
Trajectory Tracking Control of Mobile Manipulator Based on Improved Sliding Mode Control Algorithm

Abstract
:1. Introduction
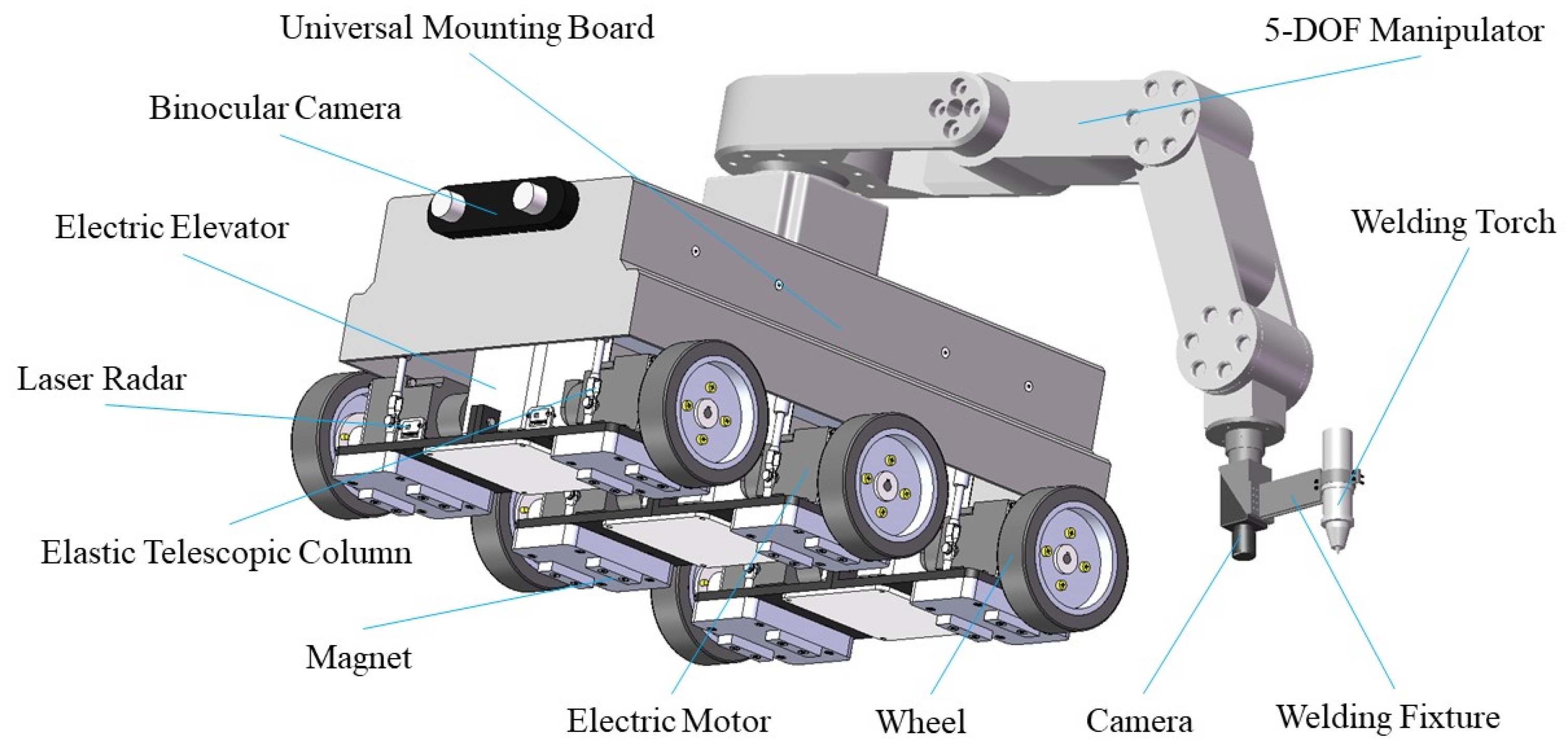
- Designing a novel robot structure featuring a hybrid wheel-leg mobile platform, a non-contact variable magnetic adhesion mechanism, and a more flexible 5-DOF manipulator. This configuration endows the robot with enhanced operational capabilities, meeting the requirements of a wide range of tasks.
- A novel adaptive SMC strategy based on the kinematic model is proposed for the mobile platform. By introducing a novel reaching law, the controller is designed considering the unknown distance from the center of mass, and the stability is proved by the Lyapunov function.
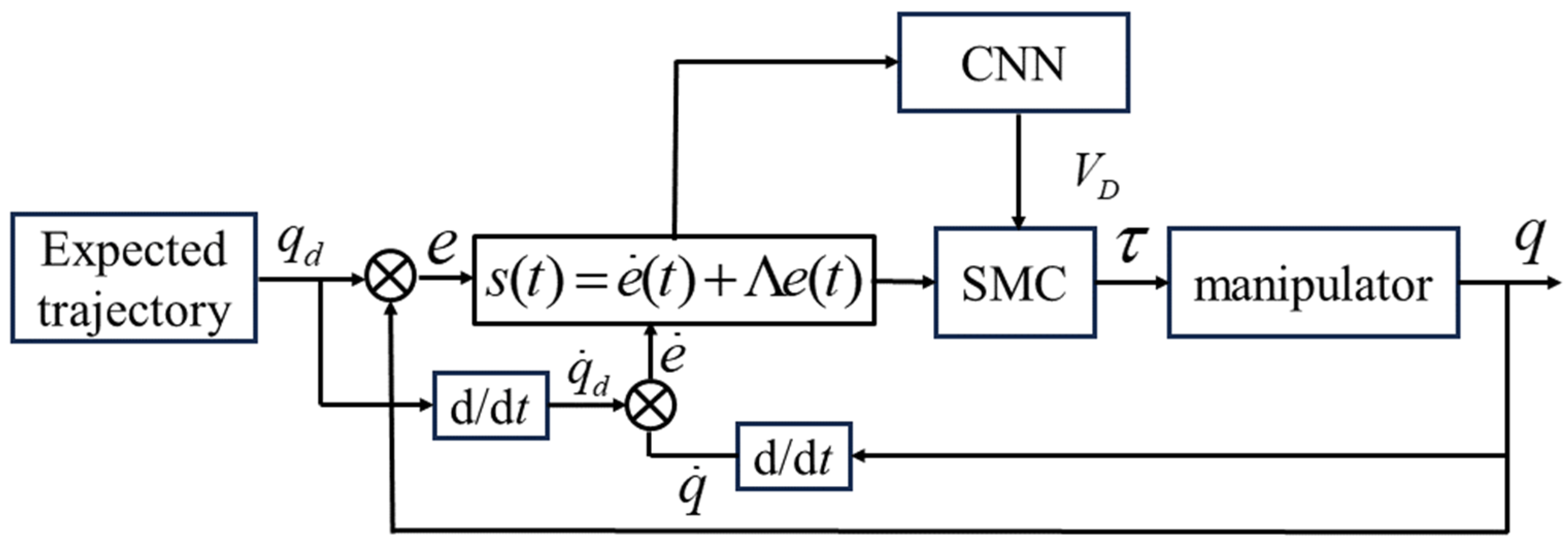
- Introducing a control method for the trajectory tracking of the manipulator using a combination of a neural network and SMC. Initially, the dynamic model of the manipulator is analyzed, and the uncertain components are extracted. Subsequently, a CNN is designed to compensate for these uncertainties. The compensation terms are then incorporated into the SMC, enabling improved trajectory tracking through the refined SMC approach.
2. Robot Design
2.1. Design Requirements
- (1)
- Reliable load capacity. Due to the need to carry complex welding equipment for welding operations, to ensure flexible operation on different curvature walls, the robot needs to have sufficient load capacity while overcoming its own gravity.
