
Fault Arc Detection Method Based on Improved ShuffleNet V2 Network


Abstract
1. Introduction
2. Construction of Fault Arc Current Database
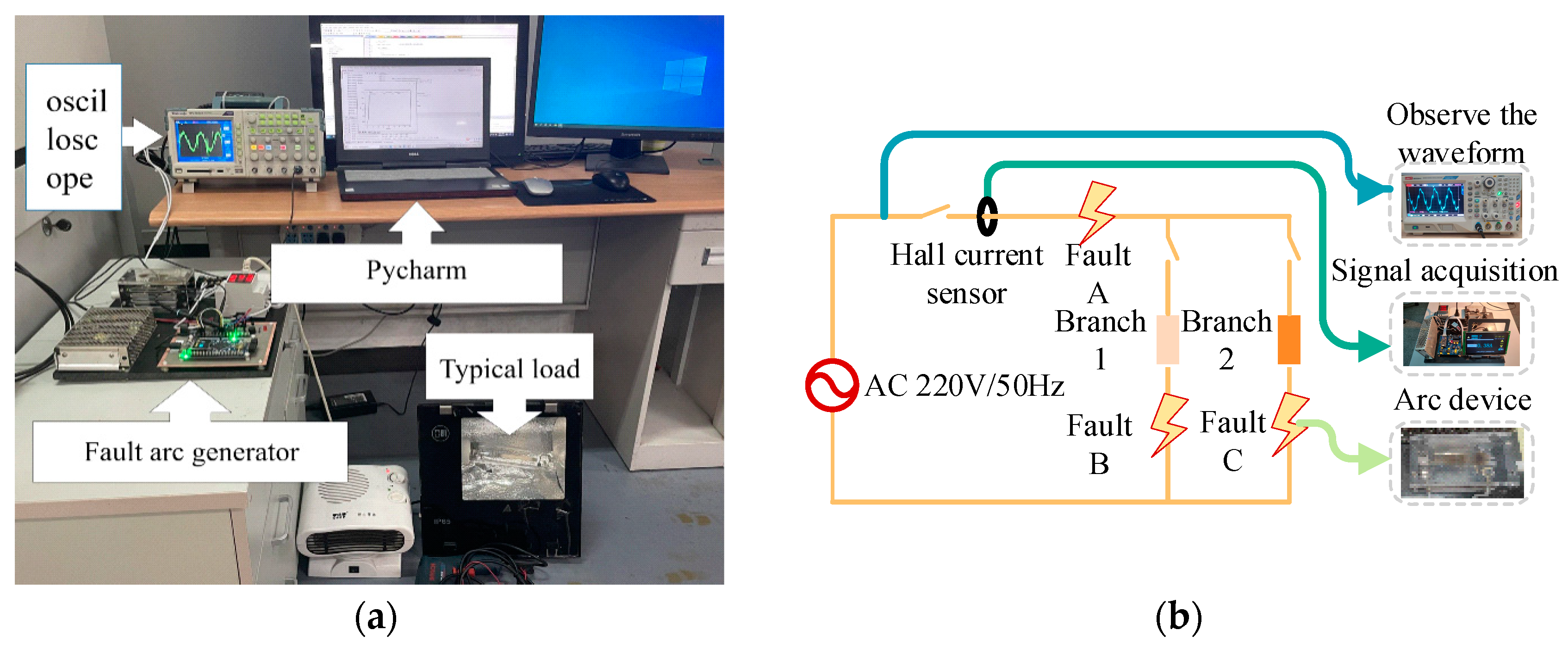
2.1. Design of Experimental Platform
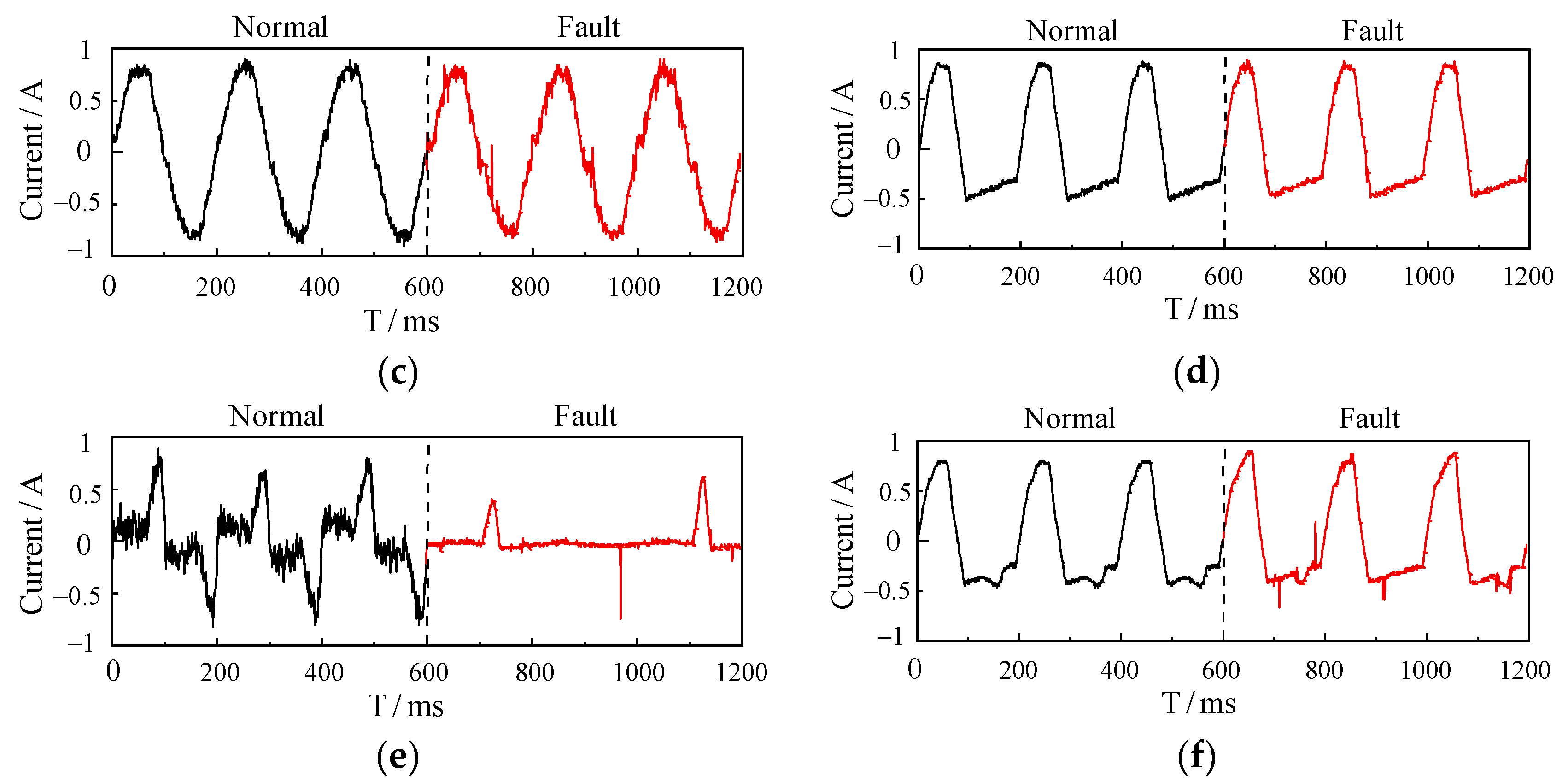
2.2. Data Collection and Preprocessing
3. Detection Model Establishment
4. Improved ShuffleNet V2 Network
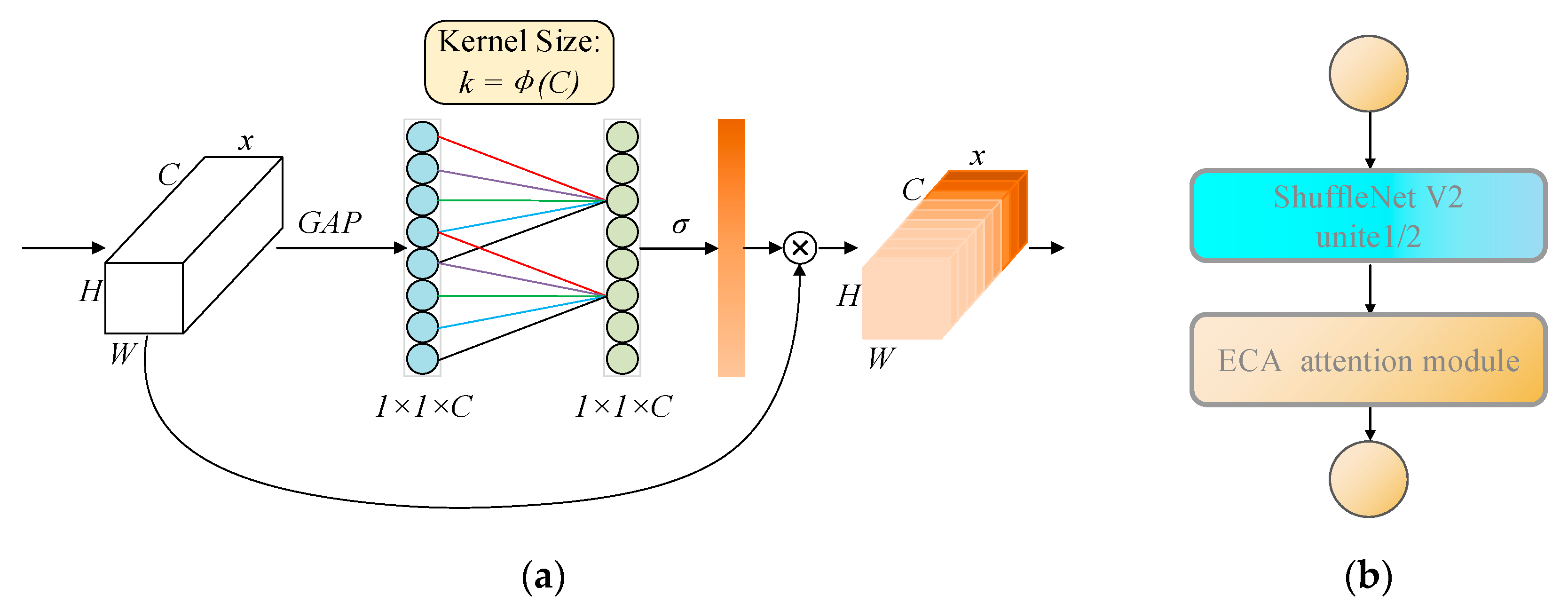
4.1. Network Structure Improvement
4.2. Softmax Loss Function
5. Experimental Results and Analysis
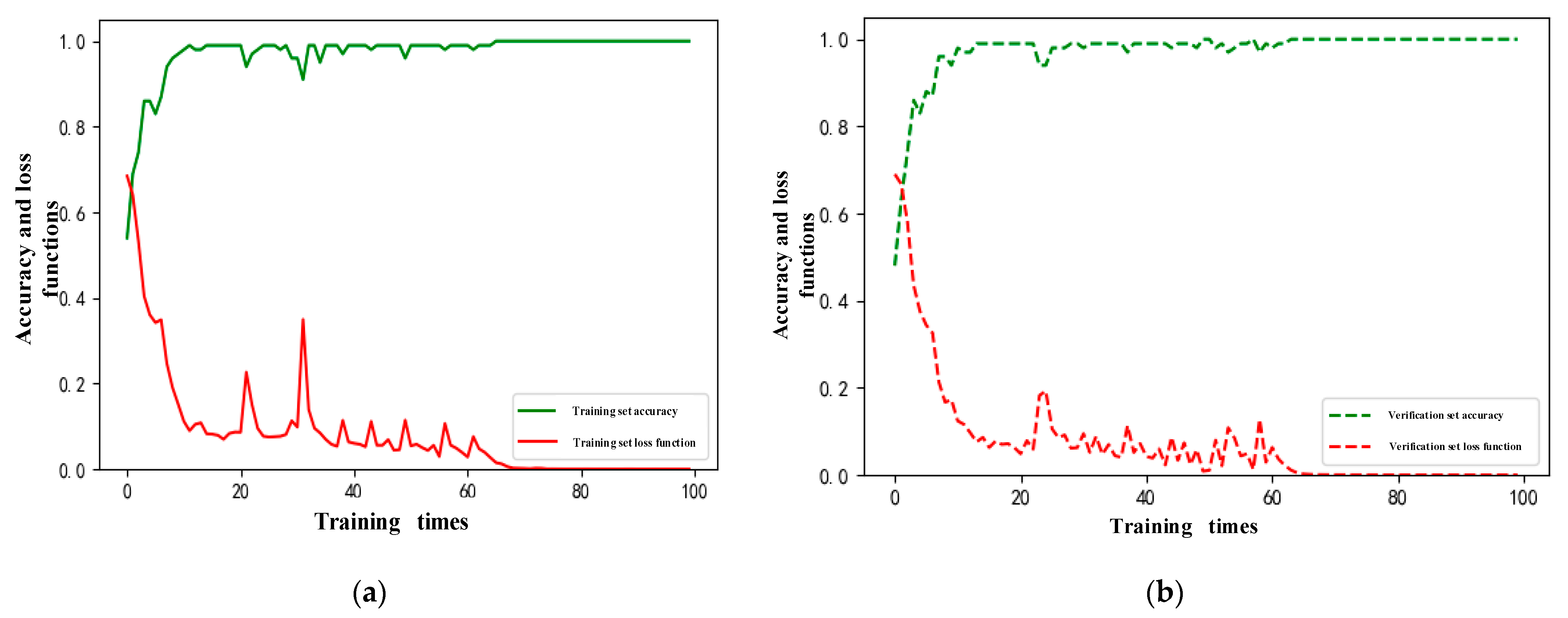
5.1. Verification of Series Fault Arc Detection Model
5.2. Model Detection Result Analysis
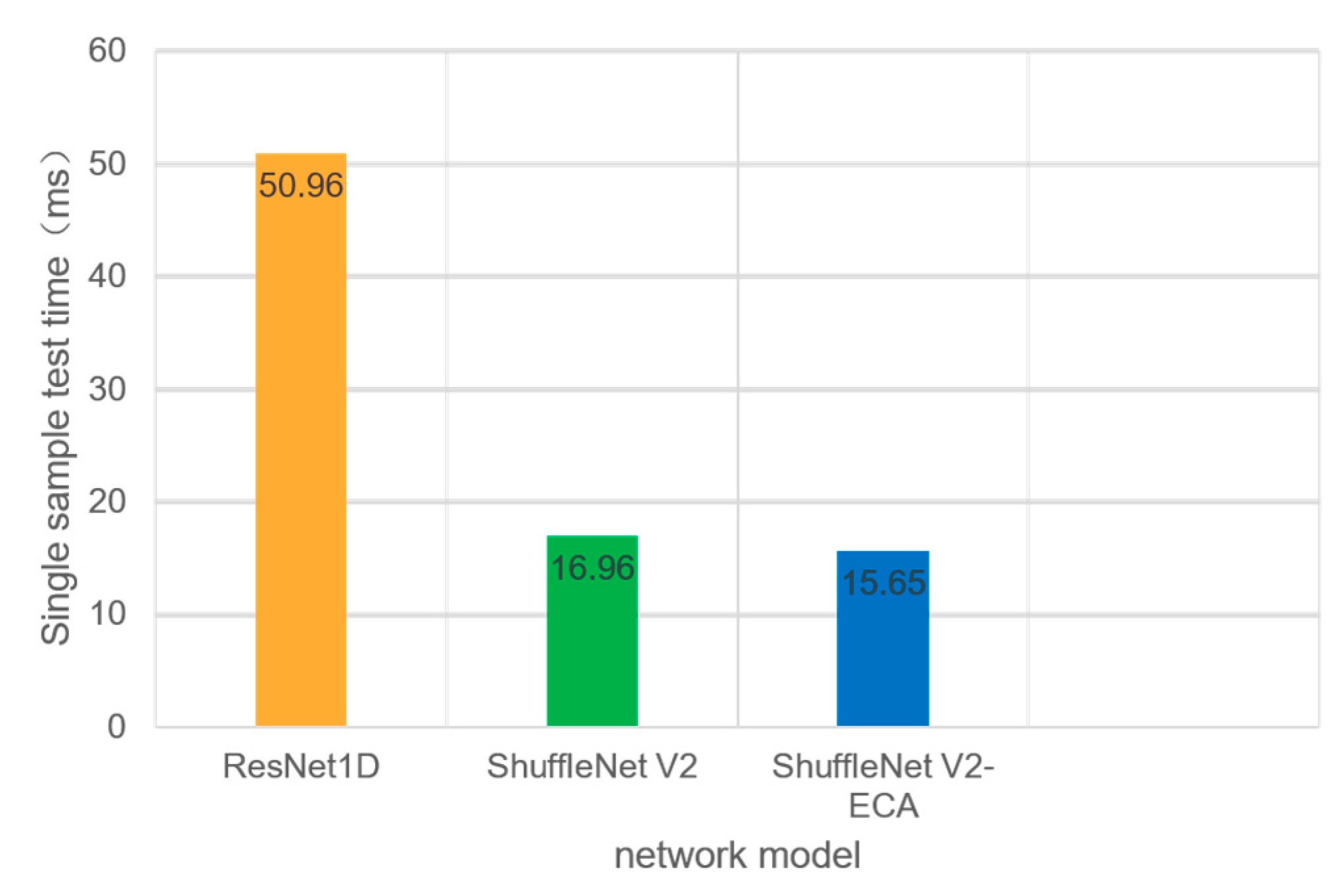
5.3. Performance Test of Embedded Equipment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qu, N.; Wang, J.; Liu, J. An Arc Fault Detection Method Based on Current Amplitude Spectrum and Sparse Representation. IEEE Trans. Instrum. Meas. 2019, 68, 3785–3792. [Google Scholar] [CrossRef]
- UL 1699-1999; Standard for Safety for Arc Fault Circuit Interrupters. Underwriters Laboratories: Northbrook, IL, USA, 1999.
- Alsumaidaee, Y.A.M.; Yaw, C.T.; Koh, S.P. Detecting arcing faults in switchgear by using deep learning techniques. Appl. Sci. 2023, 13, 4617. [Google Scholar] [CrossRef]
