Abstract
Given the growing demand for sustainable energy solutions, this study addresses the challenge of improving the efficiency and environmental performance of residential water heating systems. This work presents the design and implementation of a controller aimed at regulating the outlet water temperature of a direct-expansion solar-assisted heat pump operating with propane. A dynamic model was experimentally identified using the AutoRegressive with eXogenous input methodology and used to design a Proportional–Integral–Derivative controller via the direct synthesis method. To regulate the outlet water temperature, the controller acts on the water flow rate. The effectiveness of the controller was evaluated through computer simulations and experimental tests. Its robustness was assessed by considering parametric variations of ±15%, during which the system maintained stability and performance. The controller demonstrated good accuracy and performance, keeping the desired temperature stable even in the presence of disturbances, both in simulations and experimental evaluations.
1. Introduction
The growing global demand for sustainable energy solutions has driven the development of technologies capable of increasing efficiency and reducing the environmental impact of thermal systems, particularly in residential and commercial applications. In this context, solar-assisted heat pumps (SAHPs) have emerged as a promising alternative for water heating [1,2,3,4]. Among them, direct expansion systems (DX-SAHPs) offer advantages such as structural simplicity, lower thermal losses, and higher coefficients of performance (COP) [5,6,7].
In parallel, the choice of refrigerant plays a crucial role in the efficiency and sustainability of heat pump systems. In recent years, propane (R290) has gained increasing attention as a natural refrigerant for heat pump applications. It combines favorable thermodynamic properties, such as high latent heat of vaporization and excellent heat transfer performance, with a very low global warming potential (GWP ≈ 3) and zero ozone depletion potential (ODP). Compared to synthetic refrigerants, R290 allows higher energy efficiency and can operate effectively in compact systems such as DX-SAHPs [5,6,7].
However, the performance of these systems depends strongly on the accurate regulation of the water outlet temperature at the condenser, especially under variable operating and climatic conditions. A distinctive feature of direct-expansion solar-assisted heat pumps is that the thermal input at the evaporator is directly dependent on solar irradiance, which inherently fluctuates with weather conditions. This variability significantly affects the system’s thermal balance and makes precise temperature control even more challenging. Manual control, although technically feasible, requires constant monitoring and frequent corrective actions, making it unsuitable for practical applications [8]. Therefore, the implementation of automatic control systems is essential to ensure thermal stability, energy efficiency, and user comfort.
The field of dynamic system control has contributed significantly to thermal engineering by enabling the manipulation of input variables to achieve optimal output behavior [9]. Several studies have focused on the development of control strategies for refrigeration and heating systems. Rasmussen and Larsen [10] developed a nonlinear adaptive method for superheat and capacity regulation in refrigeration systems. Choi [11] evaluated different strategies for water outlet temperature regulation, identifying water flow rate adjustment as one of the most effective approaches. Maia et al. [12,13] proposed adaptive control strategies for superheat regulation based on experimentally validated mathematical models. In the specific context of DX-SAHP systems, Alvarez [8] applied a PID controller tuned using the ITAE criterion, achieving excellent thermal regulation using carbon dioxide as the refrigerant, and Paulino [14] developed and tested a low-cost control system to regulate the water temperature in a CO2 DX-SAHP and investigated the effect of the expansion valve opening on the system’s performance. The results showed that a static expansion valve can be suitable for stable operation, but an electronic valve is more efficient in responding quickly to sudden variations in solar radiation.
More recent efforts include model predictive control (MPC) [15], variable setpoint strategies, and energy optimization techniques [16,17] for enhancing system performance under diverse operating conditions. Among conventional techniques, proportional–integral–derivative (PID) control remains the most widely adopted solution in industrial applications due to its simplicity, reliability, and ease of digital implementation [18]. The effectiveness of PID control depends on accurate tuning of its parameters. Tuning methods can be empirical, such as Ziegler–Nichols and Cohen–Coon [19], or model-based, such as direct synthesis [20,21], which allows the design of robust controllers that are adapted to the process dynamics.
Although several studies have explored control strategies for DX-SAHP systems, few have addressed the specific challenges imposed by the variable solar input inherent to these systems, especially when natural refrigerants such as R290 are used. This variability significantly influences the system dynamics. Therefore, there remains a clear need for experimentally validated, low-cost, and robust control solutions capable of maintaining stable operation and high efficiency under real residential conditions.
This study presents the design, modeling, embedded implementation, and experimental validation of a digital PID controller for regulating the water outlet temperature in a DX-SAHP system using R290 as the working fluid. The tuning was performed using the direct synthesis method, based on a first-order model identified experimentally. Compared with conventional PID and MPC strategies, the proposed controller provides a simple, reliable, and computationally efficient solution that can be easily implemented in low-cost embedded hardware while maintaining accurate and stable temperature control under variable solar conditions. The proposed work proposes an innovative and cost-effective embedded solution for accurate water temperature control in residential applications. The main innovation of this work lies in the development of a fully embedded and low-cost digital control solution for outlet water temperature regulation in a DX-SAHP using R290, experimentally validated to ensure accuracy, robustness, and applicability to real residential systems.
Although R290 was selected in this study due to its favorable thermodynamic and environmental properties, the proposed control methodology is general and can be adapted to DX-SAHP systems operating with other refrigerants, as long as their dynamic parameters are experimentally identified.
2. Materials and Methods
2.1. Experimental Setup
The DX-SAHP system primarily comprises a solar evaporator, a reciprocating compressor, a counterflow coaxial condenser, a capillary expansion device, and a water pump. R290 is utilized as the working refrigerant. Although R290 is a flammable refrigerant, the total refrigerant charge in the proposed DX-SAHP system is below the 500 g limit established by the International Electrotechnical Commission [22], ensuring compliance with international safety standards. The system operates in a sealed circuit equipped with pressure and temperature sensors for continuous monitoring. These precautions make the use of R290 a safe and viable option for residential solar-assisted heat pump applications.