- (2)
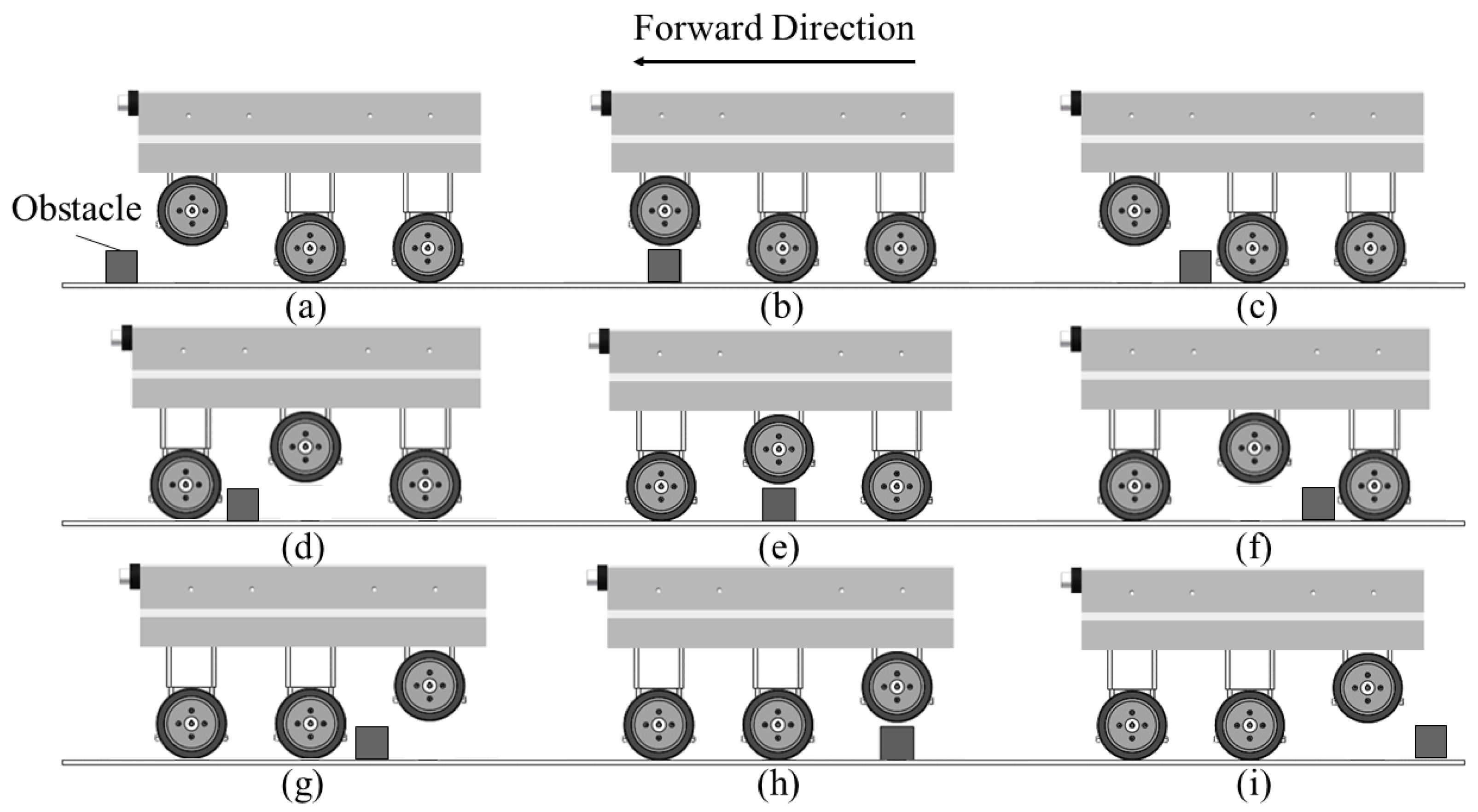
- Smooth obstacle-crossing ability. There are many obstacles on the working surface, such as sinews, welds, and grooves, and the robot needs to adapt to the environment and cross the inevitable obstacles in the process of movement.
- (3)
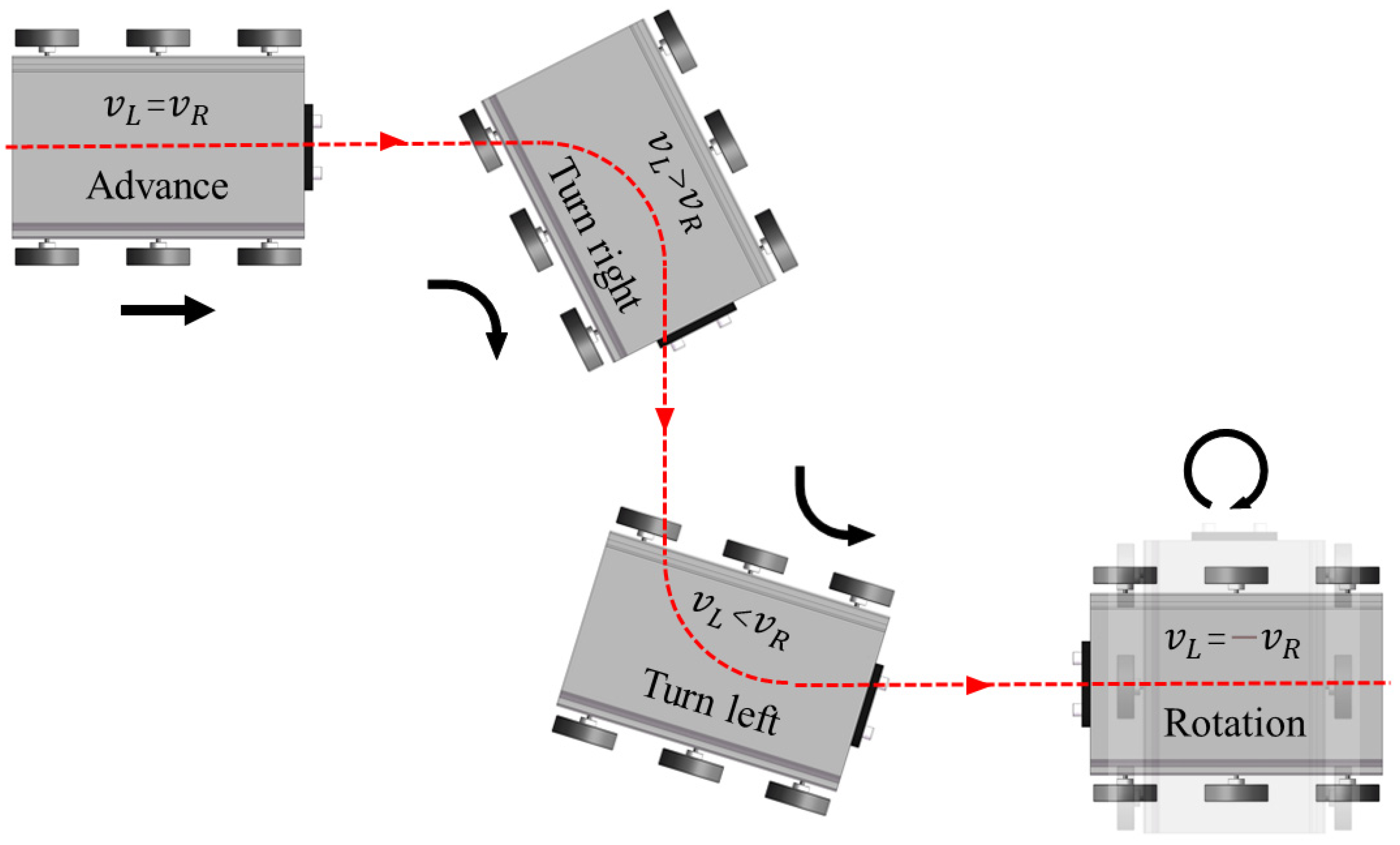
- Good control performance. In the process of operation, the robot needs to achieve wall climbing, obstacle crossing, movement or turning, and other functions and needs to realize welding operations through the robot arm. It is necessary to design a reliable control method while meeting the requirements of robot movement flexibility and safety.
