Abstract
Recently, there has been widespread and vital adoption of flexible manipulators due to their increased prevalence. This is attributed to the growing demand for flexibility in various tasks like refueling operations, inspections, and maintenance activities. Nevertheless, these robots are under-actuated systems characterized by a nonlinear behavior and present dynamic coupling interactions that contribute to the complexity of the control process. The main control objective is to achieve an accurate tracking of the desired position while simultaneously reducing oscillations occurring in the link. Therefore, this paper proposes integrating the tuning and adaptive control by employing fuzzy logic methodology in conjunction with internal model control (IMC). The suggested controller takes advantage of intelligent techniques, simple structure, robustness, and easy tuning of the conventional IMC. Both triangular and trapezoidal Membership Functions (MFs) are applied in this study to create a pair of Fuzzy Logic Controllers (FLCs) based on the Mamdani method. These controllers are employed to dynamically adjust the parameters of the IMC, in contrast to the fixed parameters used in the conventional IMC approach. The effectiveness of the suggested Adaptive-based Fuzzy IMC (AFIMC) is showcased through simulation and practical experimentation, in scenarios both with and without disturbances. Results indicate that this technique outperforms conventional IMC in achieving control objectives and rejecting disturbances.
1. Introduction
Robotic manipulators are frequently utilized for their ability to perform monotonous tasks quickly and with a high level of precision [1]. Moreover, they are able to function in hazardous environments that would be unsafe for human laborers, such as aerospace or deep-sea discoveries. Furthermore, these manipulators have the capability to perform various duties as part of automated production lines across several industries. For instance, they are used in product manufacturing processes along with agricultural requirements while also functioning within healthcare institutions, making them adaptable tools. In conjunction with all the advantages listed above, robotic manipulators offer economic benefits alongside increased efficiency levels leading towards enhanced safety measures [2].
The typical approach for designing and constructing most robotic manipulators involves maximizing stiffness to minimize vibrations and enhance the positional accuracy of the end-effector. Consequently, these robots tend to have a bulkier design and rely on heavy materials and powerful actuators. Despite advancements in manipulator design, vibrations can still affect the end-effector’s performance, especially when functioning at high speeds or handling heavy loads. To improve productivity in industrial applications, two strategies are often pursued: reducing arm weight or increasing operating speed [3]. Realizing these objectives often involves the development of flexible robotic manipulators, which offer several advantages over rigid ones, such as cost-effectiveness, energy efficiency, higher operational speed, and improved maneuverability due to the reduced inertia [3,4]. Consequently, these types of manipulators have found applications in various domains, including medical sectors [5], manufacturing sectors [6] and aerospace industries [7].
Recently, there has been a growing interest in under-actuated robotic systems because of their diverse applications and potential advantages [8]. An under-actuated system possesses a smaller number of control inputs than outputs. Real-world examples of under-actuated systems include underwater vehicles, helicopters, mobile robots, legged robots, airplanes, and a category of manipulators [9]. The occurrence of under-actuation is caused by a number of things: (1) inherent dynamics of the system; (2) designs aimed at cost-effectiveness or specific practical goals; and (3) nonholonomic constraints in systems with multiple degrees of freedom (DOF) [8,10]. This complicates the controller design process for under-actuated systems, and techniques like feedback linearization, which simplifies controller design for fully actuated systems, cannot be directly applied to these types of systems.
A Rotary Flexible Joint (RFJ) robot is one of the most common examples of an under-actuated flexible manipulator. It has an actuated joint and an under-actuated rotating joint joined by two springs. The control of the rotational joint is challenging because of the absence of dedicated rotational actuators and the flexibility and nonlinearity caused by the springs. Consequently, conventional control methods might struggle to ensure effectiveness and stability, which are consistently valued in industrial applications where accuracy in the assigned tasks is always a priority. Nevertheless, with an RFJ, the presence of flexibility and inherent joint vibration introduces oscillations in the output, impeding the attainment of the desired level of accuracy. Hence, the development of a controller that is capable of tracking the desired position while reducing oscillations of the rotary joint is of utmost importance [11].
To tackle this concern, several control methods have been applied to control robot manipulators. These include linear and nonlinear strategies such as the Proportional–Integral–Derivative (PID) [2,12,13], the Linear Quadratic Regulator (LQR) [14,15], Iterative Learning Control [16], Fuzzy Logic Control (FLC) [17], and the Recursive Neural Network (RNN) [18]. In [19,20,21], authors introduced a distributed nonlinear control approach for a rotary flexible link manipulator. PID controllers are widely utilized in industry contexts because of their attractive and advantageous features. They are relatively straightforward to tune and implement, robust against small parameter fluctuations and disturbances, and work well in a variety of control engineering applications.
In [12], two PID controllers were directly designed from data using an emerging auto-tuning algorithm, namely the Adaptive Safe Experimentation Dynamics algorithm, and were employed for an RFJ system. In [2], a predefined performance function (PPF) was introduced to design a fractional-order PID (FOPID) controller for the RFJ. The use of FOPID allows greater flexibility, resulting in enhanced robustness, while the PPF improves the performance of the transient response and reduces oscillations. The authors in [13] introduced a novel nonlinear self-adjusting PID controller (NSPIDC) designed for regulating both the joint position and link deflection of a flexible-link manipulator (FLM) under varying payload conditions. The FLM parameters are continuously identified through the use of the recursive least square (RLS) algorithm. The control parameters are dynamically updated in real time, employing minimum variance control (MVC) laws. The NSPID controller is implemented in real time on an experimental setup, and its performance is compared with a widely used direct adaptive controller (DAC). Results confirm that the proposed controller outperforms the DAC, demonstrating enhanced precision in position tracking and rapid damping of link deflections under changing payloads. In [14,15], an LQR controller was employed to control flexible manipulators. However, when the system involves some complex features such as high nonlinearity, parameter variation, and large disturbances, the efficiency of these controllers diminishes. Consequently, other strategies such as IMC have been used to improve effectiveness and overcome these restrictions.
Hence, to address this challenge and enhance both robustness and tracking performance, the design of internal model control (IMC) has incorporated parameter auto-tuning and adaptive control techniques rather than being fixed. Adaptive IMC (AIMC) was first introduced in 1996 by Datta and Ocha to ensure stability and robustness, even in cases of modeling mismatch. Recently, numerous studies employing an adaptive IMC-PID approach applied for temperature and/or level control systems, characterized as First-Order Plus Dead Time (FOPDT) systems [22,23,24]. The integration of fuzzy logic has been utilized to autonomously adjust controller parameters according to the present operating conditions, errors, and changes in errors. For instance, in [25], the authors combined the FLC technique with the backstepping design algorithm to develop a novel adaptive fuzzy tracking backstepping control method for a single-link flexible manipulator. Similarly, the authors in [26] proposed an adaptive fuzzy dynamic surface control (DSC) scheme for single-link flexible-joint robotic systems with input saturation.
This paper introduces AFIMC for controlling an RFJ. The suggested approach merges the strengths of FLC and conventional IMC. The motivation behind this technique is to overcome the limitations of the fixed closed-loop tuning parameters of the conventional IMC-PID controller when dealing with complex processes. Most nonlinear processes exhibit complex and dynamic behavior and are often subject to disturbances, parameter variations, and uncertain operating conditions. The fixed parameters of the conventional IMC controller may not be robust enough to handle these uncertainties effectively. By introducing adaptability through fuzzy logic, the controller can adjust its parameters continuously based on the latest process operating conditions, allowing for better handling of nonlinearities. This also results in improved control performance and faster response to changes in operating conditions. The main control objective encompasses tracking the desired trajectory while simultaneously reducing oscillations in the joint. The novelty of our work lies in the integration of fuzzy logic with IMC to control an under-actuated robotic system. Additionally, a comparative analysis involving simulations and experiments is carried out between AFIMC and traditional IMC. Significantly, this study evaluates the tracking performance, disturbance rejection, and robustness of both control strategies. The results highlight that, in the context of this application, AFIMC outperforms traditional IMC, particularly in the presence of modeling mismatch, uncertainties, and disturbances in this application.
The rest of the paper is structured as follows. In Section 2, the RFJ under study is expounded, along with its modeling. The conventional IMC design process for under-actuated systems is covered in Section 3. Section 4 presents the development of the Fuzzy Logic Controller and its application in autonomously tuning the time constant of the closed-loop system with IMC. The simulation results for the RFJ are showcased in Section 5, considering both cases, in the absence and in the presence of disturbances, to examine the effectiveness and capability of the implemented adaptive controllers in rejecting disturbances. The experimental setup and outcomes are provided in Section 6. Finally, Section 7 concludes the paper and outlines prospects for future endeavors.