Table 1 outlines the specifications of the system components. Figure 1 shows the experimental device.

Table 1.
Component characteristics of the DX-SAHP system.
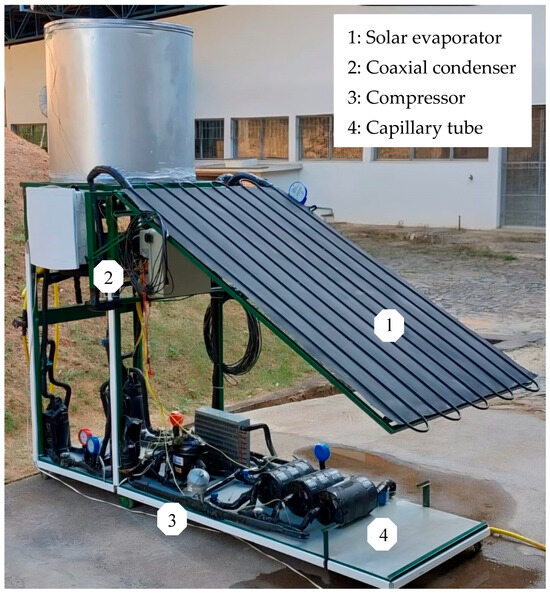
Figure 1.
DX-SAHP prototype.
The experimental setup is equipped with K-type thermocouples for monitoring the temperatures of both the refrigerant and the water, and pressure transducers are employed to record the refrigerant pressure. The refrigerant volumetric flow rate is obtained using a turbine flow meter, and the water flow rate is measured with a rotameter. In addition, a pyranometer is used to measure the incident solar radiation on the evaporator surface. Table 2 summarizes the measurement instruments adopted in this study. A comprehensive description of the prototype is provided by [5].
Table 2.
Uncertainty of the measurement instruments.
Figure 2 shows the detailed diagram of all components of the DX-SAHP prototype.
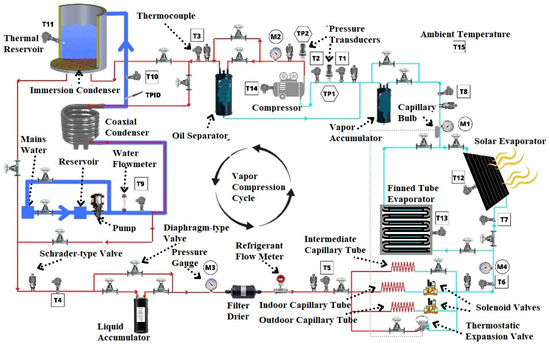
Figure 2.
Detailed diagram of all components of the DX-SAHP prototype.
2.2. Controller Design
This section details the methodology adopted for the controller design. It describes the methodology employed for system model identification, which served as the foundation for the control algorithm development. The tuning method adopted for parameter adjustment is discussed, along with the procedures used to evaluate the robustness of the controller. Finally, the formulation of the control algorithm is presented, highlighting the strategies and criteria considered during its development.
2.2.1. System Modeling and Identification
In order to design the control algorithm, a dynamic model of the system was required. An experimental test was conducted to identify the system’s behavior around the desired operating point of 47.5 °C, which corresponds to the target outlet water temperature. Step changes in water flow rate were applied, and the response in outlet temperature was recorded.
The system was modeled using the ARX (Auto-Regressive with eXogenous inputs) identification method, commonly applied for linear dynamic systems [23]. The ARX structure was chosen because it provides a good balance between model accuracy and computational simplicity, requiring relatively low computational effort for parameter estimation. In addition, it allows direct use of input–output experimental data without the need for detailed physical modeling, which is particularly advantageous for complex thermal systems such as DX-SAHPs [24,25]. Based on the observed input–output data, an ARX model of order p = q = 1 was adopted, resulting in a first-order approximation.
The resulting model was converted into a discrete transfer function using the Z-transform. Then, the Tustin bilinear approximation was applied to convert it to the s-domain, enabling the use of classical continuous-time controller design techniques such as PID.
2.2.2. Controller Tuning Methodology
Once the control system is implemented, the controller parameters must be adjusted to achieve the desired performance—a process known as controller tuning. Although this is often performed through trial and error, the availability of a mathematical model enables the use of systematic tuning methods for more accurate and efficient results.
In this study, the PID controller was tuned using the Direct Synthesis method, which designs the controller based on a desired closed-loop transfer function [19]. This approach requires knowledge of the plant model G(s) and the specification of the desired closed-loop behavior , allowing the controller to be obtained as [21]:
The desired response was defined as a standard second-order system [21]:
Parameters and were selected to provide a well-damped response with adequate speed, considering the thermal characteristics and actuator constraints. A damping ratio of = 0.6 was chosen to limit overshoot while maintaining responsiveness.
The controller transfer function obtained via direct synthesis was formulated in the parallel PID structure, incorporating a derivative filter time constant and accounting for the discrete sampling time. This approach enables practical implementation by smoothing the derivative action and adapting the controller to the digital control environment.
Specifically, the PID parameters Kp, Ki, and Kd, along with the derivative filter time and sampling period, were calculated based on the identified transfer function and the desired closed-loop behavior.
2.2.3. Robustness Analysis
To evaluate the robustness of the designed controller, a parametric uncertainty analysis was conducted. The system parameters were perturbed by ±15% around their nominal values to assess the controller’s ability to maintain stability and desired performance under model variations. In this analysis, the perturbed parameters were the static gain and the time constant of the process model, as they capture the main dynamics of the system.
