
Design Optimization of Electrical Structure Parameters of Induction Asynchronous Mechanical–Electric–Hydraulic Power Coupler


Abstract
1. Introduction
1.1. Research Motivation
1.2. Literature Review
1.3. Contribution of This Paper
- A new multi-source power coupling device, IA-MEHPC, is proposed and modeled in three dimensions in this paper;
- IA-MEHPC electrodynamic torque optimization response surface model was established by co-simulation with Maxwell and Workbench (the co-simulation environment proposed by ANSYS);
- The IA-MEHPC electrical structure parameters are optimized to enable its motor performance to be improved.
1.4. Article Structure
2. IA-MEHPC Working Principle and Application
2.1. Structure and Working Principle of IA-MEHPC
2.2. Application of IA-MEHPC in HV
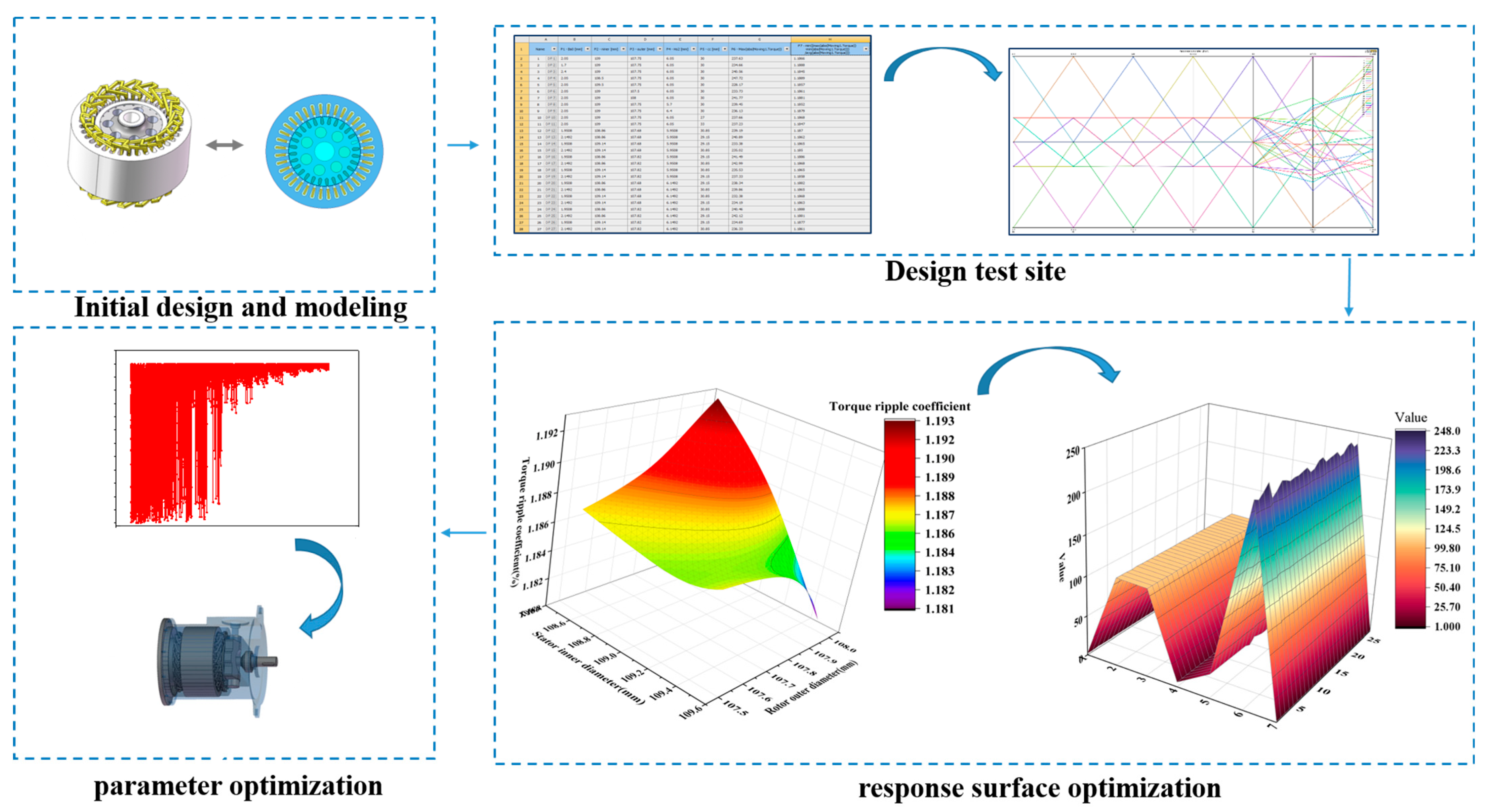
3. Electrical Structure Design Optimization Model
3.1. Finite Element Model
3.2. Selection of Optimization Parameters of IA-MEHPC
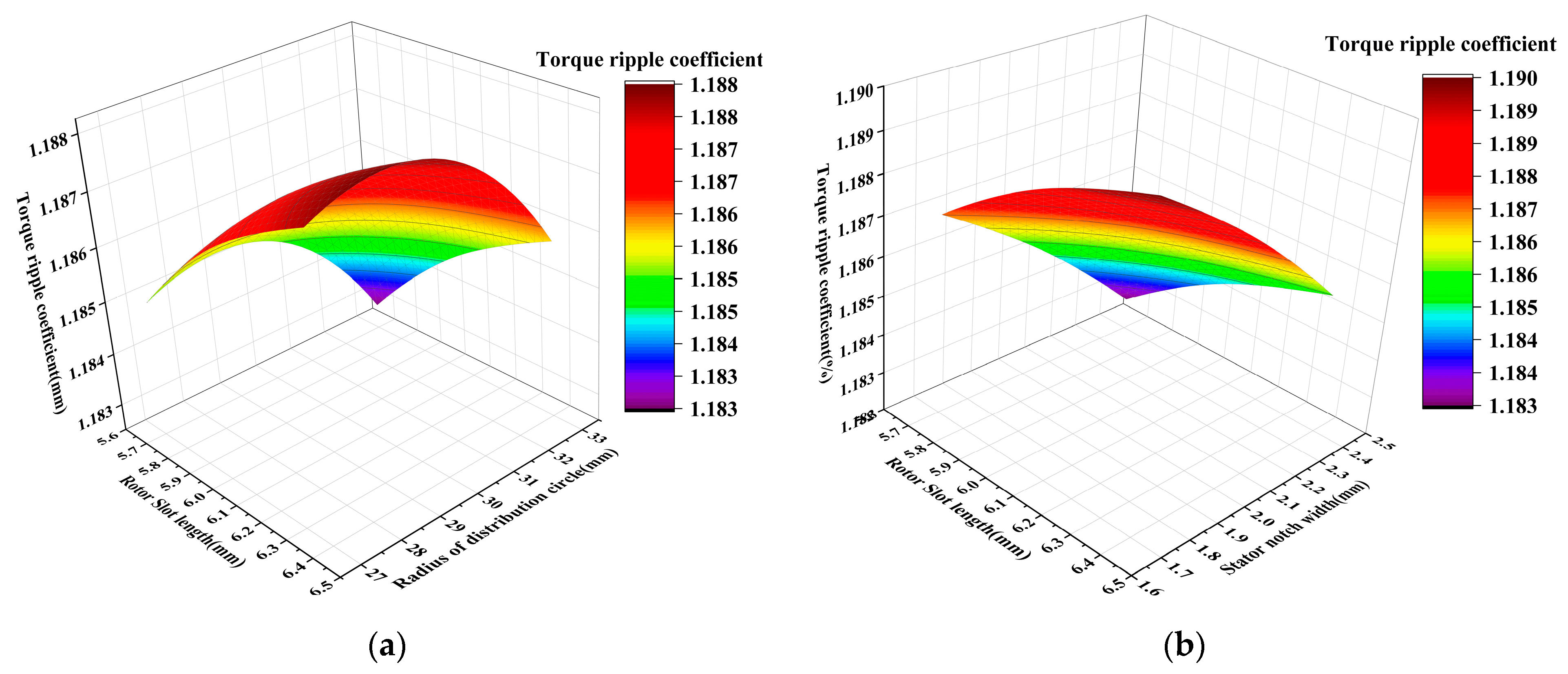
3.3. Response Surface Algorithm
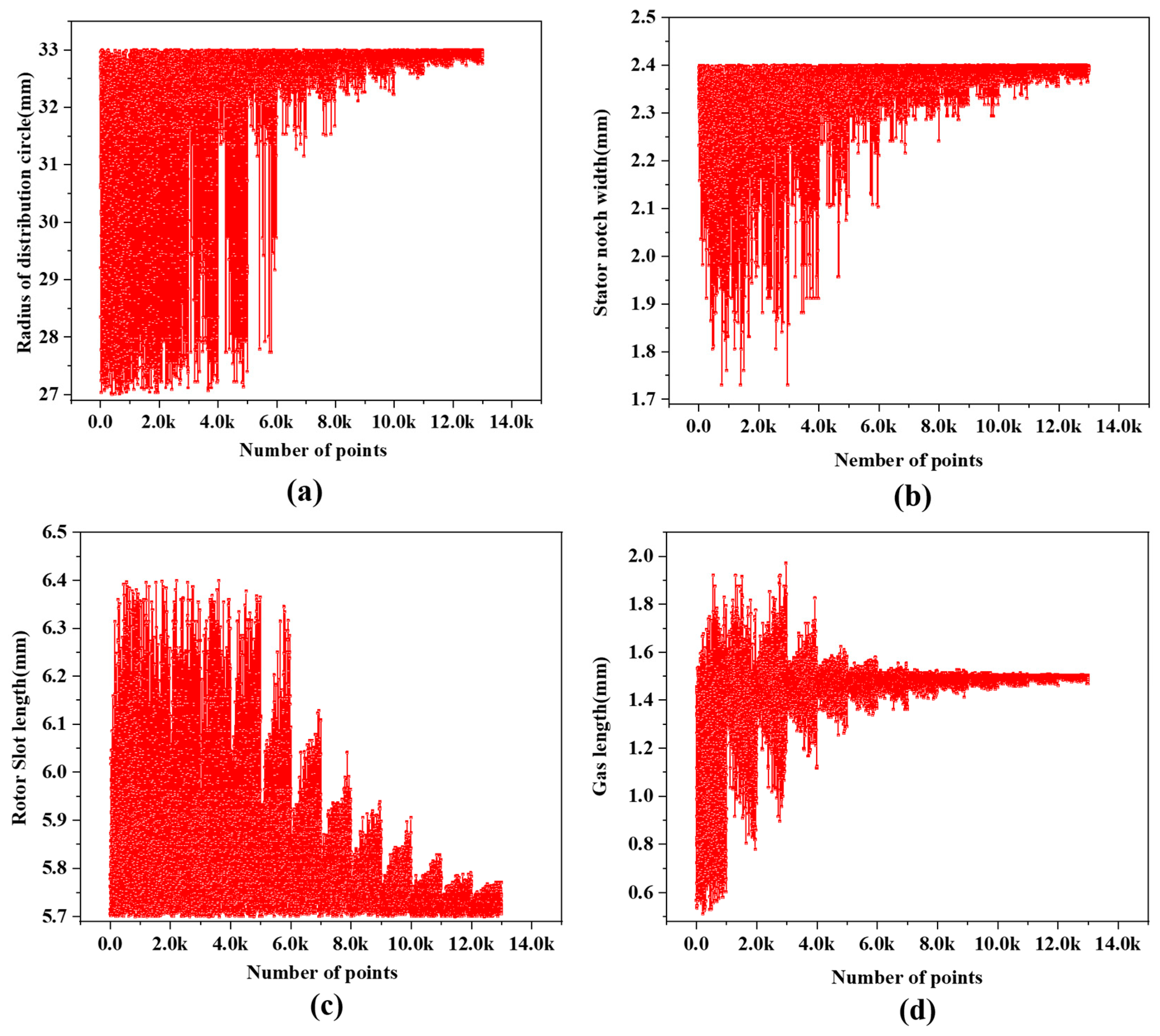
3.4. Optimization Process Design
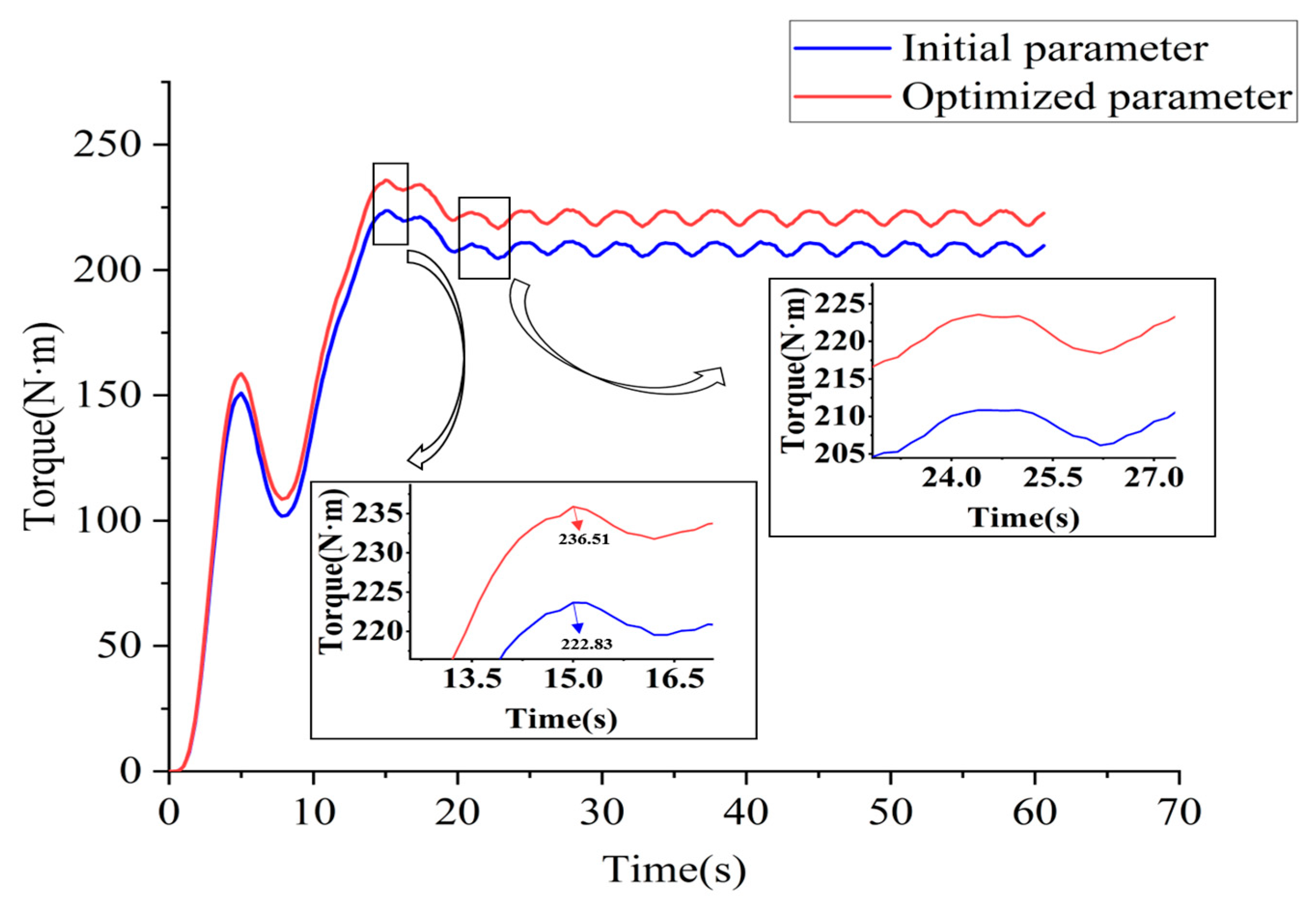
4. Optimization Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; Liu, B.; Zhang, T.; Hong, J.; Zhang, H. Multi-parameter controlled mechatronics-electro-hydraulic power coupling electric vehicle based on active energy regulation. Energy 2023, 263, 125877. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Yao, Y. Fault prognosis of battery system based on accurate voltage abnormity prognosis using long short-term memory neural networks. Appl. Energy 2019, 251, 113381. [Google Scholar] [CrossRef]
