
Design and Testing of a Bionic Seed Planter Furrow Opener for Gryllulus Jaws Based on the Discrete Element Method (DEM)

Abstract
1. Introduction
2. Materials and Methods
2.1. Structural Bionics of Gryllulus Jaws
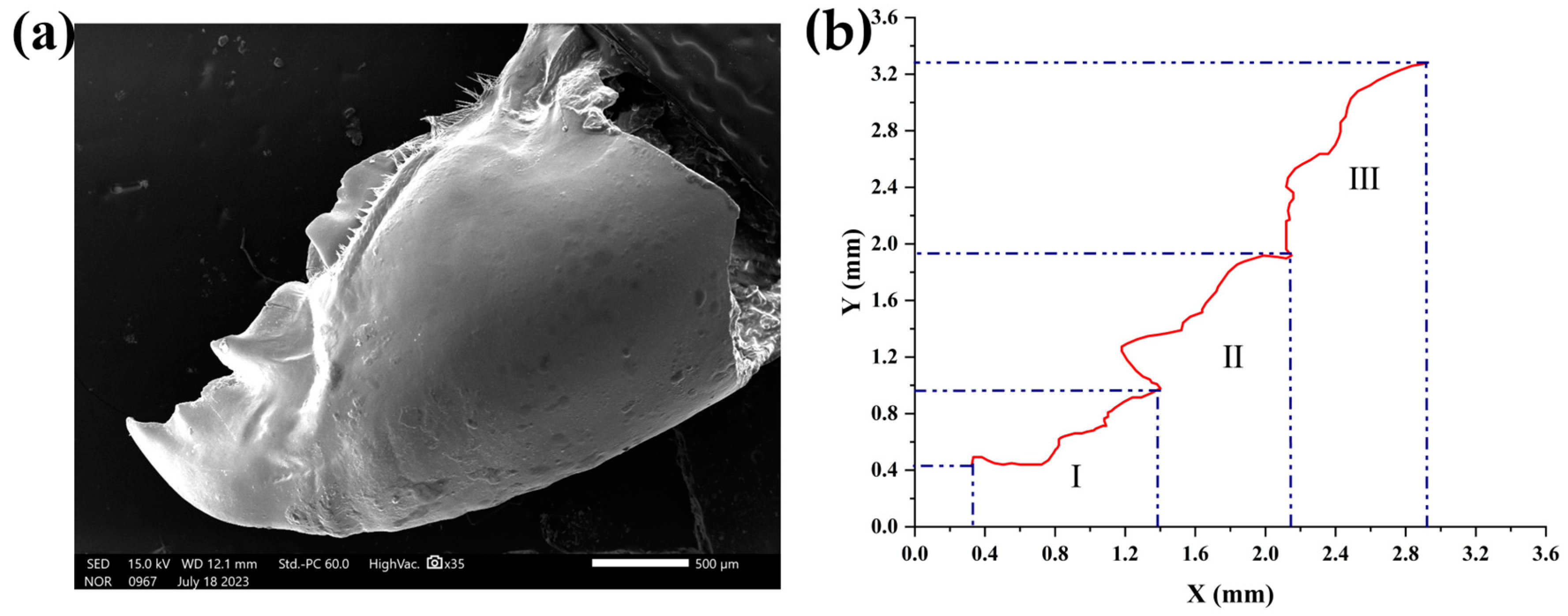
2.1.1. Structural Analysis
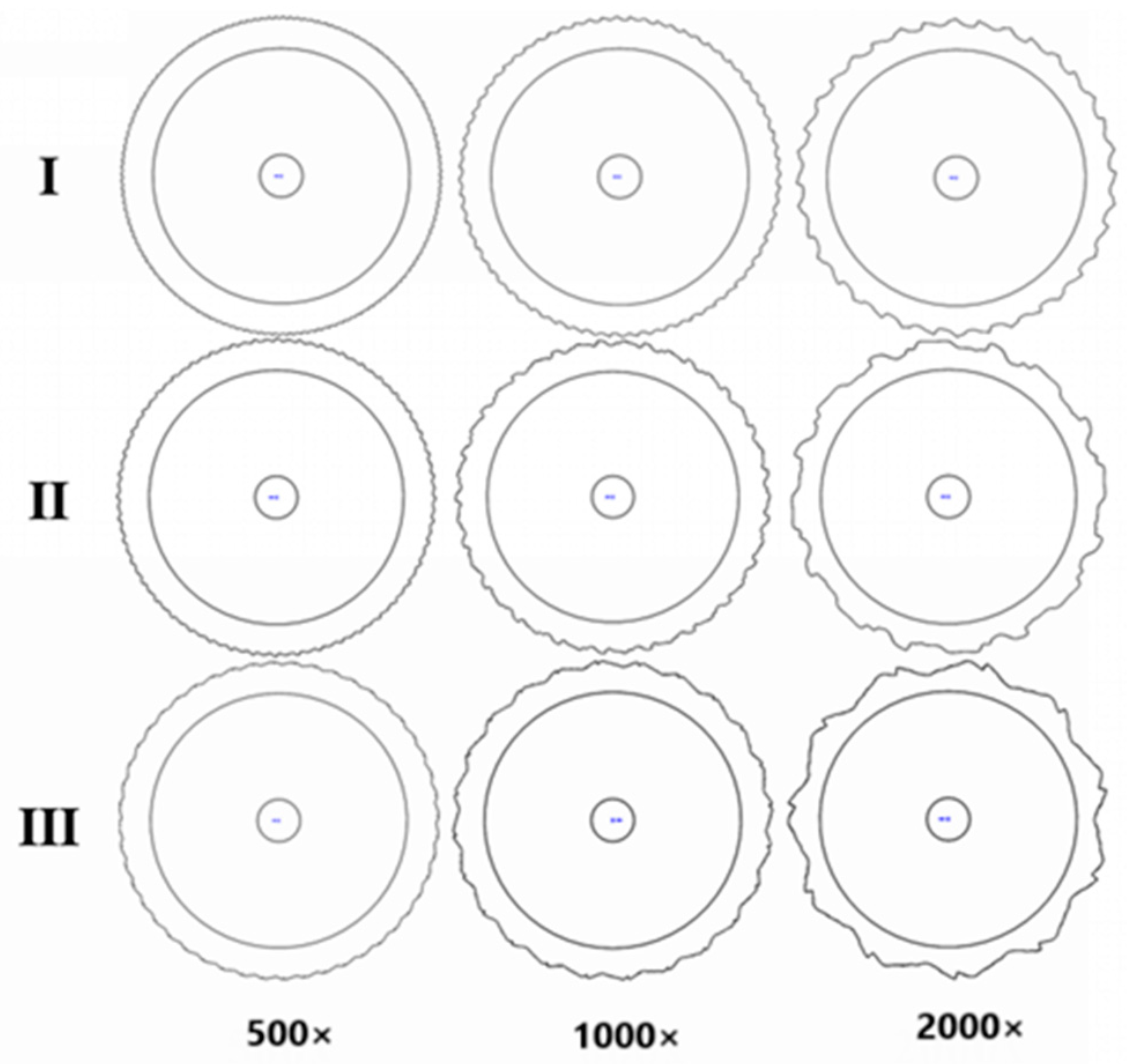
2.1.2. Contour Application
2.2. Discrete Element Modeling of Test Materials
2.2.1. Principles of Discrete Element Modeling
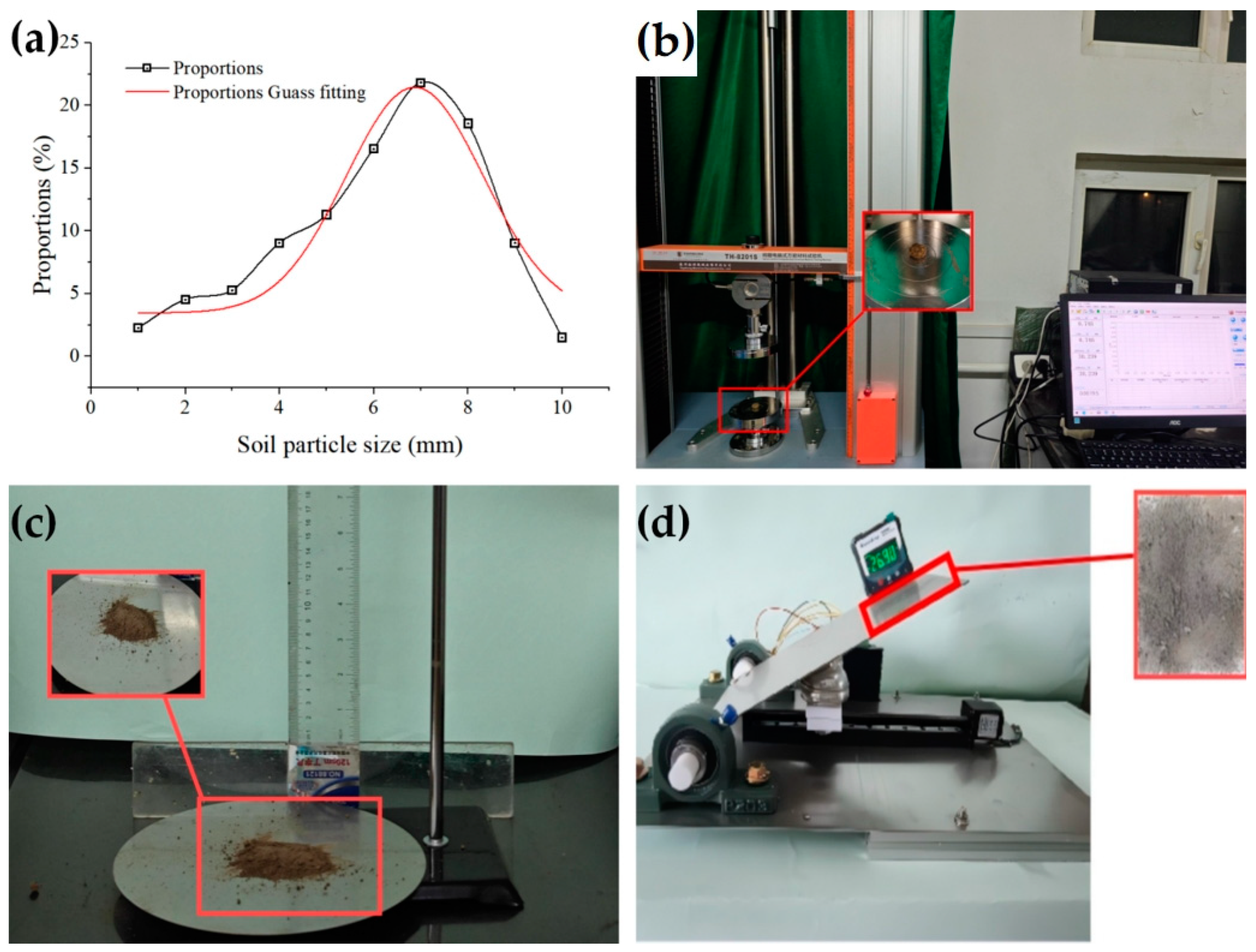
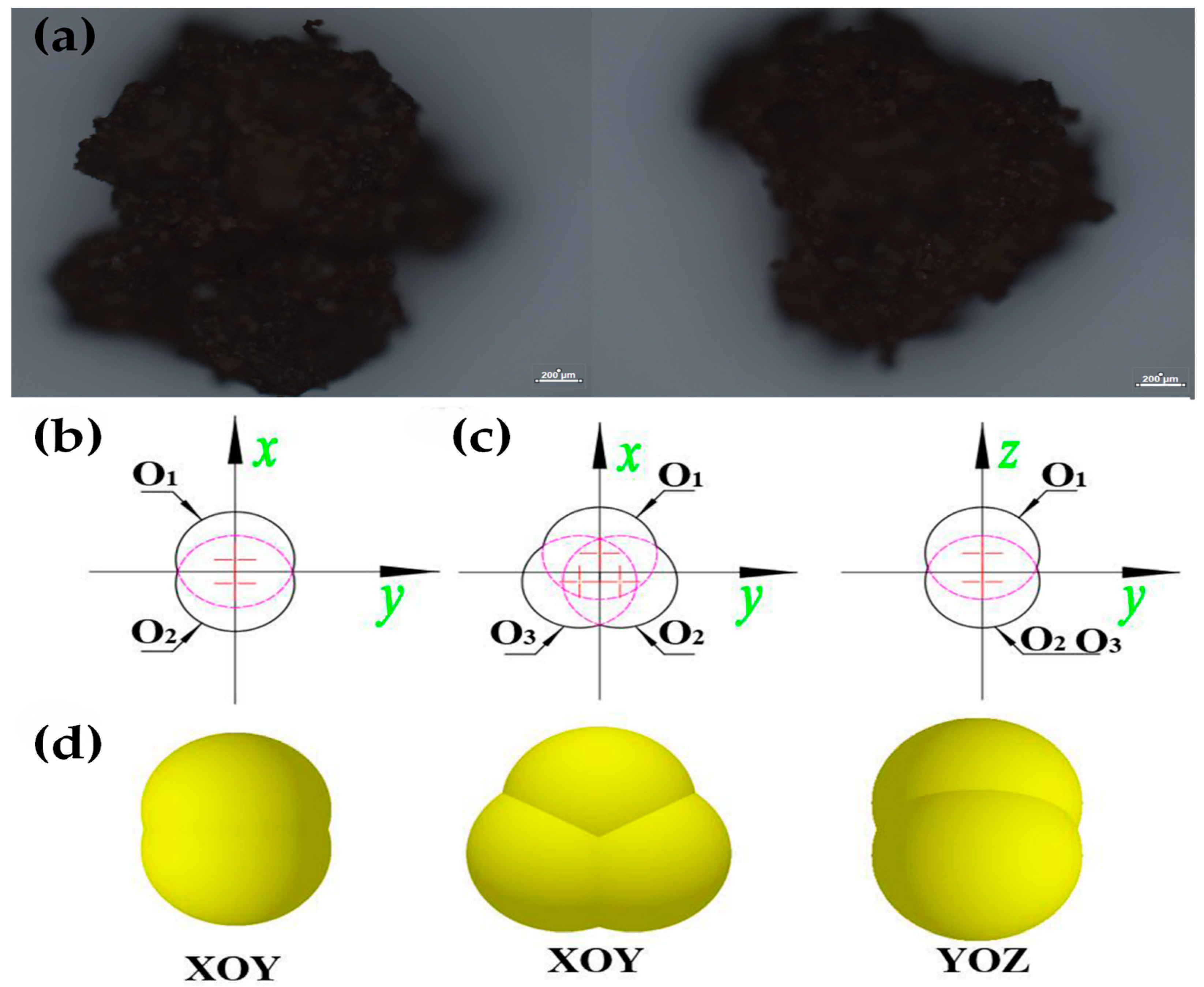
2.2.2. Discrete Element Modeling of Soil Materials
2.2.3. Straw Discrete Element Modeling