2. System Description and Modeling
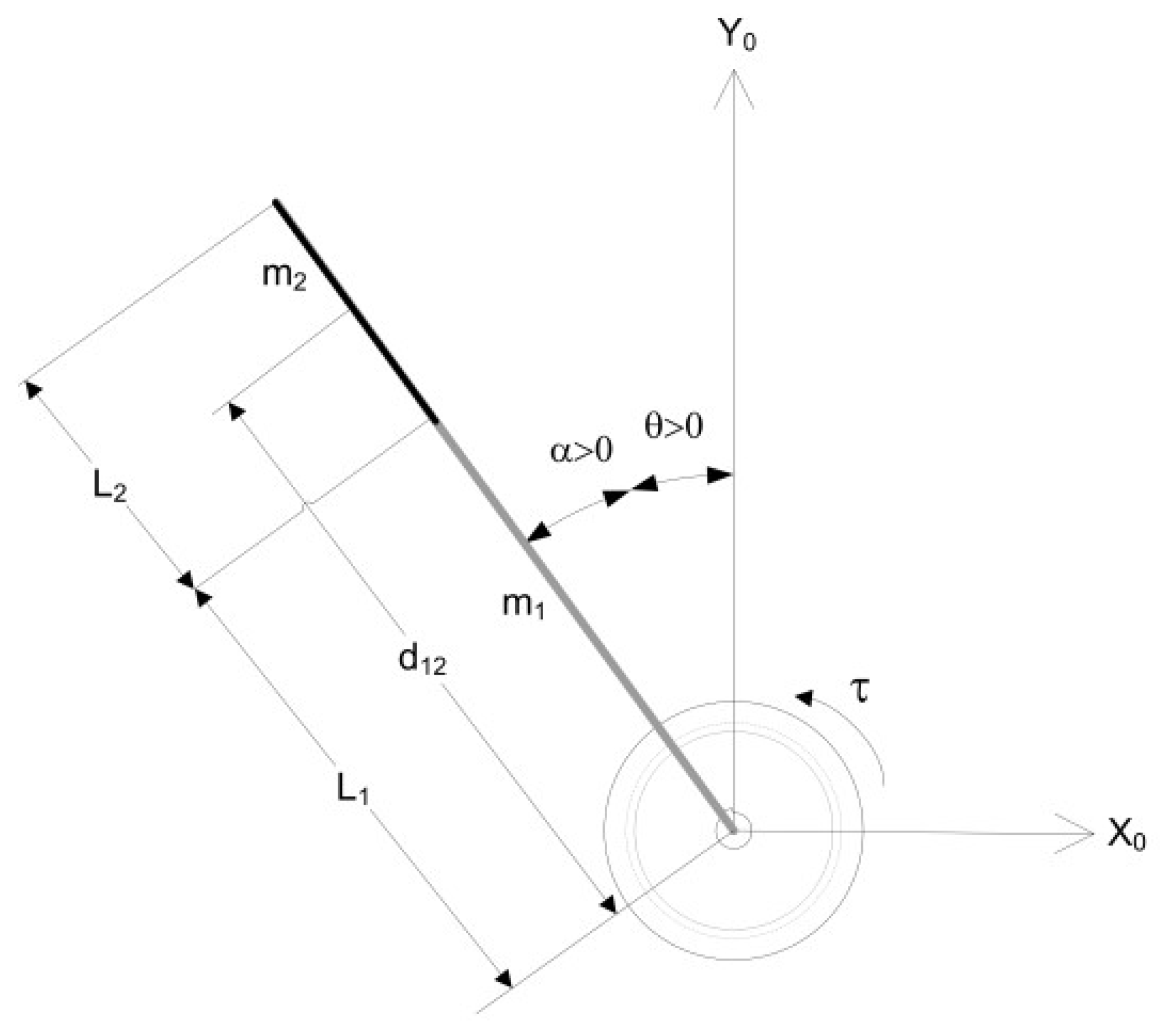
This research employs the RFJ robot’s model to assess the effectiveness of the conventional IMC and AFIMC controllers. The diagram shown in Figure 1 illustrates the schematic of the RFJ. The variable represents the angular displacement of the rotary arm (referred to as the servo angle), and indicates the deflection angle that represents the vibrations in the joint. The counterclockwise rotation of the arm in the horizontal plane positively increases the vibration angle, . The shorter arm possesses length and mass , while the longer arm connected to the pivot has length and mass . The distance, , between the motor shaft and the center of the shorter arm may be adjusted, resulting in changes in the moment of inertia of the arm. The main beam features three anchor positions for the springs, allowing the use of varying stiffnesses of the springs. Additionally, the torque applied by the servo motor is denoted by .
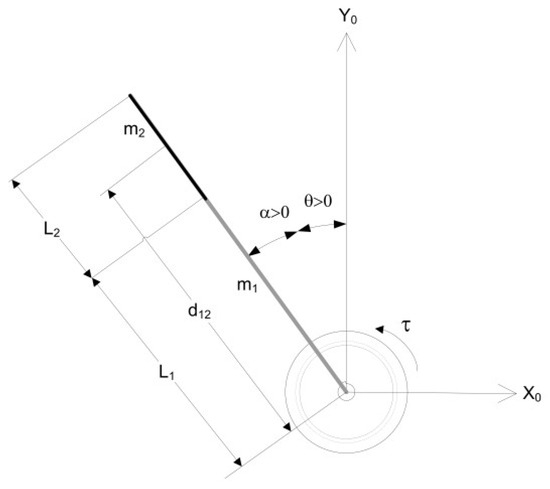
Figure 1.
Illustration of the RFJ.
The RFJ represents a complex system that is coupled, nonlinear, and under-actuated, having a single input and two outputs. The system takes in a voltage input that powers the motor and produces two outputs, namely and . In a recent study [27], a detailed linear dynamic model of the RFJ system is described through a pair of differential equations.
These equations involve two distinct forms of inertia. is the equivalent inertia of the rotary servo base unit, while is the inertia of the entire link. The symbol represents the viscous friction coefficient of the servo, which signifies the resistance to the applied torque at the servo load gear. Furthermore, corresponds to the damping coefficient associated with the friction acting on the link, and denotes the stiffness of the linear springs. Additionally, the torque, , that is exerted at the RFJ’s servo base unit is denoted as follows:
where represents the motor torque constant, and indicates the gear ratio. Moreover, and denote the efficiencies of the motor and gearbox, respectively. Additionally, represents the back-emf constant of the motor, while the armature resistance is denoted by . The RFJ robot parameter specifications are provided in Table 1.

Table 1.
RFJ robot specifications [28].
Subsequently, the linear state-space representation of the RFJ system can be formulated as follows:
where denotes the states vector, while is the voltage, , applied to the motor. Matrices of the state-space model above are defined as follows:
Then, when the joint’s viscous damping, , is disregarded and the system parameter values are inserted, the resulting transfer functions can be obtained from the state-space model as follows:
such that a, K, and are defined as
3. Internal Model Control for RFJ Robot
As illustrated in Equation (5), the transfer matrix is not square due to the RFJ’s under-actuated nature. As previously stated, it is essential for the model to closely resemble the transfer function of the plant, i.e., . Moreover, the transfer function, , of the controller should approximate the inverse of . Nevertheless, the challenge arises from the fact that the transfer matrix, , needs to be square for the inversion process. To address this challenge, a set of transfer functions is incorporated into the transfer matrix, , to transform it into a square matrix, as described in [29]. To simplify the analysis and avoid any issues related to inversion or stability, the additional blocks are chosen as first-order transfer functions, having a pole with a negative real part [30,31]. Consequently, the RFJ system may employ the same traditional IMC structure designed for fully actuated multiple-input and multiple-output systems. The resultant matrix, , is shown below:
where equals and equals , while and are the additional first-order transfer functions with a negative real pole () to ensure invertibility conditions of the matrix, , and stability conditions of the controller, . This fact makes a square matrix, and consequently, internal model control can be derived as follows:
such that is a low-pass filter (LPF) that is characterized by the following general structure:
such that n is the order of the LFP, and and are the tuning parameters. Furthermore, the choice of “n” is made in such a way that it renders a proper function. Meanwhile, and are directly proportional to the robustness and inversely proportional to the closed-loop response speed, as explained in [32]. That is why the tuning of and is essential to strike the right balance between robustness and performance.
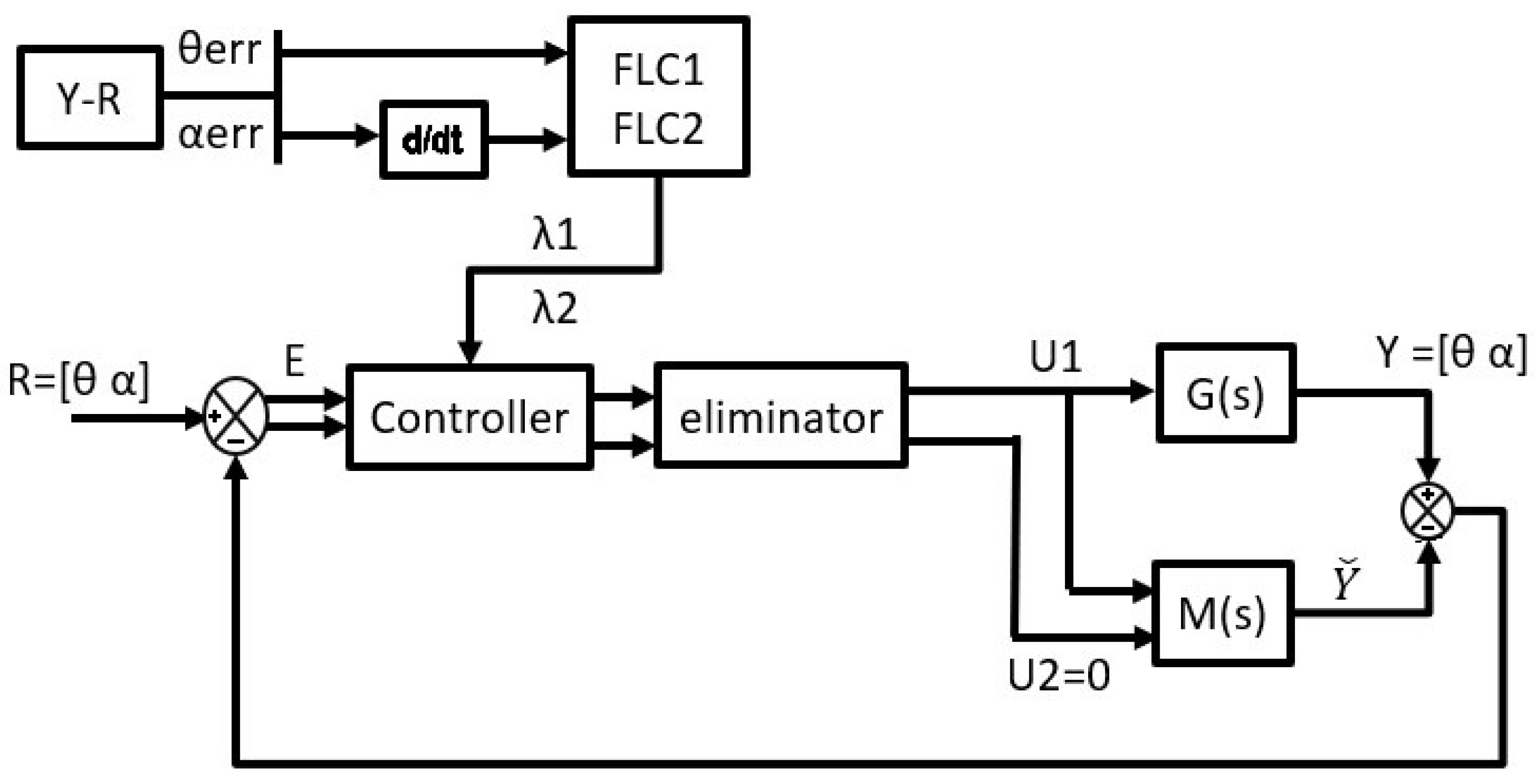
Additionally, to eliminate the excess control inputs acting on the added components of , adjustments are made to the IMC structure originally designed for multiple-input and multiple-output fully actuated plants. This modification involves incorporating an eliminator employing standard arithmetic operations into the IMC scheme [33], as illustrated in Figure 2.