- Seeley, D.; Sumner, M.; Thomas, D.W.P.; Greedy, S. DC Series Arc Fault Detection Using Fractal Theory. In Proceedings of the 2023 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Venice, Italy, 29–31 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Riba, J.R.; Moreno-Eguilaz, M. Arc fault protections for aeronautic applications: A review identifying the effects, detection methods, current progress, limitations, future challenges, and research directions. IEEE Access 2022, 10, 56789–56802. [Google Scholar] [CrossRef]
- Ananthan, S.N.; Bastos, A.F.; Santoso, S.; Feng, X.; Penney, C.; Gattozzi, A.; Hebner, R. Signatures of Series Arc Faults to Aid Arc Detection in Low-Voltage DC Systems. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, F.; Ren, Z.; Wang, P.; Nguyen, T.N.; Zheng, J.; Zhang, X. Feature Analysis in Time-Domain and Fault Diagnosis of Series Arc Fault. In Proceedings of the 2017 IEEE Holm Conference on Electrical Contacts, Denver, CO, USA, 10–13 September 2017; pp. 306–311. [Google Scholar] [CrossRef]
- Wang, C.; Wang, M.; Wang, A.; Zhang, X.; Zhang, J.; Ma, H.; Yang, N.; Zhao, Z.; Lai, C.S.; Lai, L.L. Multiagent deep reinforcement learning-based cooperative optimal operation with strong scalability for residential microgrid clusters. Energy 2024, 314, 134165. [Google Scholar] [CrossRef]