Step responses were analyzed for both the nominal and perturbed systems to verify that performance remained within acceptable bounds. Controller robustness was evaluated based on system stability and the similarity between the uncertain system responses and the nominal desired response.
2.2.4. Control System Architecture
The control system was designed to operate in a fully embedded environment, eliminating the need for external analog signal conditioning, as reference values are internally generated. The system reads the water temperature using a digital sensor, which outputs data in a digital format, thereby avoiding the need for anti-aliasing filters and external analog-to-digital converters (ADCs).
The measured temperature is compared with the reference setpoint to calculate the control error. This error is processed by a digital PID controller, implemented within the embedded system, to determine the necessary corrective action. The controller output is then converted into a Pulse Width Modulation (PWM) signal, which modulates the duty cycle to control the energy delivered to the actuator.
In this system, the actuator is a DC water pump that regulates the water flow rate. The PWM signal controls the pump’s operation, adjusting the flow dynamically to maintain the desired water outlet temperature. This approach allows for continuous adaptation in response to external disturbances or internal variations.
After each control action, the water temperature is measured again and fed back into the controller, closing the control loop. This real-time feedback ensures that the system maintains stable and accurate temperature regulation throughout operation.
The control system operation is illustrated in Figure 3.
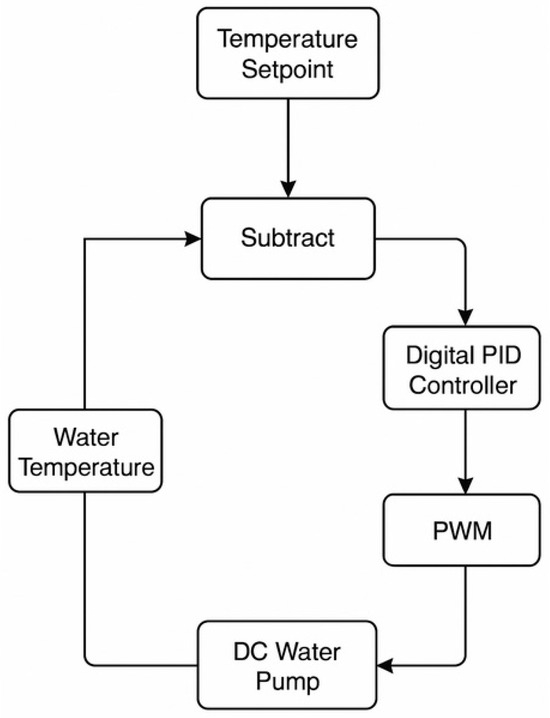
Figure 3.
Block diagram of the temperature control system.
2.2.5. Control Algorithm Formulation
To provide greater flexibility in the controller implementation, the discrete transfer function coefficients were used directly, instead of the conventional PID structure based on proportional, integral, and derivative gains (Kp, Ki, Kd). This approach allows for a mathematically adaptable representation, enabling more precise tuning and facilitating controller adjustments under varying operating conditions without compromising stability or performance.
The digital implementation requires a buffer to store past values of the control signal and the control error. This memory structure allows the controller to compute the current control action based on previous system behavior, increasing robustness and accuracy by accounting for the system’s dynamics rather than relying solely on its current state [18,26].
The control signal is calculated using the difference equation derived from the discrete transfer function, as shown in Equation (3) [23]:
where U[k] is the control output at time step k, E[k] is the control error, and are the transfer function coefficients, and n is the system order.
Once the control signal is calculated, the actuate function processes it by applying a calibration curve to determine the required average voltage. This voltage is then converted to a PWM signal, which is sent to an H-bridge circuit that drives the actuator (water pump), modulating the flow rate accordingly.
2.2.6. Embedded Communication Protocol and Data Logging
Communication between the embedded system and the host computer is established using the MQTT (Message Queuing Telemetry Transport) protocol, a lightweight and efficient messaging protocol widely used in IoT applications due to its low resource consumption and reliability under limited connectivity. In this work, the open-source Mosquitto broker is employed to manage message exchanges between devices. Figure 4 shows the MQTT connection diagram.
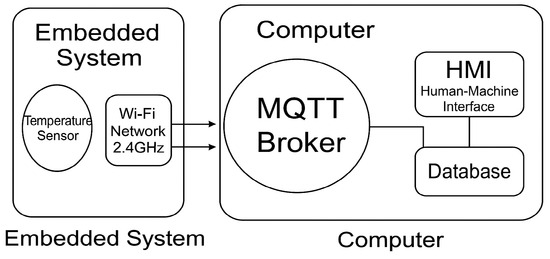
Figure 4.
MQTT Connection Diagram.
The embedded controller, based on an ESP32 module, creates a local Wi-Fi network and publishes messages containing process variables such as measured temperature, control signal, and reference temperature. The host computer connects to the network, subscribes to the relevant MQTT topic, and logs the received data for subsequent analysis.
To simplify communication and data processing, all information is transmitted through a single MQTT topic using JSON (JavaScript Object Notation) format. Each message includes the measured temperature, control signal, reference temperature, and a timestamp, as detailed in Table 3.
Table 3.
Structure of MQTT Messages.
2.3. Embedded Control System Implementation
The developed methodology was implemented by programming the control algorithm on a microcontroller. A dedicated embedded control board was designed and built, incorporating a range of hardware features and instrumentation necessary for system control. The board is based on the ESP32-S3 microcontroller, which operates at up to 240 MHz with dual cores, and includes 2 MB of flash memory, 320 KB of RAM, and 8 MB of PSRAM. Figure 5, Figure 6, Figure 7 and Figure 8 show the electrical diagrams of the developed embedded control board, including the main board layout, power stage, sensing circuits, and input interfaces.
