


Methods of Partial Differential Equation Discovery: Application to Experimental Data on Heat Transfer Problem
 ,
,
Abstract
:1. Introduction
- (1)
- Experimental data inherently contains noise.
- (2)
- Studying the spatial distribution of a parameter (e.g., temperature) requires the placement of sensors, the numbers of which are typically limited. Moreover, a sensor can generate measurements at a high frequency, resulting in a large volume of data. As a result, experimental data have low spatial resolution and high temporal resolution.
- (3)
- A common way to introduce noise in synthetic data is through a multiplicative method, where the relative errors of all measurements are the same. In this case, each evaluation contains an equal amount of information, and all data contribute to model reconstruction. However, in actual experiments, noise is often additive and can reach several hundred percent for low signal levels.
- (i)
- Arbitrary geometry, including cylindrical/spherical shapes. Most studies on equation reconstruction, such as the Burgers equation or convection–diffusion equation, have focused on one-dimensional planar setups.
- (ii)
- The possibility of simultaneously having first and second derivatives concerning time in the equation. Existing works only consider one of the time derivatives a priori.
- (iii)
- The number of grid points can be smaller than expected for standard machine learning algorithms (e.g., only five spatial points are available for measurements due to the hardware restrictions).
2. Algorithms
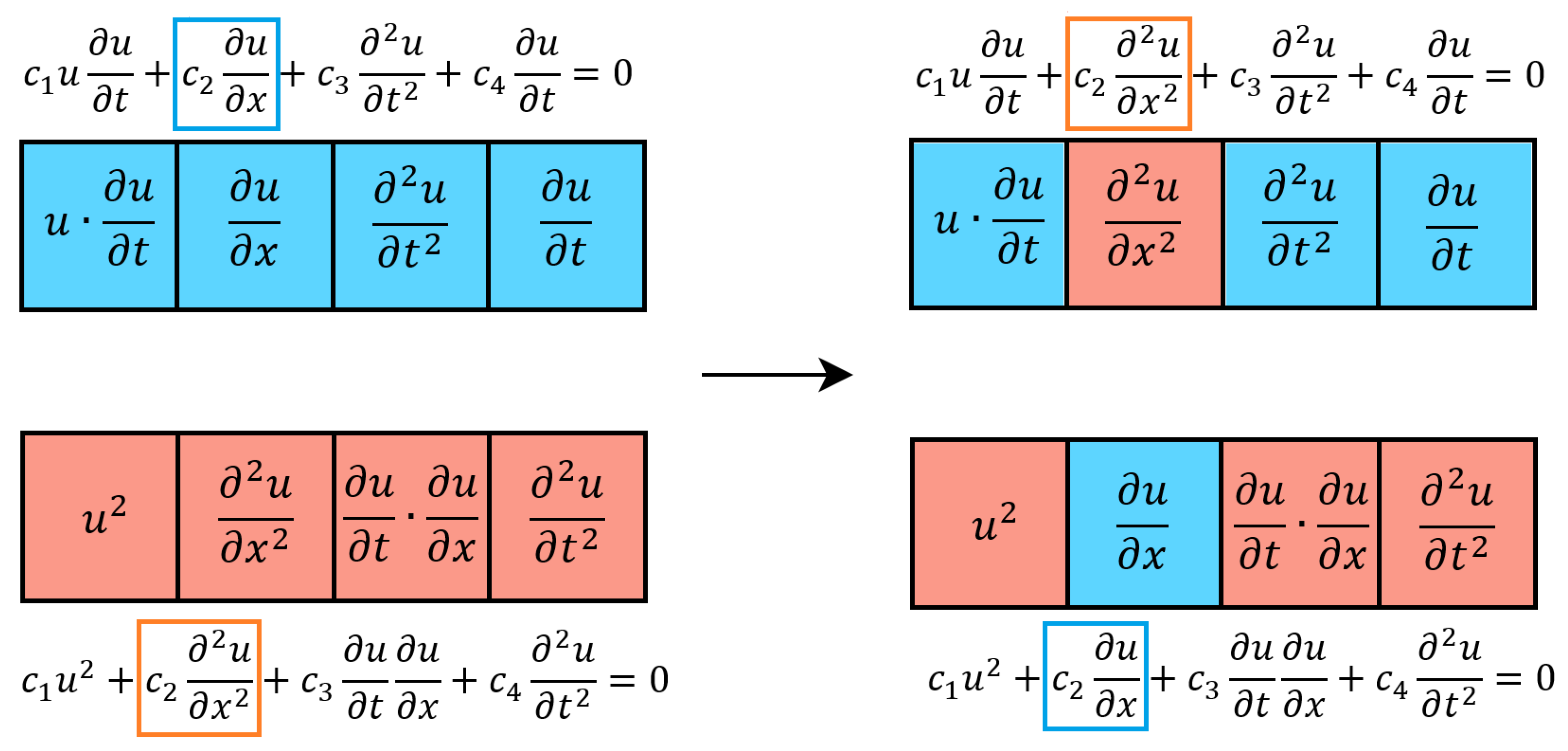
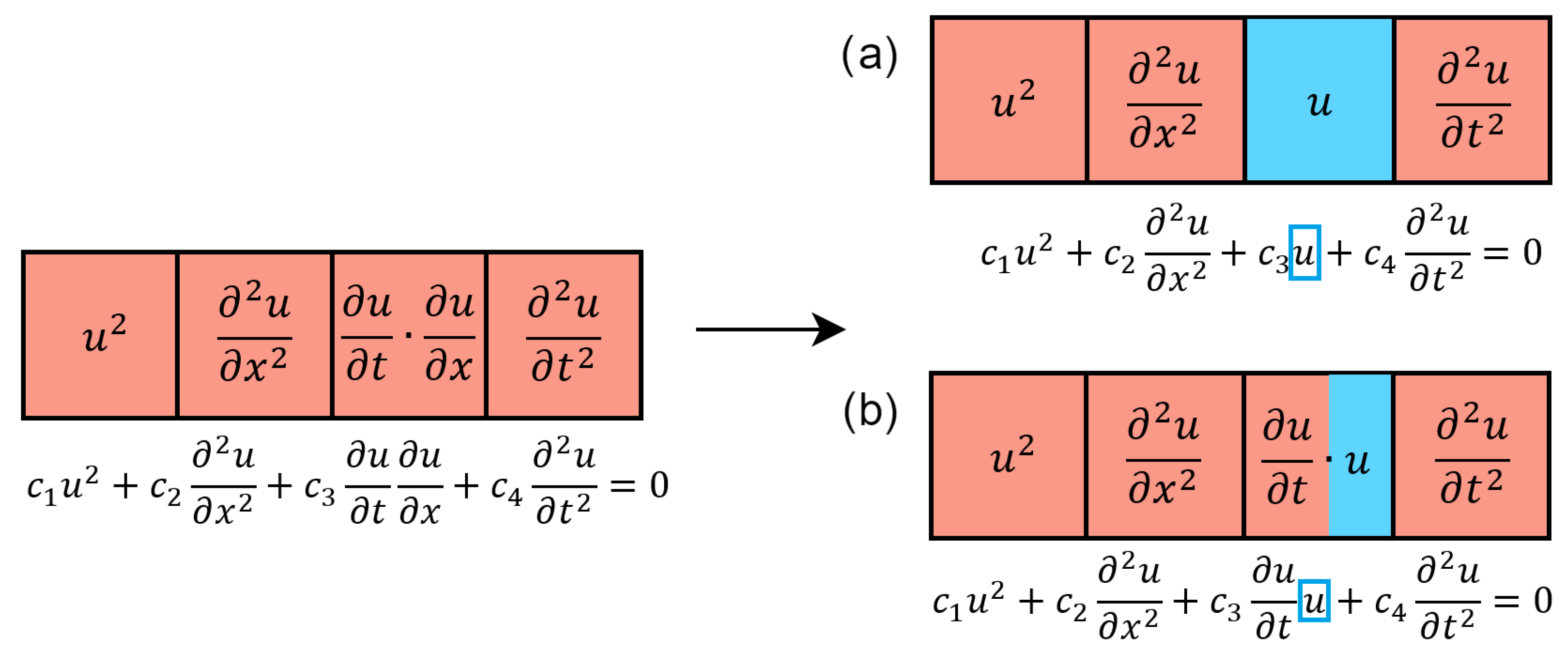
2.1. Evolutionary Optimization Algorithm
2.2. Best Subset Selection Algorithm