- Rau, S.-H.; Lee, W.-J. DC Arc Model Based on 3-D DC Arc Simulation. IEEE Trans. Ind. Appl. 2016, 52, 5255–5261. [Google Scholar] [CrossRef]
- Kim, J.C.; Neacşu, D.O.; Ball, R.; Lehman, B. Clearing Series AC Arc Faults and Avoiding False Alarms Using Only Voltage Waveforms. IEEE Trans. Power Deliv. 2020, 35, 946–956. [Google Scholar] [CrossRef]
- Yu, Q.; Zhang, Y.; Lu, W. Multi-Branch Series Arc Fault Detection Based on MEEMD and GRU Network. In Proceedings of the 2022 4th International Symposium on Smart and Healthy Cities (ISHC), Shanghai, China, 16–17 December 2022; pp. 78–84. [Google Scholar] [CrossRef]
- Duan, P.; Xu, L.; Ding, X.; Ning, C.; Duan, C. An Arc Fault Diagnostic Method for Low Voltage Lines Using the Difference of Wavelet Coefficients. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications (ICIEA), Hangzhou, China, 9–11 June 2014; pp. 401–405. [Google Scholar] [CrossRef]
- Chen, H.; Liu, X.; Shi, H.; Chen, M.; Zheng, J. DC Series Arc Fault Diagnosis and Feature Extraction. In Proceedings of the 2023 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 27–29 October 2023; pp. 1–2. [Google Scholar] [CrossRef]