2.2. Mechanical Structure and Working Principle
3. Controller Design of the Robot
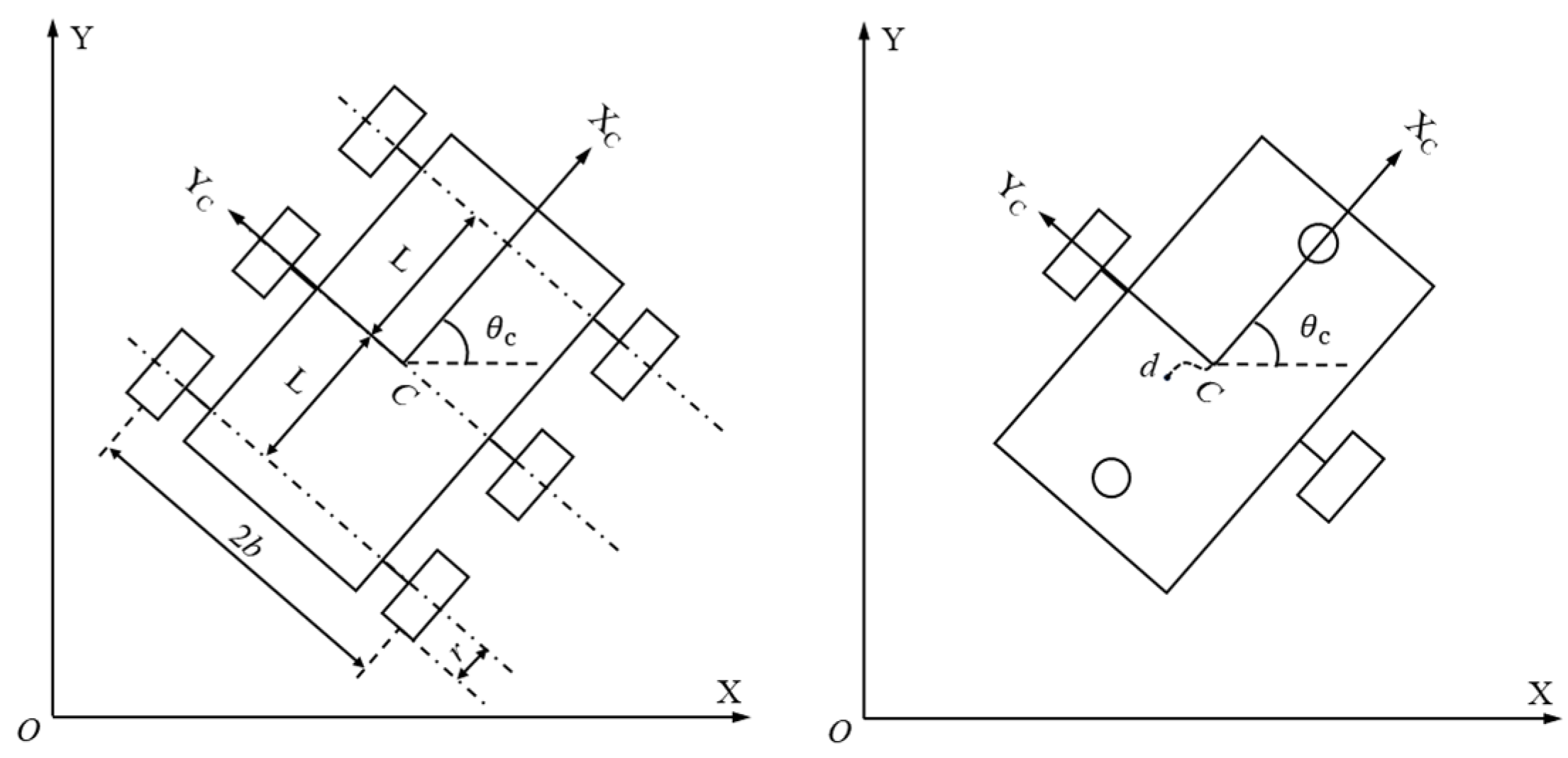
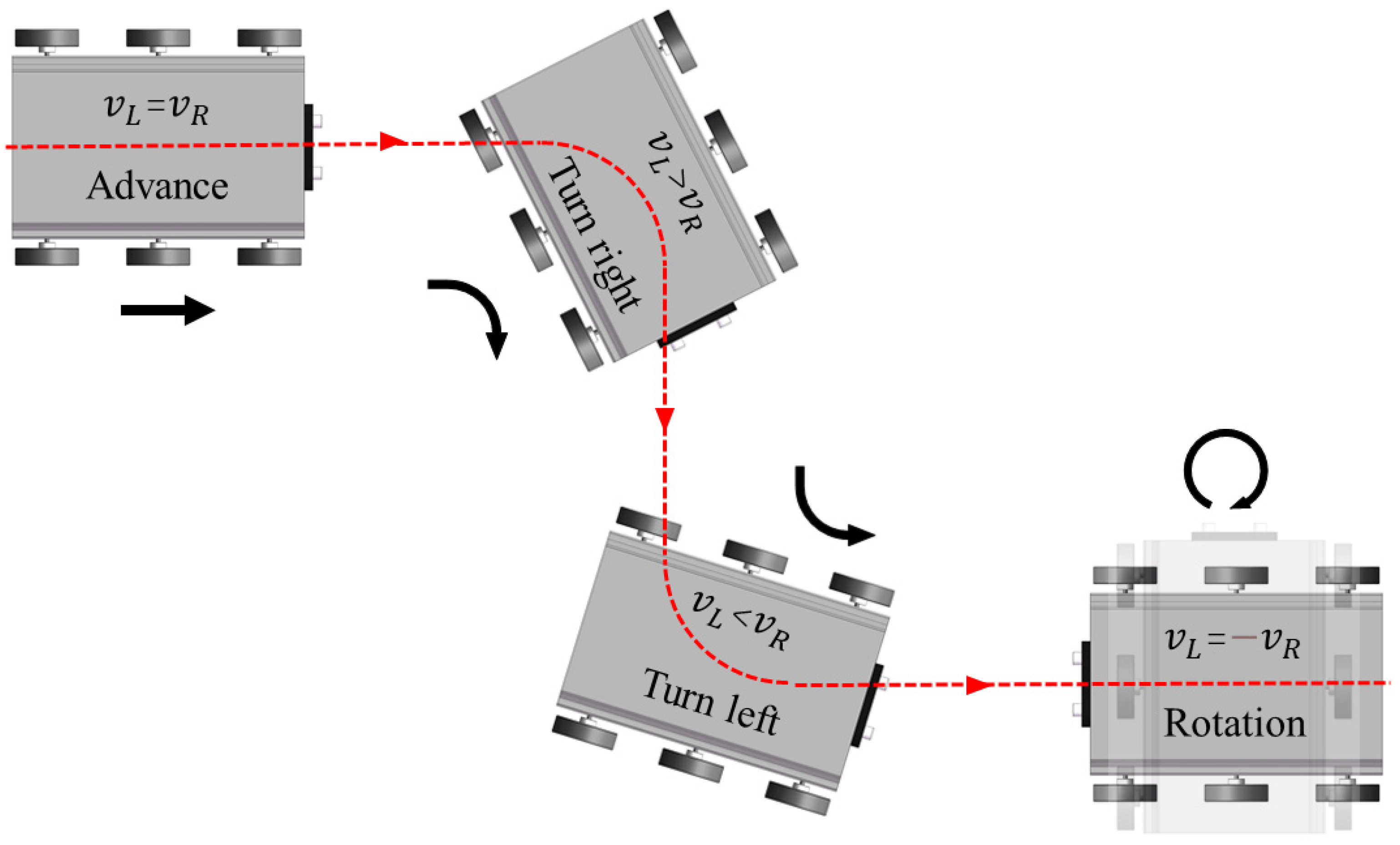
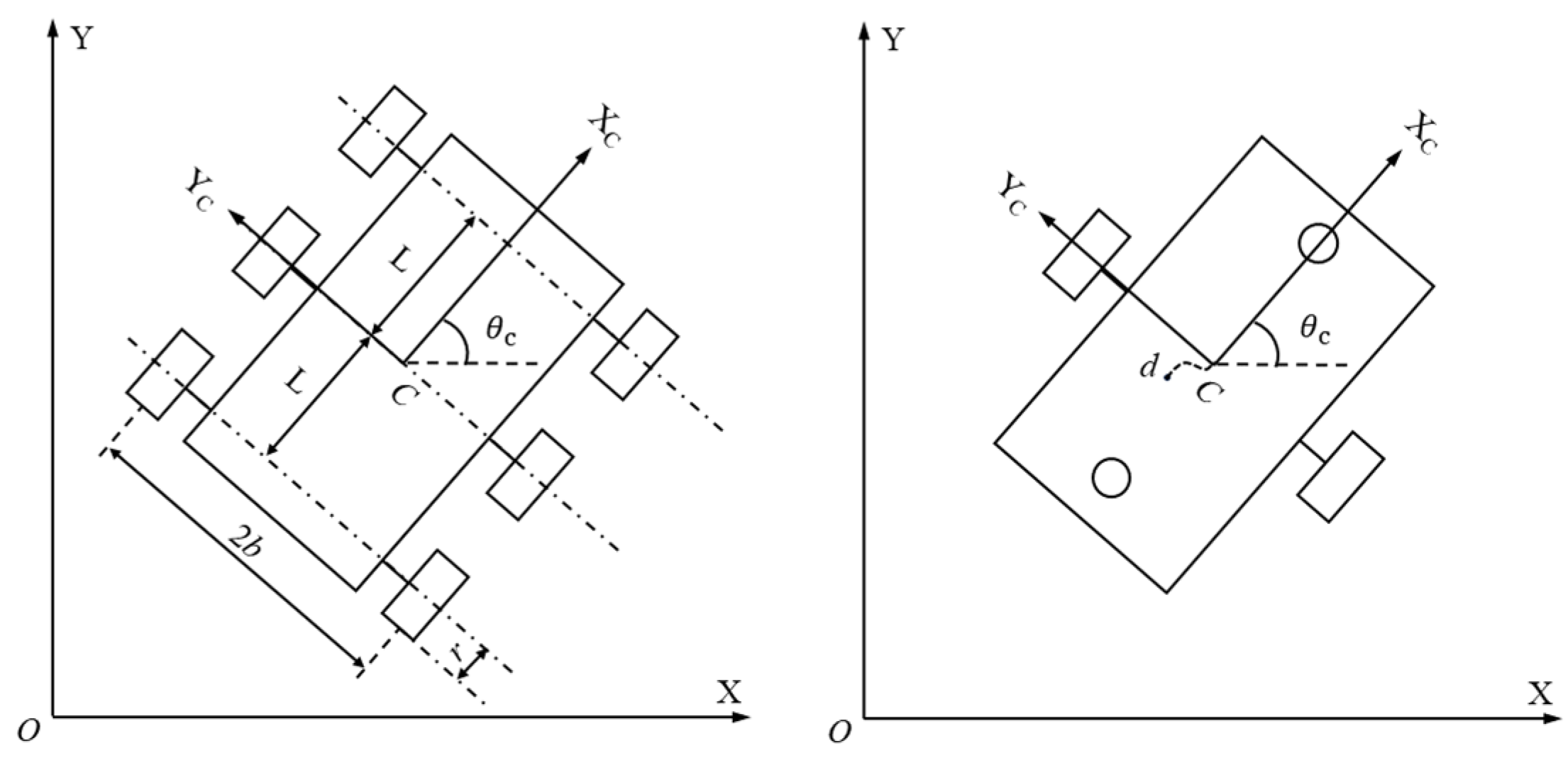
3.1. Kinematics Analysis of Mobile Platform
3.2. Controller Design of Mobile Platform
3.3. Dynamics Analysis of the Manipulator
3.4. Construction of the CNN
3.5. Controller Design of the Manipulator
4. Simulation Analysis and Experiment
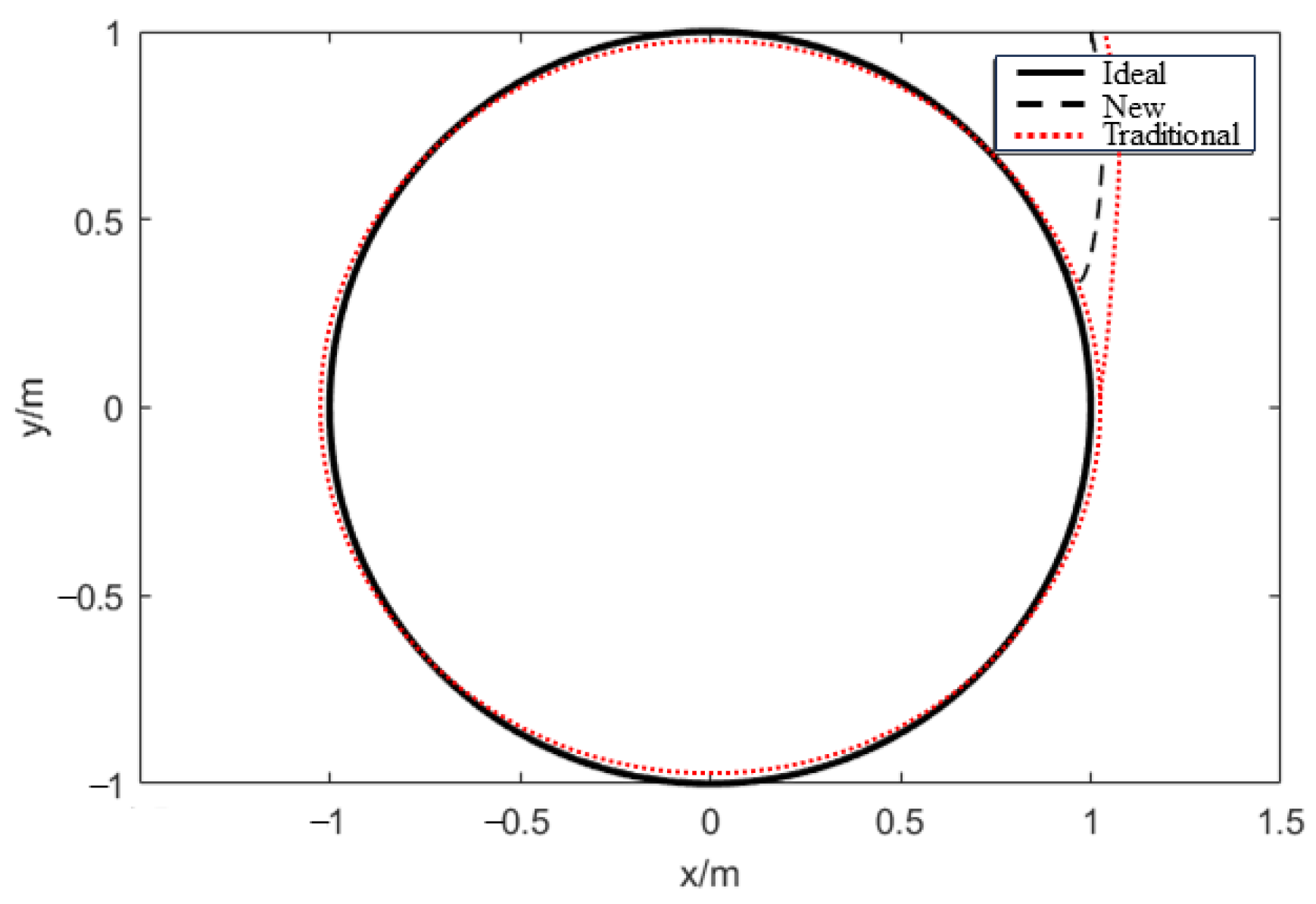
4.1. Simulation Analysis of Mobile Platform
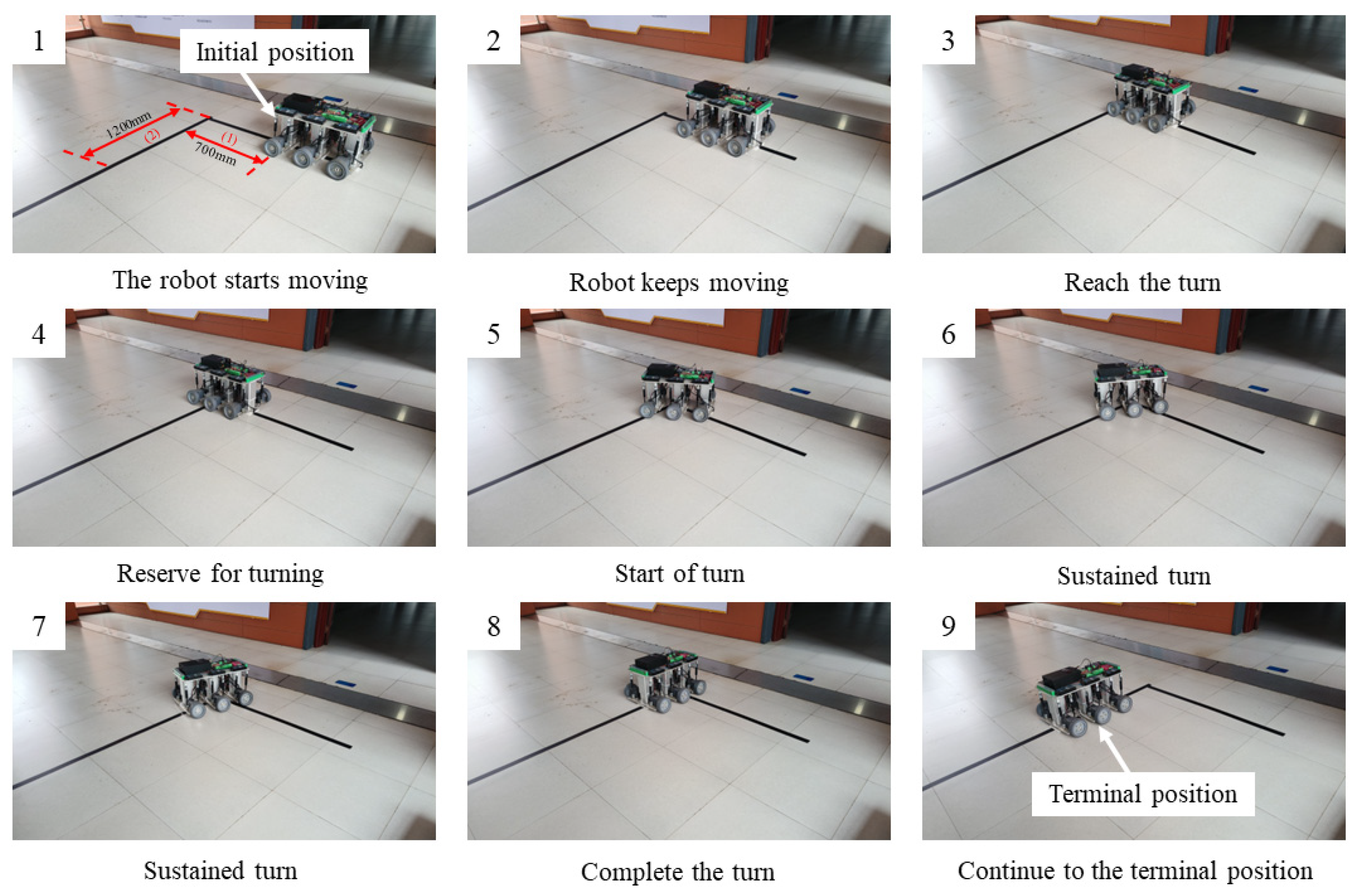
4.2. Mobile Platform Trajectory Tracking Experiment
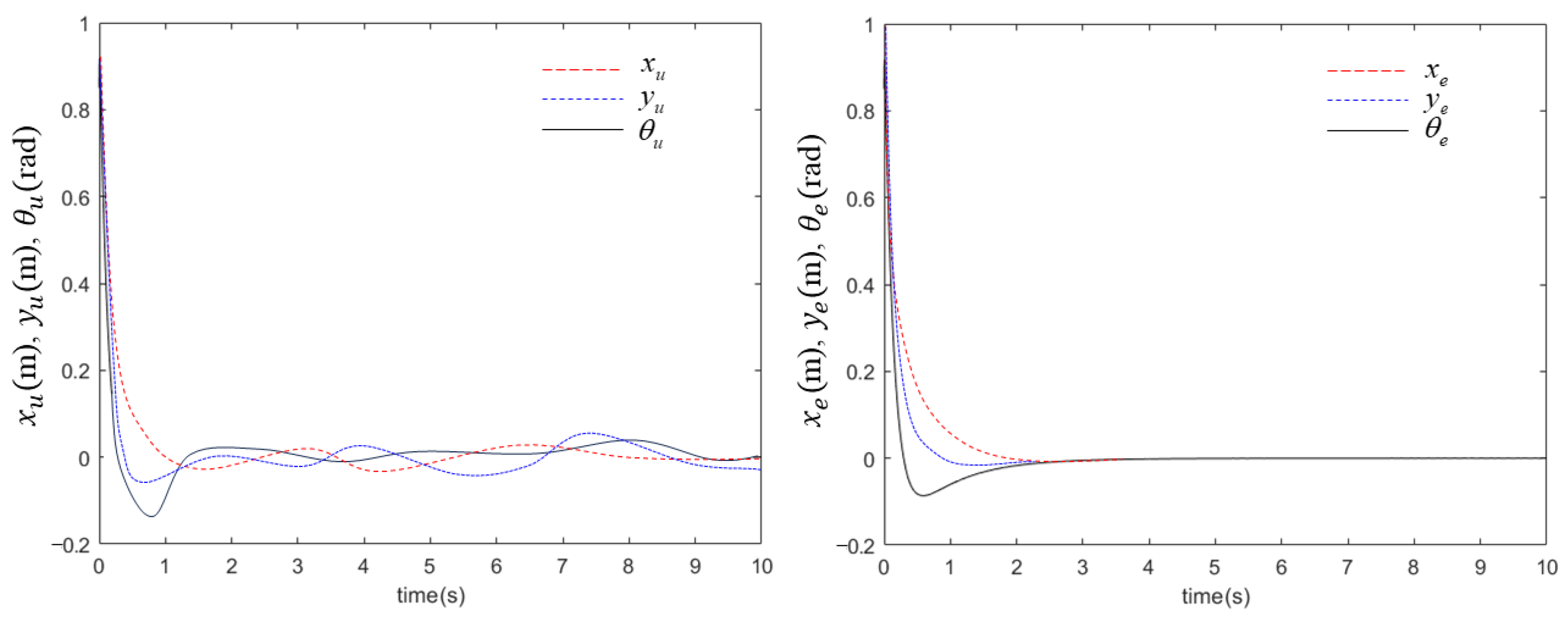
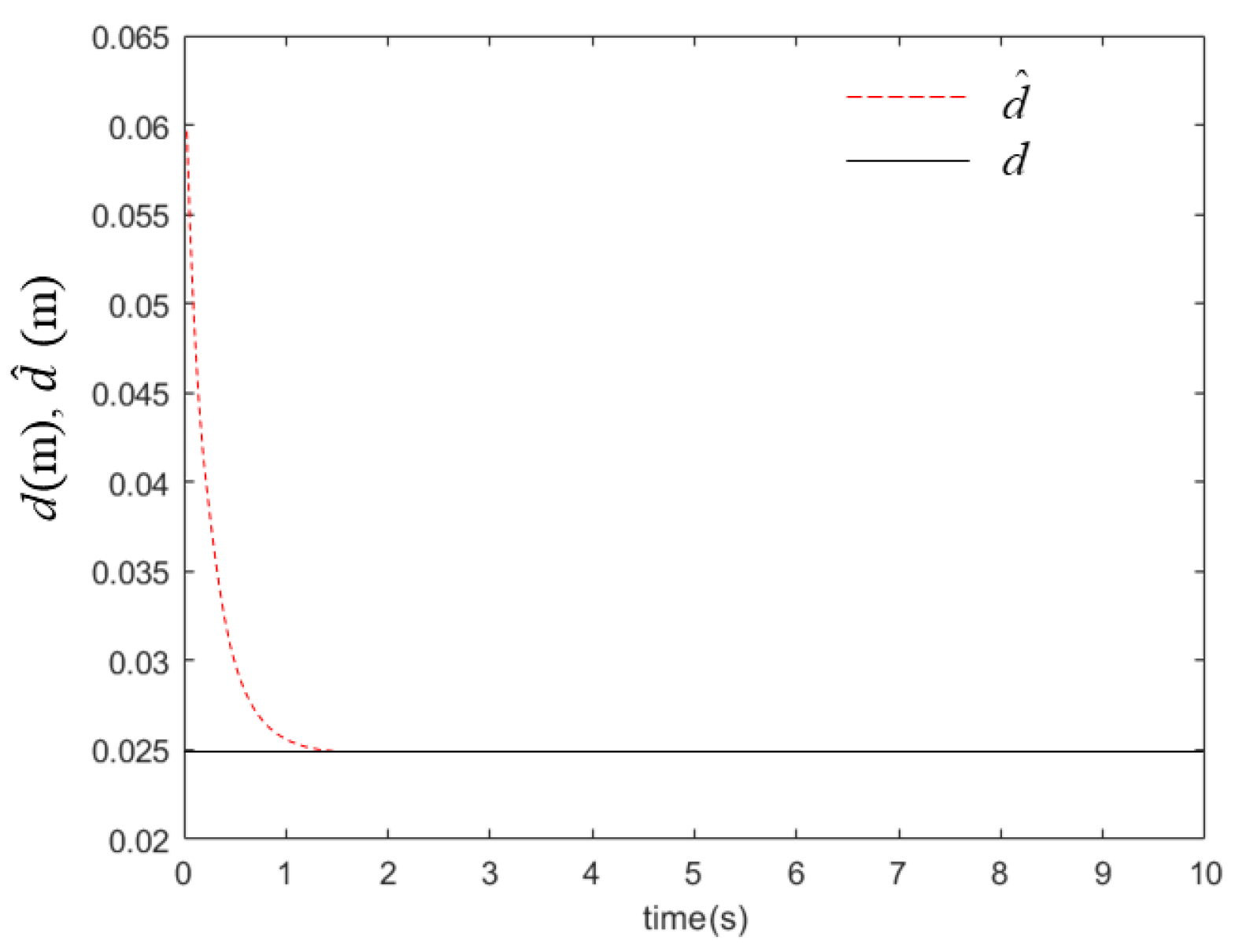
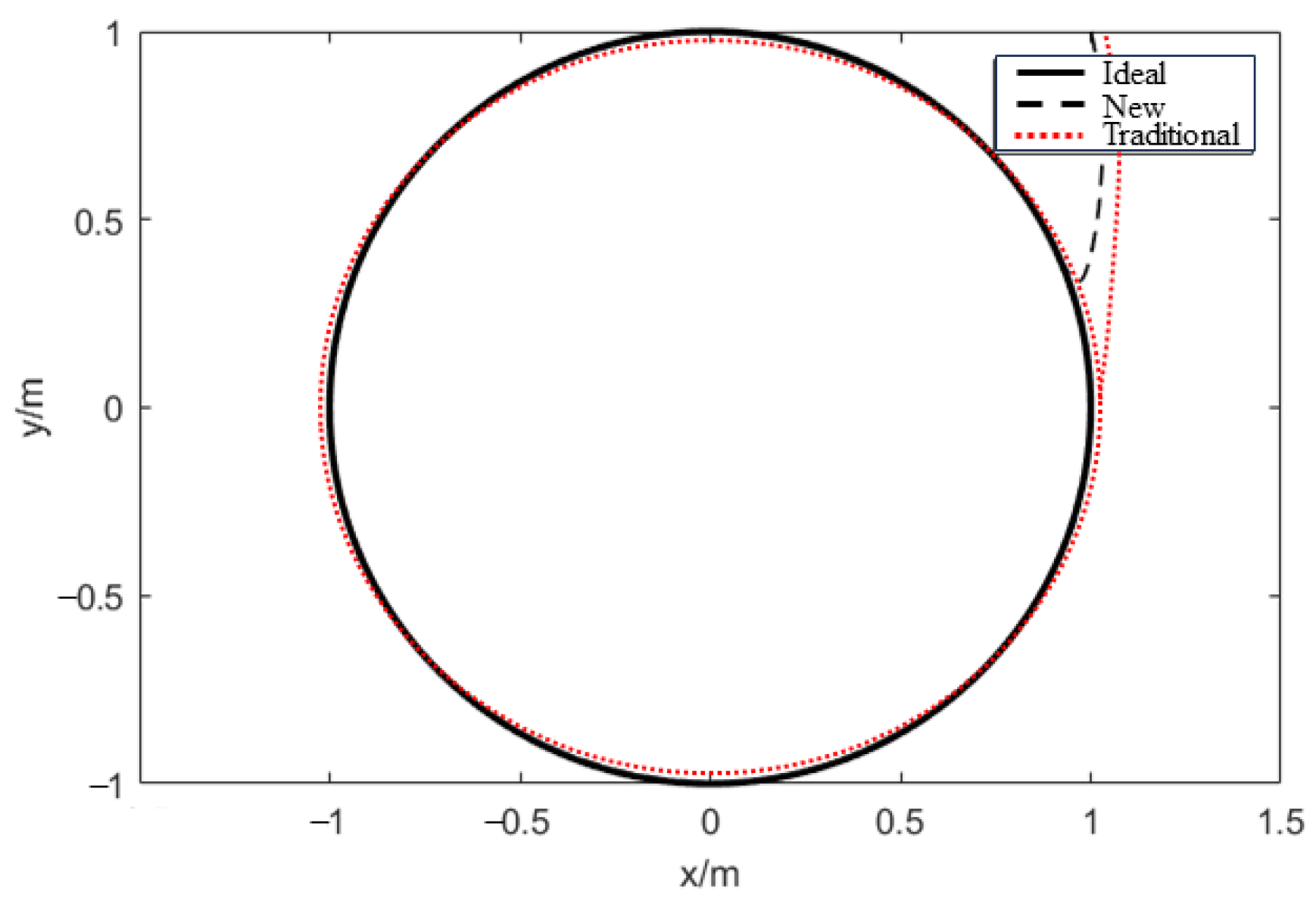
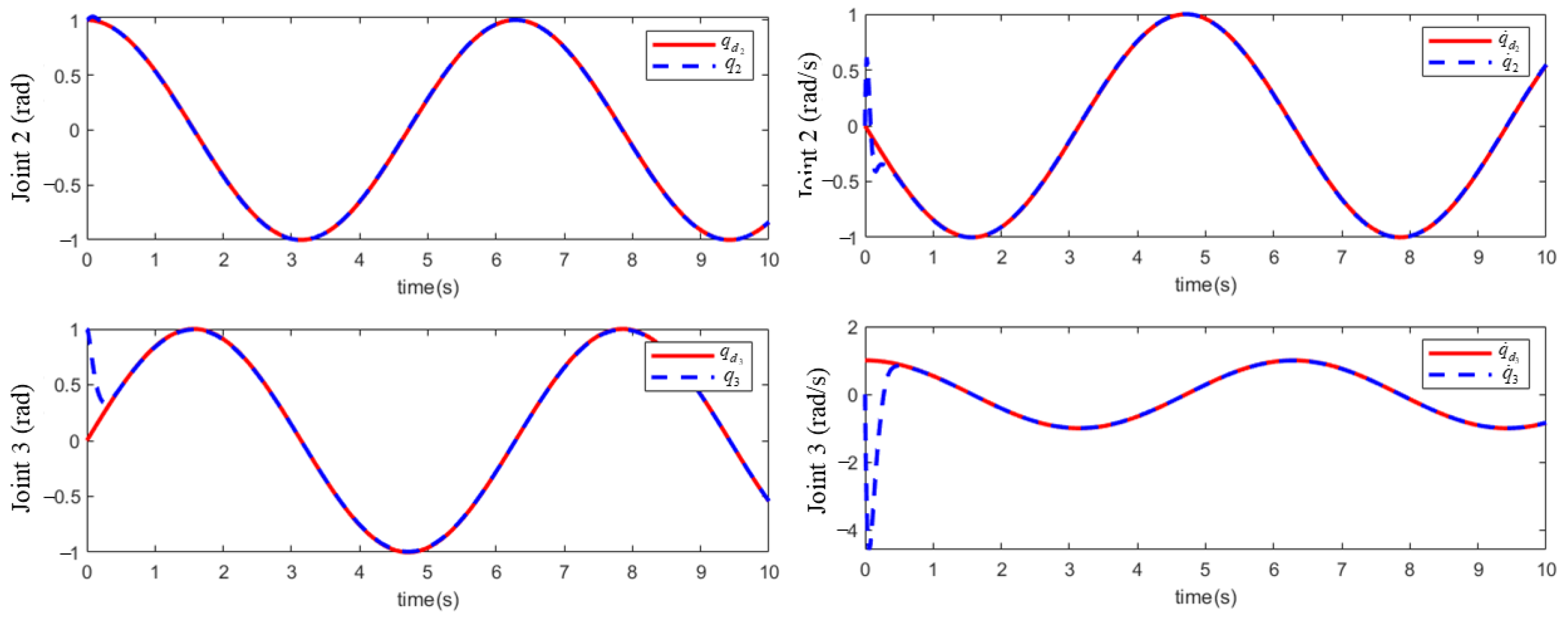
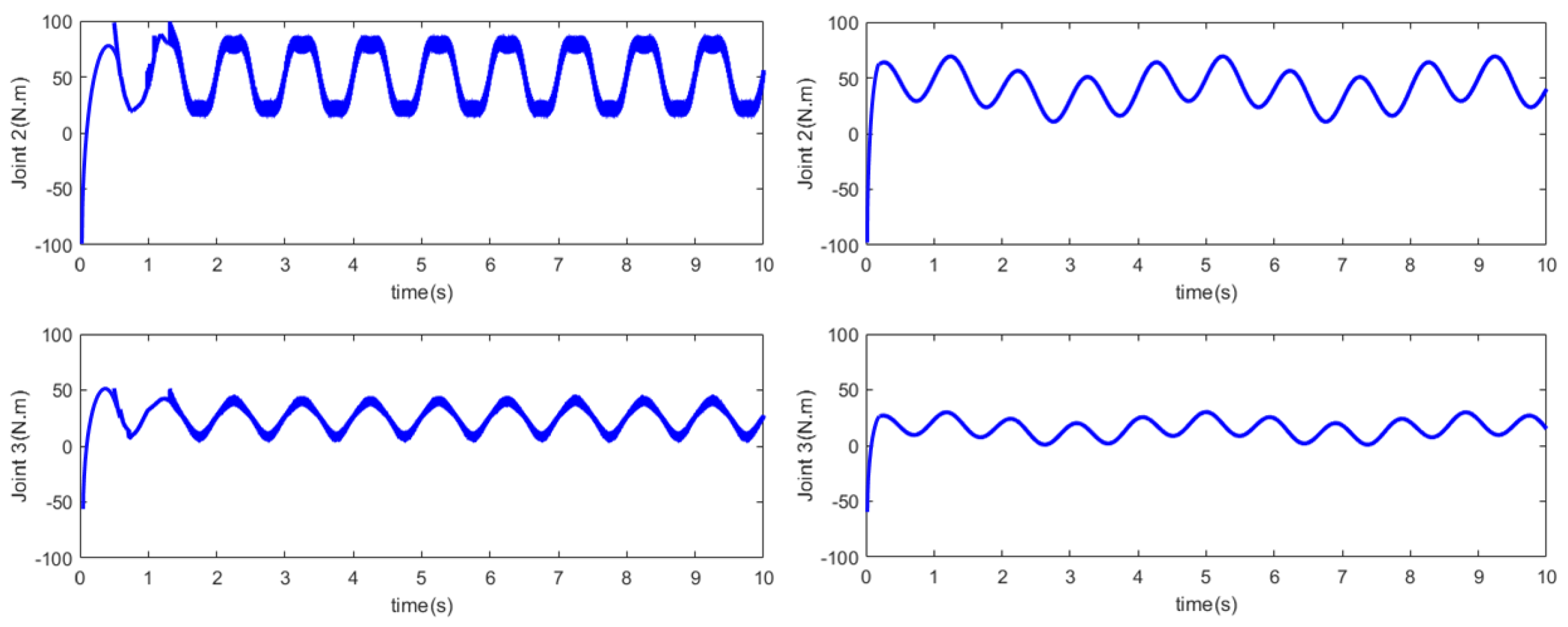
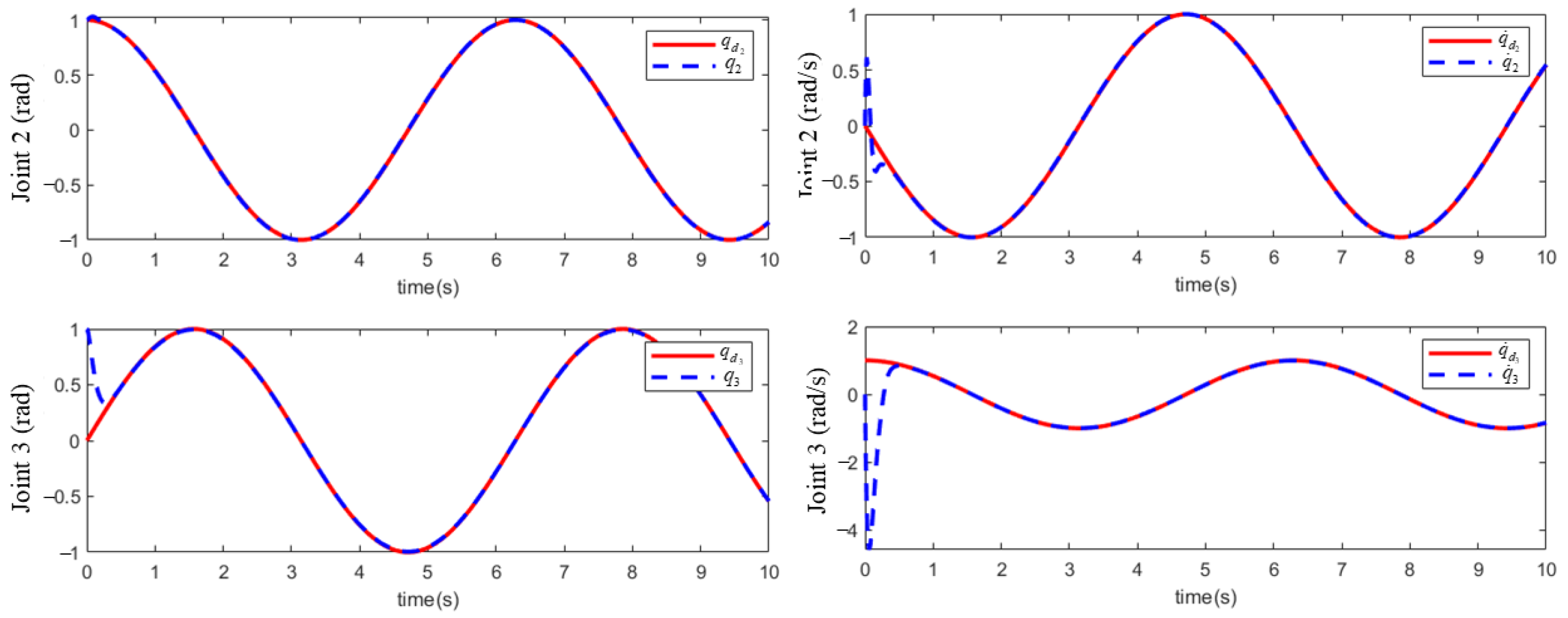
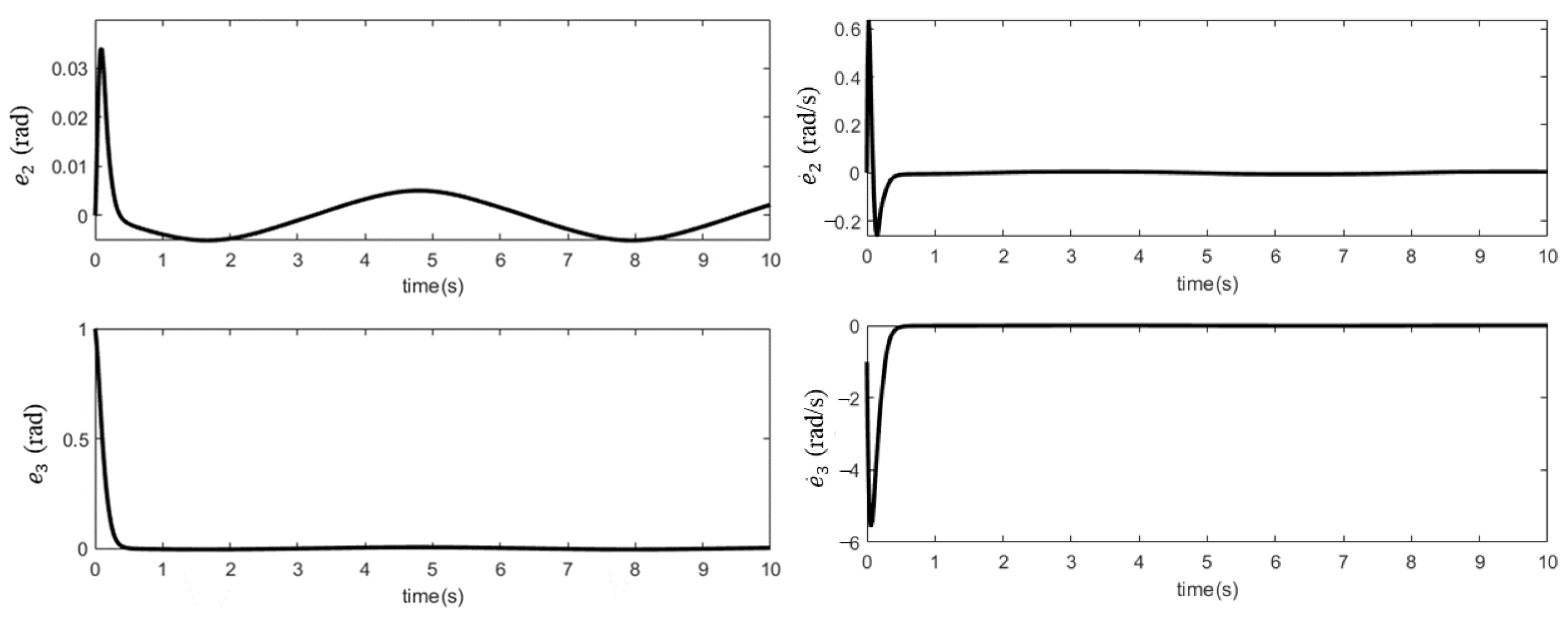
4.3. Simulation Analysis of Manipulator
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Seungwoo, H.; Yong, U.; Jaejun, P.; HaeWon, P. Agile and versatile climbing on ferromagnetic surfaces with a quadrupedal robot. Sci. Robot. 2022, 7, eadd1017. [Google Scholar]
- Yang, P.; Sun, L.; Zhang, M. Design and analysis of a passive adaptive wall-climbing robot on variable curvature ship facades. Appl. Ocean Res. 2024, 143, 103879. [Google Scholar] [CrossRef]
- Wang, T.; Xue, Z.L.; Dong, X.Q.; Xie, S.L. Autonomous intelligent planning method for welding path of complex ship components. Robotica 2020, 39, 428–437. [Google Scholar] [CrossRef]