2.3. Adaptive Single-Objective Optimization
- LHS Sampling: Latin Hypercube Sampling is used for the Kriging construction. The new LHS generated after the domain reduction retains all the existing design points between the new boundaries.
- Kriging Generation: A response surface is created for each output, based on the current LHS and, therefore, on the current domain boundaries.
- NLPQL Algorithm: NLPQL is run on the current Kriging response surface to find the potential candidates. Multiple NLPQL processes run at the same time, starting from different starting points and thus providing different candidates.
- 4.
- Candidate Point Validation: All obtained candidates are either validated or not, based on the Kriging error predictor. The candidate point is checked to see if further refinement of the Kriging surface changes the validation of this point. A candidate is considered acceptable if, according to this error prediction, there are no points that cast doubt on it. If the quality of the candidate is questioned, the domain bounds are reduced; otherwise, the candidate is considered a verification point.
- 5.
- Convergence and Stop Criteria: The optimization converges when the found candidates are stable. However, there are three stopping criteria that can stop the algorithm: the maximum number of estimates, the maximum number of domain reductions, and the convergence tolerance.
3. Data
3.1. Synthetic Data
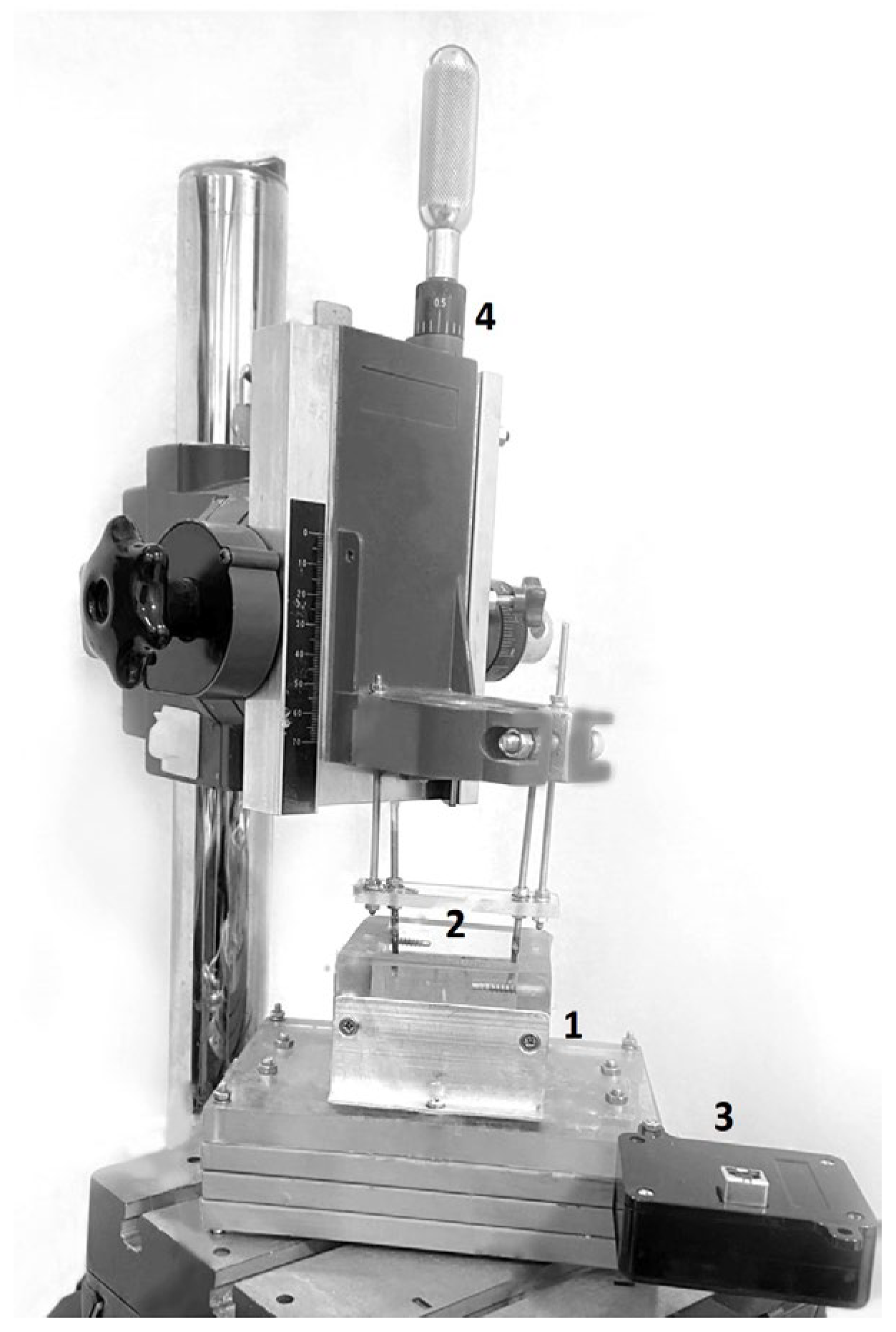
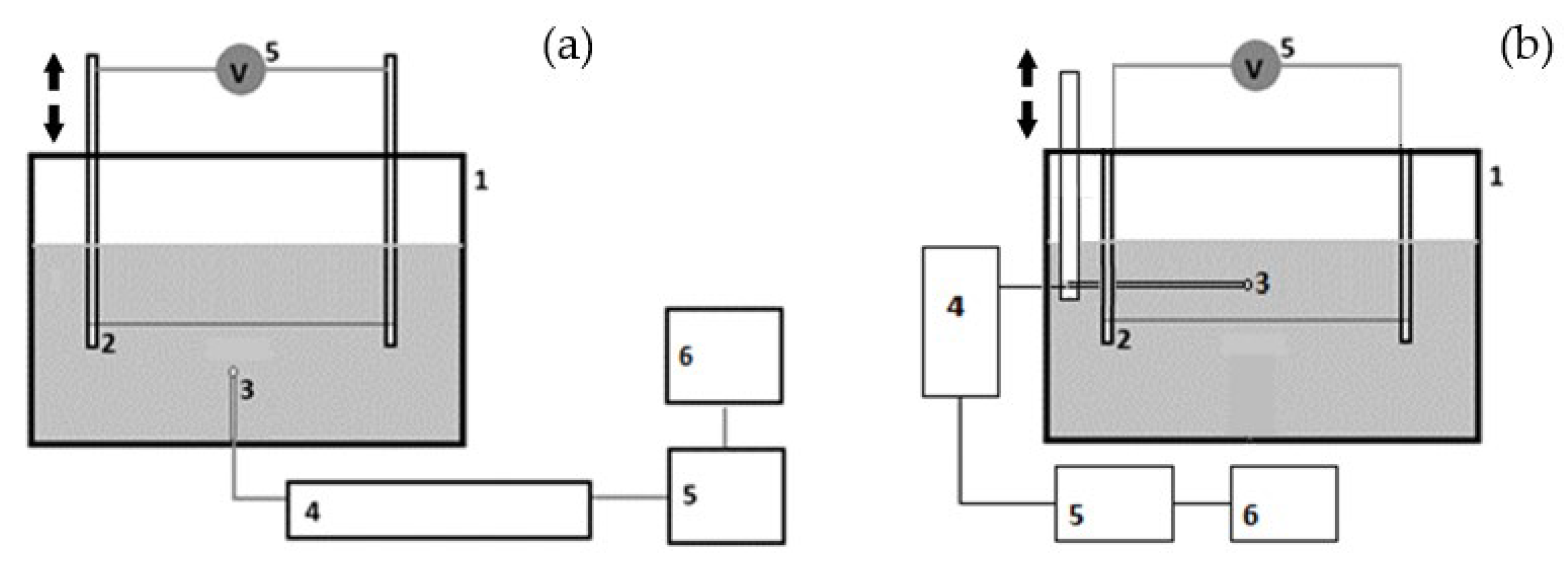
3.2. Experimental Setup and Data
4. Results
4.1. Evolutionary Optimization Algorithm
4.2. Best Subset Selection Algorithm
4.3. Adaptive Single-Objective Optimization
5. Discussion
- (1)
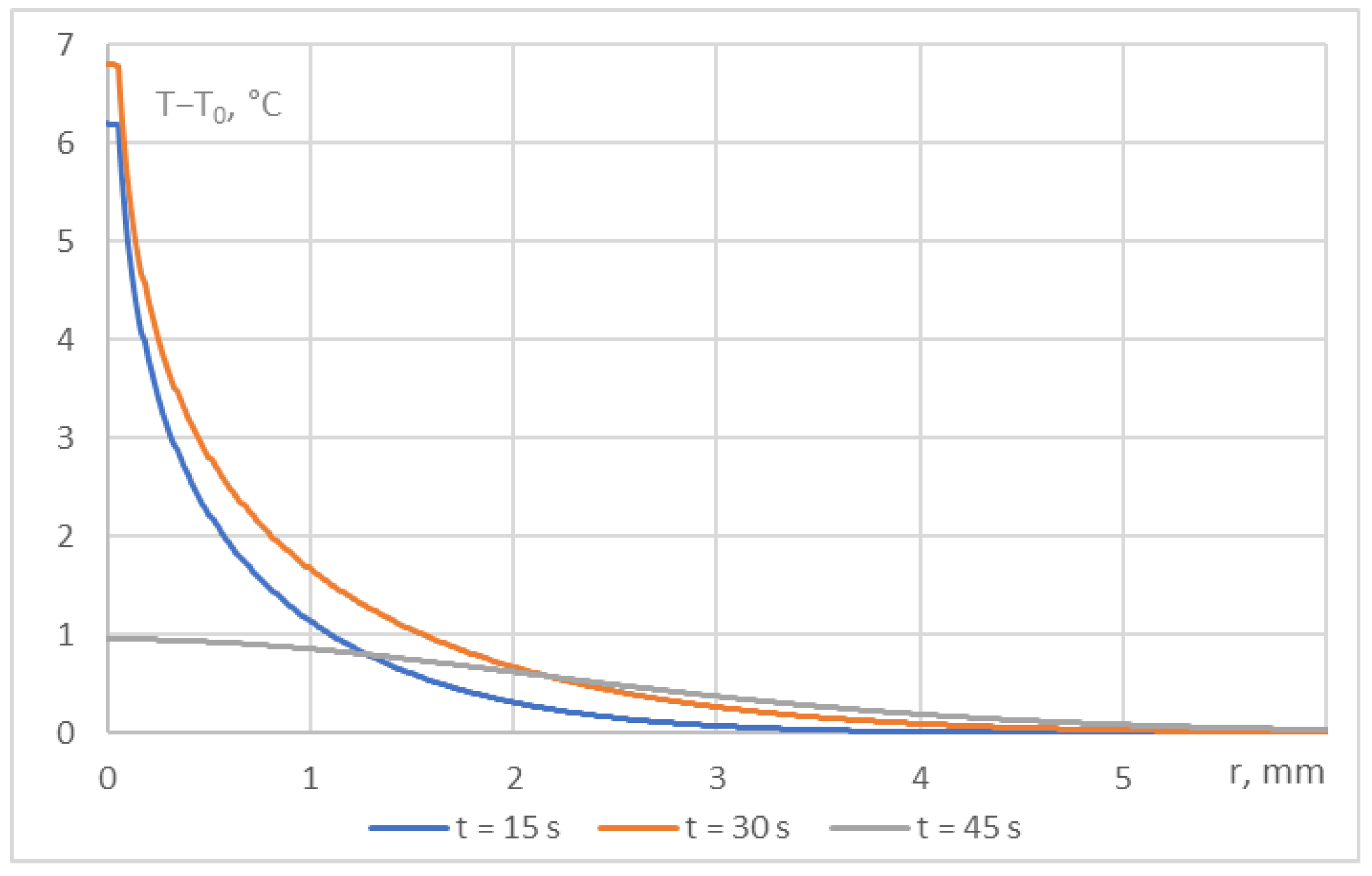