- Cheng, H.; Chen, X.; Xiao, W.; Wang, C. Short-Time Fourier Transform Based Analysis to Characterize Series Arc Fault. In Proceedings of the 2009 2nd International Conference on Power Electronics and Intelligent Transportation System (PEITS), Shenzhen, China, 19–20 December 2009; pp. 185–188. [Google Scholar] [CrossRef]
- Artale, G.; Cataliotti, A.; Cosentino, V.; Di Cara, D.; Di Stefano, A.; Ditta, V.; Panzavecchia, N.; Tinè, G.; Zinno, A. Measurement of Time Domain Parameters for Series Arc Fault Detection: Sensitivity Analysis in the Presence of Noise. In Proceedings of the 2024 IEEE 22nd Mediterranean Electrotechnical Conference (MELECON), Porto, Portugal, 25–27 June 2024; pp. 668–673. [Google Scholar] [CrossRef]
- Liu, S.; Dong, L.; Liao, X.; Cao, X.; Wang, X.; Wang, B. Application of the Variational Mode Decomposition-Based Time and Time–Frequency Domain Analysis on Series DC Arc Fault Detection of Photovoltaic Arrays. IEEE Access 2019, 7, 126177–126190. [Google Scholar] [CrossRef]
- Chen, F.; Li, S.; Han, J.; Ren, F.; Yang, Z. Review of Lightweight Deep Convolutional Neural Networks. Arch. Comput. Methods Eng. 2024, 31, 1915–1937. [Google Scholar] [CrossRef]