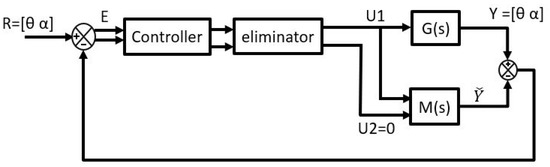
Figure 2.
Block diagram of IMC for the RFJ robot.
After the eliminator terminates the excess control input, the control input vectors and act on the process, , and model, , respectively, are as follows
where and are the control input signals defined as follows:
Thus, the outputs of the system will be:
4. Intelligent Adaptive-Based Fuzzy IMC
4.1. Design of AFIMC
In this paper, two Fuzzy Logic Controllers (FLCs) using the Mamdani approach were designed for the RFJ system. These controllers comprise twenty-five fuzzy rules organized as if-else statements with triangular and trapezoidal MFs. Each FLC involves a pair of inputs and a single output. The first FLC receives the error of the servo angle () and its derivative, whereas the second FLC receives the error of the deflection angle () and its derivative. Moreover, utilizing the error and its derivative in the case of and , these FLCs calculate the closed-loop system time constants, namely and . This is intended to achieve accurate angle tracking while minimizing the vibrations. The selection of these MFs is based on their ability to provide a balance between computational efficiency and accuracy in representing fuzzy sets. Triangular MFs are chosen for their simplicity and ease of computation. The process of forming fuzzy rules involves defining a set of if-then statements that describe the system’s behavior under various conditions. The main concept in designing the rules is to choose a smaller when the output moves away from the desired value (e and have the same sign) and a larger when the output approaches the desired value (e and have opposite signs).
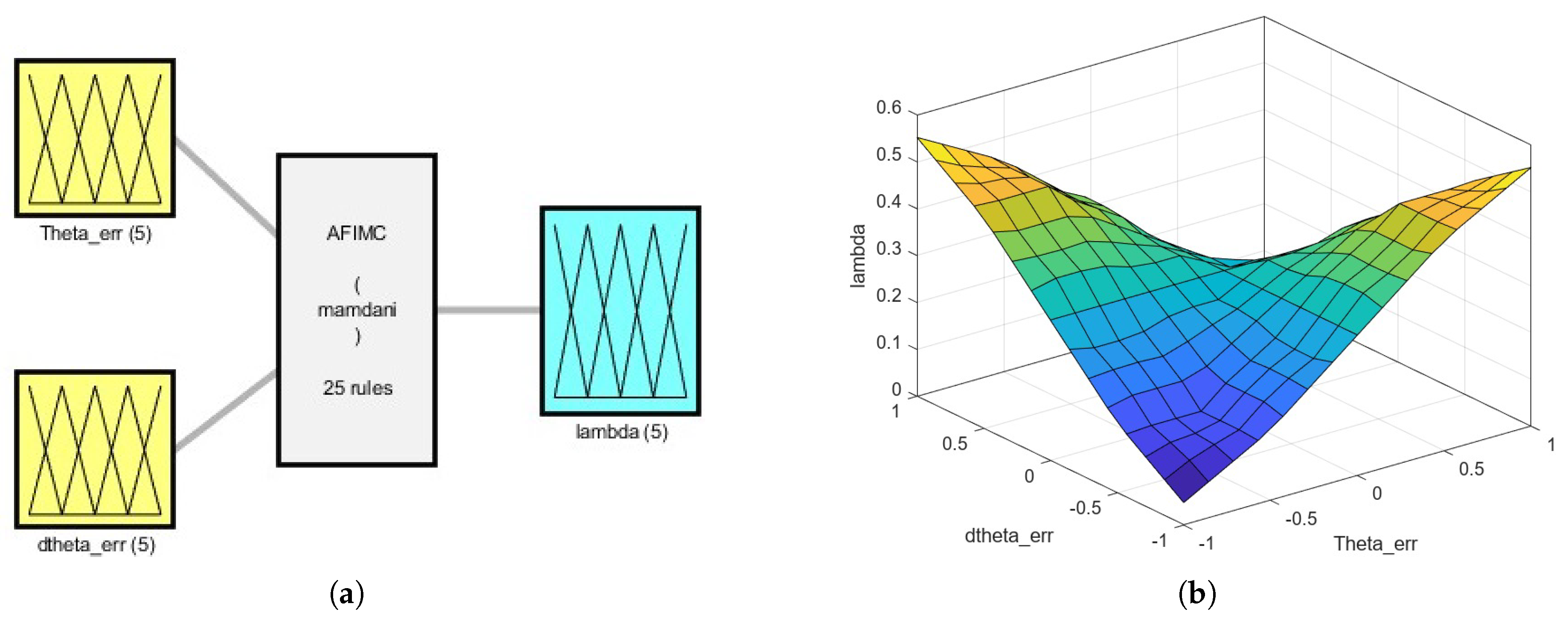
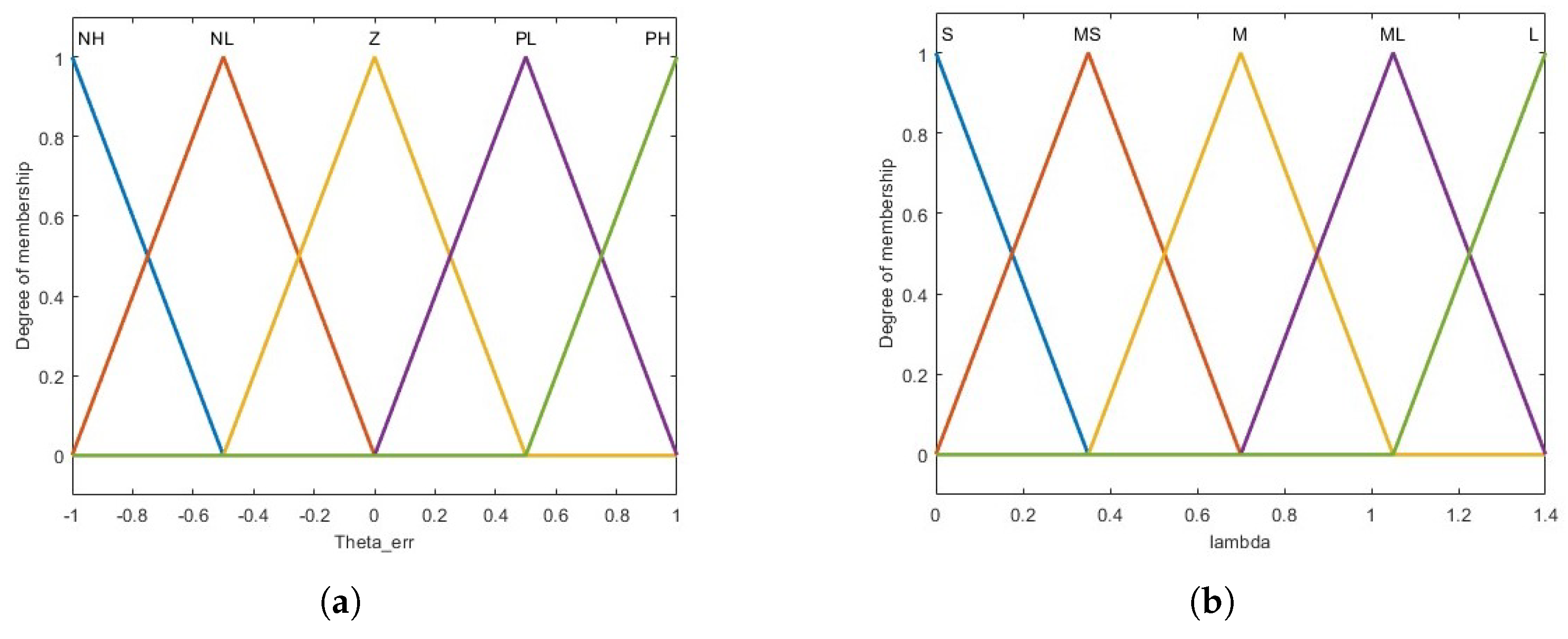
Figure 3a presents the proposed FLC1 inputs/output block diagram. As can be seen from Figure 3b, FLC1 has two inputs and a single output. The inputs are the error and change in the error of the servo angle (), and the output is the closed-loop time constant, . Figure 3b represents the FLC1 control surface plot that illustrates how the output varies depending on the values of the inputs based on the fuzzy rules designed. Meanwhile, Figure 4a exhibits the MFs for the inputs of FLC1, categorized into five linguistic terms: positive high, positive low, zero, negative low, and negative high. Notably, both the inputs and outputs of the Fuzzy Logic Controller are characterized by two trapezoidal and three triangular MFs. The normalized input’s range of discourse spans from −1 to 1. Additionally, FLC2’s MFs are similar to FLC1, although with distinct ranges. is defined across five levels: large, medium–large, medium, medium–small, and small. Furthermore, Figure 4b shows the output alongside its respective MFs. The output’s range of discourse for these FLCs extends from 0 to , where denotes the initial value of the parameter utilized in traditional IMC.