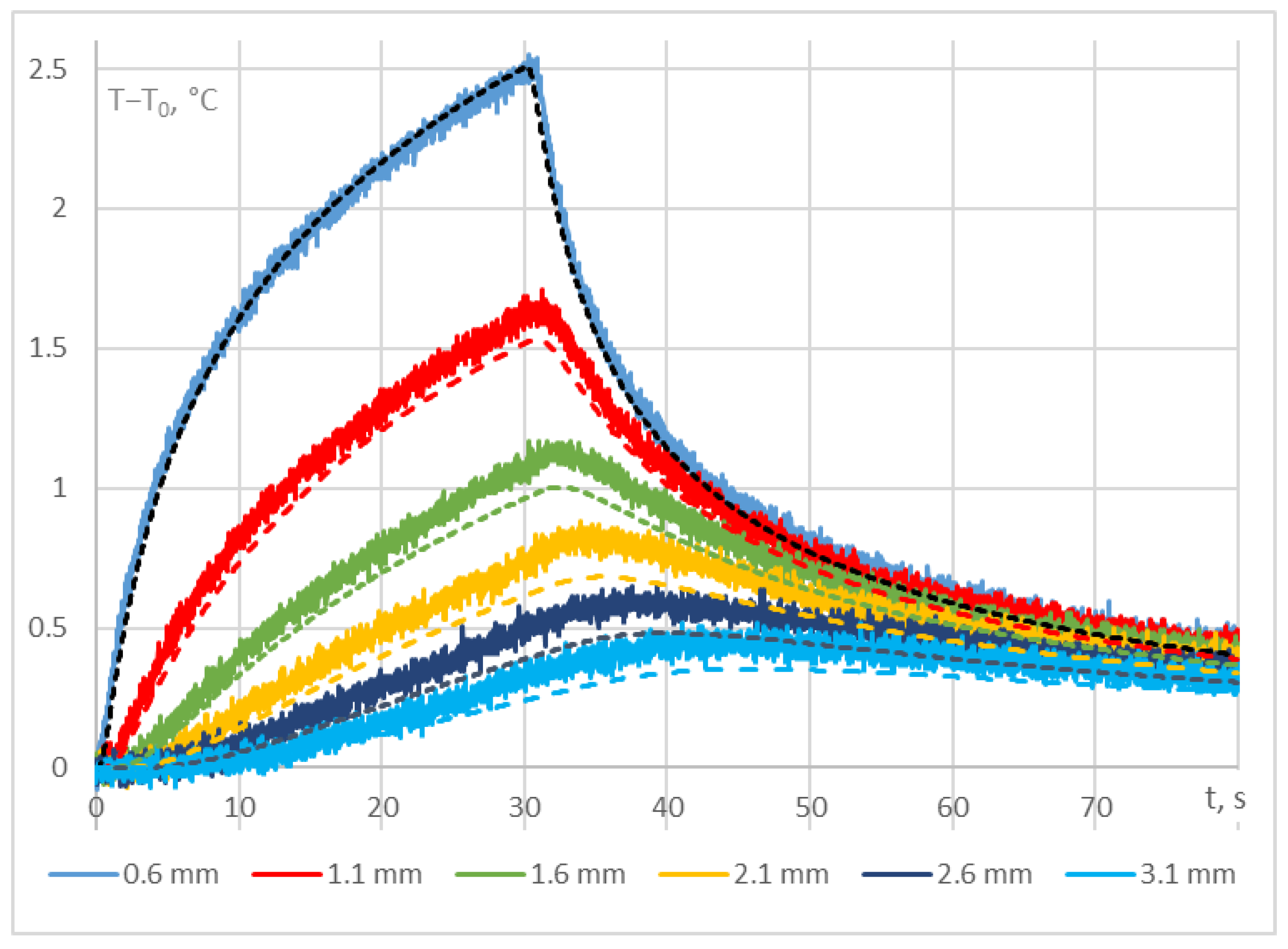
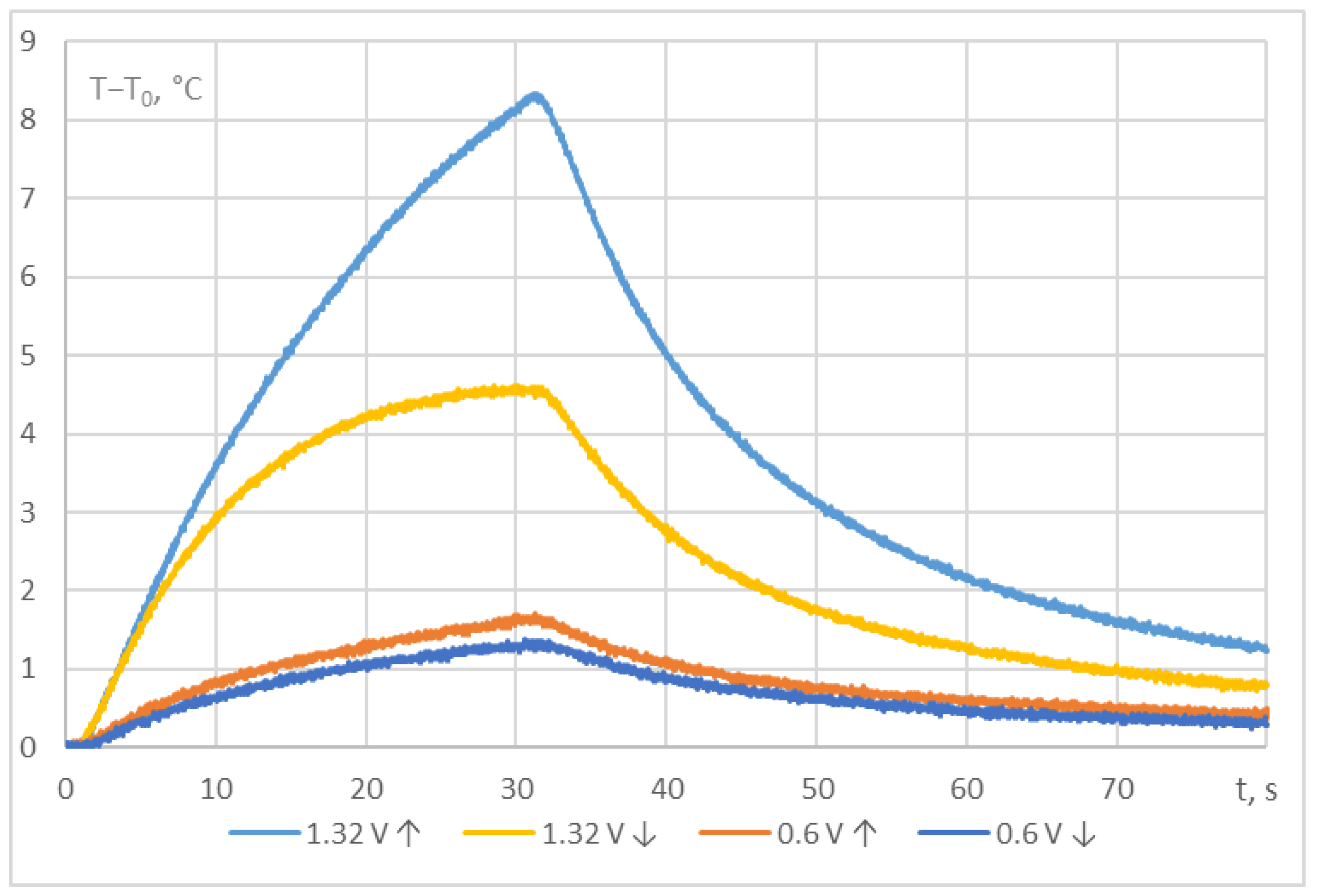
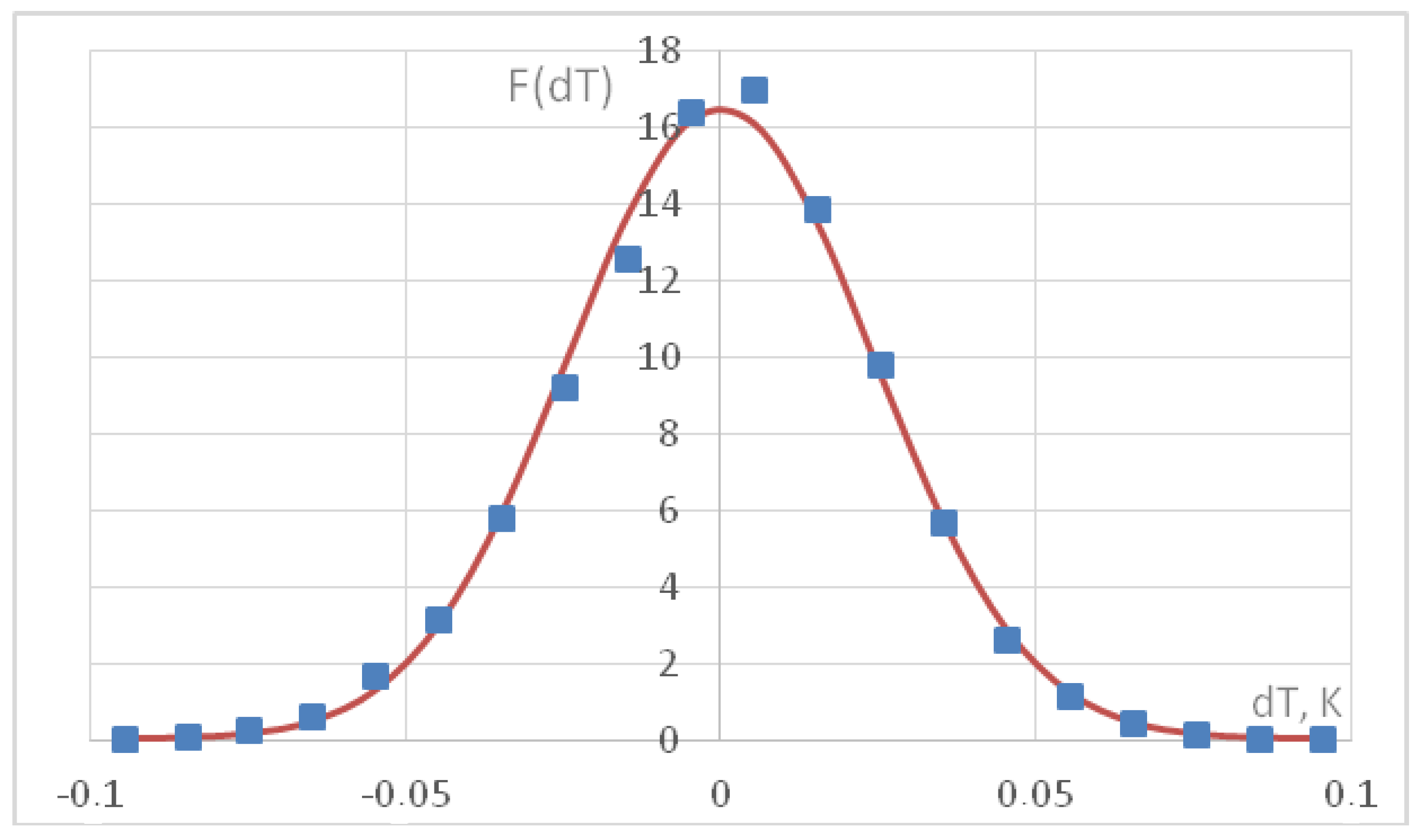
- Temperature measurements in the viscous liquid (glycerol) were conducted in pulse mode. The maximum temperature observed at the nearest measurement point to the wire was approximately 2.5 °C for the first mode and around 7.5 °C for the second mode. The measurement error exhibited additive Gaussian noise with a standard deviation of 0.024 °C. Thus, the noise level was approximately 1% relative to the maximum temperature for the first case and 0.2% for the second case. The error measurement relative to the maximum observed value is more illustrative than related to the mean value used in the most papers.
- (2)
- The spatial data are highly sparse. The main measurements were only taken at six points located vertically above the wire.
