
Design and Simulation of End Effector for Young-Pear-Bagging Robot


Abstract
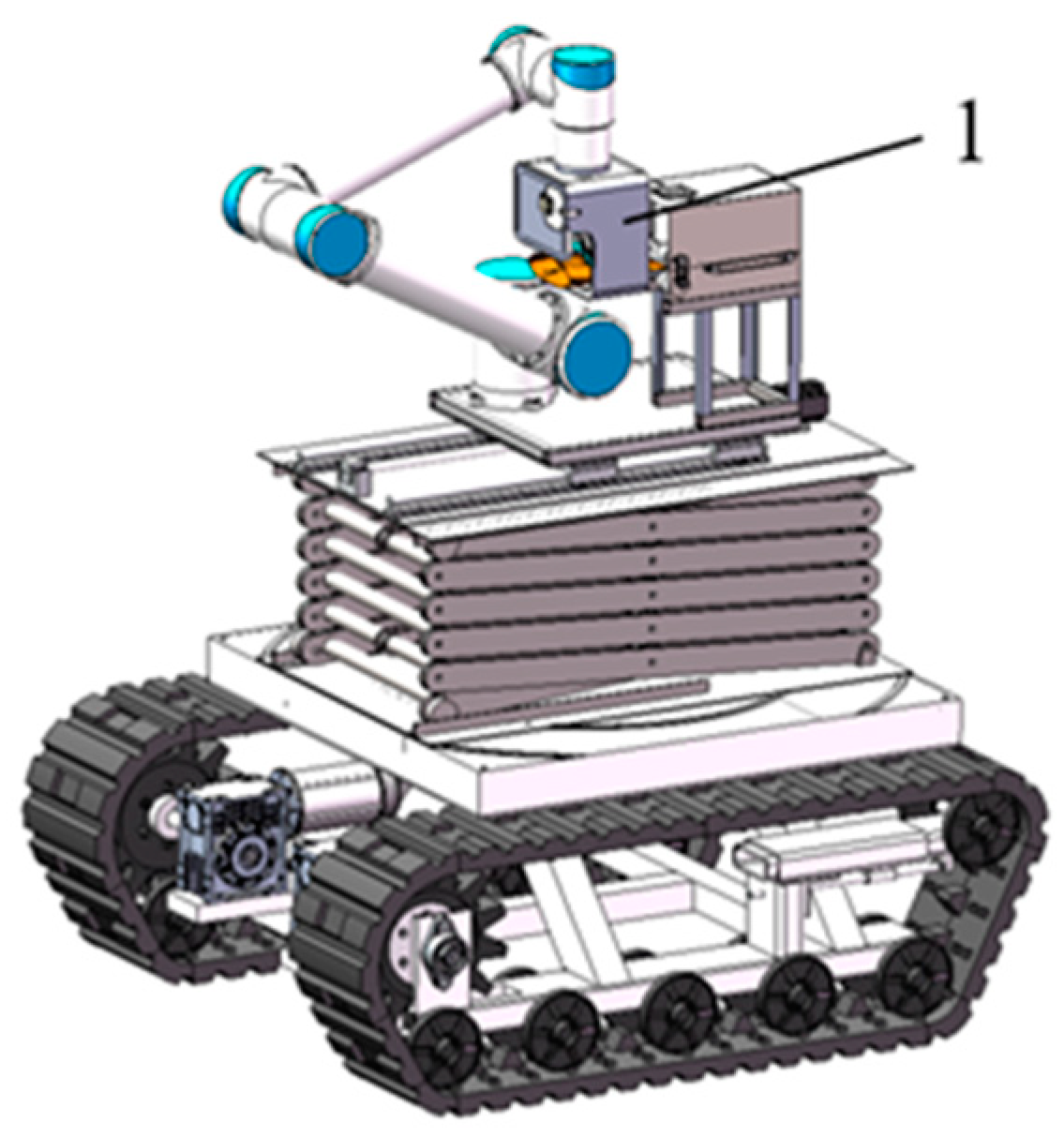
1. Introduction
2. Materials and Methods
2.1. Bagging Agronomy
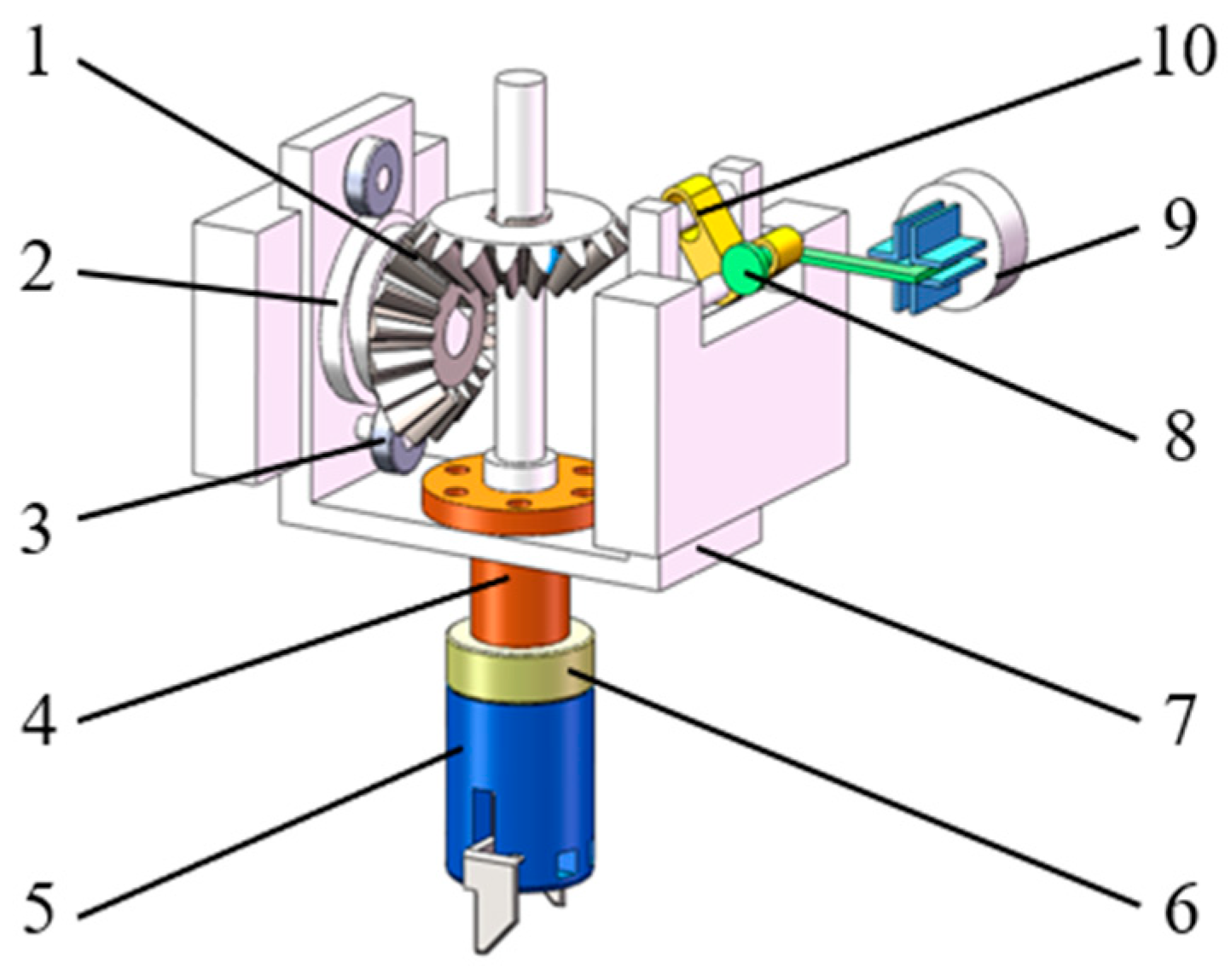
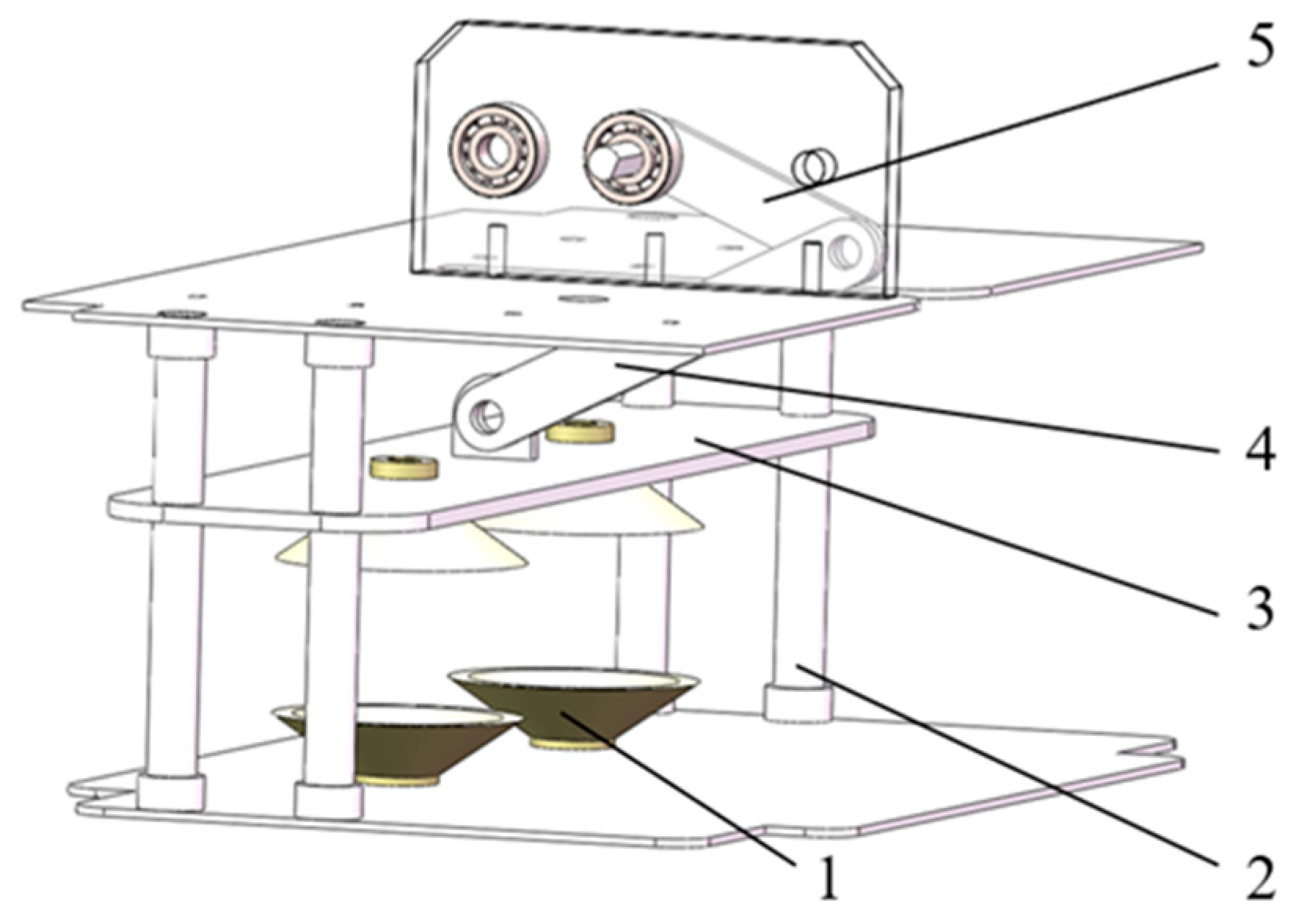