- Feng, X.B.; Tian, W.; Wei, R.; Pan, B.W.; Chen, Y. Application of a wall-climbing, welding robot in ship automatic welding. J. Coast. Res. 2020, 106, 609–613. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhao, Z.; Chen, B.; Li, Y.C.; Zhao, Y.S.; Xu, Y.D. Design and analysis of a passive adaptive wall-climbing robot based on five-bar mechanisms. Ocean Eng. 2024, 298, 117140. [Google Scholar] [CrossRef]
- Abdulkader, R.E.; Veerajagadheswar, P.; Lin, N.H.; Kumaran, S.; Vishaal, S.R.; Mohan, R.E. Sparrow: A magnetic climbing robot for autonomous thickness measurement in ship hull maintenance. Mar. Sci. Eng. 2020, 8, 469. [Google Scholar] [CrossRef]
- Olivier, K. A magnetic climbing robot to perform autonomous welding in the shipbuilding industry. Robot. Comput. Integr. Manuf. 2018, 53, 178–186. [Google Scholar]
- Ye, D.; Shikun, L.; Xukun, R.; Chaofang, X.; Xinlei, N. Review of key technologies of climbing robots. Front. Mech. Eng. 2023, 18, 4. [Google Scholar]
- Nagano, K.; Fujimoto, Y. Simplification of motion, generation in the singular, configuration of a wheel-legged, mobile robot. IEEJ J. Ind. Appl. 2019, 8, 745–755. [Google Scholar] [CrossRef]
- Zhongcheng, G.; Yongjun, D.; Zhongxi, S.; Tangjie, X.; Yonglong, L.; Fan, Z.; Na, D.; Jiandong, W. Design and experimental verification of an intelligent wall-climbing welding robot system. Ind. Robot. 2014, 41, 6–507. [Google Scholar]
- Lee, D.; Seo, T.; Kim, J.W. Optimal design and workspace analysis of a mobile welding robot with a 3P3R serial manipulator. Robot. Auton. Syst. 2011, 59, 813–826. [Google Scholar] [CrossRef]
- Andaluz, V.; Roberti, F.; Toibero, J.M. Adaptive unified motion control of mobile manipulators. Control Eng. Pract. 2012, 20, 1337–1352. [Google Scholar] [CrossRef]