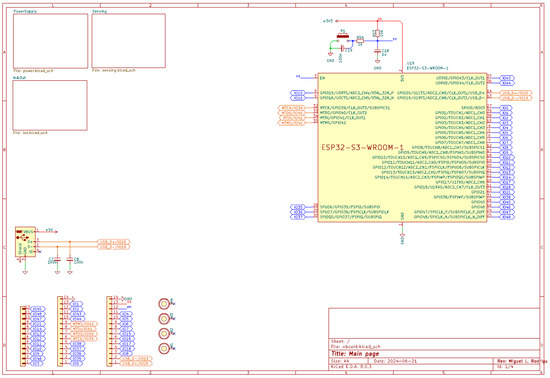
Figure 5.
Electrical schematic: the main board.
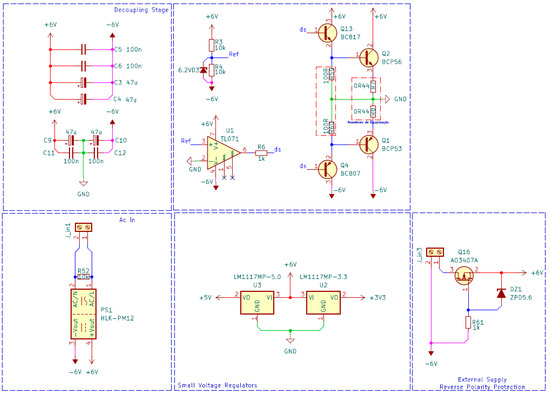
Figure 6.
Electrical schematic: power stage.
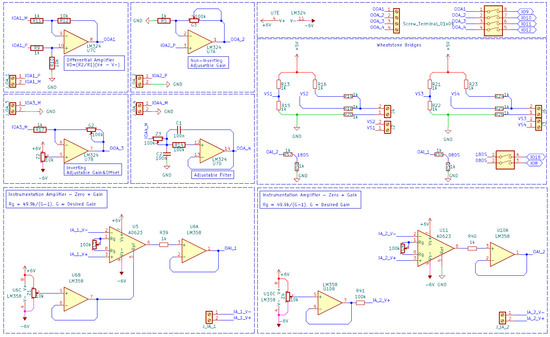
Figure 7.
Electrical schematic: sensing circuits.
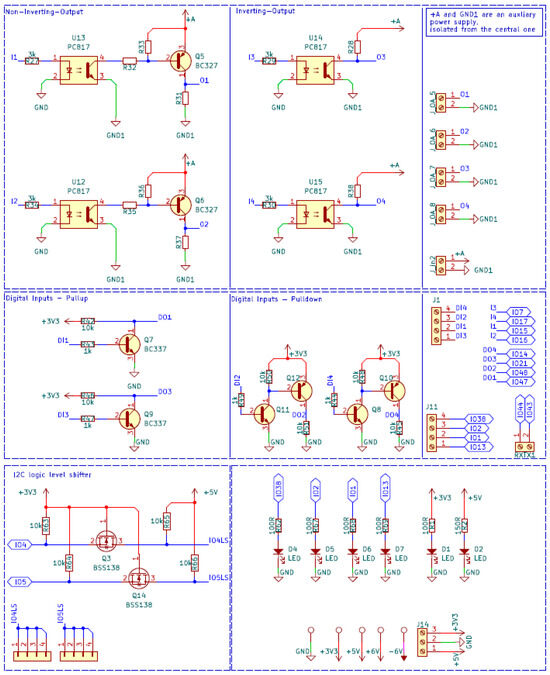
Figure 8.
Electrical schematic: input interfaces.
Additionally, the board integrates two instrumentation amplifiers, opto-isolated outputs, analog inputs with high-impedance buffering and gain/offset adjustment, a second-order Sallen–Key filter, and an I2C communication bus. Power is supplied from a 110 V AC source, with a 1 A fuse installed for protection. Voltage regulators provide stable 3.3 V and 5 V supplies, each capable of delivering up to 1 A for peripheral components. A USB-B connector is available for programming and debugging purposes.
This custom embedded platform enables real-time implementation of the control algorithm, ensuring robust and efficient operation of the system under the experimental conditions.
3. Results
3.1. Experimental Validation of the Identified Model
The resulting model was a first-order linear system, described by Equation (4).
where y(t) is the water temperature at time step t, y(t − 1) is the previous temperature, and u(t) is the control input (water flow rate).
The discrete-time transfer function in the z-domain is presented in Equation (5).
The corresponding continuous-time transfer function, obtained via the bilinear (Tustin) approximation, is given by Equation (6).
where G(s) is the system transfer function, s is the Laplace variable. The model exhibits a negative static gain, indicating that an increase in water flow leads to a decrease in water temperature—a behavior expected for this type of heat exchange system.
Model validation was evaluated by comparing its output with the experimental data. Figure 9 shows that the ARX model accurately reproduces the system behavior.
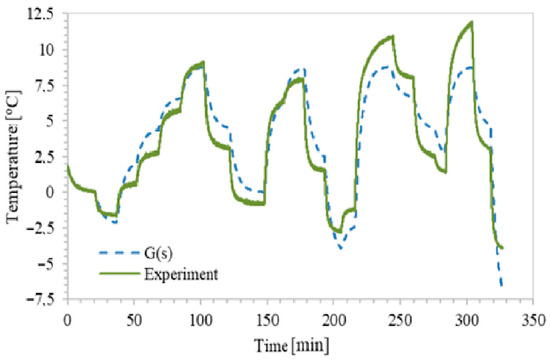
Figure 9.
Comparison between the ARX model and the experimental data.
The model accuracy was quantified using performance indices such as the Root Mean Squared Error (RMSE) and the Normalized Dimensionless Error Index (NDEI). The RMSE was 1.34 °C and the NDEI was 0.32, indicating good agreement between the model and measured data.