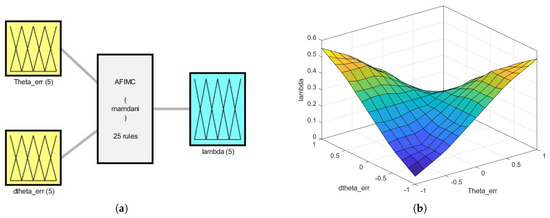
Figure 3.
Proposed FLC1: (a) inputs/output block diagram, (b) Fuzzy Logic Control surface.
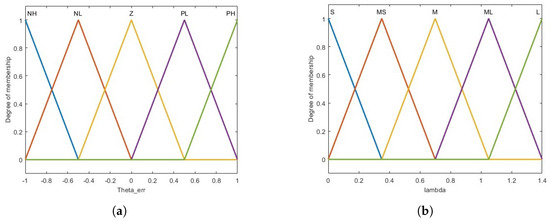
Figure 4.
FLC1 MFs for: (a) inputs, (b) output.
The last step in the design process of the FLC is the defuzzification. In this study, the centroid defuzzification method was used due to its ability in obtaining a precise output from fuzzy systems and its simplicity [34]. The centroid defuzzification method can be mathematically described as:
where L is the centroid (crisp output), which in this application is the values of and . x is a variable representing the domain of the output fuzzy set, is the membership function of the fuzzy set A, and a and d are the points where the membership function starts and ends. The closed-loop system after adding the FLC is illustrated in Figure 5.
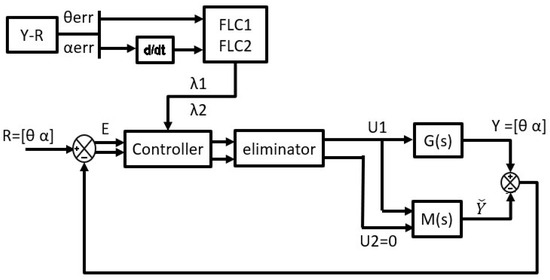
Figure 5.
Block diagram of AFIMC for RFJ.
4.2. Stability Analysis
Garcia and Morari [35], and Saxena and Hote [32] highlighted three key properties of the IMC control strategy that contribute to its popularity in controller design: dual stability, perfect control, and zero offset. According to the “dual stability” property, in the absence of model–plant mismatch, the overall closed-loop system’s stability depends on the stability of both the controller, , and the process plant, . This property provides a sufficient criterion for ensuring the stability of the overall closed-loop system [36].
Proof.
By applying the “dual stability” property to the process plant under study, . According to (5), does not have any right half-plane poles. Regarding the controller, , it can be observed from Equation (8) that is the inverse of the model multiplied by a low-pass filter . To ensure that the inversion does not yield an unstable controller, any non-minimum phase elements (right-half plane zeros and time delays) of the plant must be factorized. In this study, the plant model transfer function, (also ), does not contain any non-minimum phase elements (no zeros of are on the right-half plane), assuring stable inversion of the plant model. □
The added transfer functions and are first-order transfer functions with a left-half plane pole. The filter, , is stable as long as the parameter is positive. This ensures that the poles of the filter are located in the left half-plane, contributing to the overall stability of the controller, , and, consequently, closed-loop system stability. Therefore, values of and adjusted by the FLC should be positive to maintain the stability.
5. Simulation
In this research, the previously established RFJ model is employed to evaluate the performance of the proposed AFIMC controller in comparison with the conventional IMC method, utilizing MATLAB/SIMULINK tools. The objective of this section is to present simulation results to demonstrate the effectiveness of the suggested approach when dealing with noisy measurements, uncertainties, and external disturbances. The desired value of the motor angle, , is a step signal with an amplitude equal to 20 degrees, and the desired value of the deflection angle, , is zero. The simulations consider four different cases:
- Case 1
- The simulation is performed in ideal operating conditions without any uncertainties or disturbances.
- Case 2
- In this case, an impulse disturbance is added to the input of the robot model, , at s.
- Case 3
- The measurements for the motor angle, , and the deflection angle, , are assumed to contain a band-limited white noise with a power of .
- Case 4
- This case considers a uncertainty for the true parameters of the robot model, .
Figure 6 illustrates the performance of both controllers under undisturbed conditions. From the acquired responses, it is evident that both controllers effectively track the desired positional angle, , while mitigating the vibration angle, , until the RFJ is stable or with very small values that can be neglected. Figure 7 shows the effect caused by an impulse disturbance, added at time s. Typically, both controllers show disturbance rejection capabilities and provide a good performance tracking of the reference signal. Nevertheless, the proposed AFIMC exhibits a relatively lesser impact from the disturbance and returns slightly faster to its desired angles.
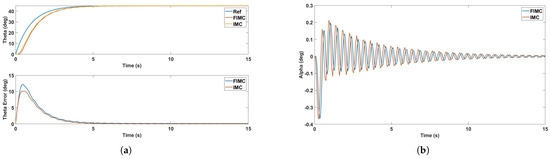
Figure 6.
IMC vs. AFIMC tracking control in the absence of disturbances. (a) tracking, error; (b) tracking.
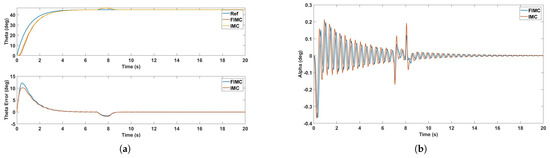
Figure 7.
IMC vs. AFIMC tracking control under an impulse disturbance. (a) tracking, error; (b) tracking.
Figure 8 depicts the effects of band-limited white noise added to the output of the RFJ plant () on the performance of both controllers. The added white noise has a power of and sampling time equal to 0.5. As shown in Figure 8, both controllers are affected by the added noise. However, the performance of AFIMC is less affected, and the steady state error remains small when compared with conventional IMC. It is also shown that the proposed controller has better noise immunity because it is able to mitigate the vibrations in the joint better than conventional IMC. Figure 9 shows the effects of a parameter variation on conventional IMC compared with AFIMC. Due to the fact that the IMC controller is a model-based controller, it is crucial to possess a model that is nearly accurate. As the parameters of the RFJ system are altered, the mismatching between the model and the actual plant increases. Consequently, this mismatching affects the performance of the IMC controller, leading to a degradation in its tracking performance. On the other hand, AFIMC is able to handle such a problem and maintain good tracking.
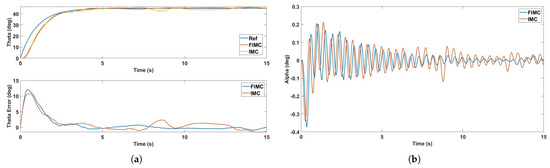
Figure 8.
IMC vs. AFIMC tracking control in the presence of a white noise disturbance. (a) tracking, error; (b) tracking.
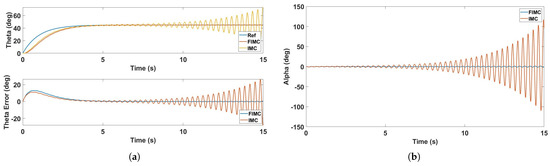
Figure 9.
IMC vs. AFIMC tracking control in the presence of a parameter variation. (a) tracking, error; (b) tracking.
Table 2 provides a comparison of the performance of IMC and AFIMC across the four cases, focusing on the Integra Absolute Error (IAE) and Mean Square Error (MSE) metrics for both outputs of the RFJ. The proposed AFIMC shows better performance than TSC in the deflection angle alpha, , in cases 1 to 3, with significant improvement in case 4. However, it has a slightly higher error in the position angle, , which performs well in this metric. Furthermore, in cases 3 and 4, AFIMC shows improvement in both and tracking. These results demonstrate AFIMC’s robustness in handling more challenging scenarios, providing superior accuracy and reference tracking compared with IMC. Overall, the proposed method provides a balanced improvement across most metrics, suggesting its potential for applications requiring precise control of the position angle with minimized deflection.
Table 2.
Table of metrics for various cases.
6. Experimental Validation
6.1. Experimental Setup
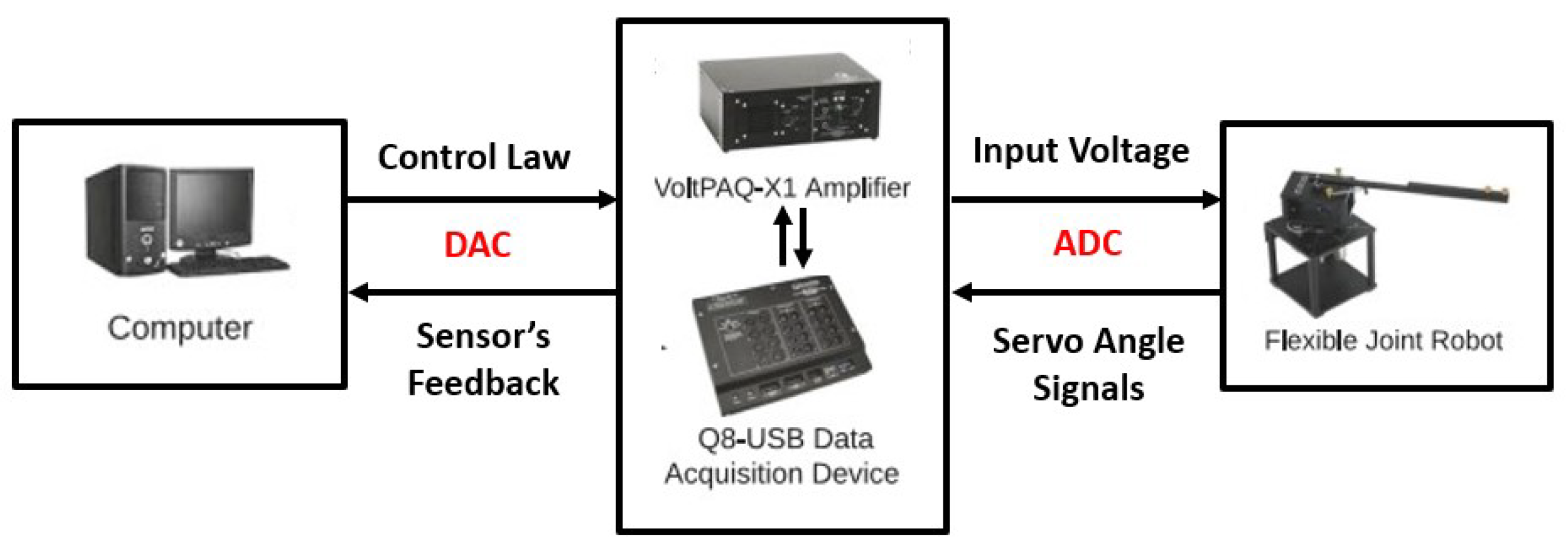
In this paper, the Quanser-developed RFJ robot is employed to assess the efficacy of AFIMC. The RFJ module, depicted in Figure 10, comprises a DC servo motor, a solid link, two encoders, two springs, two high-gear reducers, and an aluminum body. The manipulator’s nonlinearity and flexibility are demonstrated by the two springs attached to the arm. The servo motor, which is equipped with a gearbox, is mounted inside an aluminum frame. The gearbox generates the driving torque transmitted to the upper segment, encompassing the solid link and aluminum chassis, through the internal and external gears. Furthermore, the encoder placed on the motor shaft is utilized to read the position angle, . Meanwhile, the second encoder, positioned at the joint’s extremity, provides the measurement of the joint’s deflection angle, . These encoders have 4096 pulses per revolution. The experiment is run with a sample interval of s.