- Yu, C.; Kan, N.; Kawaguchi, T.; Hashimoto, S. Path following for autonomous mobile robots with deep reinforcement learning. Sensors 2024, 24, 561. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Shi, P.; Li, W.L.; Yue, X.K. Discrete nonsingular terminal sliding mode control for trajectory tracking of space manipulators with mismatched multiple disturbances and noisy measurements. Aerosp. Sci. Technol. 2024, 144, 108766. [Google Scholar] [CrossRef]
- Hsu, L.; Cunha, V.P.J.; Costa, R.R. Nyquist criterion for chattering avoidance and global stability in observer-based sliding-mode control with parasitics. J. Frankl. Inst. 2024, 361, 106658. [Google Scholar] [CrossRef]
- Jianing, Z.; Fujie, W.; Guilin, W. Sliding-mode control for teleoperation system with uncertain kinematics and dynamics: An observer-based approach. J. Frankl. Inst. 2023, 360, 8300–8319. [Google Scholar]
- Wang, S.; Jiang, C.; Tu, Q.; Zhu, C. Sliding mode control with an adaptive switching power reaching law. Sci. Rep. 2023, 13, 16155. [Google Scholar] [CrossRef]
- Sharaf, A.M.; Armghan, H.; Ali, N. Hybrid control of the DC microgrid using deep neural networks and global terminal sliding mode control with the exponential reaching law. Sensors 2023, 23, 9342. [Google Scholar] [CrossRef]
- Song, T.Z.; Fang, L.J.; Zang, Y.; Shen, H.S. Recursive terminal sliding mo-de based control of robot manipulators with a novel sliding mode disturbance observer. Nonlinear Dyn. 2023, 112, 1105–1121. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.J. A novel ANSMC algorithm for tracking control of 3-DOF planar parallel manipulators. Int. J. Mech. Eng. Robot. Res. 2023, 12, 32–39. [Google Scholar] [CrossRef]
- Vo, T.A.; Truong, N.T.; Kang, J.H. Fixed-Time RBFNN-based prescribed performance control for robot manipulators: Achieving global convergence and control performance improvement. Mathematics 2023, 11, 2307. [Google Scholar] [CrossRef]