In addition, the prediction errors for the water temperature were analyzed. The minimum error was 2.6 × 10−5 °C, the maximum error was 3.8 °C, the mean error was 1.1 °C, and the standard deviation was 1.5 °C. With a 95% confidence interval, the results indicate that the model provides accurate predictions near the operating point of 47.5 °C.
3.2. Digital Controller Implementation
Based on the transfer function obtained in Equation (6), the system’s time constant was determined to be 283 s. For first-order systems, the settling time is typically estimated as four times the time constant [21], which corresponds to approximately 19 min for the system to reach steady-state conditions.
However, as the open-loop response was found to be slow and inadequate for the desired performance requirements, a closed-loop underdamped behavior was adopted to improve the system dynamics. The objective was to enable faster convergence to the steady-state without compromising system stability.
The desired settling time was set to 300 s, which represents a compromise between fast thermal regulation and the limitations of the system. To meet this specification, a damping ratio of = 0.6 was selected, characterizing an underdamped second-order response. With these parameters, the natural frequency ωn was calculated, and the desired closed-loop transfer function was obtained, as expressed in Equation (7).
Figure 10 illustrates a comparison between the open-loop and the desired closed-loop step responses. The open-loop response is clearly slower and fails to meet the performance criteria, taking excessive time to reach steady-state. In contrast, the designed closed-loop response, with a settling time of 300 s, exhibits significantly faster stabilization and efficiently reaches the final value, demonstrating improved performance. This comparison highlights that adopting an underdamped closed-loop configuration significantly enhanced the dynamic behavior of the system.
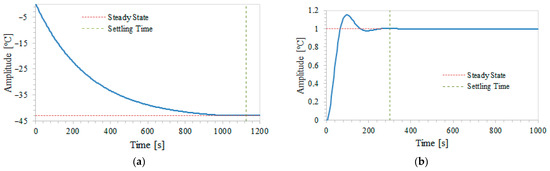
Figure 10.
Step response of the system: (a) open loop and (b) desired closed loop.
Using the desired closed-loop transfer function and the system model, the direct synthesis method was applied to compute a controller that ensures the desired output dynamics, as given in Equation (8).
Since the control algorithm was implemented on an embedded system, the controller had to operate in discrete time. Therefore, the continuous-time transfer function was discretized using the Tustin method, with a sampling time of Ts = 7.5 s. This value was chosen to provide approximately 10 samples per time constant, which is recommended to preserve the system dynamics in the digital domain [20].
The discrete-time controller transfer function is shown in Equation (9).
This transfer function was converted into a set of difference equations, allowing implementation directly in the embedded system. The control law computes the current control signal based on present and past error values, as well as previous control efforts. Given that the transfer function is of second order, the implementation requires storing two past values of both the error and control signals in memory buffers.
The resulting controller was rewritten in the form of a parallel PID structure, and the PID parameters were computed as follows: s, and s.
After obtaining the discrete-time transfer function of the controller, it was applied to the system model to simulate the step response of the closed-loop system. The simulation results, shown in Figure 11, illustrate the improved performance of the system under PID control.
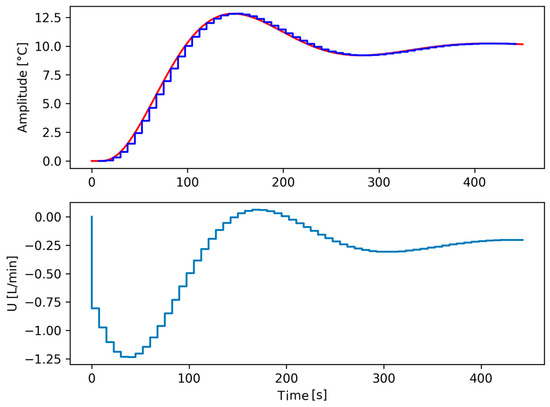
Figure 11.
Simulated step response of the closed-loop system with the designed PID controller.
3.3. Robustness Assessment
The robustness analysis showed that, even under model uncertainties (±15% variation in system parameters), the controller maintained stability and exhibited performance close to that of the nominal system. Step responses were simulated for both the nominal system and perturbed models, as shown in Figure 12.
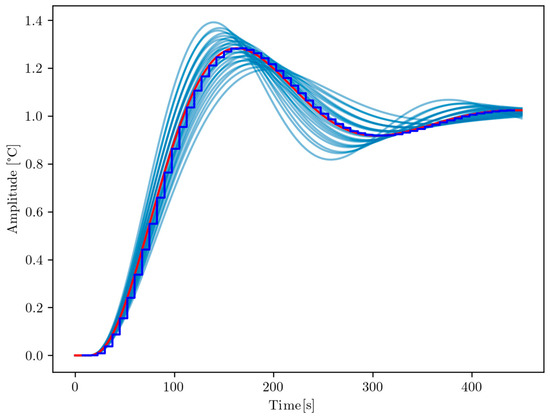
Figure 12.
Robustness analysis of the controller.
Despite parameter variations, the system’s response with uncertainties (blue lines) closely matched the nominal response (red line), indicating that the controller is sufficiently robust to handle uncertainties without significantly compromising performance or stability.
3.4. Simulation Results
The computational simulations were carried out using the dynamic mathematical model developed by [8], who studied the same DX-SAHP system investigated in this work, with the aim of evaluating the performance of the proposed controller. For this purpose, the controller was assumed to operate around the system equilibrium point. Accordingly, the system output signal was offset by subtracting the equilibrium temperature, while the control signal was adjusted by adding the corresponding equilibrium value.