Figure 11 illustrates the complete setup for the RFJ system’s experimentation, outlining the comprehensive functioning of the system. Within this setup, the Q8-USB Data Acquisition Device fulfills the roles of digital-to-analog conversion (DAC) and analog-to-digital conversion (ADC). Processing of the deflection angle and motor angle data from both encoders is carried out by the VoltPAQ-X4 amplifier [37]. Additionally, control schemes are developed utilizing MATLAB/Simulink and Quanser programs on the computer.
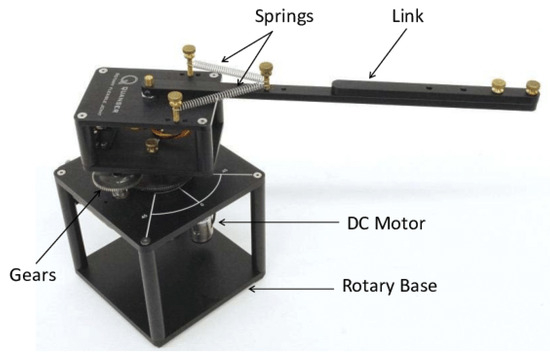
Figure 10.
Rotary Flexible Joint (RFJ) robot [38].
Figure 10.
Rotary Flexible Joint (RFJ) robot [38].
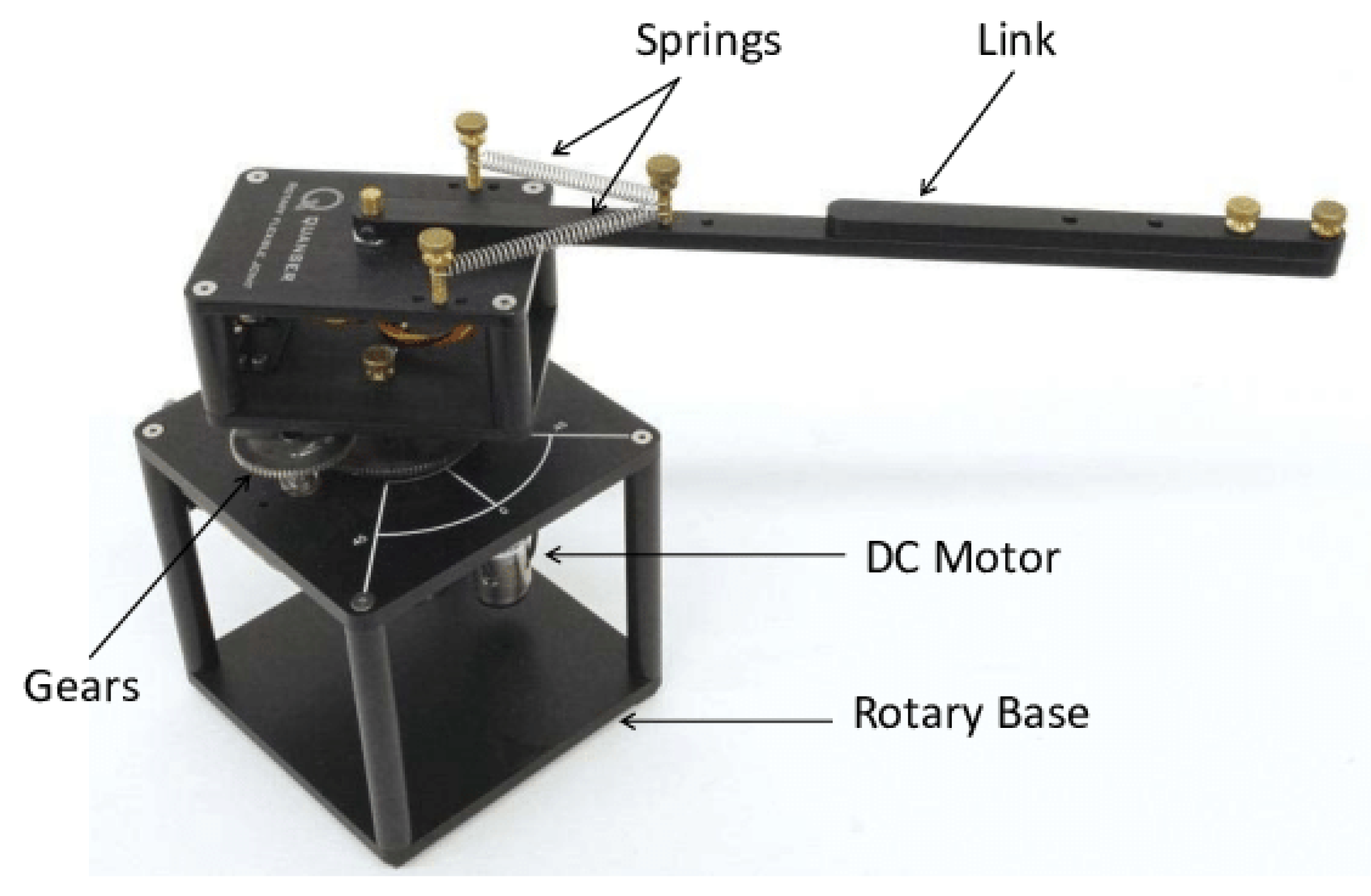
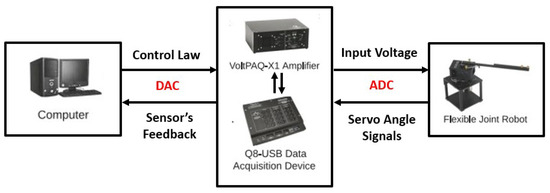
Figure 11.
Full setup of RFJ robot.
Figure 11.
Full setup of RFJ robot.