- (3)
- For the second heating mode, characterized by higher power, the conducted measurements clearly indicate the presence of convective motion in the medium.
6. Conclusions
- (1)
- two algorithms for processing sparse and noisy data are proposed, based on (i) data filtering and subsequent interpolation in the entire domain using a neural network, and (ii) selection of space and time steps within the procedure of data numerical differentiation;
- (2)
- the algorithms are implemented in two methods for recovering equations based on (i) a genetic algorithm with evolutionary optimization and (ii) the best subset selection procedure that showcases the capabilities of established sparse regression methods;
- (3)
- to verify the methods, an experiment was carried out on pulsed heating of a viscous liquid by a submerged heat source; natural noisy data on temperature changes at only six spatial points were obtained;
- (4)
- for the first time, on the same experimental data, the efficiency of the genetic algorithm, the best subset selection procedure, and the standard adaptive single-objective optimization algorithm of the Ansys package have been compared. The genetic algorithm and BSS procedure made it possible to correctly restore the structure of the equation in the polar coordinate system and to determine the thermal diffusivity coefficient for a noise level of up to 1% of the amplitude temperature value. The ASO algorithm, firstly, assumes prior knowledge of equation structure, and secondly, the accuracy of reconstructing the thermal diffusivity turns out to be slightly worse in relation to the results of applying the genetic algorithm;
- (5)
- for the first time, the possibility of indicating the process of convection of a viscous liquid using methods for reconstructing an equation in the form of a PDE was analyzed for highly sparse temperature data obtained for points along only one straight line. The proposed approach can be used to determine the onset of convection when studying the natural convection of liquids;
- (6)
- the capacity of methods for the discovery of equations containing higher-order time derivatives has been extended.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; SIAM: Philadelphia, PA, USA, 2005. [Google Scholar] [CrossRef]
- Kirsch, A. An Introduction to the Mathematical Theory of Inverse Problems, 2nd ed.; Springer: New York, NY, USA, 2013; 310p. [Google Scholar] [CrossRef]
- Beck, J.V.; Blackwell, B.F.; St. Clair, C.R. Inverse Heat Conduction: Ill-Posed Problems; John Wiley & Sons Ltd.: Chichester, UK, 1985. [Google Scholar]
- Vatulyan, A.O. Inverse Coefficient Problems in Mechanics; Fizmatlit: Moscow, Russia, 2019; 272p. (In Russian) [Google Scholar]
- Yang, J.P.; Li, H.-M. Recovering Heat Source from Fourth-Order Inverse Problems by Weighted Gradient Collocation. Mathematics 2022, 10, 241. [Google Scholar] [CrossRef]
- Maslyaev, M.; Hvatov, A.; Kalyuzhnaya, A. Discovery of the data-driven models of continuous metocean process in form of nonlinear ordinary differential equations. Procedia Comput. Sci. 2020, 178, 18–26. [Google Scholar] [CrossRef]
- Somacal, A.; Barrera, Y.; Boechi, L.; Jonckheere, M.; Lefieux, V.; Picard, D.; Smucler, E. Uncovering differential equations from data with hidden variables. arXiv 2020, arXiv:2002.02250v2. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Liu, Y.; Sun, H. Physics-informed learning of governing equations from scarce data. Nat. Commun. 2021, 12, 6136. [Google Scholar] [CrossRef]
- Bykov, N.Y.; Obraztsov, N.V.; Hvatov, A.A.; Maslyaev, M.A.; Surov, A.V. Hybrid modeling of gas-dynamic processes in AC plasma torches. Mater. Phys. Mec. 2022, 50, 287–303. [Google Scholar] [CrossRef]
- Xu, H.; Zeng, J.; Zhang, D. Discovery of Partial Differential Equations from Highly Noisy and Sparse Data with Physics-Informed Information Criterion. Research 2023, 6, 0147. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, M.; Lipson, H. Distilling free-form natural laws from experimental data. Science 2009, 324, 81–85. [Google Scholar] [CrossRef]
- Li, W.; Dong, Y.; Wang, J.; Zhang, Y.; Zhang, X.; Liu, X. Experimental study on enhanced heat transfer of nanocomposite phase change materials. Phase Transit. 2019, 92, 285–301. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, K.; Medina, M.A.; He, J. An experimental method for validating transient heat transfer mathematical models used for phase change materials (PCMs) calculations. Phase Transit. 2014, 87, 541–558. [Google Scholar] [CrossRef]
- Rathod, M.K.; Banerjee, J. Experimental Investigations on Latent Heat Storage Unit using Paraffin Wax as Phase Change Material. Exp. Heat Transf. 2014, 27, 40–55. [Google Scholar] [CrossRef]
- Duluc, M.-C.; Xin, S.; Le Quéré, P. Transient natural convection and conjugate transients around a line heat source. Int. J. Heat Mass Transf. 2003, 46, 341–354. [Google Scholar] [CrossRef]
- Duluc, M.-C.; Xin, S.; Lusseyran, F.; Le Quéré, P. Numerical and experimental investigation of laminar free convection around a thin wire: Long time scalings and assessment of numerical approach. Int. J. Heat Fluid Flow 2008, 29, 1125–1138. [Google Scholar] [CrossRef]
- Manukhin, B.G.; Gusev, M.E.; Kucher, D.A.; Chivilikhin, S.A.; Andreeva, O.V. Optical diagnostics of the process of free liquid convection. Opt. Spectrosc. 2015, 119, 392–397. [Google Scholar] [CrossRef]