- Amjad, S.; Neelakrishnan, S.; Rudramoorthy, R. Review of design considerations and technological challenges for successful development and deployment of plug-in hybrid electric vehicles. Renew. Sustain. Energy Rev. 2010, 14, 1104–1110. [Google Scholar] [CrossRef]
- Hong, J.; Ma, F.; Xu, X.; Yang, J.; Zhang, H. A novel mechanical-electric-hydraulic power coupling electric vehicle considering different electrohydraulic distribution ratios. Energy Convers. Manag. 2021, 249, 114870. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, T.; Zhang, H.; Hong, J.; Meng, Z. Research on the starting acceleration characteristics of a new mechanical–electric–hydraulic power coupling electric vehicle. Energies 2020, 13, 6279. [Google Scholar] [CrossRef]
- Niu, G.; Shang, F.; Krishnamurthy, M.; Garcia, J.M. Design and Analysis of an Electric Hydraulic Hybrid Powertrain in Electric Vehicles. IEEE Trans. Transp. Electrif. 2017, 3, 48–57. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, L.; Ren, Y.; Li, Y.; Xiong, Z. Multi-objective optimization of active suspension system in electric vehicle with In-Wheel-Motor against the negative electromechanical coupling effects. Mech. Syst. Signal Process. 2019, 116, 545–565. [Google Scholar] [CrossRef]
- Hu, J.; Peng, T.; Jia, M.; Yang, Y.; Guan, Y. Study on Electromechanical Coupling Characteristics of an Integrated Electric Drive System for Electric Vehicle. IEEE Access 2019, 7, 166493–166508. [Google Scholar] [CrossRef]
