
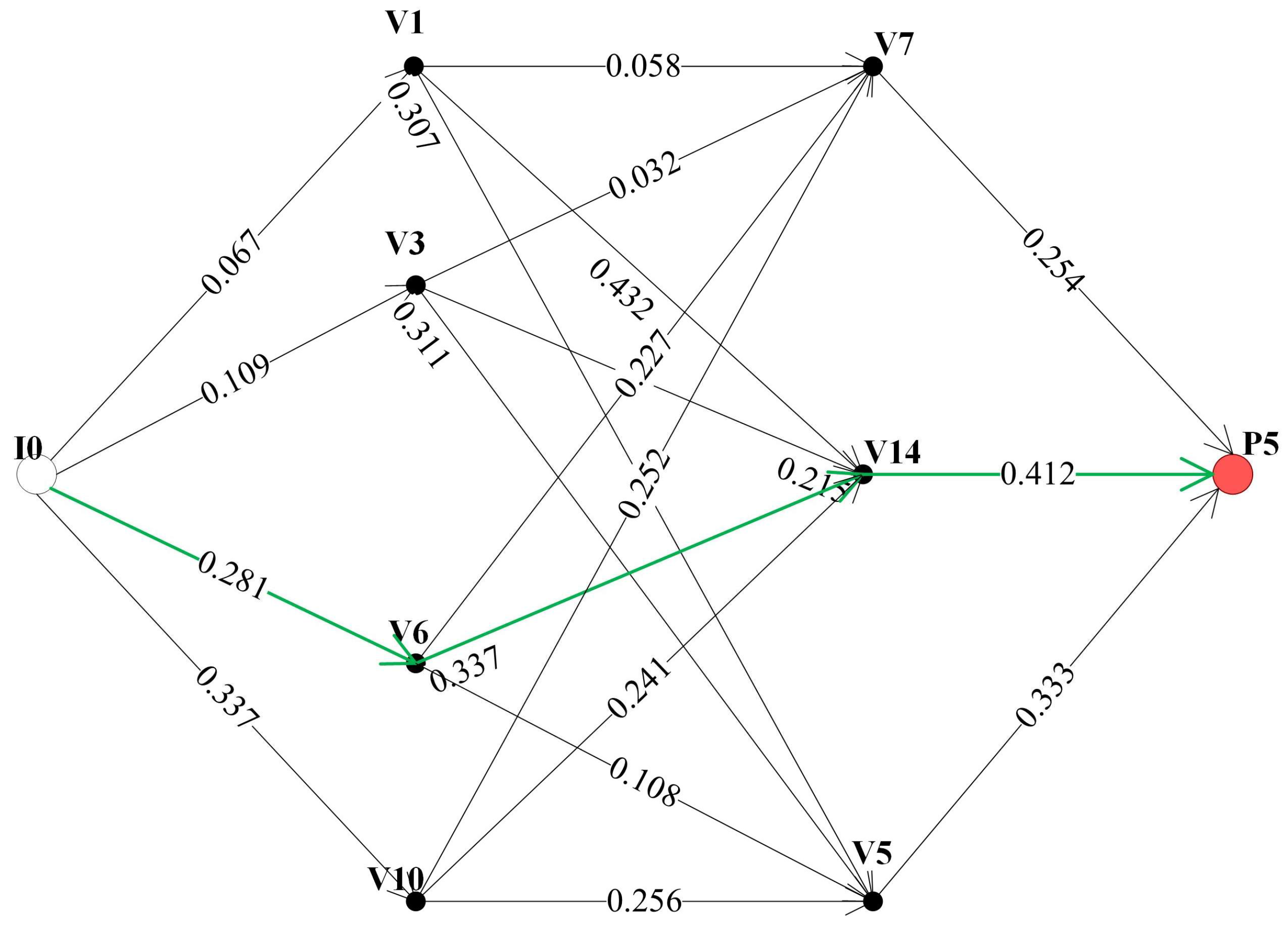
3.3. Connectivity Well Point Example Model Group
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Rao, X.; Zhao, H.; Zhan, W.; Xu, Y.; Liu, Y. Generalized finite difference method based meshless analysis for coupled two-phase porous flow and geomechanics. Eng. Anal. Bound. Elem. 2023, 146, 184–203. [Google Scholar] [CrossRef]
- Gilman, J.R. An efficient finite-difference method for simulating phase segregation in the matrix blocks in double-porosity reservoirs. SPE Reserv. Eng. 1986, 1, 403–413. [Google Scholar] [CrossRef]
- Zhou, Y.; Xu, Y.; Rao, X.; Hu, Y.; Liu, D.; Zhao, H. Artificial neural network-(ANN-) based proxy model for fast performances’ forecast and inverse schedule design of steam-flooding reservoirs. Math. Probl. Eng. 2021, 2021, 5527259. [Google Scholar] [CrossRef]
- Karimi-Fard, M.; Firoozabadi, A. Numerical simulation of water injection in 2D fractured media using discrete-fracture model. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 30 September–3 October 2001; Paper SPE-71615. SPE: Richardson, TX, USA. [Google Scholar]
- Rao, X.; Xin, L.; He, Y.; Fang, X.; Gong, R.; Wang, F.; Dai, W. Numerical simulation of two-phase heat and mass transfer in fractured reservoirs based on projection-based embedded discrete fracture model (pEDFM). J. Pet. Sci. Eng. 2022, 208, 109323. [Google Scholar] [CrossRef]
- Felippa, C.A. Introduction to Finite Element Methods; University of Colorado: Denver, CO, USA, 2004; p. 885. [Google Scholar]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Chen, Z.; He, Z.; Zhang, Q. Community detection based on local topological information and its application in power grid. Neurocomputing 2015, 170, 384–392. [Google Scholar] [CrossRef]
- Garver, L.L. Transmission network estimation using linear programming. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 1688–1697. [Google Scholar] [CrossRef]
- Jacquemyn, C.; Jackson, M.D.; Hampson, G.J. Surface-based geological reservoir modelling using grid-free NURBS curves and surfaces. Math. Geosci. 2019, 51, 1–28. [Google Scholar] [CrossRef]
- Chen, X.; Rao, X.; Xu, Y.; Liu, Y. An effective numerical simulation method for steam injection assisted in situ recovery of oil shale. Energies 2022, 15, 776. [Google Scholar] [CrossRef]
- Zhao, H.; Zhan, W.; Chen, Z.; Rao, X. A novel connection element method for multiscale numerical simulation of two-phase flow in fractured reservoirs. SPE J. 2024, 29, 4950–4973. [Google Scholar] [CrossRef]
- Coon, E.T.; Moulton, J.D.; Kikinzon, E.; Berndt, M.; Manzini, G.; Garimella, R.; Painter, S.L. Coupling surface flow and subsurface flow in complex soil structures using mimetic finite differences. Adv. Water Resour. 2020, 144, 103701. [Google Scholar] [CrossRef]
- Zhou, C. A parallel adaptive finite element algorithm for numerical simulation of flows. Chin. J. Comput. Phys. 2006, 23, 412. [Google Scholar]