2.2. Structure
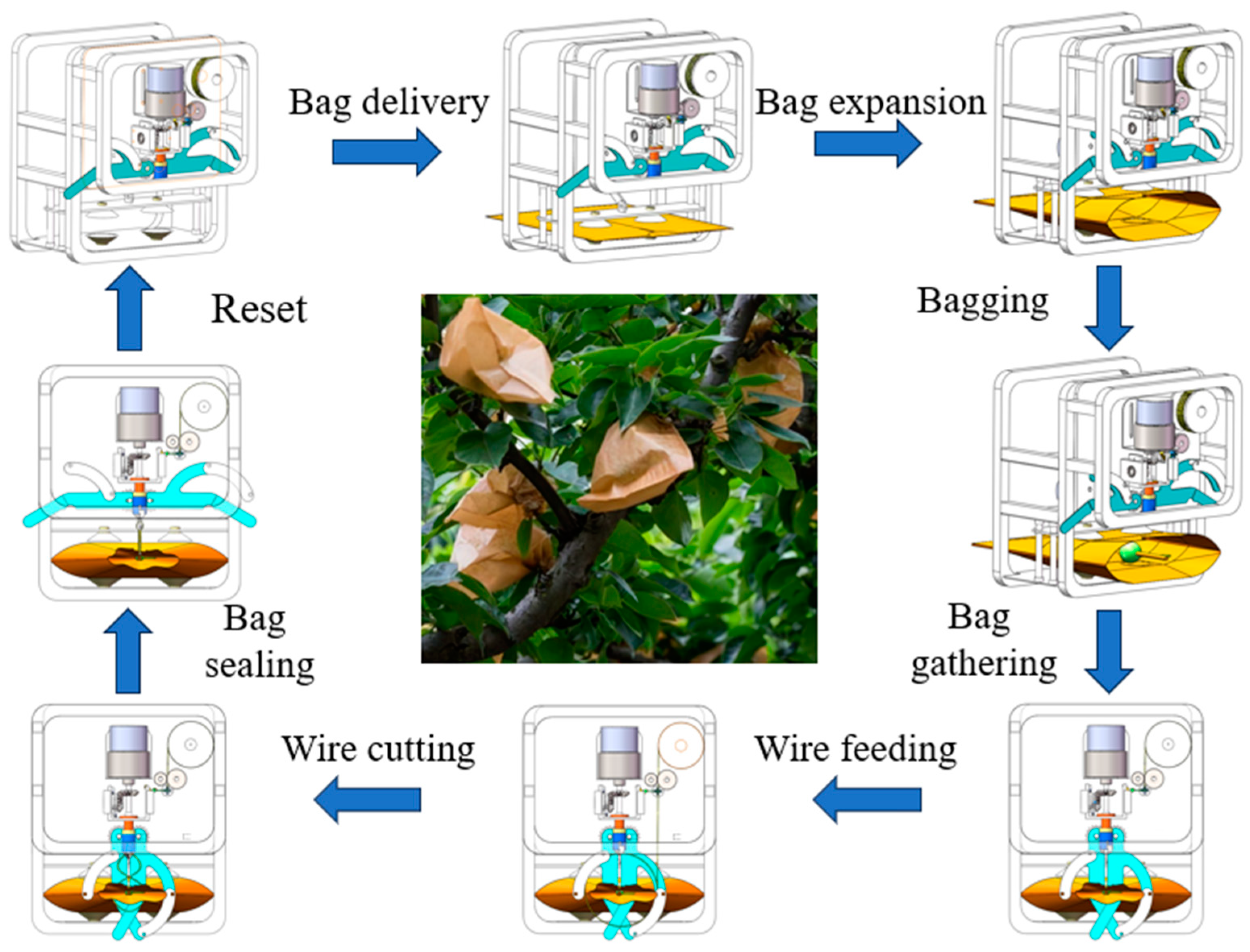
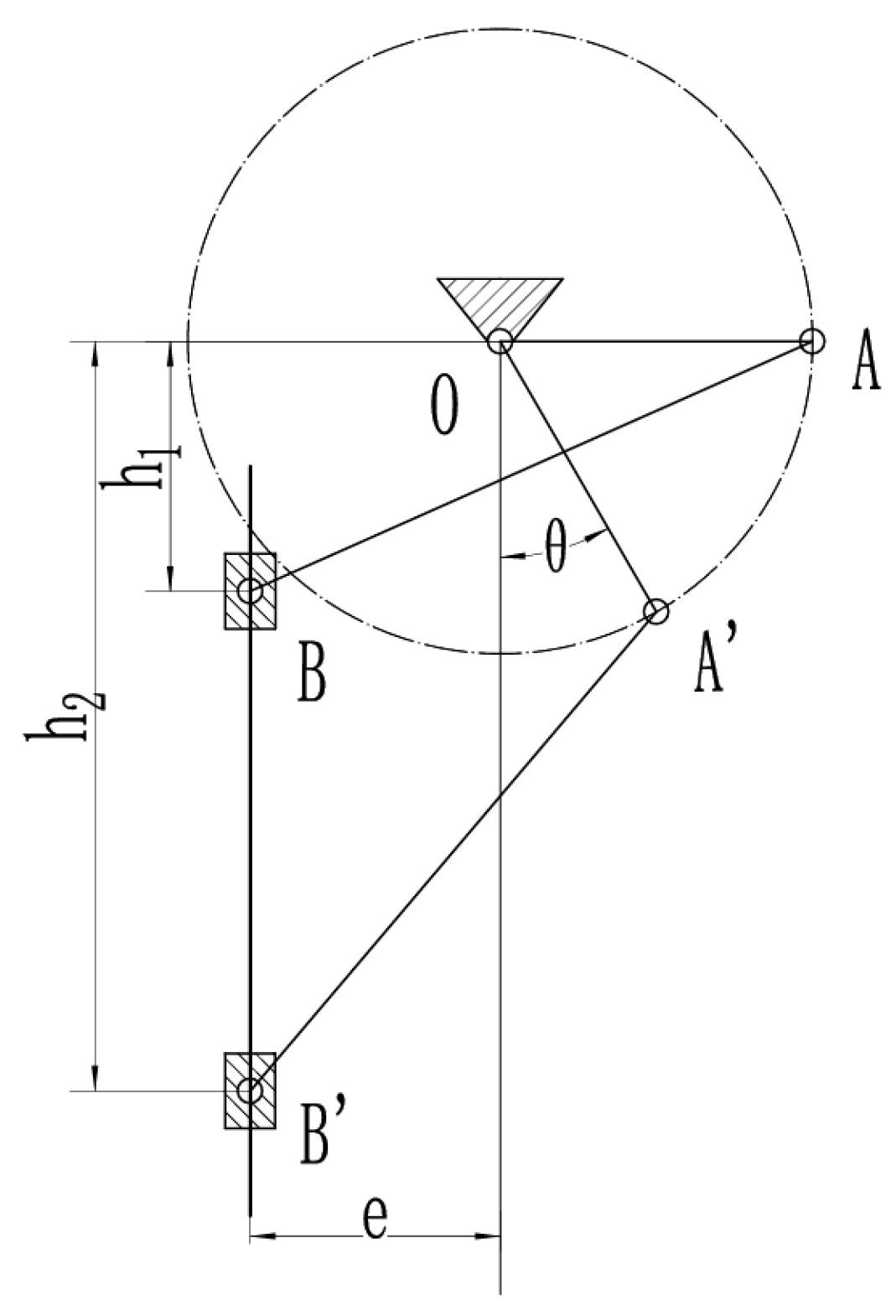
2.3. Operational Mechanism
2.4. Analysis of Critical Component
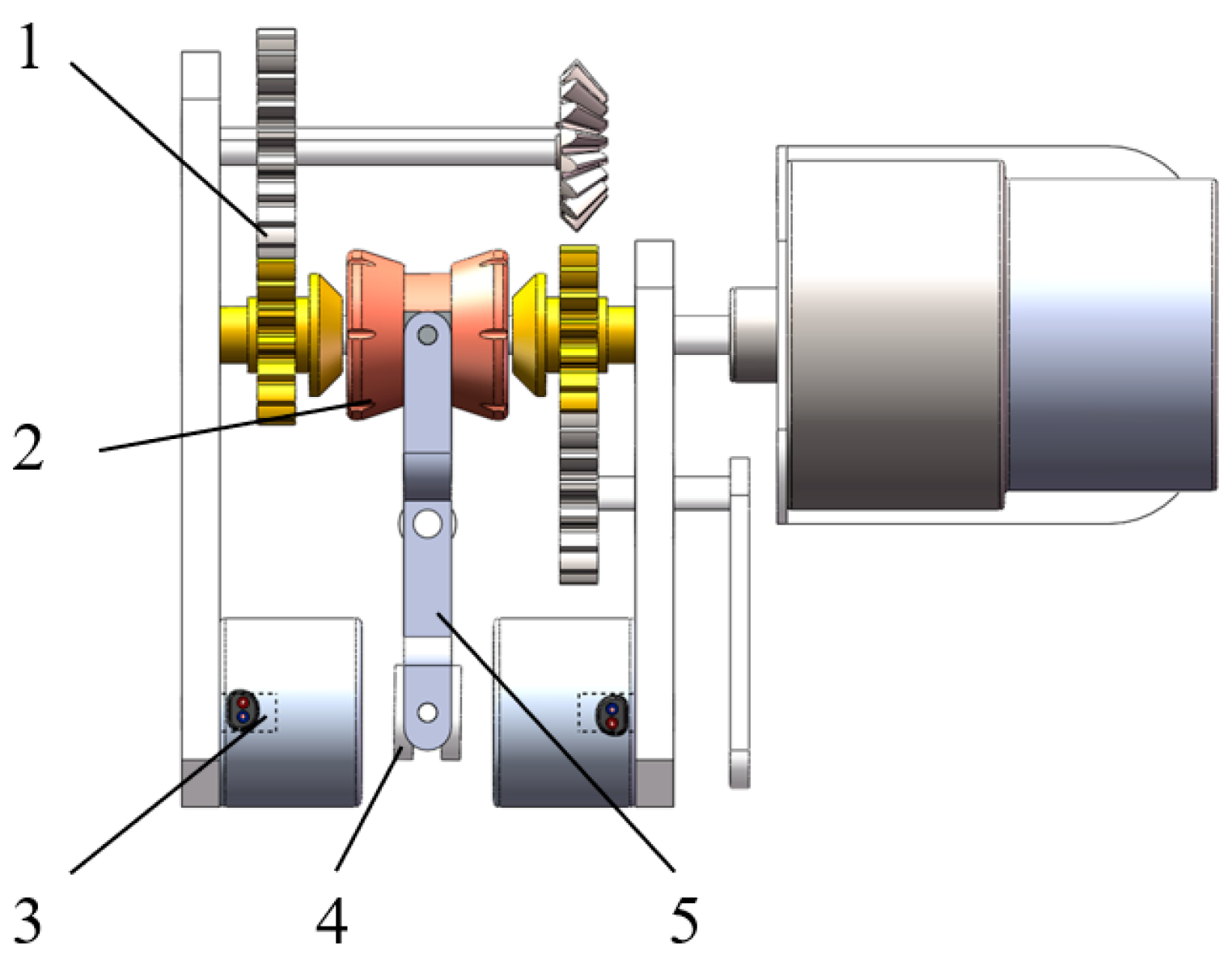
2.4.1. Transmission Component