- He, Z.; Xu, Z.; Zhao, H.; Li, W.; Zhen, Y.; Ning, W. Detecting Series Arc Faults Using High-Frequency Components of Branch Voltage Coupling Signal. IEEE Trans. Instrum. Meas. 2024, 73, 3528413. [Google Scholar] [CrossRef]
- Han, C.X.; Wang, Z.Y.; Tang, A.X.; Guo, F.Y. Recognition Method of AC Series Arc Fault Characteristics Under Complicated Harmonic Conditions. IEEE Trans. Instrum. Meas. 2021, 70, 3509709. [Google Scholar] [CrossRef]
- Jiang, J.; Wen, Z.; Zhao, M.; Bie, Y.; Li, C.; Tan, M.; Zhang, C. Series Arc Detection and Complex Load Recognition Based on Principal Component Analysis and Support Vector Machine. IEEE Access 2019, 7, 47221–47229. [Google Scholar] [CrossRef]
- Nishimura, R.; Higaki, M.; Kitaoka, N. Mapping Acoustic Vector Space and Document Vector Space by RNN-LSTM. In Proceedings of the IEEE 7th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 13 December 2018; pp. 329–330. [Google Scholar] [CrossRef]
- Wang, Y.; Hou, L.; Paul, K.C.; Ban, Y. ArcNet: Series AC arc fault detection based on raw current and convolutional neural network. IEEE Trans. Power Electron. 2021, 37, 12410–12422. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Li, Y.; Guo, F. Series Arc Fault Diagnosis and Line Selection Method Based on Recurrent Neural Network. IEEE Access 2020, 8, 177815–177822. [Google Scholar] [CrossRef]