- Zhao, H.; Xu, L.; Guo, Z.; Zhang, Q.; Liu, W.; Kang, X. Flow-path tracking strategy in a data-driven interwell numerical simulation model for waterflooding history matching and performance prediction with infill wells. SPE J. 2020, 25, 1007–1025. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, Y.; Liang, X.; Zhang, J.; Xu, Y.; Liu, J. Liquid production splitting of multi-layer mining considering multiple factors. Pet. Reserv. Eval. Dev. 2022, 12, 945–950. [Google Scholar]
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Zhao, H.; Rao, X.; Liu, D.; Xu, Y.; Zhan, W.; Peng, X. A flownet-based method for history matching and production prediction of shale or tight reservoirs with fracturing treatment. SPE J. 2022, 27, 2793–2819. [Google Scholar] [CrossRef]
- Kasahara, T.; Wondzell, S.M. Geomorphic controls on hyporheic exchange flow in mountain streams. Water Resour. Res. 2003, 39, SBH 3-1–SBH 3-14. [Google Scholar] [CrossRef]
- Goldberg, A.V.; Harrelson, C. Computing the shortest path: A search meets graph theory. In Proceedings of the ACM-SIAM Symposium on Discrete Algorithms (SODA), Vancouver, BC, Canada, 23–25 January 2005; Volume 5, pp. 156–165. [Google Scholar]
- Tarjan, R. Depth-first search and linear graph algorithms. SIAM J. Comput. 1972, 1, 146–160. [Google Scholar] [CrossRef]
- Beamer, S.; Asanović, K.; Patterson, D. Direction-optimizing breadth-first search. Sci. Program. 2013, 21, 137–148. [Google Scholar] [CrossRef]
- Pathak, M.J.; Patel, R.L.; Rami, S.P. Comparative analysis of search algorithms. Int. J. Comput. Appl. 2018, 179, 40–43. [Google Scholar]
- Shi, L. Research on path planning method based on graph search algorithm. Highlights Sci. Eng. Technol. 2024, 97, 267–274. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Li, C.; Yang, S. A survey of swarm intelligence for dynamic optimization: Algorithms and applications. Swarm Evol. Comput. 2017, 33, 1–17. [Google Scholar] [CrossRef]
- Prity, F.S.; Uddin, K.A.; Nath, N. Exploring swarm intelligence optimization techniques for task scheduling in cloud computing: Algorithms, performance analysis, and future prospects. Iran J. Comput. Sci. 2024, 7, 337–358. [Google Scholar] [CrossRef]
- Ouyang, J.; Yan, G.R. A multi-group ant colony system algorithm for TSP. In Proceedings of the 2004 International Conference on Machine Learning and Cybernetics (IEEE Cat. No. 04EX826), Shanghai, China, 26–29 August 2004; Volume 1, pp. 117–121. [Google Scholar]
- Che, G.; Liu, L.; Yu, Z. An improved ant colony optimization algorithm based on particle swarm optimization algorithm for path planning of autonomous underwater vehicle. J. Ambient. Intell. Hum. Comput. 2020, 11, 3349–3354. [Google Scholar] [CrossRef]
- Fleischer, R.; Trippen, G. Experimental studies of graph traversal algorithms. In Proceedings of the International Workshop on Experimental and Efficient Algorithms, Ascona, Switzerland, 26–28 May 2003; Springer: Berlin/Heidelberg, Germany; pp. 120–133. [Google Scholar]
- Chen, X.; Yu, L.; Wang, T.; Liu, A.; Wu, X.; Zhang, B.; Sun, Z. Artificial intelligence-empowered path selection: A survey of ant colony optimization for static and mobile sensor networks. IEEE Access 2020, 8, 71497–71511. [Google Scholar] [CrossRef]