2.3. Optimization of Bionic Furrow Opener Parameters and Validation Test
2.3.1. Soil Simulation Tests
2.3.2. Straw Simulation Test
2.3.3. Field Trials
3. Test Results and Discussions
3.1. Soil Simulation Test Results and Analysis
3.1.1. Soil Simulation Cutting Test Results
3.1.2. Soil Simulation Seeding Process Simulation Results
3.1.3. Analysis of Soil Simulation Test Results
3.2. Straw Simulation Test Results and Analysis
3.2.1. Straw Simulation Cutting Test Results
3.2.2. Straw Simulation Seeding Process Simulation Results
3.2.3. Analysis of Straw Simulation Test Results
3.3. Field Trial Results and Analysis
3.3.1. Field Trial Results
3.3.2. Analysis of Field Trial Results
4. Conclusions
- (1)
- By extracting the structure of gryllulus ‘jaw tooth marks, tooth marks No. 1, No. 2, and No. 3 were extracted, and 500, 1000, and 2000 magnifications were selected to be applied to disk furrow openers.
- (2)
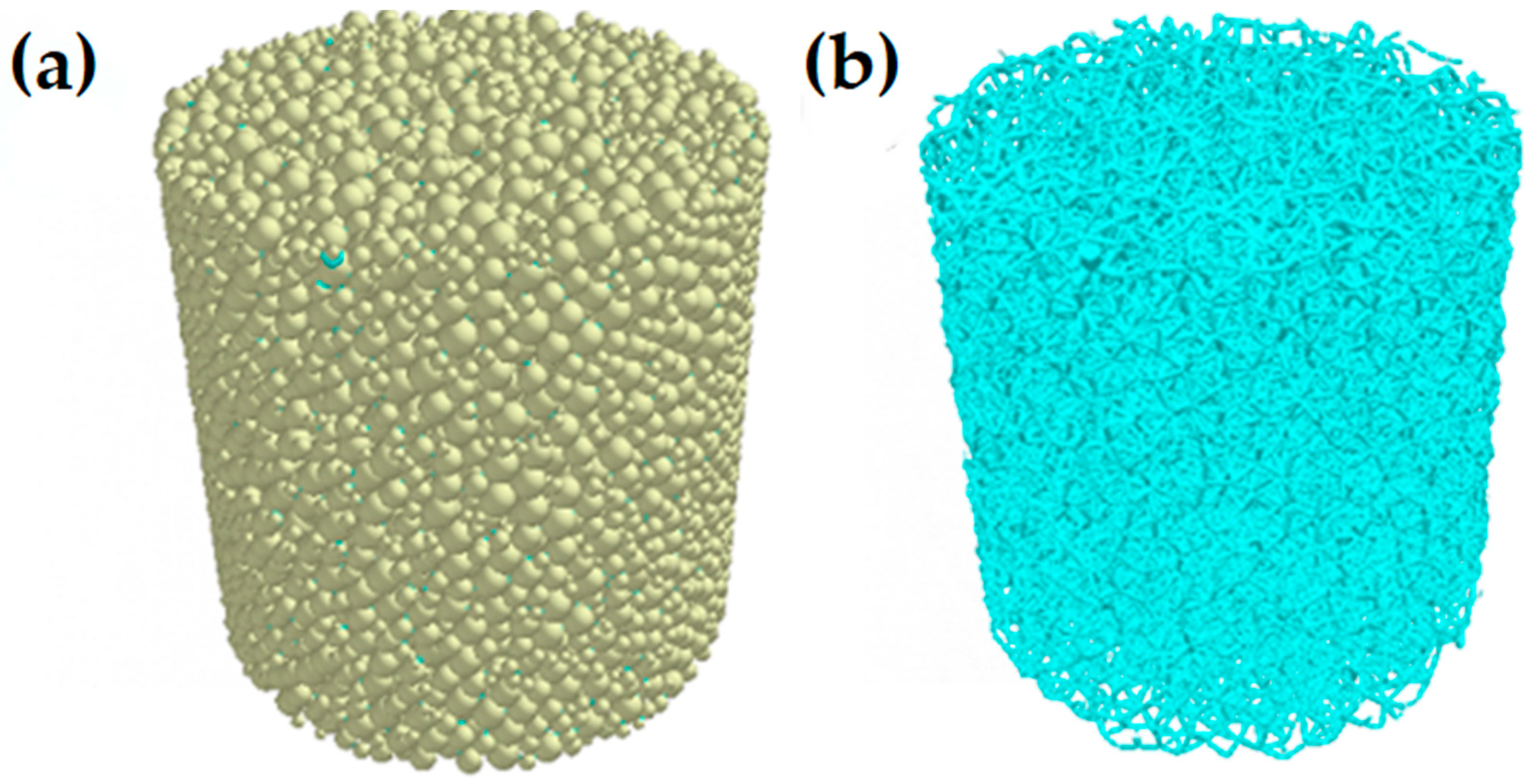
- Simulation models of soil particles were established based on Hertz–Mindlin with the JKR model and the Standard Rolling Friction model. And, the discrete element model of corn straw was established based on the Hertz–Mindlin with bonding contact model, and the relevant parameters of the model were determined.