- Line, C.; Manzie, C.; Good, M.C. Electromechanical Brake Modeling and Control: From PI to MPC. IEEE Trans. Control Syst. Technol. 2008, 16, 446–457. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, L.; Gao, W.; Zhan, Z. Electromechanical coupling mechanism and control strategy for in-wheel motor driven electric vehicles. IEEE Trans. Ind. Electron. 2018, 66, 4524–4533. [Google Scholar] [CrossRef]
- Hui, S.; Lifu, Y.; Junqing, J.; Yanling, L. Control strategy of hydraulic/electric synergy system in heavy hybrid vehicles. Energy Convers. Manag. 2011, 52, 668–674. [Google Scholar] [CrossRef]
- Yang, J.; Liu, B.; Zhang, T.; Hong, J.; Zhang, H. Application of energy conversion and integration technologies based on electro-hydraulic hybrid power systems: A review. Energy Convers. Manag. 2022, 272, 116372. [Google Scholar] [CrossRef]
- Wang, F.; Lin, Z.; Xu, B.; Fiebig, W. An Electric-Hydrostatic Energy Storage System for Hydraulic Hybrid Wheel Loader. IEEE Trans. Veh. Technol. 2022, 71, 7044–7056. [Google Scholar] [CrossRef]
- Chen, J.-S. Energy Efficiency Comparison between Hydraulic Hybrid and Hybrid Electric Vehicles. Energies 2015, 8, 4697–4723. [Google Scholar] [CrossRef]
- Wu, W.; Hu, J.; Yuan, S.; Di, C. A hydraulic hybrid propulsion method for automobiles with self-adaptive system. Energy 2016, 114, 683–692. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, T.; Hong, J.; Zhang, H.; Yang, J. Energy management strategy of a novel parallel electric-hydraulic hybrid electric vehicle based on deep reinforcement learning and entropy evaluation. J. Clean. Prod. 2023, 403, 136800. [Google Scholar] [CrossRef]