- Mohan, B.C.; Baskaran, R. A survey: Ant colony optimization based recent research and implementation on several engineering domains. Expert Syst. Appl. 2012, 39, 4618–4627. [Google Scholar] [CrossRef]
- Chen, Y.; Bai, G.; Zhan, Y.; Hu, X.; Liu, J. Path planning and obstacle avoiding of the USV based on improved ACO-APF hybrid algorithm with adaptive early-warning. IEEE Access 2021, 9, 40728–40742. [Google Scholar] [CrossRef]
- Wu, J.; Chen, B.; Zhang, K.; Zhou, J.; Miao, L. Ant pheromone route guidance strategy in intelligent transportation systems. Phys. A 2018, 503, 591–603. [Google Scholar] [CrossRef]
- Gang-Li, Q.; Jia-Ben, Y. An improved ant colony algorithm based on adaptively adjusting pheromone. Inf. Control 2002, 31, 198–201. [Google Scholar]
- Gutjahr, W.J.; Rauner, M.S. An ACO algorithm for a dynamic regional nurse-scheduling problem in Austria. Comput. Oper. Res. 2007, 34, 642–666. [Google Scholar] [CrossRef]
- Luan, J.; Yao, Z.; Zhao, F.; Song, X. A novel method to solve supplier selection problem: Hybrid algorithm of genetic algorithm and ant colony optimization. Math. Comput. Simul. 2019, 156, 294–309. [Google Scholar] [CrossRef]
- Zhan, W.; Zhao, H.; Rao, X.; Liu, Y. Generalized finite difference method-based numerical modeling of oil–water two-phase flow in anisotropic porous media. Phys. Fluids 2023, 35, 103317. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Nodes | Number of Edges | Execution Time | Flow Path Data |
|---|---|---|---|
| 22 | 84 | DFS:0.0059s ACO:0.3776s | [0, 3, 8, 12, 16, 5] Split Factor:0.885198 |
| 32 | 169 | DFS:0.2801s ACO:0.5052s | [0, 1, 11, 17, 24, 30, 5] Split Factor:0.533548 |
| 42 | 319 | DFS:1.0464s ACO:0.6260s | [0, 9, 15, 22, 32, 5] Split Factor:0.857916 |
| 52 | 469 | DFS:14.5559s ACO:1.9847s | [0, 4, 21, 27, 38, 50, 5] Split Factor:0.814488 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Liang, Y.; Liu, B.; Yu, H.; Tian, F.; Xia, J.; Zhang, X. Ant Colony Optimization for Accelerated Pathway Identification in Connection Element Method Reservoir Models: A Fast-Track Solution for Large-Scale Simulations. Processes 2025, 13, 404. https://doi.org/10.3390/pr13020404
Zheng Y, Liang Y, Liu B, Yu H, Tian F, Xia J, Zhang X. Ant Colony Optimization for Accelerated Pathway Identification in Connection Element Method Reservoir Models: A Fast-Track Solution for Large-Scale Simulations. Processes. 2025; 13(2):404. https://doi.org/10.3390/pr13020404
Chicago/Turabian StyleZheng, Yuanhao, Yongcan Liang, Botao Liu, Huaping Yu, Fei Tian, Jinjun Xia, and Xi Zhang. 2025. "Ant Colony Optimization for Accelerated Pathway Identification in Connection Element Method Reservoir Models: A Fast-Track Solution for Large-Scale Simulations" Processes 13, no. 2: 404. https://doi.org/10.3390/pr13020404
APA StyleZheng, Y., Liang, Y., Liu, B., Yu, H., Tian, F., Xia, J., & Zhang, X. (2025). Ant Colony Optimization for Accelerated Pathway Identification in Connection Element Method Reservoir Models: A Fast-Track Solution for Large-Scale Simulations. Processes, 13(2), 404. https://doi.org/10.3390/pr13020404