- Duluc, M.-C.; Fraigneau, Y.C. Effect of frequency on natural convection flows induced by a pulsating line-heat source. Int. J. Therm. Sci. 2017, 117, 342–357. [Google Scholar] [CrossRef]
- Jiang, Y.; Nie, B.; Zhao, Y.; Carmeliet, J.; Xu, F. Scaling of buoyancy-driven flows on a horizontal plate subject to a ramp heating of a finite time. Int. J. Heat Mass Transf. 2021, 171, 121061. [Google Scholar] [CrossRef]
- Samarskii, A.A.; Vabishchevich, P.N. Computational Heat Transfer, Volume 1: Mathematical Modelling, 1st ed.; John Wiley & Sons Ltd.: Chichester, UK, 1995. [Google Scholar]
- Cattaneo, C.; Kampé de Fériet, J. Sur une Forme de L’équation de la Chaleur Eliminant le Paradoxe D’une Propagation Instantanée. Comptes Rendus Hebdomadaires des Séances de L’academie des Sciences; Gauthier-Villars: Paris, France, 1958; pp. 431–433. [Google Scholar]
- Zhmakin, A.I. Heat Conduction Beyond the Fourier Law. Tech. Phys. 2021, 66, 1–22. [Google Scholar] [CrossRef]
- Cai, S.; Wang, Z.; Wang, S.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks for heat transfer problems. J. Heat Transf. 2021, 143, 060801. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, X.; Chen, X.; Xu, C.; Liu, J. PINN-FFHT: A physics-informed neural network for solving fluid flow and heat transfer problems without simulation data. Int. J. Mod. Phys. C 2022, 33, 2250166. [Google Scholar] [CrossRef]
- Oommen, V.; Srinivasan, B. Solving inverse heat transfer problems without surrogate models: A fast, data-sparse, physics informed neural network approach. J. Comput. Inf. Sci. Eng. 2022, 22, 041012. [Google Scholar] [CrossRef]
- Cai, S.; Wang, Z.; Chryssostomidis, C.; Karniadakis, G.E. Heat transfer prediction with unknown thermal boundary conditions using physics-informed neural networks. Fluids Eng. Div. Summer Meet. 2020, 83730, V003T05A054. [Google Scholar] [CrossRef]
- Jin, G.; Xing, H.; Zhang, R.; Guo, Z.; Liu, J. Data-driven discovery of governing equations for transient heat transfer analysis. Comput. Geosci. 2022, 26, 613–631. [Google Scholar] [CrossRef]
- Fasel, U.; Kutz, J.N.; Brunton, B.W.; Brunton, S.L. Ensemble-SINDy: Robust sparse model discovery in the low-data, high-noise limit, with active learning and control. Proc. R. Soc. A Math. Phys. Eng. Sci. 2022, 478, 20210904. [Google Scholar] [CrossRef]
- Rudy, S.H.; Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Data driven discovery of partial differential equations. Sci. Adv. 2017, 3, e1602614. [Google Scholar] [CrossRef] [PubMed]
- Schaeffer, H. Learning partial differential equations via data discovery and sparse optimization. Proc. R. Soc. A 2017, 473, 20160446. [Google Scholar] [CrossRef] [PubMed]
- Dal Santo, N.; Deparis, S.; Pegolotti, L. Data driven approximation of parametrized PDEs by reduced basis and neural networks. J. Comput. Phys. 2020, 416, 109550. [Google Scholar] [CrossRef]
- Maslyaev, M.; Hvatov, A.; Kalyuzhnaya, A.V. Partial differential equations discovery with EPDE framework: Application for real and synthetic data. J. Comput. Sci. 2021, 53, 101345. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, D. Robust discovery of partial differential equations in complex situations. Phys. Rev. Res. 2021, 3, 033270. [Google Scholar] [CrossRef]
- Xu, H.; Chang, H.; Zhang, D. DLGA-PDE: Discovery of PDEs with incomplete candidate library via combination of deep learning and genetic algorithm. J. Comput. Phys. 2020, 418, 109584. [Google Scholar] [CrossRef]
- Bykov, N.Y.; Hvatov, A.A.; Kalyuzhnaya, A.V.; Boukhanovsky, A.V. A method for reconstructing models of heat and mass transfer from the spatio-temporal distribution of parameters. Tech. Phys. Lett. 2022, 48, 50–54. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning, 2nd ed.; Springer: New York, NY, USA, 2009; 745p. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020; Available online: https://www.r-project.org/ (accessed on 6 September 2023).
- Carslaw, H.S.; Jaeger, J.C. Conduction of Heat in Solids, 2nd ed.; Oxford University Press: Oxford, UK, 1959; 414p. [Google Scholar]
- Sun, S.; Li, S.; Shaheen, S.; Arain, M.B.; Usman; Khan, K.A. A numerical investigation of bio-convective electrically conducting water-based nanofluid flow on the porous plate with variable wall temperature. Numer. Heat Transf. Part A Appl. 2023, 1–15. [Google Scholar] [CrossRef]
- Bao, H.-X.; Arain, M.B.; Shaheen, S.; Khan, H.I.; Usman; Inc, M.; Yao, S.-W. Boundary-layer flow of heat and mass for Tiwari-Das nanofluid model over a flat plate with variable wall temperature. Therm. Sci. 2022, 26, 39–47. [Google Scholar] [CrossRef]
- Bykov, N.Y. Reconstructing the thermal process model using the time-space distributions of temperature. St. Petersburg Polytech. Univ. J.-Phys. Math. 2022, 15, 83–99. [Google Scholar] [CrossRef]
- Bykov, N.Y.; Hvatov, A.A.; Kalyuzhnaya, A.V.; Boukhanovsky, A.V. A method of generative model design based on irregular data in application to heat transfer problems. J. Phys. Conf. Ser. 2021, 1959, 012012. [Google Scholar] [CrossRef]
- Stephany, R.; Earls, C. PDE-READ: Human-readable partial differential equation discovery using deep learning. Neural Netw. 2020, 154, 360–382. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning: With Applications in R, 1st ed.; Springer: New York, NY, USA, 2013; 426p. [Google Scholar] [CrossRef]
- Priestley, M.B. Spectral Analysis and Time Series (Probability and Mathematical Statistics); Academic Press: Cambridge, UK, 1981; 890p. [Google Scholar]