- Hui, S.; Lifu, Y.; Junqing, J. Hydraulic/electric synergy system (HESS) design for heavy hybrid vehicles. Energy 2010, 35, 5328–5335. [Google Scholar] [CrossRef]
- El-Kharashi, E.; El-Dessouki, M. Coupling induction motors to improve the energy conversion process during balanced and unbalanced operation. Energy 2014, 65, 511–516. [Google Scholar] [CrossRef]
- Islam, M.S.; Islam, R.; Sebastian, T. Experimental verification of design techniques of permanent-magnet synchronous motors for low-torque-ripple applications. IEEE Trans. Ind. Appl. 2010, 47, 88–95. [Google Scholar] [CrossRef]
- Shyu, K.K.; Lin, J.K.; Pham, V.T.; Yang, M.J.; Wang, T.W. Global minimum torque ripple design for direct torque control of induction motor drives. IEEE Trans. Ind. Electron. 2009, 57, 3148–3156. [Google Scholar] [CrossRef]
- Hao, Z.; Yu, Q.; Cao, X.; Deng, X.; Shen, X. An improved direct torque control for a single-winding bearingless switched reluctance motor. IEEE Trans. Energy Convers. 2020, 35, 1381–1393. [Google Scholar] [CrossRef]
- Duan, F.; Živanović, R.; Al-Sarawi, S.; Mba, D. Induction motor parameter estimation using sparse grid optimization algorithm. IEEE Trans. Ind. Inform. 2016, 12, 1453–1461. [Google Scholar] [CrossRef]
- Zhou, J.; Cheng, M.; Wen, H.; Yan, X.; Tong, M.; Wang, W. Modeling and Suppression of Torque Ripple in PMSM Based on the General Airgap Field Modulation Theory. IEEE Trans. Power Electron. 2022, 37, 12502–12512. [Google Scholar] [CrossRef]