6.2. Experimental Results
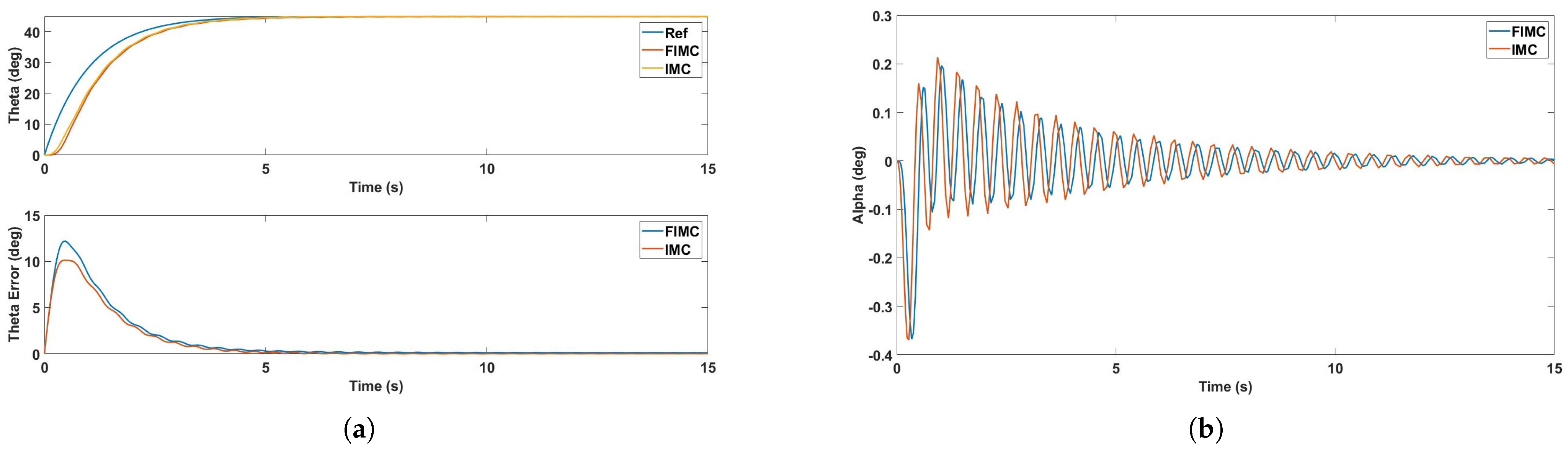
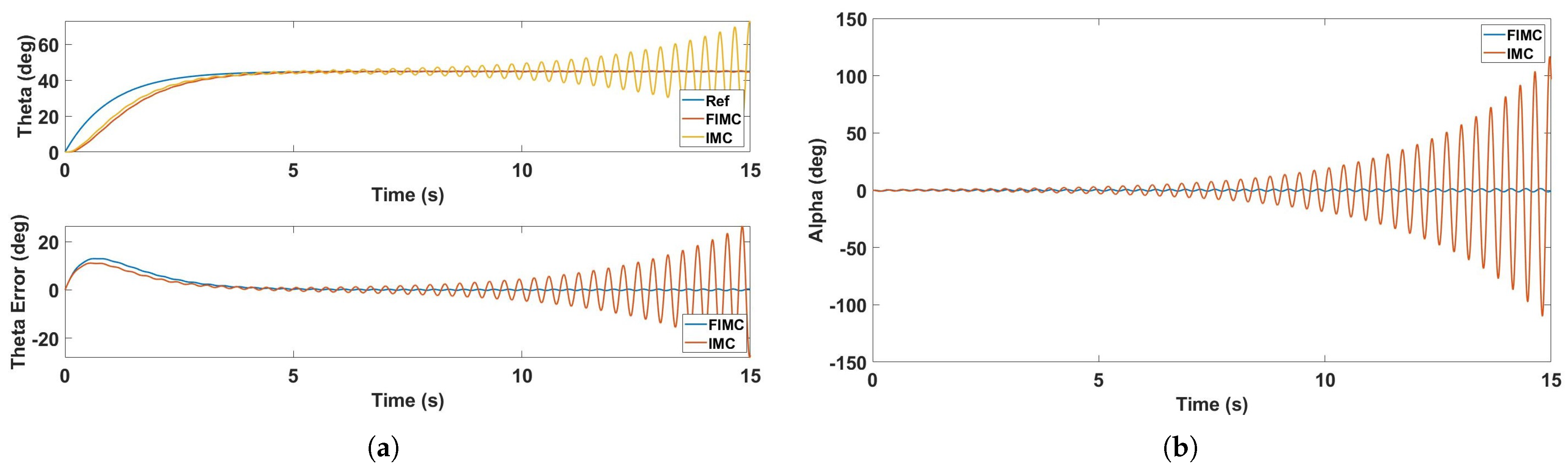
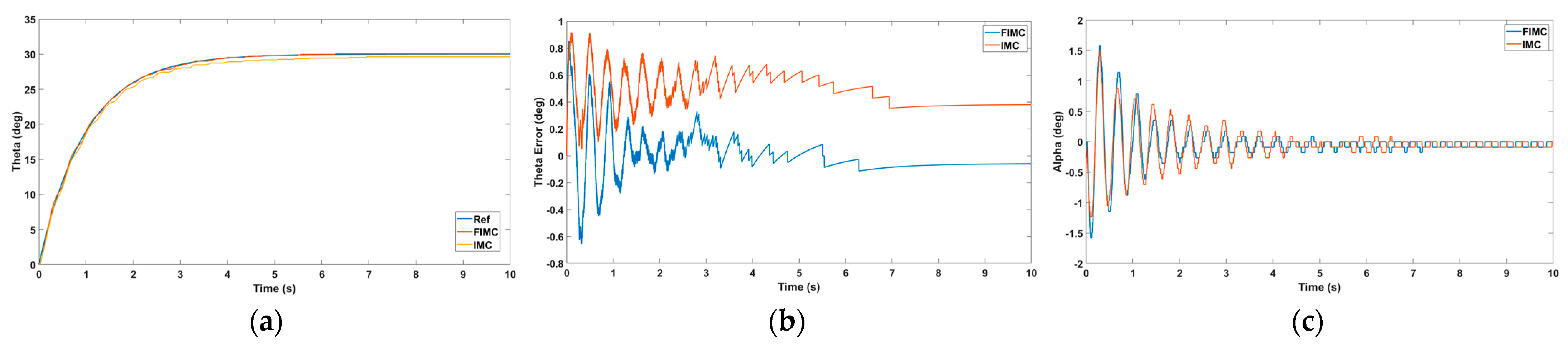
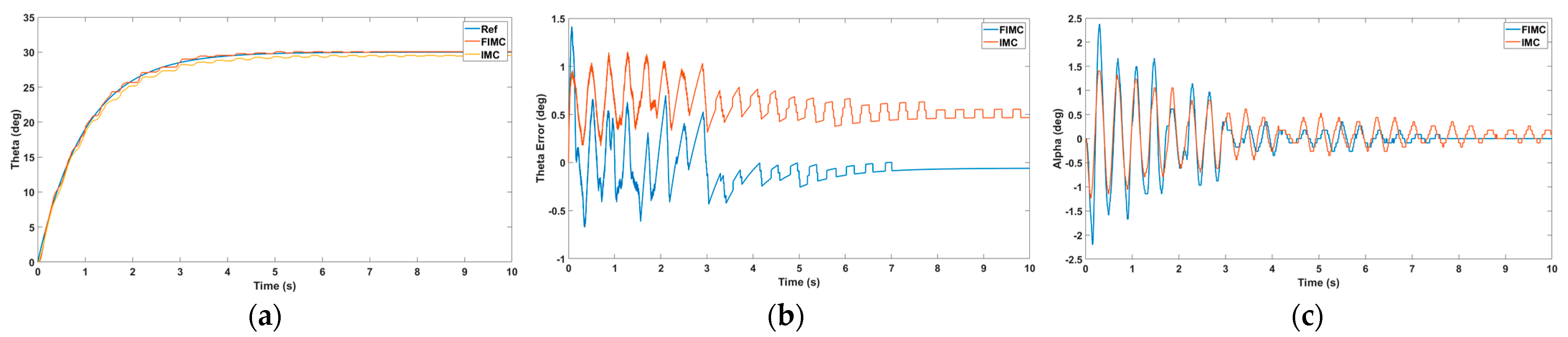
The purpose of this section is to showcase the outcomes of experiments, illustrating the efficiency of the proposed method in effectively handling situations involving imprecise measurements, uncertainties, and external disruptions. The experiments were conducted considering the four cases outlined above in the simulation section. In the experiment tests, the desired angle, , is assumed to be a smooth step signal with an amplitude equal to 45°.
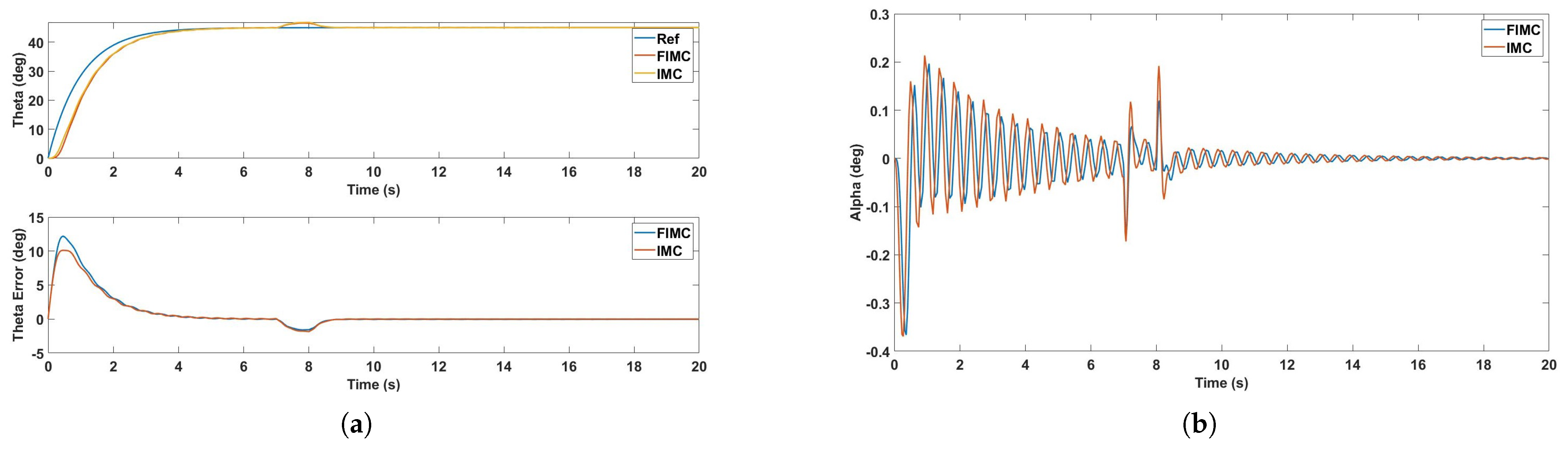
In Figure 12, the tracking performance of both controllers is displayed under disturbance-free conditions. The obtained responses reveal that both controllers are capable of effectively minimizing vibrations, described by the deflection angle, . However, it can be seen from the figure that the proposed AFIMC has less steady-state error as compared with IMC, and it has better tracking capabilities for . The impact of an impulse disturbance applied at time s is illustrated in Figure 13. This was achieved by adding an impulse signal at time t = 7 s to the force/torque signal sent to the motor of the RFJ. These disturbances were designed to mimic real-world scenarios, such as sudden impacts or sustained forces, to test the robustness of AFIMC. Results obtained indicate that both controllers successfully rejected the disturbance and resumed tracking of the reference input. Nevertheless, AFIMC exhibited a lesser impact from the disturbance with less error.
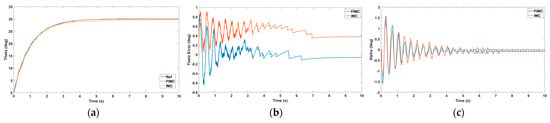
Figure 12.
IMC vs. AFIMC tracking control in the absence of a disturbance: (a) tracking, (b) error, (c) tracking.