The objective of the simulations was to assess the response of the system under two distinct conditions: a disturbance in the reference signal and a disturbance in the output signal. The first simulation involved a perturbation in the reference input, as illustrated in Figure 13. In this scenario, the system reference was altered, and the controller was responsible for compensating for the variation to maintain the temperature within the desired range. The controller demonstrated effective disturbance rejection, keeping the system temperature stable.
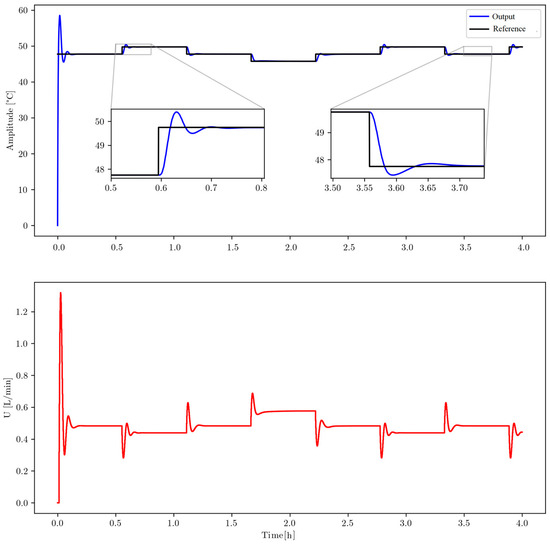
Figure 13.
Closed-loop simulation of the nonlinear system under a reference disturbance.
The second simulation considered a disturbance in the output signal, which corresponds to the controlled variable (temperature), as shown in Figure 14. In this case, the controller had to respond to unexpected changes in the system temperature and restore it to the desired reference value. Once again, the controller exhibited an efficient response, with the temperature promptly corrected back to the setpoint.
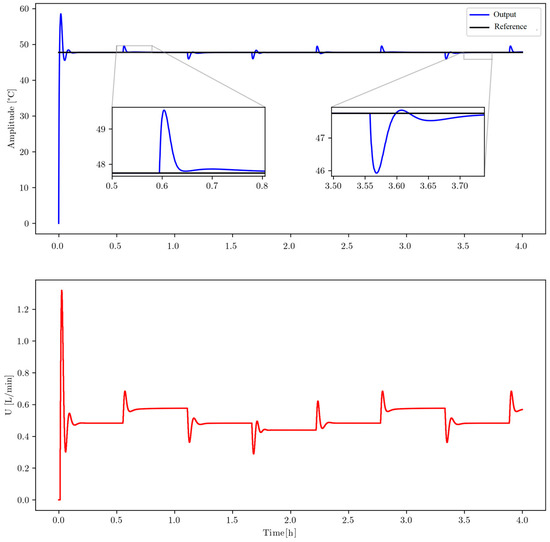
Figure 14.
Closed-loop simulation of the nonlinear system under an output disturbance.
3.5. Experimental Performance Evaluation
To further assess the performance of the developed controller, experimental tests were conducted on the actual system. The reference temperature was set at 47.5 °C, and the experiments aimed to evaluate the system’s ability to reject external disturbances while maintaining the outlet water temperature close to the setpoint.
In the first experiment, the system’s response to inlet water temperature variations was tested using an electric resistor controlled by a variac to induce disturbances. This setup allowed for controlled perturbations at the condenser water inlet. As shown in Figure 15, the controller effectively compensated for these disturbances, maintaining a nearly constant outlet temperature and demonstrating strong disturbance rejection capability.
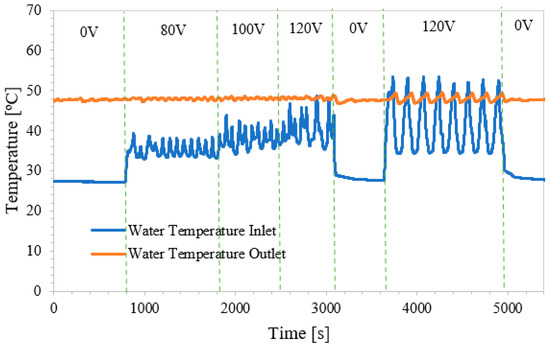
Figure 15.
Experimental test with the controller: inlet water temperature variation.
It is important to note that when the inlet water temperature exceeds the setpoint, the DX-SAHP system does not switch to cooling mode, as it is designed solely for heating. In such cases, the controller reduces or temporarily suspends the compressor and expansion valve actions to prevent overheating, keeping the outlet temperature close to the setpoint, as illustrated in Figure 15.
The second test, illustrated in Figure 16, was conducted under clear-sky conditions with high solar radiation stability. Step disturbances in the incident solar radiation were deliberately introduced using shading devices to simulate sudden changes in irradiance. Despite these abrupt changes, the controller dynamically adjusted the water flow rate, keeping the outlet temperature close to the reference.
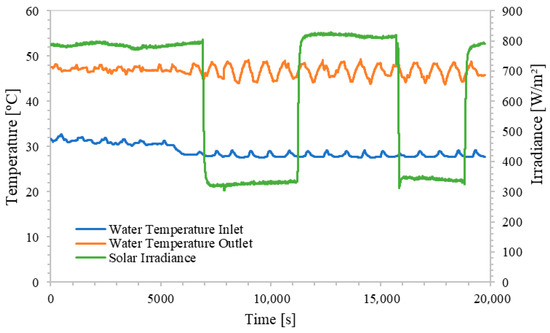
Figure 16.
Experimental test with the controller: solar radiation variation on a clear-sky day.
In the third experiment, the system was evaluated under adverse weather conditions, with high variability in solar irradiance due to cloud cover. In addition to natural fluctuations, controlled disturbances were also applied using shading devices. As presented in Figure 17, the controller remained robust and effective, adjusting the water flow as needed to maintain the outlet temperature near the setpoint, even under highly unstable conditions.