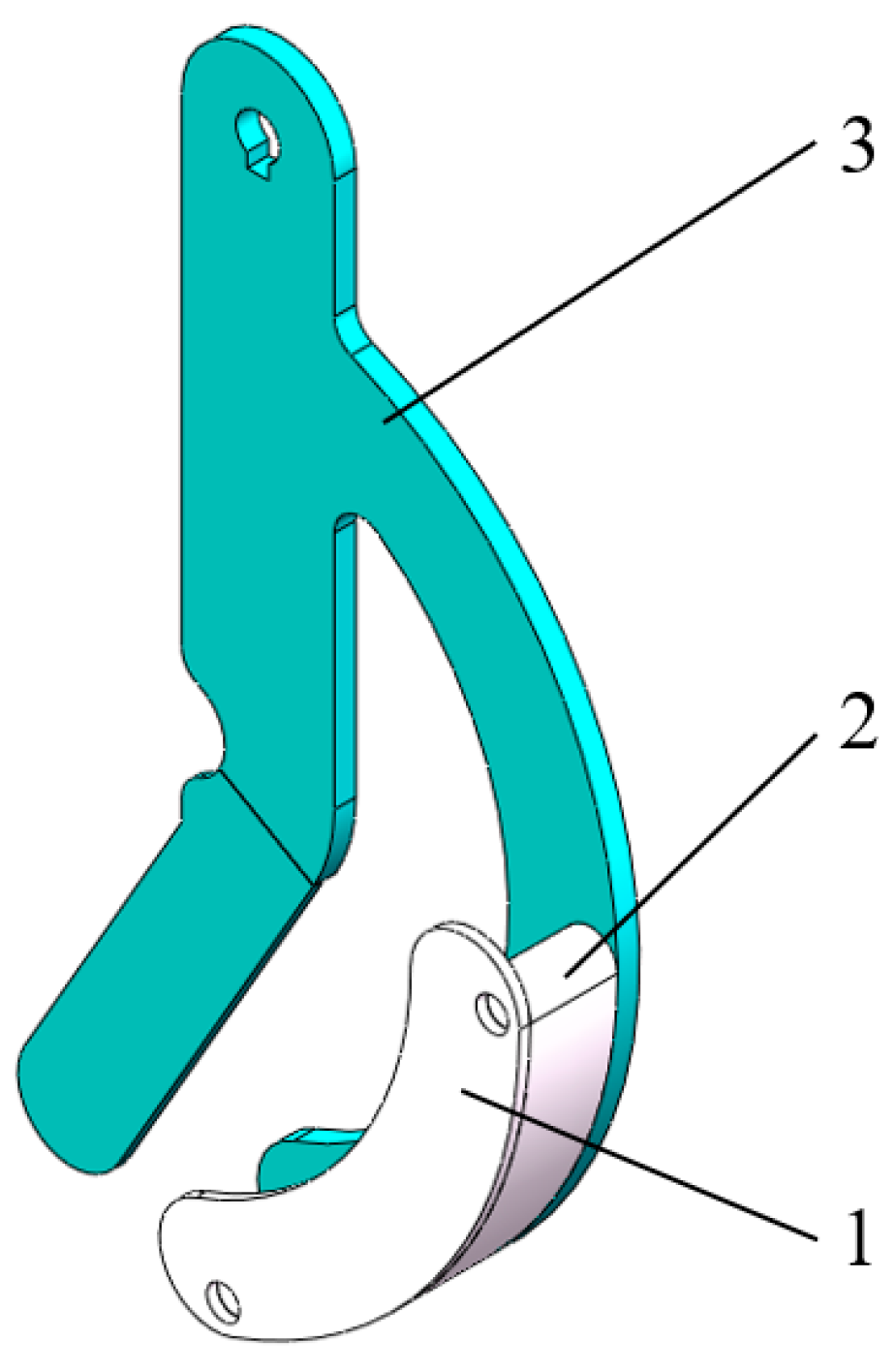
2.4.2. Bag-Expanding Component
2.4.3. Bag-Gathering Component
3. Results and Discussion
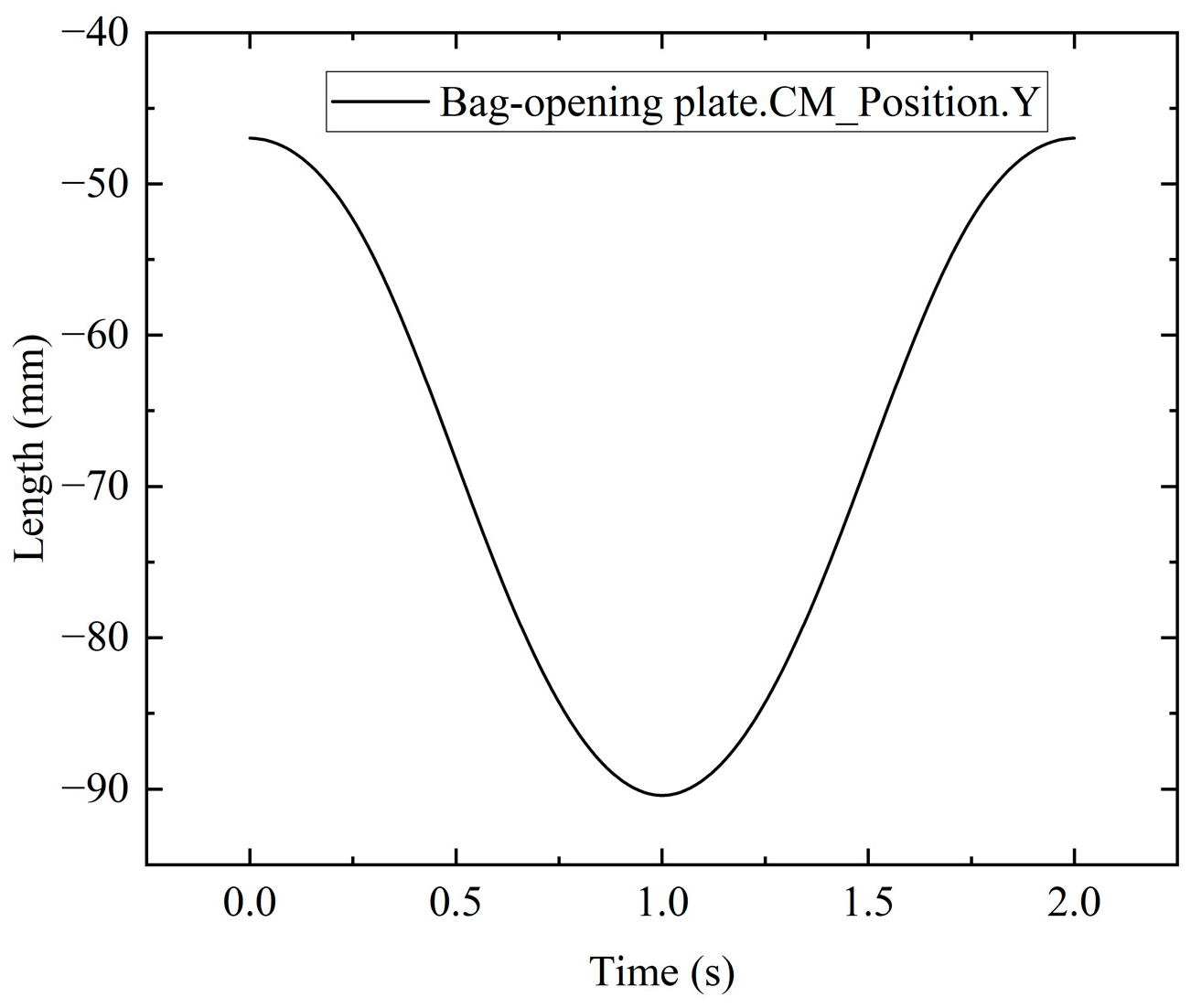
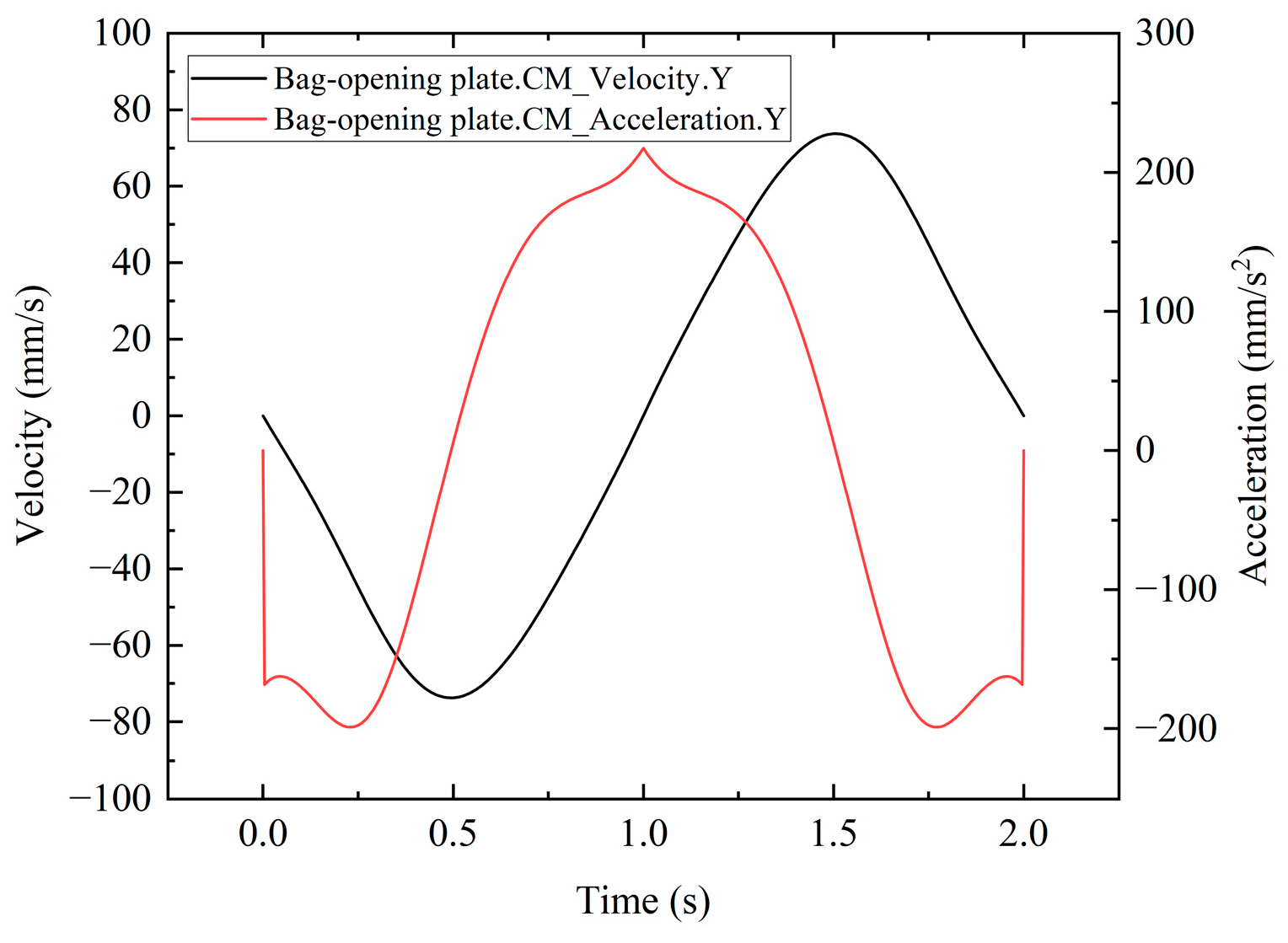
3.1. Kinematic Analysis