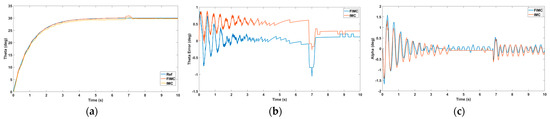
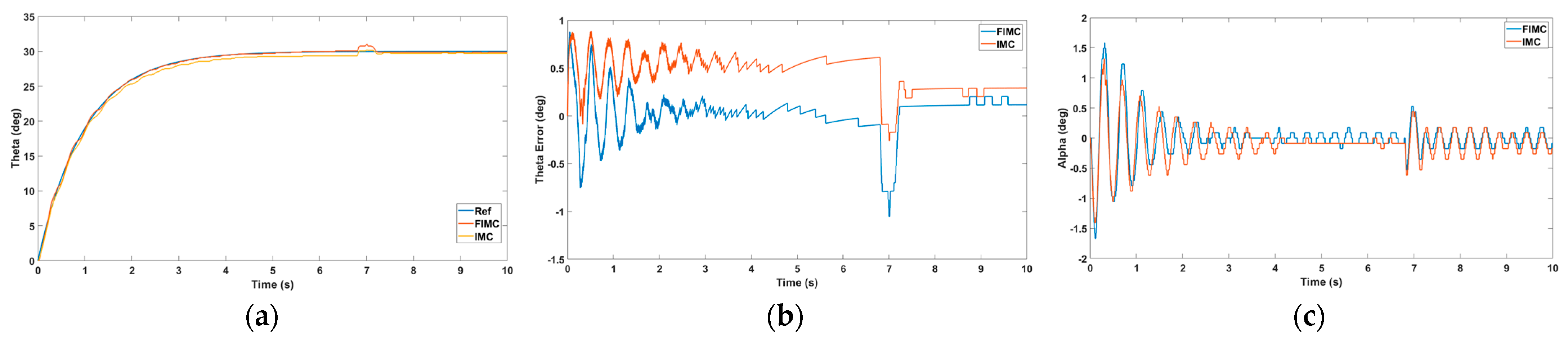
Figure 13.
IMC vs. AFIMC tracking control in the presence of an impulse disturbance applied at t = 7 s: (a) tracking, (b) error, (c) tracking.
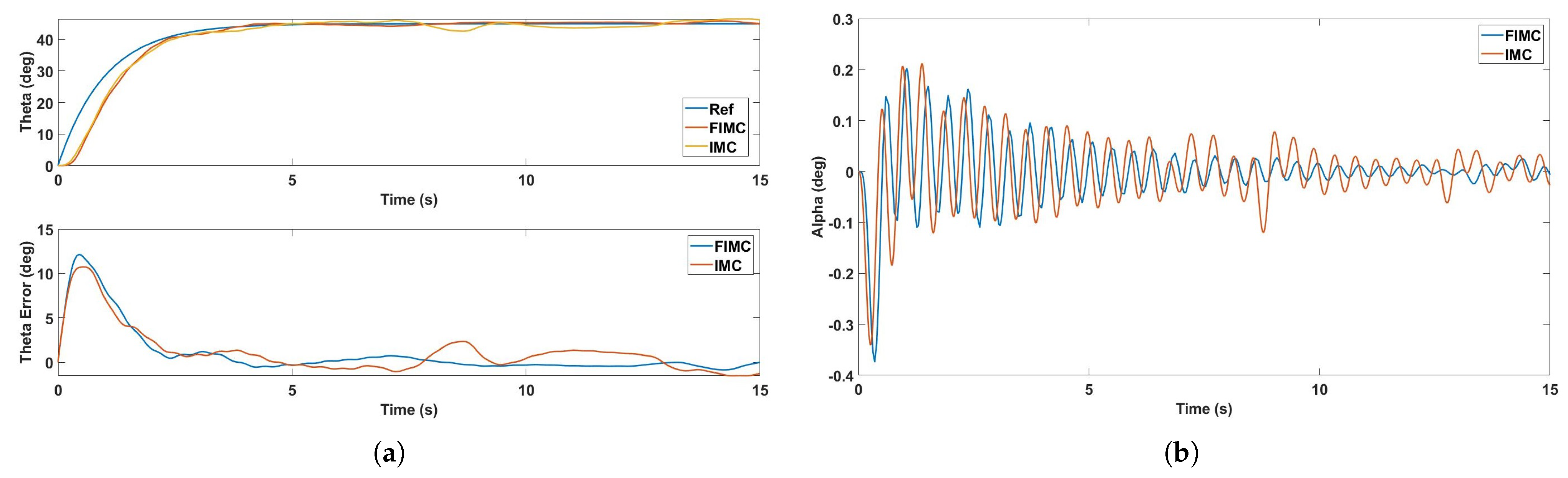
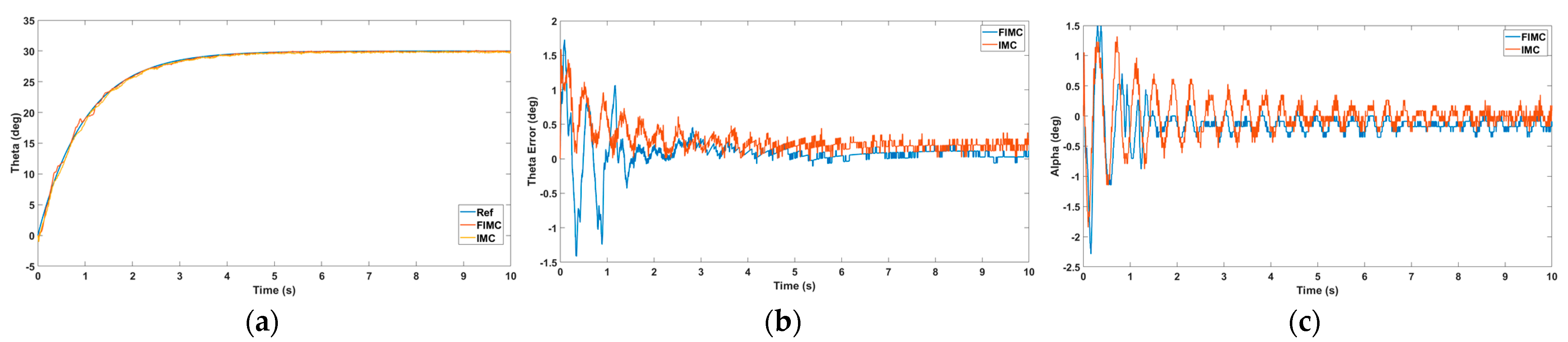
Similar to the simulation tests above, a uniform random noise was added to the output of the RFJ plant to obtain a clear observation of how effectively each controller could handle and mitigate the impact of the added noise in a real-world setting. The added uniform random noise has a power within a range from 0 to 0.01. The experimental results of this case are shown in Figure 14. The noise in the motor angle and deflection angle measurements made conventional IMC unable to track the desired trajectory with high accuracy, where the control action was over-correcting the system in a continuous loop, attempting to stabilize it, leading to oscillatory behavior. However, AFIMC exhibited superior noise immunity by effectively maintaining good tracking and minimizing vibrations in the joint. This fact makes AFIMC outperform conventional IMC in this particular application.
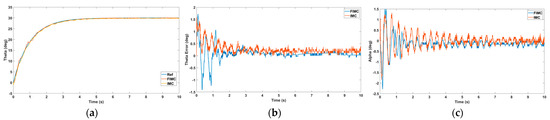
Figure 14.
IMC vs. AFIMC tracking control in the presence of a uniform random noise disturbance: (a) tracking, (b) error, (c) tracking.
To test the capability of both controllers to deal with plant uncertainties (case 4 outlined above), a parameter variation was performed. This was done by altering the value of the stiffness, . Experimental results obtained for both controllers are presented in Figure 15. Figure 15c demonstrates that the vibrations present in the transient phase are higher when using AFIMC since the fuzzy controller takes some time to adapt to the variation induced. However, AFIMC was able to reduce it significantly and provide good tracking with small errors. Because AFIMC, with its adaptive nature, is designed to handle parameter variations and uncertain operating conditions more effectively, it can continuously adjust its parameters based on the latest process information. This fact makes AFIMC exhibit better robustness and maintain satisfactory control performance in the presence of significant parameter variations, as mentioned in the simulation section above.
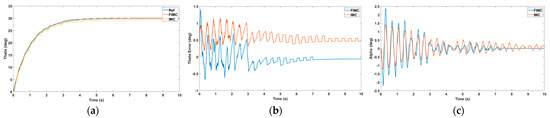
Figure 15.
IMC vs. AFIMC tracking control in the presence of a parameter variation: (a) tracking, (b) error, (c) tracking.
7. Conclusions
This paper introduces and evaluates two strategies: AFIMC and conventional IMC approaches. Mamdani methodology was utilized in designing the FLCs, employing twenty-five linguistic rules alongside trapezoidal and triangular MFs for both inputs and outputs of the system. The tracking performance of both AFIMC and IMC was analyzed in scenarios with and without plant disturbances and uncertainties. The proposed AFIMC improves the control of RFJ robots by combining the strengths of fuzzy logic and IMC. The experimental and simulation results confirm that AFIMC offers superior performance in tracking the desired trajectory and reducing oscillations, even in the presence of disturbances and modeling mismatches. This advancement addresses the limitations of fixed parameter IMC controllers, offering a more adaptable and effective solution for the control of under-actuated and nonlinear robotic systems. When disturbances and uncertainties were absent, the responses of both controllers closely resembled each other. Unlike the first case, when subjected to an impulse disturbance, AFIMC outperformed traditional IMC by effectively rejecting the disturbance and recovering the reference input faster, with fewer steady-state errors. Moreover, the superiority of AFIMC became more pronounced with increasing plant–model mismatch, as discussed in cases 3 and 4. In these cases, white noise and parameter variations were considered to validate the robustness of AFIMC under high plant–model mismatch conditions. In summary, the auto-tuning technique based on fuzzy rules for the IMC controller offers a solution to enhance control performance and robustness. The continuous variation of the tuning parameter based on the latest process conditions allows the controller to adapt and improve its response accordingly. Future work may focus on further refining the adaptive mechanisms, and other adaptive tuning methods could be applied to auto-tune the controller parameters, such as Recursive Neural Networks (RNNs), Iterative Learning Control (ILC), and neuro-fuzzy.