- Yang, K.; Chu, R.; Zhang, R.; Xiao, J.; Tu, R. A Novel Methodology for Series Arc Fault Detection by Temporal Domain Visualization and Convolutional Neural Network. Sensors 2020, 20, 162. [Google Scholar] [CrossRef] [PubMed]
- GB/31143-2014; General Requirements for Arc Fault Detection Devices. National Standards of People’s Republic of China: Beijing, China, 2014.
- IEC 62606-2013; General Requirements for Arc Fault Detection Devices. International Electrotechnical Commission: Geneva, Switzerland, 2013.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Name | Rated Power |
| Vacuum cleaner | 1200 W |
| Capacitor start motor | 2200 W |
| Induction cooker | 2000 W |
| Electric iron | 1100 W |
| Electronic variable speed hand drill | 800 W |
| Fluorescent lamp with electronic ballast | 36 W |
| Variable frequency air conditioner | 2500 W |
| Infrared disinfection cabinet | 700 W |
| Batch | AccuracyRate |
| 1 | 99% |
| 2 | 97% |
| 3 | 98% |
| 4 | 98% |
| 5 | 97% |
| Average value | 97.8% |
| Load Type | Category | Accuracy (%) |
| Resistive load | 0 | 99.27% |
| 1 | 98.98% | |
| Inductive load | 2 | 91.20% |