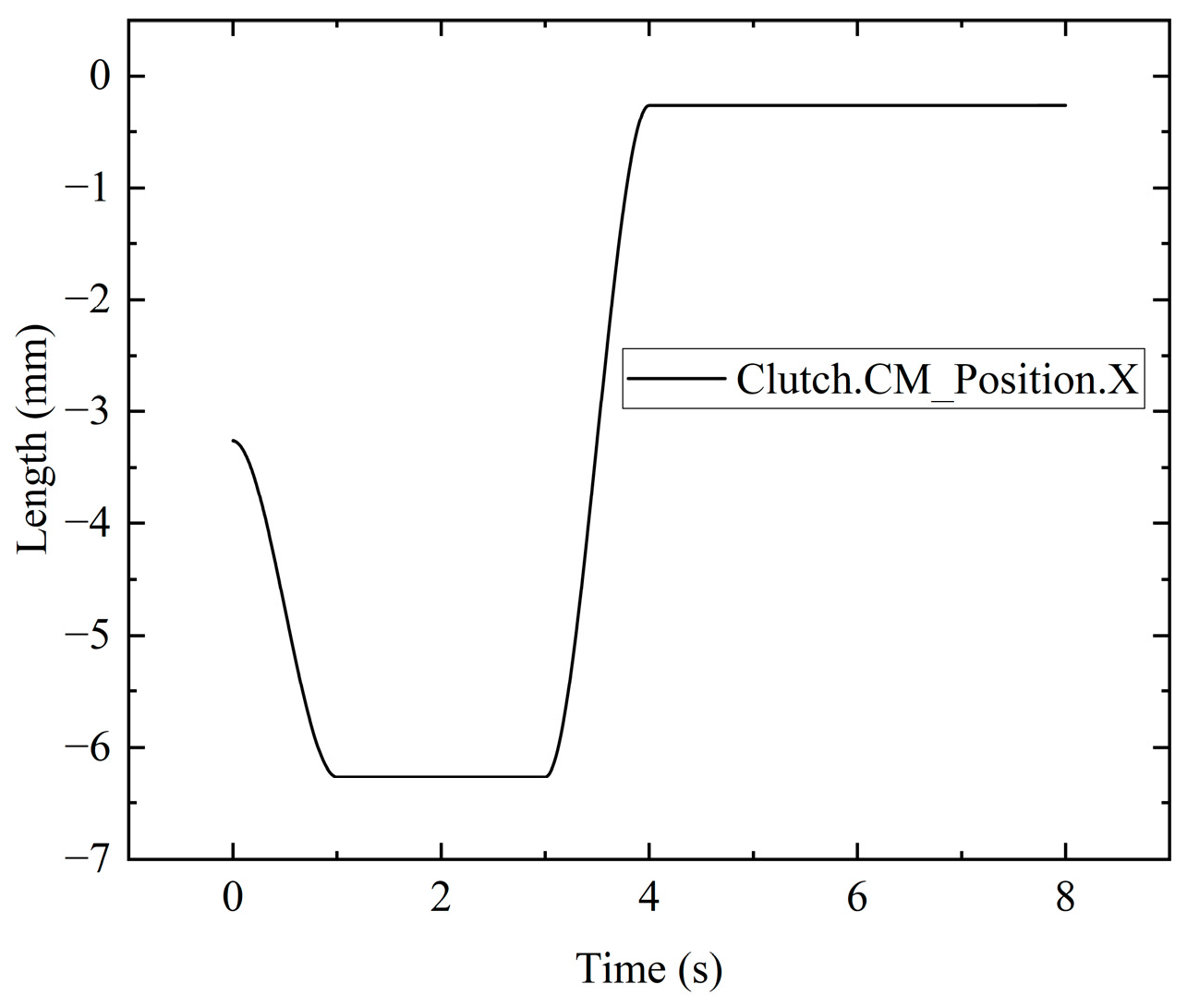
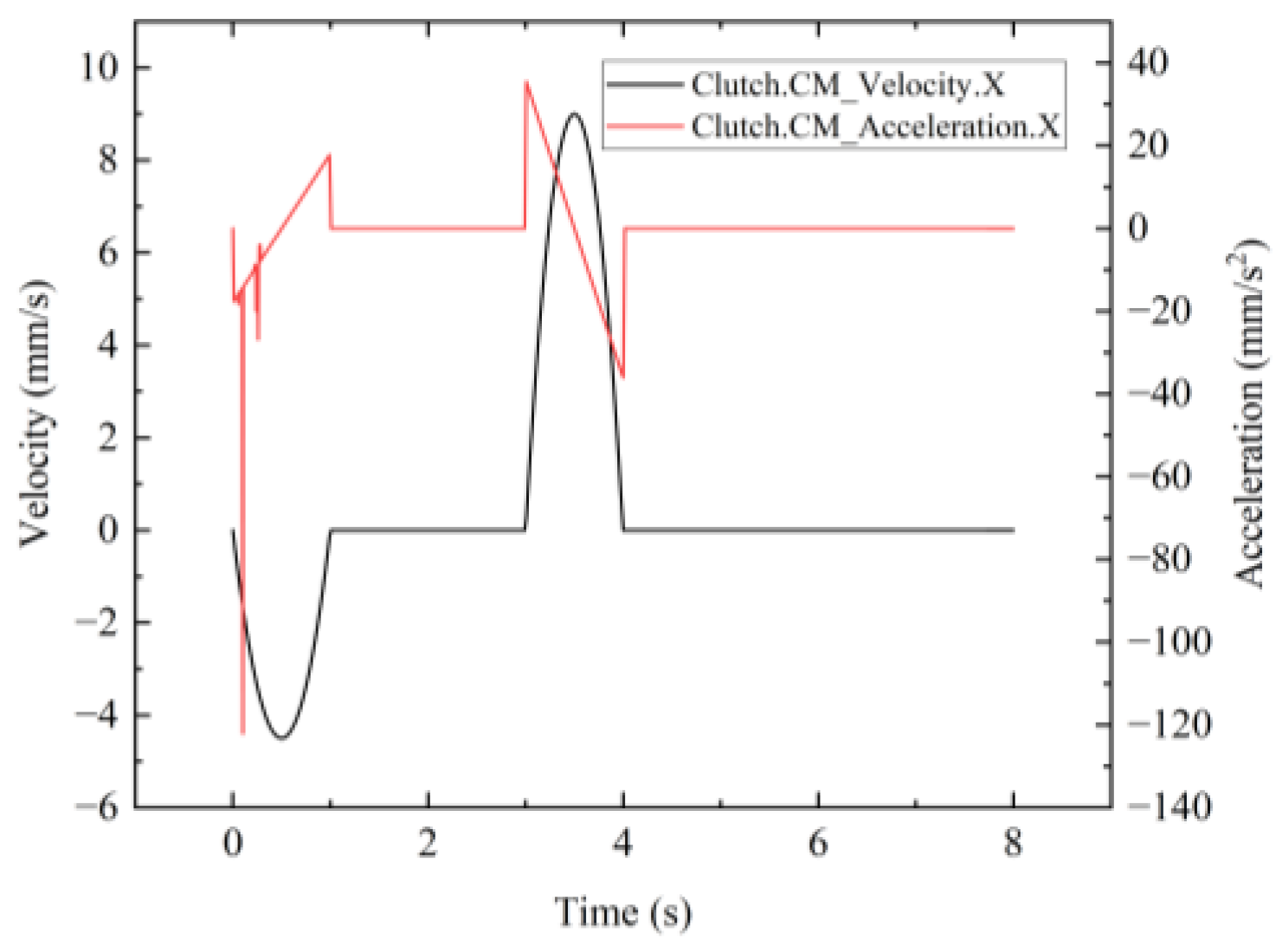
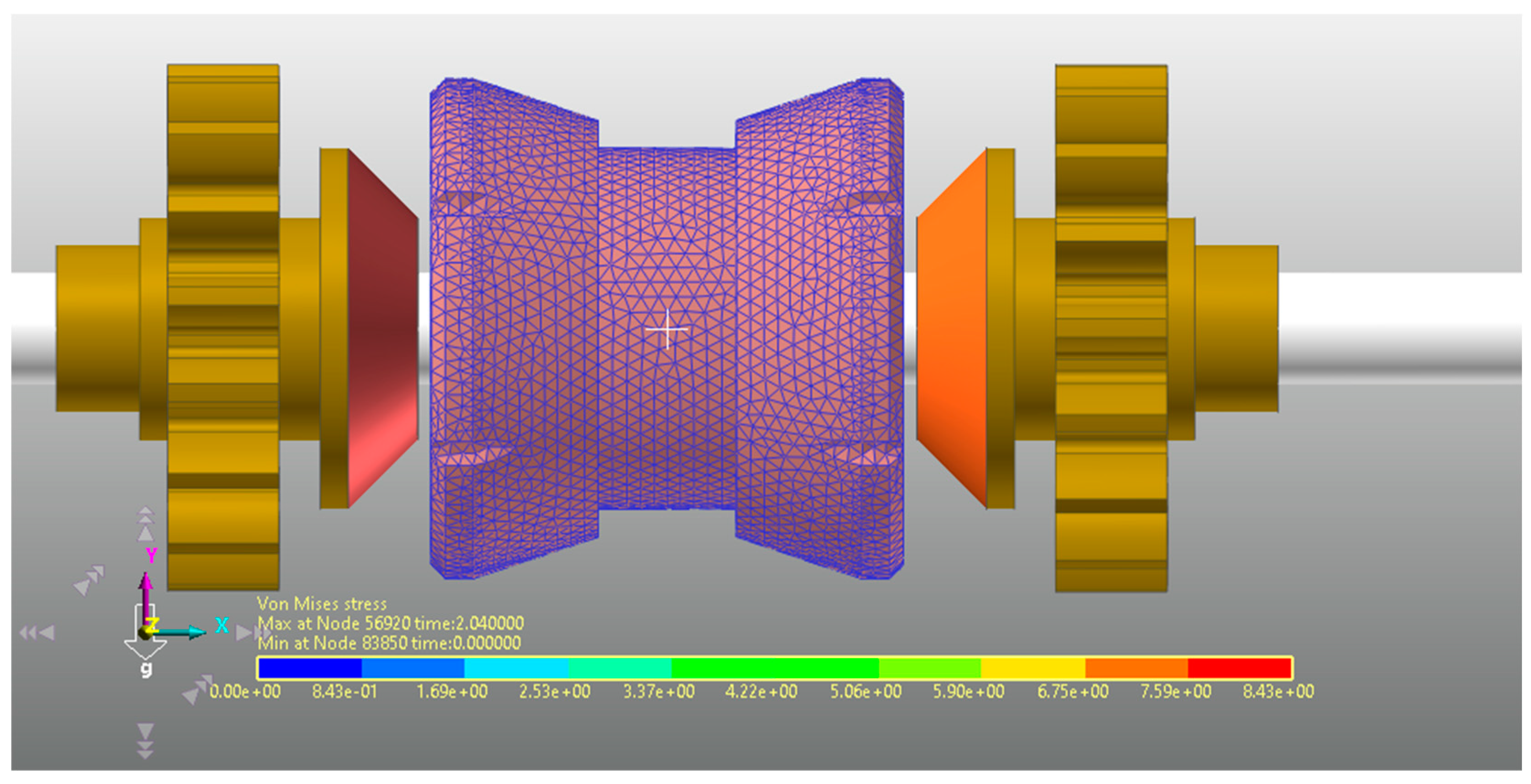
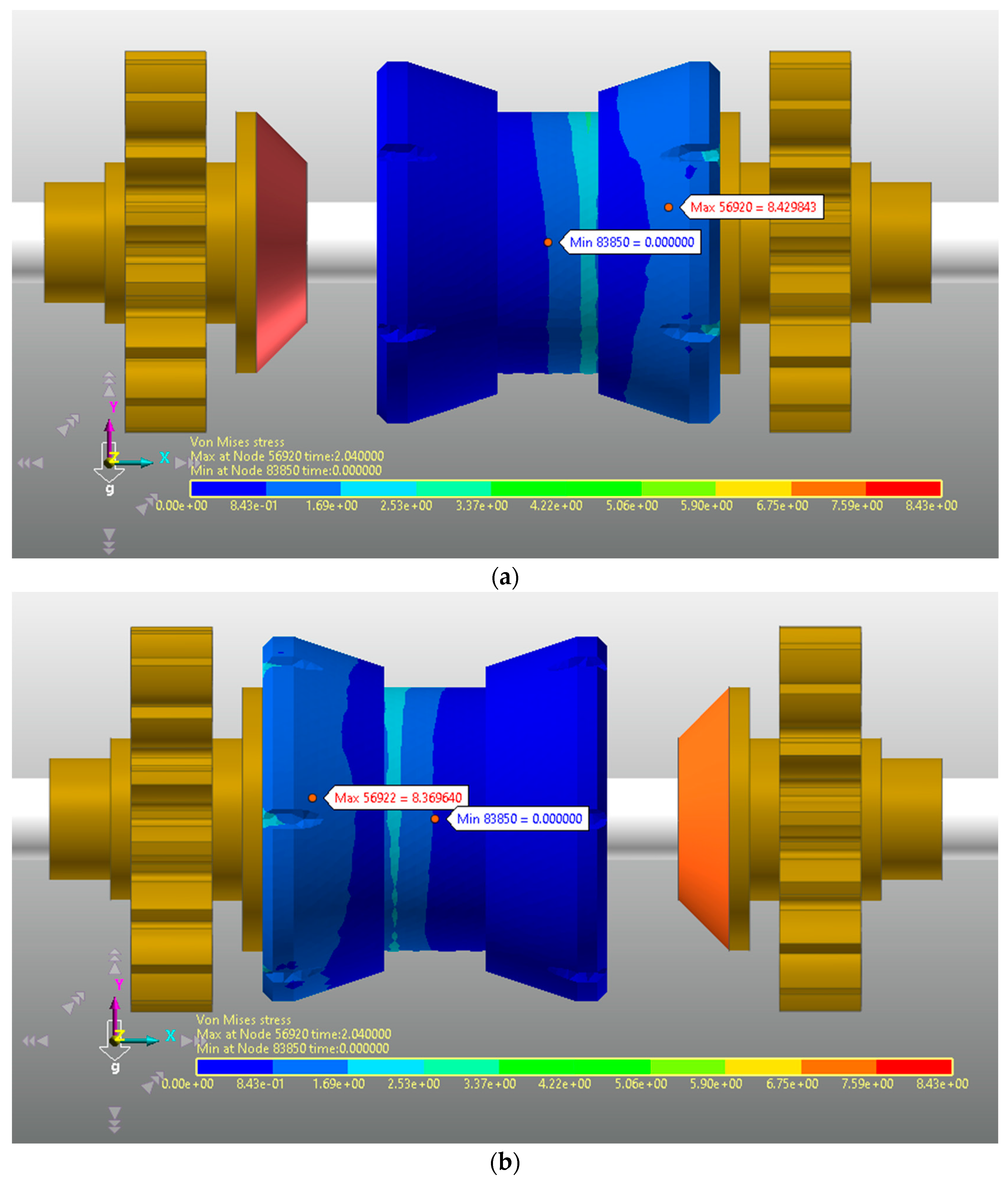
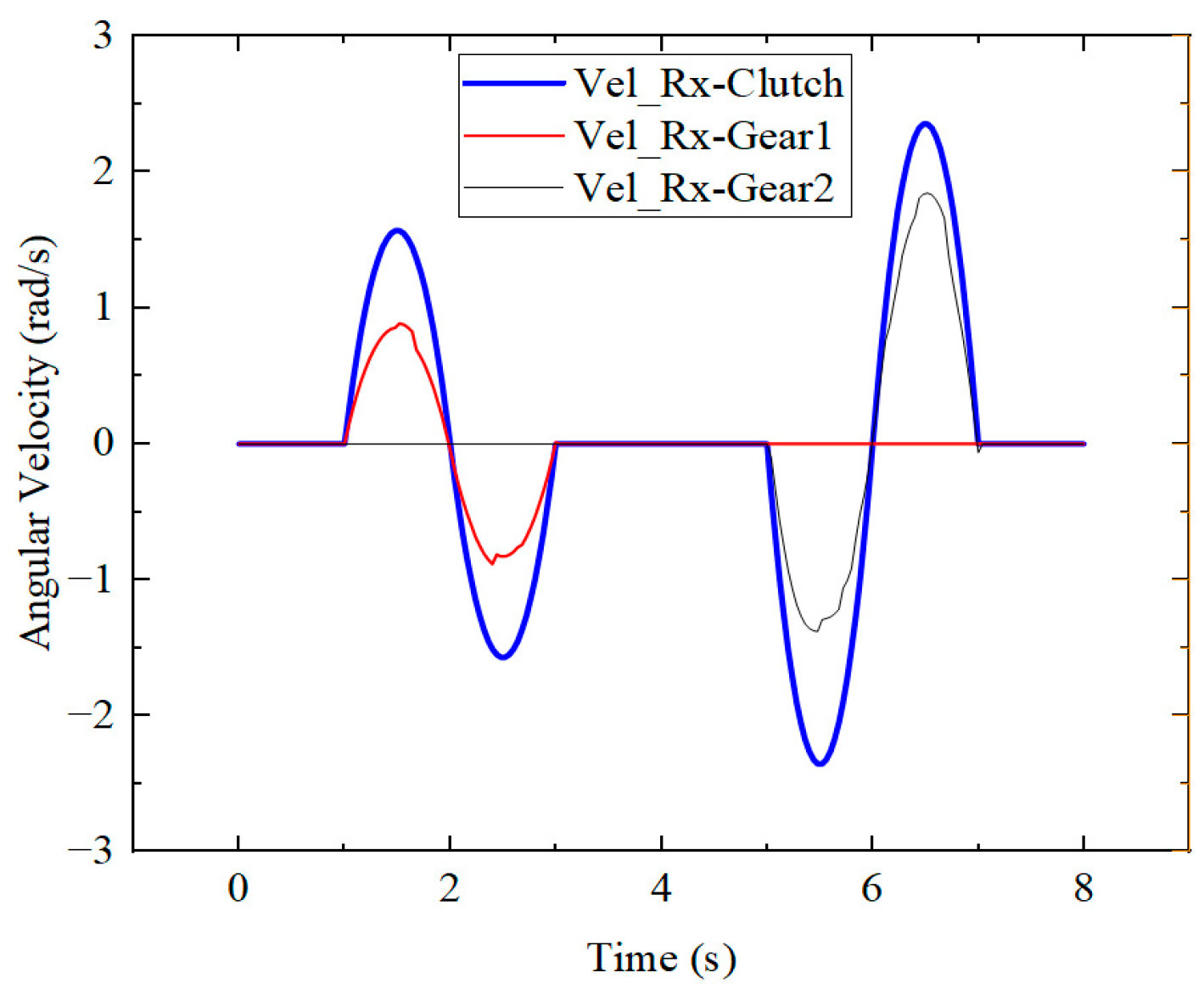
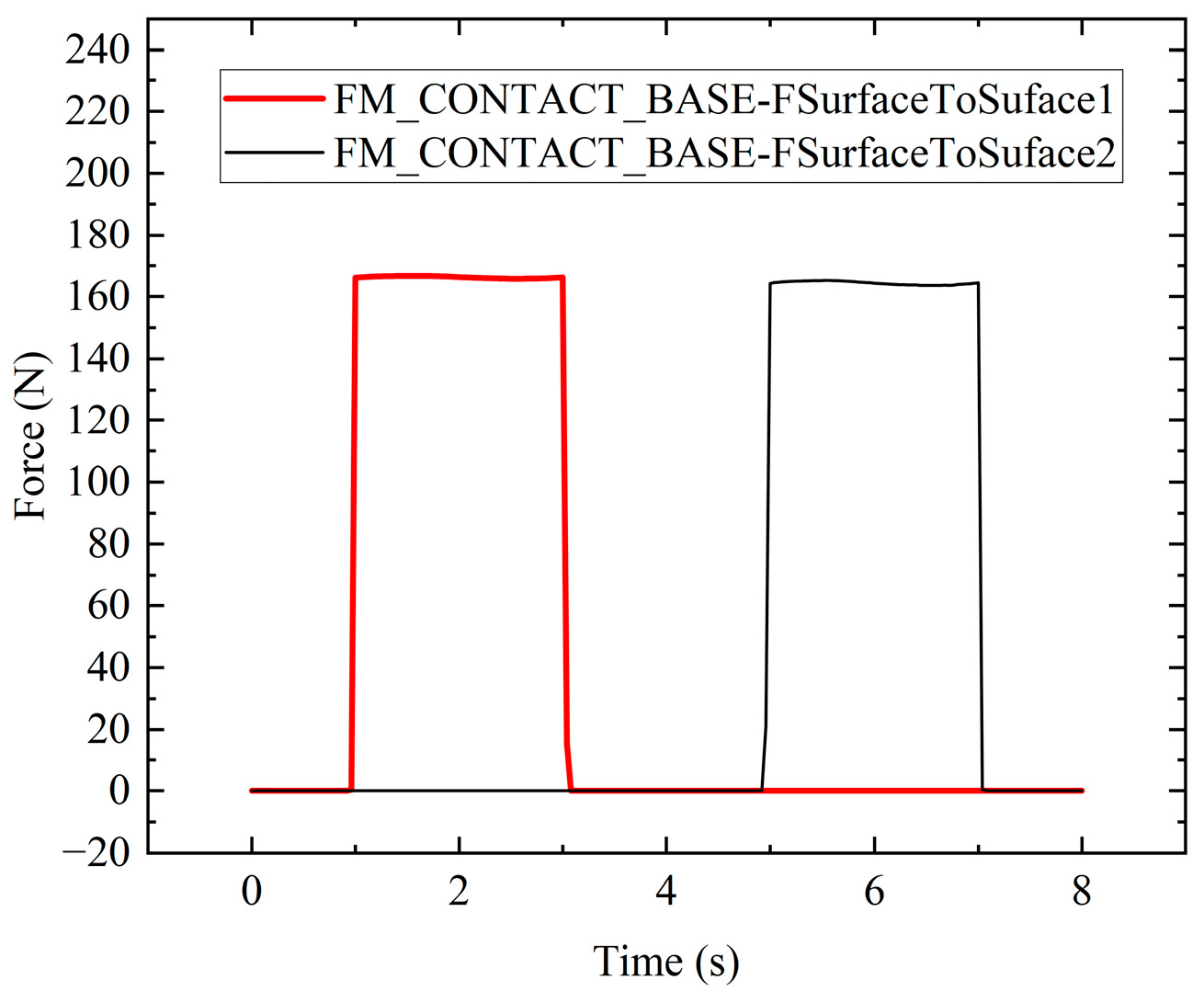
3.2. Dynamic Analysis
3.3. Discussion of Flexible Clutch
4. Conclusions
- We proposed a modularized design of a bagging end effector for fruit-production robots which allows for selection and configuration based on specific needs, enabling adaptability to different crops and orchards. Consequently, it achieves more flexible and efficient operation, providing enhanced convenience and benefits to agricultural production.
- Through action timing analysis and design optimization, the paper implements a motor for completing the bag-opening and bag-gathering actions via clutch transmission. This approach simplifies the system structure, reducing manufacturing costs while effectively controlling action timing to enhance accuracy and stability.