- (3)
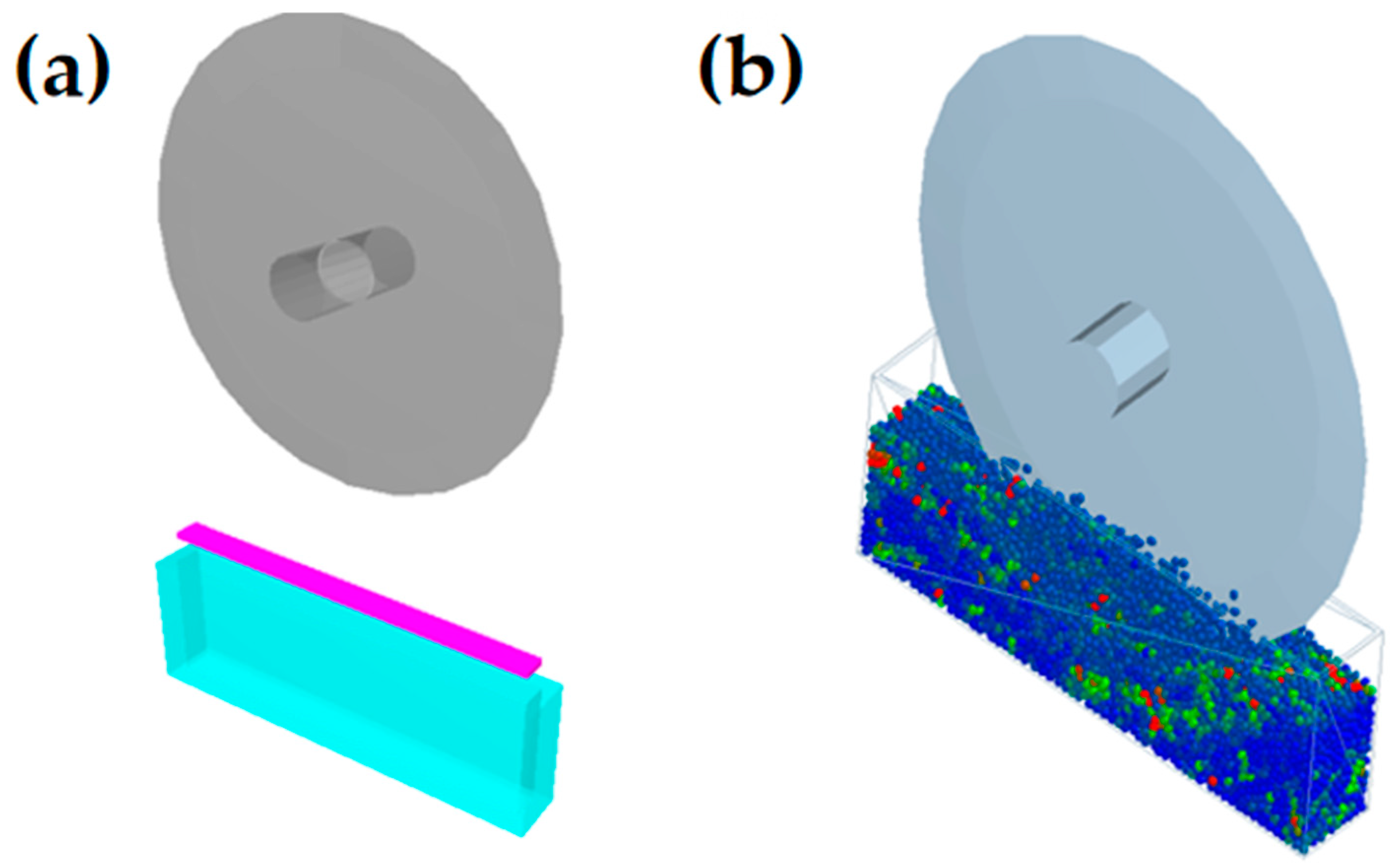
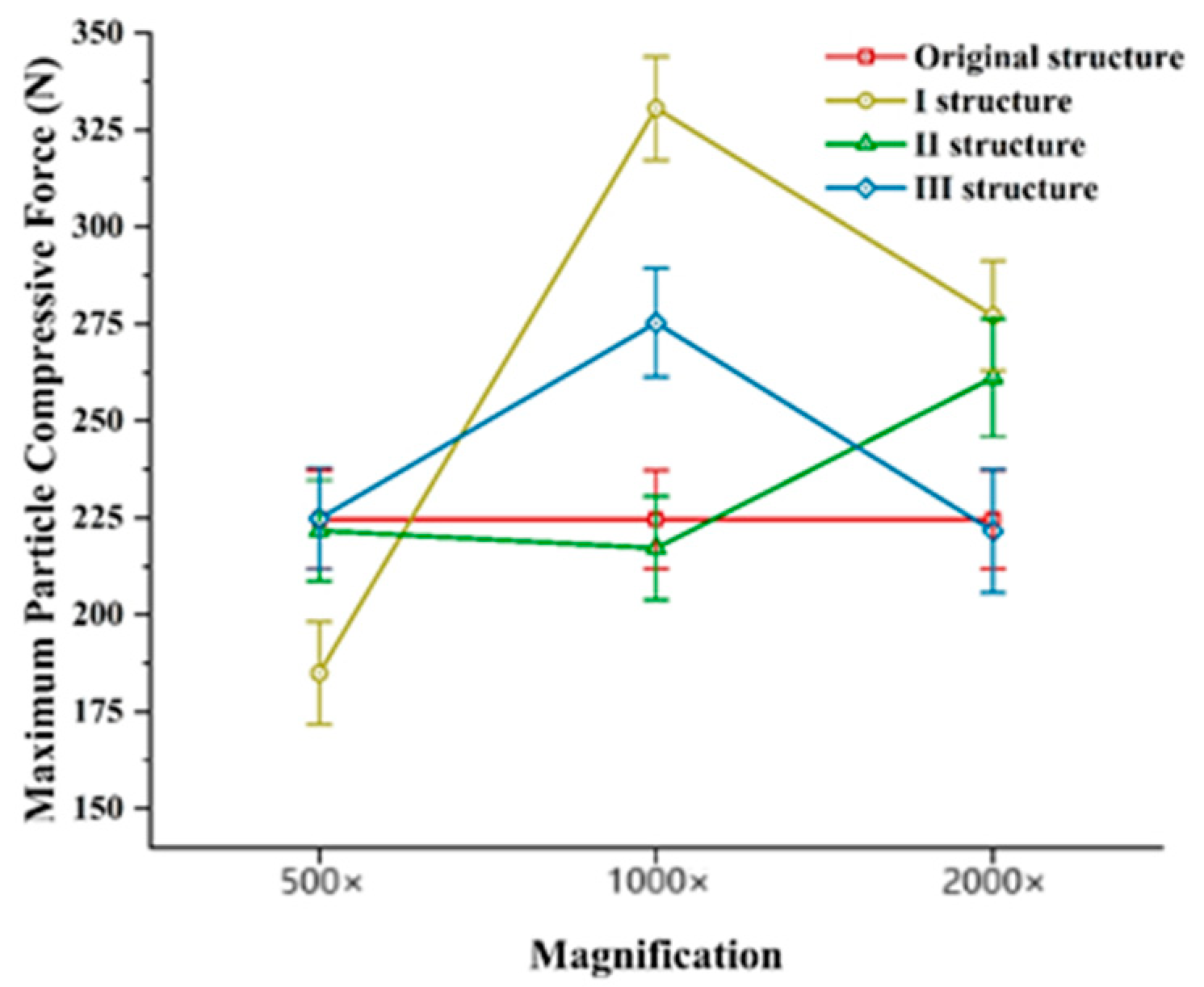
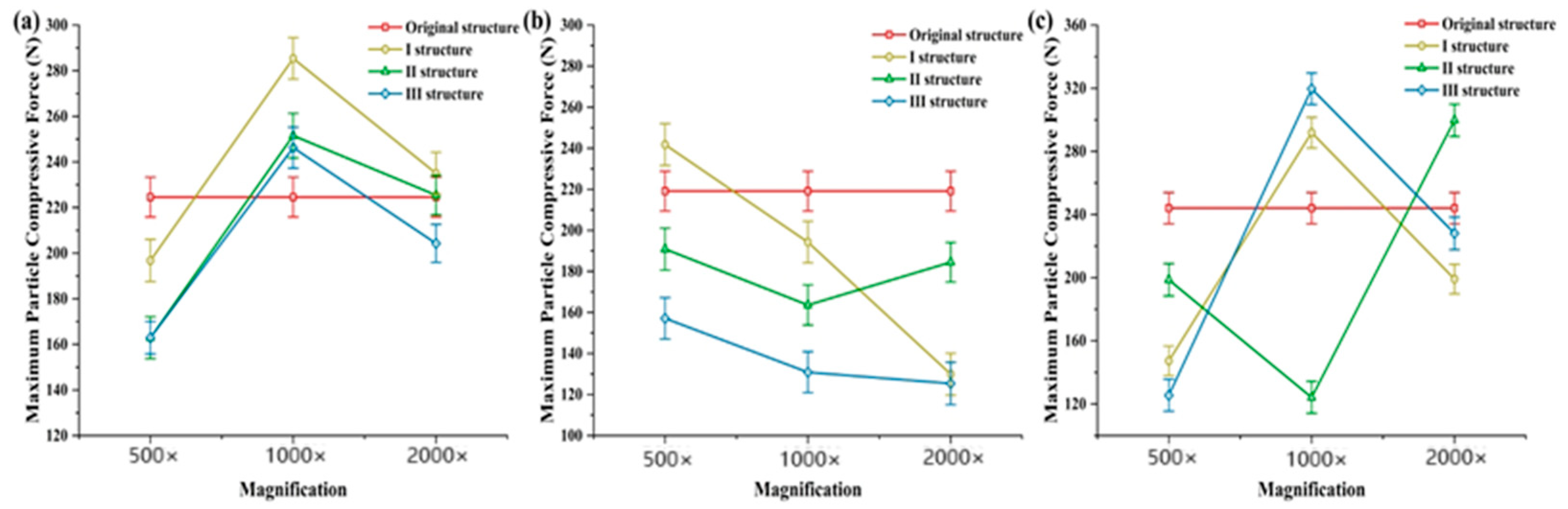
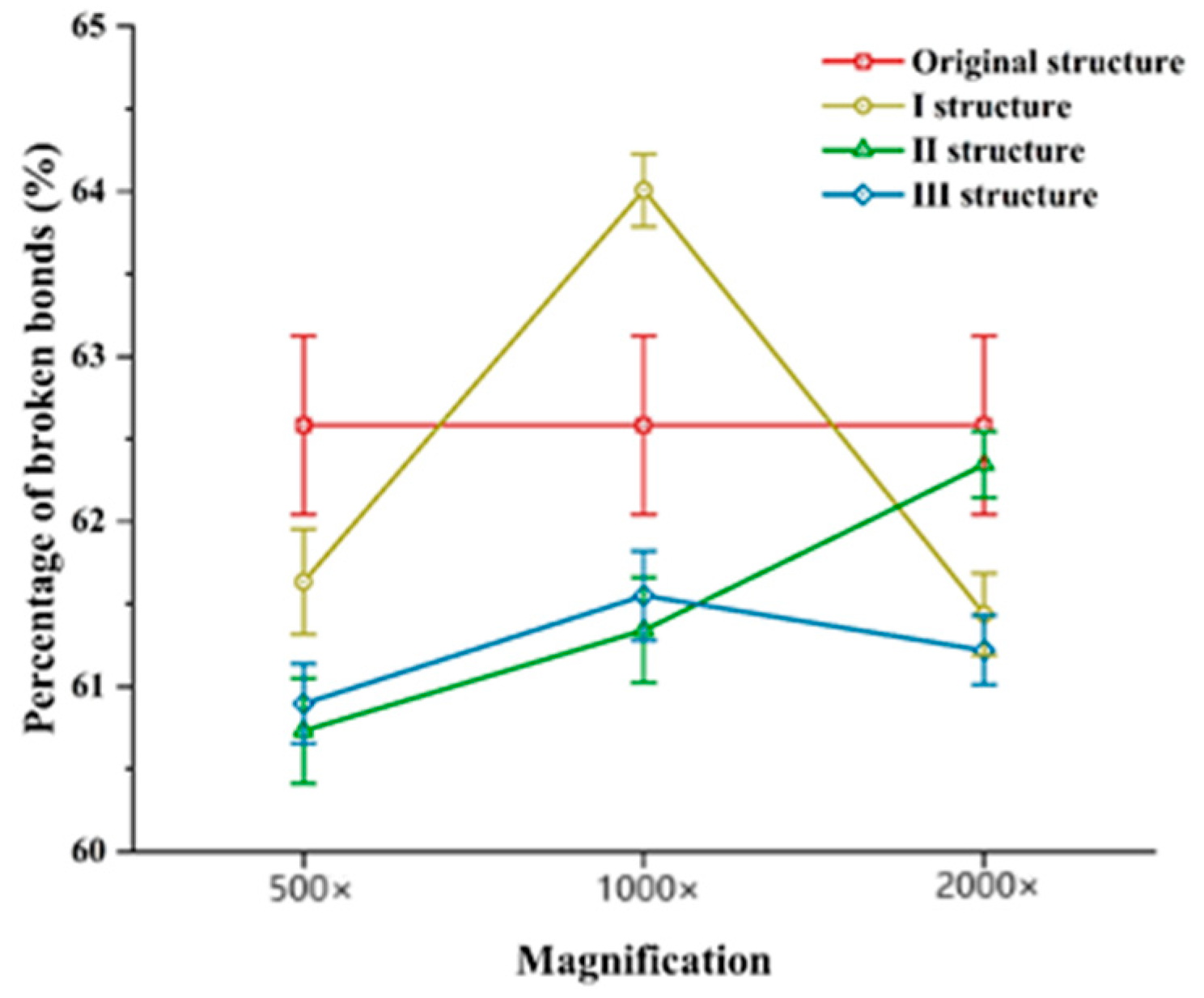
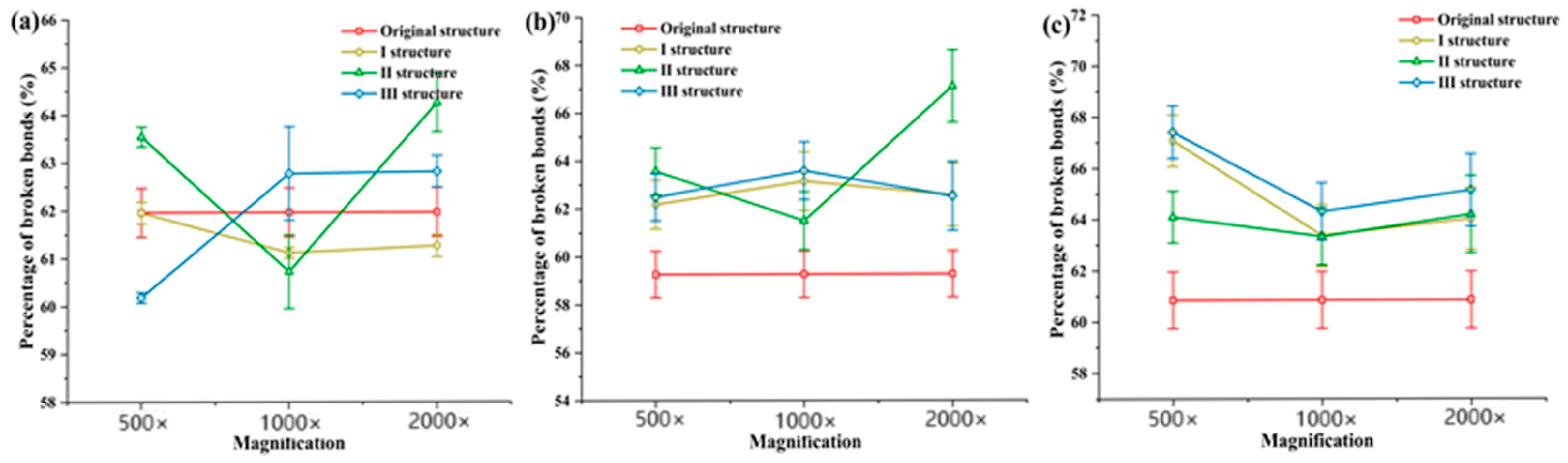
- Bionic furrow opener structure analysis using soil and straw discrete meta-model, cutting, and seeding process simulation; determining the strength of force applied by the structure through the maximum value of force of the soil simulation test; determining the ability of the structure to break the straw through the maximum value of bonding bond breaking percentage of straw simulation test; and obtaining the 1000 magnification of the No. 1 and No. 3 structures, which are more excellent through the test.