| 3 | 89.60% | |
| Capacitive load | 4 | 97.67% |
| 5 | 98.50% |
| Batch | Algorithm | Accuracy (%) |
| 1 | AlexNet | 85.25% |
| 2 | PB neural network + WT | 95.58% |
| 3 | Improved AlexNet | 97.5% |
| 4 | TDV-CNN | 97.7% |
| 5 | SRFCNN | 97.67% |
| 6 | GLGCO-SVM | 94.7% |
| 7 | ShuffleNet V2-ECA | 97.8% |
| Algorithm | Time per Sample (ms) |
| ShuffleNet V2 | 16.96 |
| AlexNet | 35.12 |
| PB neural network + WT | 28.47 |
| SRFCNN | 30.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Lu, Y.; Fan, L.; Xiang, K.; Ma, H. Fault Arc Detection Method Based on Improved ShuffleNet V2 Network. Processes 2025, 13, 135. https://doi.org/10.3390/pr13010135
Huang Y, Lu Y, Fan L, Xiang K, Ma H. Fault Arc Detection Method Based on Improved ShuffleNet V2 Network. Processes. 2025; 13(1):135. https://doi.org/10.3390/pr13010135
Chicago/Turabian StyleHuang, Yuehua, Yun Lu, Liping Fan, Kun Xiang, and Hui Ma. 2025. "Fault Arc Detection Method Based on Improved ShuffleNet V2 Network" Processes 13, no. 1: 135. https://doi.org/10.3390/pr13010135
APA StyleHuang, Y., Lu, Y., Fan, L., Xiang, K., & Ma, H. (2025). Fault Arc Detection Method Based on Improved ShuffleNet V2 Network. Processes, 13(1), 135. https://doi.org/10.3390/pr13010135