- The utilization of multi-body dynamics simulation software in this paper facilitates the simulation and analysis of flexible clutch transmission. This intuitive tool allows for the observation of various motion laws for each component and the derivation of characteristic curves. The results indicate that multi-body dynamics simulation software offers a rapid and reliable method for conducting structural design research.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kasso, M.; Bekele, A. Post-harvest loss and quality deterioration of horticultural crops in Dire Dawa Region, Ethiopia. J. Saudi Soc. Agric. Sci. 2018, 17, 88–96. [Google Scholar] [CrossRef]
- Ali, M.M.; Anwar, R.; Yousef, A.F.; Li, B.; Luvisi, A.; De Bellis, L.; Aprile, A.; Chen, F. Influence of Bagging on the Development and Quality of Fruits. Plants 2021, 10, 358. [Google Scholar] [CrossRef] [PubMed]
- Sharma, R.R.; Reddy, S.V.R.; Jhalegar, M.J. Pre-harvest fruit bagging: A useful approach for plant protection and improved post-harvest fruit quality—A review. J. Hortic. Sci. Biotechnol. 2015, 89, 101–113. [Google Scholar] [CrossRef]
- Ahmed, T.; Hasan, M.; Hassan, K.; Ahmed, J.D.; Ahmed, K.S.D.; Azam, A.; Mondal, F. Fruit bagging of custard apple (Annona reticulata) as an eco-friendly protection approach against mealybug (Phenacoccus solenopsis) infestation in the north-eastern Bangladesh. Int. J. Trop. Insect Sci. 2021, 42, 723–732. [Google Scholar] [CrossRef]
- Frank, D. Evaluation of Fruit Bagging as a Pest Management Option for Direct Pests of Apple. Insects 2018, 9, 178. [Google Scholar] [CrossRef]
- Leisso, R.; Jarrett, B.; Mendrey, K.; Miller, Z. Bagging Apple Fruit for Codling Moth Control in Western Montana. HortTechnology 2021, 31, 500–503. [Google Scholar] [CrossRef]
- Matsumoto, K.; Kobayashi, T.; Kougo, T.; Fujita, T.; Sato, S.; Moriguchi, T. Prevention of New Cork Spot-like Physiological Disorder in ‘Kurenainoyume’ Apples by Pre-harvest Fruit Bagging. Hortic. J. 2018, 87, 174–183. [Google Scholar] [CrossRef]
- Amarante, C.; Banks, N.H.; Max, S. Preharvest bagging improves packout and fruit quality of pears (Pyrus communis). N. Z. J. Crop. Hortic. Sci. 2002, 30, 93–98. [Google Scholar] [CrossRef]
- Sharma, R.R.; Pal, R.K.; Sagar, V.R.; Parmanick, K.K.; Paul, V.; Gupta, V.K.; Kumar, K.; Rana, M.R. Impact of pre-harvest fruit-bagging with different coloured bags on peel colour and the incidence of insect pests, disease and storage disorders in ‘Royal Delicious’ apple. J. Hortic. Sci. Biotechnol. 2015, 89, 613–618. [Google Scholar] [CrossRef]
- Buthelezi, N.M.D.; Mafeo, T.P.; Mathaba, N. Preharvest Bagging as an Alternative Technique for Enhancing Fruit Quality: A Review. HortTechnology 2021, 31, 4–13. [Google Scholar] [CrossRef]
- Paul, J.R.; Prasad, K.; Lalrinngheta, J.; Mukhim, C.; Akshatha, H. Improving fruit quality by bagging technology. Food Sci. 2021, 2, 49–53. [Google Scholar]
- Zha, Q.; Xi, X.J.; He, Y.; Jiang, A.L. Bagging Affecting Sugar and Anthocyanin Metabolism in the Ripening Period of Grape Berries. Not. Bot. Horti Agrobot. Cluj-Napoca 2019, 47, 1194–1205. [Google Scholar] [CrossRef]
- Legua, P.; Martínez-Nicolás, J.J.; Guirao, P.; Hernández, F.; Núñez-Gómez, D.; Melgarejo, P. Influence of fruit bagging technique on the morphometric and biochemical characteristics of two pomegranate varieties (Punica granatum L.). Food Chem. Mol. Sci. 2022, 4, 100112. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Gu, F.; Wu, F.; Wang, B.; Shi, L.; Hu, Z. Production, Use and Recycling of Fruit Cultivating Bags in China. Sustainability 2022, 14, 14144. [Google Scholar] [CrossRef]
- Kondo, N.; Monta, M.; Fujiura, T. Fruit harvesting robots in Japan. Adv. Space Res. 1996, 18, 181–184. [Google Scholar] [CrossRef] [PubMed]
- Vrochidou, E.; Tziridis, K.; Nikolaou, A.; Kalampokas, T.; Papakostas, G.A.; Pachidis, T.P.; Mamalis, S.; Koundouras, S.; Kaburlasos, V.G. An Autonomous Grape-Harvester Robot: Integrated System Architecture. Electronics 2021, 10, 1056. [Google Scholar] [CrossRef]
- Hua, Y.; Yang, B.; Zhou, X.-G.; Zhao, J.; Li, L. A novel progressively delivered fruit bagging apparatus. J. Appl. Hortic. 2016, 18, 123–127. [Google Scholar] [CrossRef]
- Peta, K.; Wlodarczyk, J.; Maniak, M. Analysis of trajectory and motion parameters of an industrial robot cooperating with a numerically controlled machine tools. J. Manuf. Process. 2023, 101, 1332–1342. [Google Scholar] [CrossRef]
- Metzner, M.; Leurer, S.; Handwerker, A.; Karlidag, E.; Blank, A.; Hefner, F.; Franke, J. High-precision assembly of electronic devices with lightweight robots through sensor-guided insertion. Procedia CIRP 2021, 97, 337–341. [Google Scholar] [CrossRef]
- Xia, H.; Zhen, W.; Chen, D.; Zeng, W. Rigid-flexible coupling contact action simulation study of the open mechanism on the ordinary multilayer fruit paper bag for fruit bagging. Comput. Electron. Agric. 2020, 173, 105414. [Google Scholar] [CrossRef]
- Zhang, K.; Zhao, L.; Sun, Z. Design and Target Extraction of Intelligent Grape Bagging robot. Trans. Chin. Soc. Agric. Mach. 2013, 44, 240–246. [Google Scholar]
- Jiao, X.J.; Zhang, X.W.; Peng, B.B. RecurDyn Multi-Body System Optimization Simulation Technology; Tsinghua University Press: Beijing, China, 2010; pp. 287–295. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Growth Stages | Characteristics |
|---|---|
| Germination Stage | After fertilization of the pear flower, the ovule undergoes division and growth, eventually transforming into a fruitlet. |
| Enlargement Stage | During this stage, the fruit epidermis gradually solidifies and becomes susceptible to the external environment. |
| Slow Growth Stage | During this stage, the pulp initiates its formation, necessitating abundant illumination and moisture. |
| Maturation Stage | Once the pear fruit has ripened, its exterior adopts a yellow or greenish-yellow hue and the flesh takes on a fluffy texture. |
| Parameter | Volume |
|---|---|
| Transverse Diameter (mm) | 20~30 |
| Fruit Stalk Length (mm) | 30~40 |
| Subjects | Parameters | Volume |
|---|---|---|
| Flexible Clutch | Density (kg·m−3) | 7.85 × 10−6 |
| Young’s Modulus (Pa) | 200,000 | |
| Poisson’s Ratio | 0.285 | |
| Flexible Clutch–Gears | Max. Penetration | 1 |
| Static Friction Coefficient | 1.26 | |
| Friction Coefficient | 1.2 |
| Parameters | Rotation Angle | |||
|---|---|---|---|---|
| Clutch | 60° | 60° | 90° | 90° |
| Gear1 | 33.8° | 31.5° | / | / |
| Gear2 | / | / | 52.6° | 70.1° |
| Drive efficiency | 56.3% | 52.5% | 58.4% | 77.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, C.; Chen, Z.; Wu, M.; Shen, Y. Design and Simulation of End Effector for Young-Pear-Bagging Robot. Processes 2024, 12, 259. https://doi.org/10.3390/pr12020259
Teng C, Chen Z, Wu M, Shen Y. Design and Simulation of End Effector for Young-Pear-Bagging Robot. Processes. 2024; 12(2):259. https://doi.org/10.3390/pr12020259
Chicago/Turabian StyleTeng, Chao, Zhenmu Chen, Mingge Wu, and Yunde Shen. 2024. "Design and Simulation of End Effector for Young-Pear-Bagging Robot" Processes 12, no. 2: 259. https://doi.org/10.3390/pr12020259
APA StyleTeng, C., Chen, Z., Wu, M., & Shen, Y. (2024). Design and Simulation of End Effector for Young-Pear-Bagging Robot. Processes, 12(2), 259. https://doi.org/10.3390/pr12020259