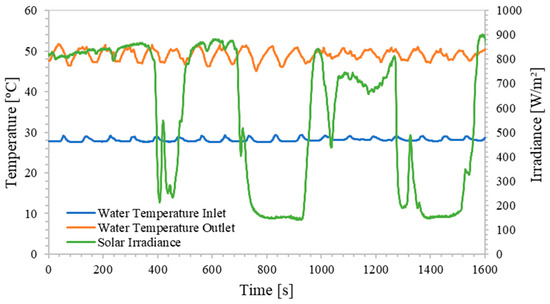
Figure 17.
Experimental test with the controller: solar radiation variation on a cloudy day.
It should be noted that Figure 15 illustrates the system response to inlet water temperature variations only, without the influence of solar radiation, whereas Figure 16 and Figure 17 show the response under varying solar irradiance conditions.
The three experiments confirmed the effectiveness of the proposed controller under different types of disturbances. The ability to maintain a stable outlet water temperature despite significant variations in input conditions (both inlet water temperature and solar irradiance) highlights the good performance, robustness, and practical applicability of the control system in solar-assisted heat pump water heating applications.
4. Discussion
The results presented in this study demonstrate the successful development and validation of a control system for the DX-SAHP water heating process, grounded on a first-order linear model identified from experimental data. The ARX model accurately captured the system dynamics near the operating point, as evidenced by low root mean squared error and normalized dimensionless error index values, and small prediction errors. This confirms the model’s adequacy as a reliable basis for controller design.
The identified system exhibited a slow open-loop response with a time constant of approximately 283 s, leading to an unsatisfactory settling time for practical applications. By adopting an underdamped closed-loop configuration with a damping ratio of 0.6 and a target settling time of 300 s, the controller effectively accelerated system response without compromising stability. This design choice aligns with established control theory principles and improves the transient response significantly, as shown by the comparative step response analysis.
Robustness analysis further highlighted the controller’s resilience to parameter uncertainties of ±15%, with performance degradation minimal and stability preserved. This robustness is essential given the inherent variability in solar irradiance and water inlet conditions typical in real-world solar-assisted heat pump systems.
Simulation results reinforced the controller’s ability to reject disturbances both at the reference input and at the output, consistently restoring system temperature to the setpoint despite perturbations. These findings were substantiated by experimental tests, which confirmed the controller’s practical efficacy under varying inlet water temperatures and highly dynamic solar irradiance conditions—ranging from stable clear-sky days to rapidly fluctuating cloudy periods.
The experimental outcomes demonstrate that the controller maintains the outlet water temperature remarkably close to the reference despite significant external disturbances, confirming robustness and applicability in real operating environments. This robustness and accuracy endorse the proposed control approach as a promising solution for enhancing the performance and reliability of solar-assisted heat pump water heating systems.
Future research may extend this work by investigating adaptive or predictive control strategies to further enhance disturbance rejection capabilities under more extreme or rapidly varying environmental conditions. Integration with energy management systems and longer-term field tests will also be valuable to evaluate real-world operational benefits and energy savings.
5. Conclusions
This work developed and validated a model-based controller for a solar-assisted heat pump water heating system. The proposed solution was implemented as a fully embedded and low-cost digital controller, demonstrating that effective water temperature regulation can be achieved without the need for expensive hardware or complex architectures. The control strategy was based on manipulating the water circulation pump, which proved to be an effective and practical choice compared to alternative options such as expansion valve control. Experimental validation confirmed not only the improvement in response time and robustness to disturbances, but also the ability of the system to maintain stable outlet water temperature even under significant solar irradiance fluctuations.
These results highlight the practical contribution of this work, demonstrating that the proposed embedded control approach is both technically effective and economically viable for residential applications, enhancing system performance and energy efficiency. Furthermore, the proposed embedded PID control system shows strong potential for real-world implementation in residential DX-SAHP units. Its modular and low-cost design facilitates scalability to systems with higher capacities or multiple parallel units. Because the controller is fully digital and based on open-source hardware, it offers potential for integration with smart-grid platforms and home energy management systems, enabling demand-side control and optimizing electricity usage according to dynamic pricing or renewable generation availability. Overall, the use of low-cost components provides an attractive cost–benefit balance for residential or commercial deployment while maintaining precise and stable water temperature regulation.
Author Contributions
Conceptualization, Resende, S.I.d.M.R. and R.N.d.O.; methodology, Resende, S.I.d.M.R.; validation, Resende, S.I.d.M.R.; writing—original draft preparation, Resende, S.I.d.M.R.; writing—review and editing, Resende, S.I.d.M.R., H.A.G.D. and R.N.d.O.; supervision, R.N.d.O. and R.N.d.F. All authors have read and agreed to the published version of the manuscript.
Funding
Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq): doctoral scholarship.
Data Availability Statement
All data supporting the findings of this study are included in the article and are also available from the corresponding author upon reasonable request.