- (4)
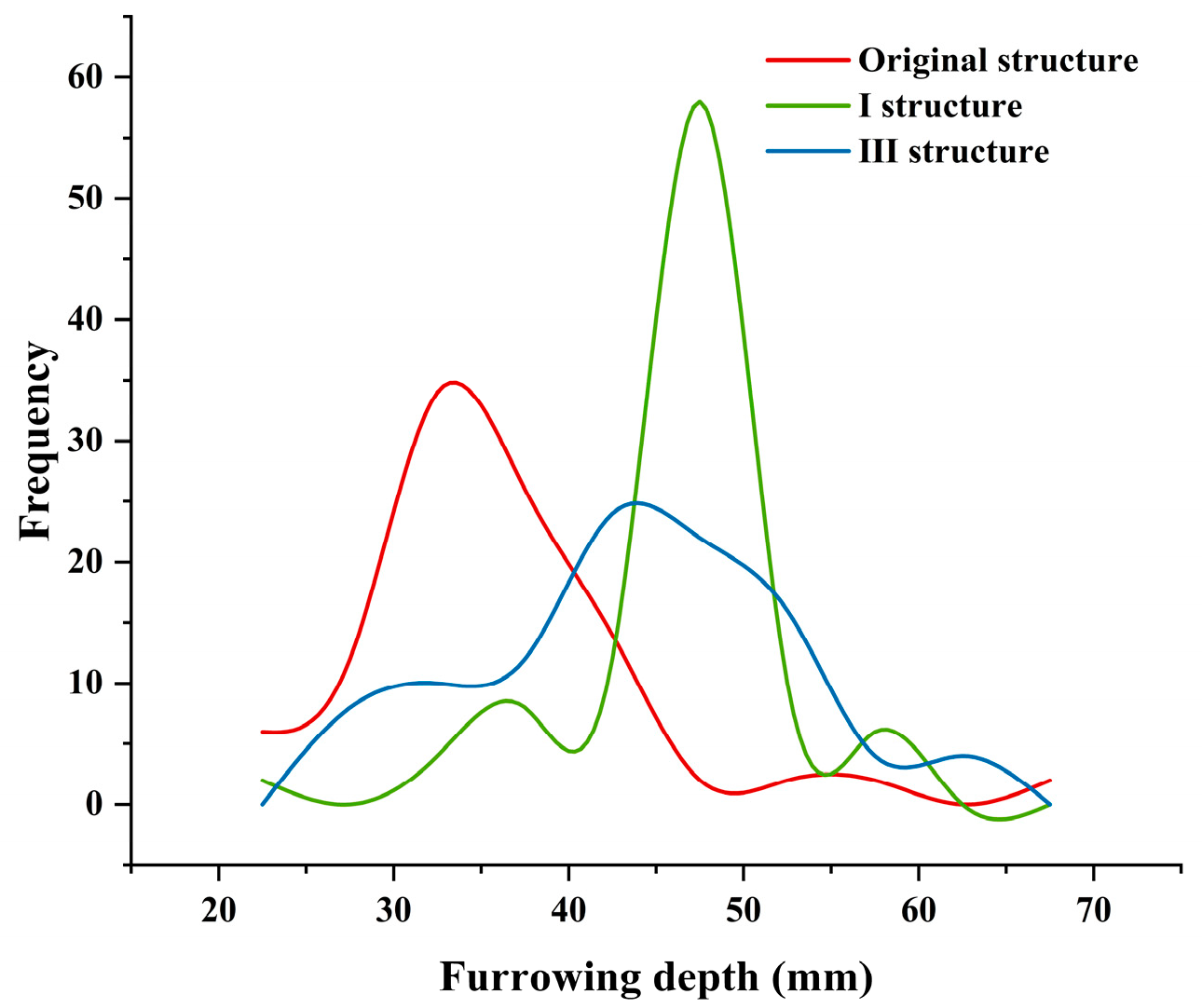
- On the basis of simulation tests, field tests were carried out using a type of planter, and it was determined that the No. 1 structure with 1000 magnification was the optimal structure, and the stability of the structure was improved by 42.10% compared with the original structure.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, H.; Wang, D.; He, X.; Shang, S.; Zhao, Z.; Wang, H.; Tan, Y.; Shi, Y. Study on Plant Crushing and Soil Throwing Performance of Bionic Rotary Blades in Cyperus esculentus Harvesting. Machines 2022, 10, 562. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, T.; Liu, S.; Yan, X.; Zhao, H.; Wu, X.; Zhang, S. Design and Experimental Study of a Bionic Blade for Harvesting the Wild Chrysanthemum Stem. Agriculture 2023, 13, 190. [Google Scholar] [CrossRef]
- Gronenberg, W.; Hölldobler, B. Jaws that snap: Control of mandible movements in the ant Mystrium. J. Insect Physiol. 1998, 44, 241–253. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Y. Research on accurate perception and control system of fertilization amount for corn fertilization planter. Front. Plant Sci. 2022, 13, 1074945. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Xia, J. Design and experiment of the slip-shear cutting combined straw returning blade based on discrete element method. Int. Agric. Eng. J. 2018, 27, 112–119. [Google Scholar]
- Tekeste, M.Z.; Balvanz, L.R. Discrete element modeling of cultivator sweep-to-soil interaction: Worn and hardened edges effects on soil-tool forces and soil flow. J. Terramechanics 2019, 82, 1–11. [Google Scholar] [CrossRef]
- Katinas, E.; Chotěborský, R. Wear modelling of soil ripper tine in sand and sandy clay by discrete element method. Biosyst. Eng. 2019, 188, 305–319. [Google Scholar] [CrossRef]
- Karpman, E.; Kövecses, J. Discrete element modelling for wheel-soil interaction and the analysis of the effect of gravity. J. Terramechanics 2020, 91, 139–153. [Google Scholar] [CrossRef]
- Zhang, C.; Xu, J. Three-dimensional DEM tillage simulation: Validation of a suitable contact model for a sweep tool operating in cohesion and adhesion soil. J. Terramechanics 2023, 108, 59–67. [Google Scholar] [CrossRef]
- Barr, J.B.; Ucgul, M. Simulating the effect of rake angle on narrow opener performance with the discrete element method. Biosyst. Eng. 2018, 171, 1–15. [Google Scholar] [CrossRef]
- Hang, C.; Gao, X. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 168, 73–82. [Google Scholar] [CrossRef]
- Sadek, M.; Chen, Y. Characterization of the shear properties of hemp fiber and core using the discrete element method. Trans. ASABE 2011, 54, 2279–2285. [Google Scholar] [CrossRef]
- Jalali, S.; Aschheim, M.; Hammer, M.; Donahue, K.J.W.D. Seismic Design Factors and Allowable Shears for Strawbale Wall Assemblies. 2013. Available online: https://ecobuildnetwork.org/wp-content/uploads/2024/12/Seismic-Design-Factors-and-Allowable-Shears-for-Strawbale-Wall-Assemblies.September.26.2013.pdf (accessed on 24 September 2024).