- Yen, T.V.; Nan, Y.W.; Cuong, V.P. Robust adaptive sliding mode neural networks control for industrial robot manipulators. Int. J. Control Autom. Syst. 2019, 17, 783–792. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S. Adaptive fuzzy integral sliding-mode control for robust faul tolerant control of robot manipulators with disturbance observer. IEEE Trans. Fuzzy Syst. 2020, 29, 1284–1296. [Google Scholar] [CrossRef]
- Duan, J.G.; Zhang, H.Z.; Zhang, Q.L.; Qin, J.Y. Research on neural network terminal sliding mode control of robotic arms based on novel reaching law and improved salp swarm algorithm. Actuators 2023, 12, 464. [Google Scholar] [CrossRef]
- Liu, W.K.; Shu, F.; Xu, Y.L.; Ding, R.Z.; Yang, X.F.; Li, Z.; Liu, Y. Iterative learning based neural network sliding mode control for repetitive tasks: With application to a PMLSM with uncertainties and external disturbances. Mech. Syst. Signal Process. 2022, 172, 108950. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Tuan, A.V.; Hee-Jun, K. Neural network-based sliding mode controllers applied to robot manipulators: A review. Neurocomputing 2023, 562, 126896. [Google Scholar]
- Galarza, J.; Oraby, T. Functional data learning using convolutional neural network. Mach. Learn. Sci. Technol. 2024, 5, 015030. [Google Scholar] [CrossRef]
- Dai, Y.W.; Wu, Q.B.; Zhang, Y. Generalized sparse radial basis function networks for multi-classification problems. Appl. Soft Comput. 2024, 154, 111361. [Google Scholar] [CrossRef]
- Ying, K.; Yunliang, J.; Junwen, Z.; Huifeng, W. A time controlling neural network for time-varying QP solving with application to kinematics of mobile manipulators. Int. J. Intell. Syst. 2020, 36, 403–420. [Google Scholar]