Acknowledgments
The authors appreciate the support of Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq), Fundação de Amparo à Pesquisa do Estado de Minas Gerais (FAPEMIG—Brazil), and Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES—Brazil)—Finance Code 001.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
| ARX | Auto-Regressive with eXogenous inputs |
| DX-SAHP | Direct-expansion solar-assisted heat pump |
| GWP | Global warming potential |
| ITAE | Integral of Time multiplied by Absolute Error |
| JSON | JavaScript Object Notation |
| MPC | Model predictive control |
| MQTT | Message Queuing Telemetry Transport |
| ODP | Ozone depletion potential |
| PID | Proportional–Integral–Derivative |
| PWM | Pulse With Modulation |
| R290 | Propane |
| SAHP | Solar-assisted heat pump |
References
- Chaturvedi, S.K.; Shen, J.Y. Thermal performance of a direct expansion solar-assisted heat pump. Sol. Energy 1984, 55, 453–466. [Google Scholar] [CrossRef]
- Fan, Y.; Zhao, X.; Han, Z.; Li, J.; Badiei, A.; Akhlaghi, Y.; Liu, Z. Scientific and technological progress and future perspectives of the solar assisted heat pump (SAHP) system. Energy 2021, 229, 120719. [Google Scholar] [CrossRef]
- Rabelo, S.N.; Paulino, T.F.; Duarte, W.M.; Maia, A.A.T.; Machado, L. Experimental analysis of the influence of the expansion valve opening on the performance of the small size CO2 solar assisted heat pump. Sol. Energy 2019, 190, 255–263. [Google Scholar] [CrossRef]
- Luz, A.P.; Diniz, H.A.G.; Duarte, W.M.; Machado, L. Experimental study and semi-empirical model of a thermostatic expansion valve of a R290 direct-expansion solar heat pump. Int. J. Refrig. 2024, 163, 56–70. [Google Scholar] [CrossRef]
- Diniz, H.A.G.; Resende, S.I.d.M.; Maia, A.A.; Machado, L.; Oliveira, R.N. Development, experimental validation through infrared thermography and applications of a mathematical model of a direct-expansion solar-assisted heat pump with R290 based on energy, exergy, economic and environmental (4E) analyses. Sol. Energy 2023, 260, 94–110. [Google Scholar] [CrossRef]
- Diniz, H.A.G.; Resende, S.I.d.M.; Luz, A.P.; Machado, L.; Oliveira, R.N. Energetic, exergetic, environmental and economic (4E) analysis of a direct-expansion solar-assisted heat pump with low GWP refrigerant. Int. J. Refrig. 2023, 154, 84–98. [Google Scholar] [CrossRef]
- Resende, S.I.M.; Diniz, H.A.G.; Machado, L.; Faria, R.N.; Oliveira, R.N. Dynamic modeling of an R290 direct-expansion solar-assisted heat pump: Performance analysis for efficient hot water production under different conditions. J. Build. Eng. 2025, 100, 111687. [Google Scholar] [CrossRef]
- Alvarez, C.E.C. Projeto de um Controlador Para o Ajuste da Temperatura de Saída da Água de uma Bomba de Calor a CO2 com Evaporador Solar. Master’s Thesis, UFMG, Belo Horizonte, Brazil, 2015. [Google Scholar]
- Åström, K.J.; Murray, R.M. Feedback Systems: An Introduction for Scientists and Engineers; Princeton University Press: Princeton, NJ, USA, 2008. [Google Scholar]
- Rasmussen, H.; Larsen, L.F.S. Non-linear and adaptive control of a refrigeration system. IET Control Theory Appl. 2011, 5, 364–378. [Google Scholar] [CrossRef]
- Choi, J.M. Study on the LWT control schemes of a heat pump for hot water supply. Renew. Energy 2013, 54, 20–25. [Google Scholar] [CrossRef]
- Maia, A.A.T.; Koury, R.N.N.; Machado, L. Development of a control algorithm employing data generated by a white box mathematical model. Appl. Therm. Eng. 2013, 54, 120–130. [Google Scholar] [CrossRef]
- Maia, A.A.; Horta-Gutierrez, J.C.; Koury, R.N.; Machado, L. Superheating control using an adaptive PID controller. HvacR Res. 2014, 20, 424–434. [Google Scholar] [CrossRef]
- Paulino, T.F. Experimental and Theoretical Study of the Dynamic Response of a Small Size CO2 Direct Expansion Solar Assisted Heat Pump. Ph.D. Thesis, UFMG, Belo Horizonte, Brazil, 2019. [Google Scholar]
- Wang, W.; Hu, B.; Wang, R.Z.; Luo, M.; Zhang, G.; Xiang, B. Model predictive control for the performance improvement of air source heat pump heating system via variable water temperature difference. Int. J. Refrig. 2022, 138, 169–179. [Google Scholar] [CrossRef]
- Sun, Y.; Li, X.; Wei, W.; Xue, H.; Wang, W.; Deng, S. Development of a variable water temperature control method for air source heat pump based on the supply–demand balance. Sustain. Energy Technol. Assess. 2022, 52, 102366. [Google Scholar] [CrossRef]
- Liu, Y.; Nan, X.; Han, H.; Li, J. The variable water temperature control strategy of the air-source heat pump compatible with floor heating system for an apartment. J. Build. Eng. 2024, 90, 109440. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Seborg, D.E.; Edgar, T.F.; Mellichamp, D.A.; Doyle, F.J. Process Dynamics and Control, 3rd ed.; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA—The Instrumentation, Systems, and Automation Society: Research Triangle Park, NC, USA, 2006. [Google Scholar]
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice Hall: Hoboken, NJ, USA, 2010. [Google Scholar]
- IEC-60335-2-89:2019; Household and Similar Electrical Appliances—Safety—Part 2-89: Particular Requirements for Commercial Refrigerating Appliances with an Incorporated or Remote Refrigerant Unit or Motor-Compressor. International Electrotechnical Commission: Genebra, Switzerland, 2019.
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall: Hoboken, NJ, USA, 1999. [Google Scholar]
- Homod, R.Z. Review on the HVAC System Modeling Types and the Shortcomings of Their Application. J. Energy 2013. [Google Scholar] [CrossRef]
- Rincon, F.D.; Le Roux, G.A.; Lima, F.V. A Novel ARX-Based Approach for the Steady-State Identification Analysis of Industrial Depropanizer Column Datasets. Processes 2015, 3, 257–285. [Google Scholar] [CrossRef]
- Åström, K.J.; Wittenmark, B. Computer-Controlled Systems: Theory and Design, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).