- Zhong, J.Q.; Tao, L.M. Determination and interpretation of parameters of double-bud sugarcane model based on discrete element. Comput. Electron. Agric. 2022, 203, 107428. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, H. Discrete element modeling and shear properties of the maize stubble-soil complex. Comput. Electron. Agric. 2023, 204, 107519. [Google Scholar] [CrossRef]
- Zhang, T.; Zhao, M. A discrete element method model of corn stalk and its mechanical characteristic parameters. BioResources 2020, 15, 9337. [Google Scholar] [CrossRef]
- Fang, M.; Yu, Z. Friction coefficient calibration of corn stalk particle mixtures using Plackett-Burman design and response surface methodology. Powder Technol. 2022, 396, 731–742. [Google Scholar] [CrossRef]
- Fallahi, S.; Raoufat, M.H. Row-crop planter attachments in a conservation tillage system: A comparative study. Soil Tillage Res. 2008, 98, 27–34. [Google Scholar] [CrossRef]
- Zhao, H.; Huang, Y. Applications of discrete element method in the research of agricultural machinery: A review. Agriculture 2021, 11, 425. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X. Determination and verification of parameters for the discrete element modelling of single disc covering of flexible straw with soil. Biosyst. Eng. 2023, 233, 151–167. [Google Scholar] [CrossRef]
- Zhu, H.B.; Qian, C.; Bai, L.Z.; Li, H.; Mu, D.L.; Li, J.J. Optimization of discrete element model of corn stalk based on Plackett-Burman design and response surface methodology. J. China Agric. Univ. 2021, 26, 221–231. [Google Scholar]
- Thielke, L.; Kemper, S. Simulation of agricultural processes using the discrete element method. Mech. Agric. Conserv. Resour. 2015, 61, 10–13. [Google Scholar]
- Johnson, K.L.; Kendall, K.; Roberts, A.A.D. Surface energy and the contact of elastic solids. Proc. R. Soc. Lond. A Math. Phys. Sci. 1971, 324, 301–313. [Google Scholar] [CrossRef]
- Potyondy, D.O.; Cundall, P.A. A bonded-particle model for rock. Int. J. Rock Mech. Min. Sci. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Jiang, M.; Zhang, A.; Shen, Z. Granular soils: From DEM simulation to constitutive modeling. Acta Geotech. 2020, 15, 1723–1744. [Google Scholar] [CrossRef]
- Mousaviraad, M.; Tekeste, M.Z. Systematic calibration and validation approach for discrete element method (DEM) modeling of corn under varying moisture contents (MC). J. ASABE 2024, 67, 259–274. [Google Scholar] [CrossRef]
- Coskun, M.B.; Yalcin, I.; Ozarslan, C. Physical properties of sweet corn grain (zea mays saccharata sturt.). J. Food Eng. 2006, 74, 523–528. [Google Scholar] [CrossRef]
- USA, American Society of Agricultural Engineers. Compression Test of Food Materials of Convex Shape, ASAE Standards 2002: Standards Engineering Practices; American Society of Agricultural Engineers: St. Joseph, MI, USA, 2002; Volume 49, pp. 592–599. [Google Scholar]
- Wang, X.M.; Yu, J.Q.; Lv, F.Y.; Wang, Y.; Fu, W. A multi-sphere based modelling method for maize grain assemblies. Adv. Powder Technol. 2017, 28, 584–595. [Google Scholar] [CrossRef]
- Wang, L.J.; Zhou, W.X.; Ding, Z.J.; Li, X.X.; Zhang, C.G. Experimental determination of parameter effects on the coefficient of restitution of differently shaped maize in three-dimensions. Powder Technol. 2015, 284, 187–194. [Google Scholar] [CrossRef]
- Hlosta, J.; Zurovec, D.; Rozbroj, J.; Ramirez-Gomez, A.; Necas, J.; Zegzulka, J. Experimental determination of particle-particle restitution coefficient via double pendulum method. Chem. Eng. Res. Des. 2018, 135, 222–233. [Google Scholar] [CrossRef]
- Gonzalez-Montellano, C.; Fuentes, J.M.; Ayuga-Tellez, E.; Ayuga, F. Determination of the mechanical properties of maize grains and olives required for use in dem simulations. J. Food Eng. 2012, 111, 553–562. [Google Scholar] [CrossRef]
- Yan, D.X.; Yu, J.Q.; Wang, Y.; Zhou, L.; Yu, Y.J. A general modelling method for soybean grains based on the discrete element method. Powder Technol. 2020, 372, 212–226. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, J.Q.; Wang, Y.; Yan, D.X.; Yu, Y.J. A study on the modelling method of maize-grain particles based on the discrete element method. Powder Technol. 2020, 374, 353–376. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Density of soil, kg/m3 | 1300 |
| Permissible soil weight, kg/m3 | 1028 |
| Poisson’s ratio for soil | 0.37 |
| Shear modulus of soil, Pa | 1 × 108 |
| Coefficient of recovery between soils | 0.336 |
| Coefficient of static friction between soils | 0.212 |
| Coefficient of rolling friction between soils | 0.417 |
| Coefficient of recovery between soil and 45 steel | 0.112 |
| Coefficient of static friction between soil and 45 steel | 0.252 |
| Coefficient of rolling friction between soil and 45 steel | 0.157 |
| Parameters | Value |
|---|---|
| Straw density, kg/m3 | 470 |
| Poisson’s ratio for straw | 0.4 |
| Shear modulus of straw, Pa | 1.7 × 106 |
| Coefficient of recovery between straw and 45 steel | 0.663 |
| Coefficient of static friction between straw and 45 steel | 0.226 |
| Coefficient of rolling friction between straw and 45 steel | 0.119 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Wang, X.; Yang, S.; Yu, Y.; Xu, T.; Li, C. Design and Testing of a Bionic Seed Planter Furrow Opener for Gryllulus Jaws Based on the Discrete Element Method (DEM). Processes 2024, 12, 2834. https://doi.org/10.3390/pr12122834
Jiang X, Wang X, Yang S, Yu Y, Xu T, Li C. Design and Testing of a Bionic Seed Planter Furrow Opener for Gryllulus Jaws Based on the Discrete Element Method (DEM). Processes. 2024; 12(12):2834. https://doi.org/10.3390/pr12122834
Chicago/Turabian StyleJiang, Xinming, Xiaoxuan Wang, Senbo Yang, Yajun Yu, Tianyue Xu, and Chunrong Li. 2024. "Design and Testing of a Bionic Seed Planter Furrow Opener for Gryllulus Jaws Based on the Discrete Element Method (DEM)" Processes 12, no. 12: 2834. https://doi.org/10.3390/pr12122834
APA StyleJiang, X., Wang, X., Yang, S., Yu, Y., Xu, T., & Li, C. (2024). Design and Testing of a Bionic Seed Planter Furrow Opener for Gryllulus Jaws Based on the Discrete Element Method (DEM). Processes, 12(12), 2834. https://doi.org/10.3390/pr12122834