Author Contributions
O.M.G., R.F. and S.K. conceptualized the study. R.F. and M.B. developed the methodology. O.M.G. wrote the software and handled visualization. Validation was carried out by O.M.G., R.F. and S.K., R.F. performed the formal analysis and supervised the project. O.M.G. and R.F. investigated and curated the data. Original draft preparation was carried out by O.M.G. and R.F., with review and editing by R.F. and S.K., M.B. and M.H.R. provided resources and acquired funding. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Fareh, R. Sliding mode fractional order control for a single flexible link manipulator. Int. J. Mech. Eng. Rob. Res. 2019, 8, 228–232. [Google Scholar] [CrossRef]
- Gad, O.M.; Stihi, S.; Khadraoui, S.; Fareh, R.; Bettayeb, M. Tracking Control of a Rotary Flexible Joint using Fractional PID with a prescribed performance function. In Proceedings of the 2023 International Conference on Fractional Differentiation and Its Applications (ICFDA), Ajman, United Arab Emirates, 14–16 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Kiang, C.T.; Spowage, A.; Yoong, C.K. Review of control and sensor system of flexible manipulator. J. Intell. Robot. Syst. 2015, 77, 187–213. [Google Scholar] [CrossRef]
- Krafes, S.; Chalh, Z.; Saka, A. A review on the control of second order underactuated mechanical systems. Complexity 2018, 2018, 9573514. [Google Scholar] [CrossRef]
- Jayaswal, K.; Palwalia, D.; Kumar, S. Analysis of robust control method for the flexible manipulator in reliable operation of medical robots during COVID-19 pandemic. Microsyst. Technol. 2021, 27, 2103–2116. [Google Scholar] [CrossRef] [PubMed]
- Shalini, R.; Kumaravel, A. Production harmonized reconfiguration of flexible robots and machinery using manufacturing industry 4.0. J. Comput. Theor. Nanosci. 2018, 15, 3558–3564. [Google Scholar] [CrossRef]
- Shen, J.; Zhang, W.; Ye, Y.; Zhu, Y.; Ye, X. Adaptive Neural Network Control of Space Flexible Robot Based on Calculated Torque for Non-cooperative Targets. IAENG Int. J. Comput. Sci. 2023, 50, 525–536. [Google Scholar]
- Liu, P.; Huda, M.N.; Sun, L.; Yu, H. A survey on underactuated robotic systems: Bio-inspiration, trajectory planning and control. Mechatronics 2020, 72, 102443. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, H. A survey of underactuated mechanical systems. IET Control Theory Appl. 2013, 7, 921–935. [Google Scholar] [CrossRef]
- Gupta, S.; Kumar, A. A brief review of dynamics and control of underactuated biped robots. Adv. Robot. 2017, 31, 607–623. [Google Scholar] [CrossRef]
- Kumar, N.; Ohri, J. Novel m-PSO Optimized LQR Control Design for Flexible Link Manipulator: An Experimental Validation. Majlesi J. Electr. Eng. 2020, 14, 81–92. [Google Scholar]
- Ahmad, M.A.; Ishak, H.; Nasir, A.N.K.; Abd Ghani, N. Data-based PID control of flexible joint robot using adaptive safe experimentation dynamics algorithm. Bull. Electr. Eng. Inform. 2021, 10, 79–85. [Google Scholar] [CrossRef]
- Pradhan, S.K.; Subudhi, B. Position control of a flexible manipulator using a new nonlinear self-tuning PID controller. IEEE/CAA J. Autom. Sin. 2020, 7, 136–149. [Google Scholar] [CrossRef]
- Dharavath, P.K.; Ohri, J. Optimized Control Design of LQR for Flexible Joint Manipulator. In Latest Trends in Renewable Energy Technologies; Springer: Berlin/Heidelberg, Germany, 2021; pp. 261–269. [Google Scholar]
- Abdel-Nasser, M.; Saif, A.W.A. LQR Optimal Controller Design for One and Two-Link Flexible-Joint Robot Manipulator. Comput. Ind. Eng. 2023, 3, 1266–1275. [Google Scholar]
- Wei, Y.S.; Wang, J.F.; Wang, J.X.; Xu, Q.Y.; Lloret, J. Iteration dependent interval based open-closed-loop iterative learning control for time varying systems with vector relative degree. CAAI Trans. Intell. Technol. 2023, 8, 645–660. [Google Scholar] [CrossRef]
- Gad, O.; Fareh, R.; Khadraoui, S.; Bettayeb, M. Tracking control of a rotary flexible joint robot: A comparative study. In Proceedings of the 3rd International Conference on Distributed Sensing and Intelligent Systems (ICDSIS 2022), Sharjah, United Arab Emirates, 19–21 October 2022; IET: Stevenage, UK, 2022; Volume 2022, pp. 309–313. [Google Scholar]
- Li, Z.; Li, S. Recursive recurrent neural network: A novel model for manipulator control with different levels of physical constraints. CAAI Trans. Intell. Technol. 2023, 8, 622–634. [Google Scholar] [CrossRef]
- Fareh, R.; Saad, M.; Saad, M. Distributed control strategy for flexible link manipulators. Robotica 2015, 33, 768–786. [Google Scholar] [CrossRef]
- Raouf, F.; Mohamad, S.; Maarouf, S.; Maamar, B. Distributed adaptive control strategy for flexible link manipulators. Robotica 2017, 35, 1562–1584. [Google Scholar] [CrossRef]
- Raouf, F.; Mohamad, S.; Maarouf, S. Workspace tracking control of two-flexible-link manipulator using distributed control strategy. J. Control. Sci. Eng. 2013, 2013, 617465. [Google Scholar] [CrossRef]
- Nath, U.M.; Dey, C.; Mudi, R.K. Fuzzy-based adaptive IMC-PI controller for real-time application on a level control loop. Adv. Intell. Syst. Comput. 2017, 515, 387–395. [Google Scholar] [CrossRef]
- Khanvilkar, S.; Jadhav, S.P.; Vyawahare, V.; Kadam, V. Comparative study of Fuzzy and IMC based controllers for heat exchanger system. In Proceedings of the 2016 International Conference on Automatic Control and Dynamic Optimization Techniques (ICACDOT), Pune, India, 9–10 September 2016; pp. 344–348. [Google Scholar] [CrossRef]
- Nath, U.M.; Dey, C.; Mudi, R.K. Designing of Fuzzy rule based switching mechanism for IMC controller for temperature controlling process. Procedia Comput. Sci. 2020, 167, 1363–1369. [Google Scholar] [CrossRef]
- Chang, W.; Li, Y.; Tong, S. Adaptive Fuzzy Backstepping Tracking Control for Flexible Robotic Manipulator. IEEE/CAA J. Autom. Sin. 2021, 8, 1923–1930. [Google Scholar] [CrossRef]
- Ling, S.; Wang, H.; Liu, P.X. Adaptive fuzzy dynamic surface control of flexible-joint robot systems with input saturation. IEEE/CAA J. Autom. Sin. 2019, 6, 97–107. [Google Scholar] [CrossRef]
- Aljohani, A.J.; Mehedi, I.M.; Bilal, M.; Mahmoud, M.; Meem, R.J.; Iskanderani, A.I.; Alam, M.M.; Alasmary, W. Rotary Flexible Joint Control Using Adaptive Fuzzy Sliding Mode Scheme. Comput. Intell. Neurosci. 2022, 2022, 2613075. [Google Scholar] [CrossRef] [PubMed]
- Handout, Q.S. Rotary Flexible Joint Module; Quanser: Markham, ON, Canada, 2011. [Google Scholar]
- Mezzi, A.; Soudani, D. Internal Model Control: Application to a class of linear underactuated systems with two degrees of underactuation. In Proceedings of the 2017 International Conference on Advanced Systems and Electric Technologies (IC_ASET), Hammamet, Tunisia, 14–17 January 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Jin, Q.; Jiang, B.; Wang, Q.; Shan, G. Decoupling internal model control for non-square processes based on equivalent transfer function. Trans. Inst. Meas. Control 2014, 36, 1114–1131. [Google Scholar] [CrossRef]
- Pandey, S.K.; Dey, J.; Banerjee, S. Modified Internal Model Control for Cart Inverted Pendulum System. In Proceedings of the 2021 IEEE 4th International Conference on Computing, Power and Communication Technologies (GUCON), Kuala Lumpur, Malaysia, 24–26 September 2021; IEEE: New York, NY, USA, 2021; pp. 1–5. [Google Scholar]
- Saxena, S.; Hote, Y.V. Advances in internal model control technique: A review and future prospects. IETE Tech. Rev. 2012, 29, 461–472. [Google Scholar] [CrossRef]
- Saidi, I.; Touati, N.; Dhahri, A.; Soudani, D. A comparative study on existing and new methods to design internal model controllers for non-square systems. Trans. Inst. Meas. Control 2019, 41, 3637–3650. [Google Scholar] [CrossRef]
- Klir, G.; Yuan, B. Fuzzy Sets and Fuzzy Logic; Prentice Hall: Hoboken, NJ, USA, 1995; Volume 4. [Google Scholar]
- Garcia, C.E.; Morari, M. Internal model control. A unifying review and some new results. Ind. Eng. Chem. Process. Des. Dev. 1982, 21, 308–323. [Google Scholar] [CrossRef]
- Nath, U.M.; Dey, C.; Mudi, R.K. Review on IMC-based PID controller design approach with experimental validations. IETE J. Res. 2023, 69, 1640–1660. [Google Scholar] [CrossRef]
- Rsetam, K. Cascaded Extended State Observer Based Full Order Sliding Mode Control Strategies for Underactuated Flexible Joint Robots. Ph.D. Thesis, Swinburne University of Technology, Hawthorn Australia, 2020. [Google Scholar]
- Alam, W.; Ali, N.; Aziz, H.M.W.; Iqbal, J. Control of flexible joint robotic manipulator: Design and prototyping. In Proceedings of the 2018 International Conference on Electrical Engineering (ICEE), Lahore, Pakistan, 15–16 February 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).