- Bo, T.; Xingwei, Z.; Sijie, Y.; Han, D. Kinematic modeling and control of mobile robot for large-scale workpiece machining. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2020, 236, 29–38. [Google Scholar]
- Panahandeh, P.; Alipour, K.; Tarvirdizadeh, B.; Hadi, A. A kinematic Lyapunov-based controller to posture stabilization of wheeled mobile robots. Mech. Syst. Signal Process. 2019, 134, 106319. [Google Scholar] [CrossRef]
- Xu, Z.Z.; Cao, G.Z.; Huang, S.D.; Zheng, H.X. Sliding mode control of the planar switched reluctance motor for interference suppression. ICIEA 2016, 11, 2130–2134. [Google Scholar]
- Li, Z.; Ren, J. Adaptive event-triggered non-fragile sliding mode control for uncertain T-S fuzzy singular systems with passive constraint. Appl. Math. Comput. 2024, 472, 128629. [Google Scholar] [CrossRef]
- Chen, J.Q.; Zhang, H.Y.; Zhu, T.T.; Pan, S.T. Trajectory tracking control of a manipulator based on an immune algorithm-optimized neural network in the presence of unknown backlash-like hysteresis. Appl. Math. Comput. 2024, 470, 128552. [Google Scholar] [CrossRef]
- Ma, H.F.; Wu, J.F.; Xiong, Z.H. A Novel Exponential Reaching Law of Discrete-Time Sliding-Mode Control. IEEE Trans. Ind. Electron. 2017, 64, 3840–3850. [Google Scholar] [CrossRef]
- Yang, X.H.; Zhao, Z.Y.; Li, Y.T.; Yang, G.C.; Zhao, G.D.; Liu, H. Adaptive neural network control of manipulators with uncertain kinematics and dynamics. Eng. Appl. Artif. Intell. 2024, 133, 107935. [Google Scholar] [CrossRef]
- Hamed, N.R.; Abolfazl, Z.; Holger, V. Actor–critic learning based PID control for robotic manipulators. Appl. Soft Comput. 2024, 151, 111153. [Google Scholar]