- Zhu, X.; Yang, J.; Xiang, Z.; Jiang, M.; Zheng, S.; Quan, L. Robust-oriented optimization design for permanent magnet motors considering parameter fluctuation. IEEE Trans. Energy Convers. 2020, 35, 2066–2075. [Google Scholar] [CrossRef]
- Ertan, H.B.; Dag, B.; Capolino, G.A. Calculation of parameters of single-phase PM motor for design optimization. IEEE Trans. Energy Convers. 2005, 20, 538–548. [Google Scholar] [CrossRef]
- Qiu, H.; Duan, H. Multi-objective pigeon-inspired optimization for brushless direct current motor parameter design. Sci. China Technol. Sci. 2015, 58, 1915–1923. [Google Scholar] [CrossRef]
- Kucukkoc, I.; Karaoglan, A.D.; Yaman, R. Using response surface design to determine the optimal parameters of genetic algorithm and a case study. Int. J. Prod. Res. 2013, 51, 5039–5054. [Google Scholar] [CrossRef]
- Bakhtiari, H.; Karimi, M.; Rezazadeh, S. Modeling, analysis and multi-objective optimization of twist extrusion process using predictive models and meta-heuristic approaches, based on finite element results. J. Intell. Manuf. 2016, 27, 463–473. [Google Scholar] [CrossRef]
- Todoroki, A.; Ishikawa, T. Design of experiments for stacking sequence optimizations with genetic algorithm using response surface approximation. Compos. Struct. 2004, 64, 349–357. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Number of slots/pole pairs | 36/3 |
| Number of plunger holes | 7 |
| Stator core length/mm | 84 |
| Diameter of plunger/mm | 17 |
| Distribution diameter/mm | 30 |
| Gas length/mm | 0.75 |