- Rathore, K.R.; Sharma, K.; Sarda, A. An Adaptive Approach for Single Objective Optimization. Int. J. Eng. Res. App. 2014, 4, 737–747. [Google Scholar]
- Haryanto, I.; Raharjo, F.A.; Kurdi, O.; Haryadi, G.D.; Santosa, S.P.; Gunawan, L. Optimization of Bus Body Frame Structure for Weight Minimizing with Constraint of Natural Frequency using Adaptive Single-Objective Method. Int. J. Sustain. Transp. Technol. 2018, 1, 9–14. [Google Scholar] [CrossRef]
- Li, H.; Han, Y.; Shi, W.; Tiganik, T.; Zhou, L. Automatic optimization of centrifugal pump based on adaptive single-objective algorithm and computational fluid dynamics. Eng. Appl. Comput. Fluid Mech. 2022, 16, 2222–2242. [Google Scholar] [CrossRef]
- Animasaun, I.L.; Shah, N.A.; Wakif, A.; Mahanthesh, B.; Sivaraj, R.; Koriko, O.K. Ratio of Momentum Diffusivity to Thermal Diffusivity: Introduction, Meta-Analysis, and Scrutinization; Chapman and Hall/CRC: New York, NY, USA, 2022; 410p. [Google Scholar] [CrossRef]
- Munafò, C.F.; Palumbo, A.; Versaci, M. An Inhomogeneous Model for Laser Welding of Industrial Interest. Mathematics 2023, 11, 3357. [Google Scholar] [CrossRef]
- Larikov, L.N.; Yurchenko, Y.F. Thermal Properties of Metals and Alloys; Naukova Dumka: Kyiv, Ukraine, 1985; 438p. [Google Scholar]
- Zhang, M.; Che, Z.; Chen, J.; Zhao, H.; Yang, L.; Zhong, Z.; Lu, J. Experimental Determination of Thermal Conductivity of Water−Agar Gel at Different Concentrations and Temperatures. J. Chem. Eng. Data 2011, 56, 859–864. [Google Scholar] [CrossRef]
- Vargaftik, N.B. Handbook of Physical Properties of Liquids and Gases, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1975; 758p. [Google Scholar]
- Rabinovich, V.A.; Khavin, Z.Y. The Concise Chemical Handbook, 2nd ed.; Khimiya: Leningrad, Russia, 1978; 392p, Available online: http://www.vixri.ru/d2/KRATKIJ%20XIMIChESKIJ%20SPRAVOChNIK.pdf (accessed on 6 September 2023). (In Russian)
- Kutateladze, S.S. Fundamentals of Heat Transfer; Adademic Press, Inc.: New York, NY, USA, 1963. [Google Scholar]
- Boetcher, S.K.S. Natural Convection from Circular Cylinders; Springer: Cham, Switzerland, 2014; 48p. [Google Scholar] [CrossRef]
- Dai, C.; Wang, J. External natural convection from a Joule heated horizontal platinum wire in water at low Rayleigh number. Int. J. Heat Mass Transf. 2016, 93, 754–759. [Google Scholar] [CrossRef]
- Cieśliński, J.T.; Smolen, S.; Sawicka, D. Free Convection Heat Transfer from Horizontal Cylinders. Energies 2021, 14, 559. [Google Scholar] [CrossRef]
- Watanabe, H. Further examination of the transient hot-wire method for the simultaneous measurement of thermal conductivity and thermal diffusivity. Metrologia 2002, 39, 65–81. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Level η, % | c1, mm2/s | c2, mm2/s | c3, K/s |
|---|---|---|---|
| 0 | 0.154 ± 0.000 | 0.150 ± 0.000 | 0.000 |
| 0.1 | 0.153 ± 0.000 | 0.151 ± 0.000 | 0.000 |
| 0.3 | 0.14 ± 0.03 | 0.14 ± 0.03 | 0.002 ± 0.005 |
| 0.5 | 0.15 ± 0.2 | 0.15 ± 0.05 | 0.05 ± 0.03 |
| 0.7 | 0.13 ± 0.04 | 0.14 ± 0.07 | 0.10 ± 0.05 |
| 1.0 | 0.11 ± 0.07 | 0.13 ± 0.3 | 0.3 ± 0.1 |
| QV, W/mm3 | c1 × 102, mm2/s | c2 × 102, mm2/s | c3, K/s |
|---|---|---|---|
| 0.38 | 9.42 ± 0.04 | 9.40 ± 0.11 | 0.00 ± 0.01 |
| 1.83 | 9.4 ± 0.3 | 9.51 ± 0.27 |
| Noise Level, % | c3, mm2/s | c4, mm2/s | c0 × 104, K/s |
|---|---|---|---|
| 0 | 0.152 ± 0.000 | 0.149 ± 0.000 | (−3.74 ± 0.00) × 10−2 |
| 0.1 | 0.153 ± 0.001 | 0.1556 ± 0.0018 | 4.36 ± 1.3 |
| 0.5 | 0.133 ± 0.005 | 0.13 ± 0.08 | −5 ± 4 |
| 1.0 | 0.10 ± 0.05 | 0.09 ± 0.01 | −13 ± 9 |
| 1.5 | 0.074 ± 0.009 | 0.054 ± 0.013 | −12 ± 9 |
| QV, W/mm3 | τreg,t, s | c3 × 102, mm2/s | c4 × 102, mm2/s | c0 × 103, K/s |
|---|---|---|---|---|
| 0.38 | 0.2 | 7.131 | 4.608 | −2.095 |
| 0.38 | 1 | 6.832 | 4.374 | −2.190 |
| 0.38 | 2 | 7.000 | 4.502 | 2.312 |
| 0.38 | 5 | 7.261 | 4.809 | −1.863 |
| 1.83 | 0.2 | 8.818 | 1.354 | −40.29 |
| 1.83 | 1 | 8.813 | 1.425 | −39.90 |
| 1.83 | 2 | 8.074 | - | −44.59 |
| 1.83 | 5 | 7.951 | - | −44.14 |
| qmin, W/m2 | qmax, W/m2 | λmin, W/(m × K) | λmax, W/(m × K) | NIS | MNE | CT |
|---|---|---|---|---|---|---|
| 5000 | 15,000 | 0.1 | 0.5 | 6 | 20 | 10−6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andreeva, T.A.; Bykov, N.Y.; Gataulin, Y.A.; Hvatov, A.A.; Klimova, A.K.; Lukin, A.Y.; Maslyaev, M.A. Methods of Partial Differential Equation Discovery: Application to Experimental Data on Heat Transfer Problem. Processes 2023, 11, 2719. https://doi.org/10.3390/pr11092719
Andreeva TA, Bykov NY, Gataulin YA, Hvatov AA, Klimova AK, Lukin AY, Maslyaev MA. Methods of Partial Differential Equation Discovery: Application to Experimental Data on Heat Transfer Problem. Processes. 2023; 11(9):2719. https://doi.org/10.3390/pr11092719
Chicago/Turabian StyleAndreeva, Tatiana A., Nikolay Y. Bykov, Yakov A. Gataulin, Alexander A. Hvatov, Alexandra K. Klimova, Alexander Ya. Lukin, and Mikhail A. Maslyaev. 2023. "Methods of Partial Differential Equation Discovery: Application to Experimental Data on Heat Transfer Problem" Processes 11, no. 9: 2719. https://doi.org/10.3390/pr11092719
APA StyleAndreeva, T. A., Bykov, N. Y., Gataulin, Y. A., Hvatov, A. A., Klimova, A. K., Lukin, A. Y., & Maslyaev, M. A. (2023). Methods of Partial Differential Equation Discovery: Application to Experimental Data on Heat Transfer Problem. Processes, 11(9), 2719. https://doi.org/10.3390/pr11092719