- Zhou, M.H.; Feng, Y.; Xue, C.; Han, F.L. Deep convolutional neural network based fractional-order terminal sliding-mode control for robotic manipulators. Neurocomputing 2020, 416, 143–151. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Index | Value/Type |
|---|---|
| Power type | Electric drive |
| Adsorption mechanism | Permanent non-contact magnet |
| Obstacle crossing mechanism | Electric lifting platform |
| Welding actuator | 5-DOF manipulator |
| Body size/(mm) | 780 × 300 × 450 |
| Machine weight/(kg) | 80 |
| Maximum moving speed/(mm/min) | 1800 |
| Load capacity/(N) | 200 |
| Size of obstacles to cross/(mm) | 90×90 |
| Welding process | K-TIG |
| Parameter | k1 | k2 | k3 | |||
|---|---|---|---|---|---|---|
| 1 | 0.8 | 9 | 1.5 | 1.7 | 0.5 | |
| 1.1 | 0.8 | 9 | 0.9 | 1.6 | 0.5 |
| z | H11 | H12 | H21 | H22 | M1 | M2 | rw | rb |
|---|---|---|---|---|---|---|---|---|
| 5 | 2 | 2 | 1 | 4 | 5 | 5 | 5 | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, S.; Song, H.; Zheng, T.; Dai, P. Trajectory Tracking Control of Mobile Manipulator Based on Improved Sliding Mode Control Algorithm. Processes 2024, 12, 881. https://doi.org/10.3390/pr12050881
Cui S, Song H, Zheng T, Dai P. Trajectory Tracking Control of Mobile Manipulator Based on Improved Sliding Mode Control Algorithm. Processes. 2024; 12(5):881. https://doi.org/10.3390/pr12050881
Chicago/Turabian StyleCui, Shuwan, Huzhe Song, Te Zheng, and Penghui Dai. 2024. "Trajectory Tracking Control of Mobile Manipulator Based on Improved Sliding Mode Control Algorithm" Processes 12, no. 5: 881. https://doi.org/10.3390/pr12050881
APA StyleCui, S., Song, H., Zheng, T., & Dai, P. (2024). Trajectory Tracking Control of Mobile Manipulator Based on Improved Sliding Mode Control Algorithm. Processes, 12(5), 881. https://doi.org/10.3390/pr12050881