| Number of slots/pole pairs | 36/3 |
| Parameter | Initial Value | Variation Range |
|---|---|---|
| Gas length/mm | 0.75 | 0.25~1 |
| Stator notch width/mm | 1.7 | 1.53~1.87 |
| Rotor Slot length/mm | 6 | 5.2~6.6 |
| Radius of distribution circle/mm | 30 | 27~33 |
| Point | 1 Bs0/mm | 2 Hs2/mm | Gas Length/mm | 3 R/mm | Torque /N·m | Ripple Torque Coefficient/% |
|---|---|---|---|---|---|---|
| 1 | 2.05 | 6.05 | 0.625 | 30 | 237.63 | 1.1866 |
| 2 | 1.7 | 6.05 | 0.625 | 30 | 234.66 | 1.1888 |
| 3 | 2.4 | 6.05 | 0.625 | 30 | 240.56 | 1.1845 |
| 4 | 2.05 | 6.05 | 0.375 | 30 | 247.72 | 1.1889 |
| 5 | 2.05 | 6.05 | 0.875 | 30 | 228.17 | 1.1857 |
| 6 | 2.05 | 6.05 | 0.75 | 30 | 233.73 | 1.1861 |
| 7 | 2.05 | 6.05 | 0.5 | 30 | 241.77 | 1.1881 |
| 8 | 2.05 | 5.7 | 0.625 | 30 | 239.45 | 1.1852 |
| 9 | 2.05 | 6.4 | 0.625 | 30 | 236.13 | 1.1879 |
| 10 | 2.05 | 6.05 | 0.625 | 27 | 237.66 | 1.1868 |
| 11 | 2.05 | 6.05 | 0.625 | 33 | 237.23 | 1.1847 |
| 12 | 1.9508 | 5.9508 | 0.59 | 30.85 | 239.19 | 1.187 |
| 13 | 2.1492 | 5.9508 | 0.59 | 29.15 | 240.89 | 1.1862 |
| 14 | 1.9508 | 5.9508 | 0.73 | 29.15 | 233.38 | 1.1865 |
| 15 | 2.1492 | 5.9508 | 0.73 | 30.85 | 235.02 | 1.185 |
| 16 | 1.9508 | 5.9508 | 0.52 | 29.15 | 241.49 | 1.1886 |
| 17 | 2.1492 | 5.9508 | 0.52 | 30.85 | 242.99 | 1.1868 |
| 18 | 1.9508 | 5.9508 | 0.66 | 30.85 | 235.53 | 1.1865 |
| 19 | 2.1492 | 5.9508 | 0.66 | 29.15 | 237.33 | 1.1858 |
| 20 | 1.9508 | 6.1492 | 0.59 | 29.15 | 238.34 | 1.1882 |
| 21 | 2.1492 | 6.1492 | 0.59 | 30.85 | 239.86 | 1.1865 |
| 22 | 1.9508 | 6.1492 | 0.73 | 30.85 | 232.38 | 1.1868 |
| 23 | 2.1492 | 6.1492 | 0.73 | 29.15 | 234.19 | 1.1863 |
| 24 | 1.9508 | 6.1492 | 0.52 | 30.85 | 240.46 | 1.1888 |
| 25 | 2.1492 | 6.1492 | 0.52 | 29.15 | 242.12 | 1.1881 |
| 26 | 1.9508 | 6.1492 | 0.66 | 29.15 | 234.69 | 1.1877 |
| 27 | 2.1492 | 6.1492 | 0.66 | 30.85 | 236.33 | 1.1861 |
| Parameter | Optimized Value |
|---|---|
| Gas length/mm | 0.7 |
| Stator notch width/mm | 2.3994 |
| Rotor Slot length/mm | 5.7058 |
| Radius of distribution circle/mm | 32.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zhang, T.; Zhang, H.; Zhang, Z.; Chen, H. Design Optimization of Electrical Structure Parameters of Induction Asynchronous Mechanical–Electric–Hydraulic Power Coupler. Processes 2023, 11, 2217. https://doi.org/10.3390/pr11072217
Wang J, Zhang T, Zhang H, Zhang Z, Chen H. Design Optimization of Electrical Structure Parameters of Induction Asynchronous Mechanical–Electric–Hydraulic Power Coupler. Processes. 2023; 11(7):2217. https://doi.org/10.3390/pr11072217
Chicago/Turabian StyleWang, Junyi, Tiezhu Zhang, Hongxin Zhang, Zhen Zhang, and Hao Chen. 2023. "Design Optimization of Electrical Structure Parameters of Induction Asynchronous Mechanical–Electric–Hydraulic Power Coupler" Processes 11, no. 7: 2217. https://doi.org/10.3390/pr11072217
APA StyleWang, J., Zhang, T., Zhang, H., Zhang, Z., & Chen, H. (2023). Design Optimization of Electrical Structure Parameters of Induction Asynchronous Mechanical–Electric–Hydraulic Power Coupler. Processes, 11(7), 2217. https://doi.org/10.3390/pr11072217