


CFD Validation of Moment Balancing Method on Drag-Dominant Tidal Turbines (DDTTs)




Abstract
1. Introduction
- Net moment analysis: Balancing equation derived from the sum of idle and thrust moments, aiding TSR calculation with 15.3% and 10.0% error rate (CFD model).
- Optimal power generation: Determining power coefficient and operating conditions based on the torque–power relationship with experimental and numerical validation.
- Robust power coefficient finder: Zero net moment identifies optimal TSR, applicable to turbines of any shape or orientation.
- Time and cost savings: Moment parameter collection using steady and K-ε turbulence model, accessible on a standard laptop for 3D CFD models. Fast convergence saves time.
2. Methodology
2.1. Channel Parametric Study
2.2. Mesh Overview
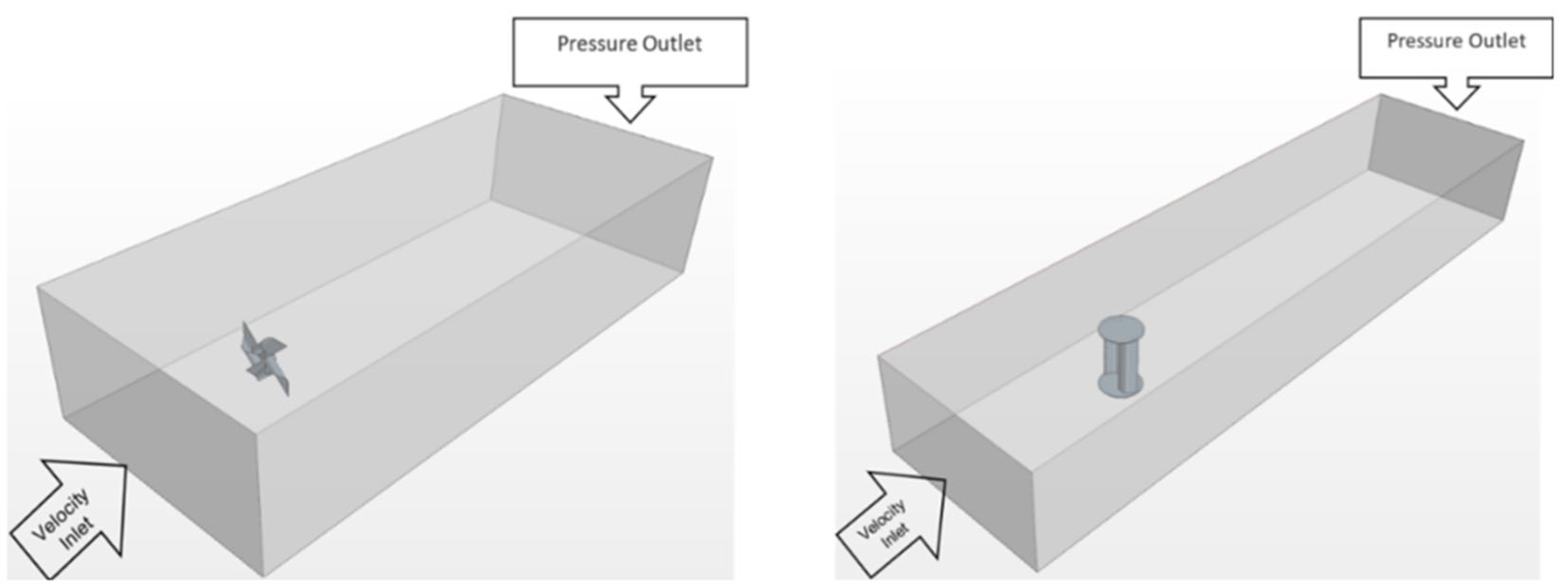
2.3. Boundary Conditions with Dynamic TSR Matrix
2.4. Derivation of Characteristic Equation
2.4.1. Net Moment Balancing Equation
2.4.2. Thrust and Idle Moment Equation
2.4.3. Governing Equations with Turbulence Equations
3. Results and Discussion
3.1. Idle and Thrust Moment Relationship Quadratic with and
3.2. Net Moment Plots
3.3. Cp vs. TSR Curve
3.4. Turbine Wake Streamline Plots
3.5. Blade Load Distribution by Pressure Analysis
3.6. Error and Uncertainty Discussion
4. Conclusions
- It was found that at the neutral point, the idle and thrust moments offset each other in the optimal state. By using this method, the optimal TSR and Cp for the Pinwheel turbine were 2.37 and 0.223, respectively, while for the Savonius turbine, they were 0.63 and 0.160, respectively.
- Rotational speed was found to be an excellent predictor for Pinwheel’s idle moment, while the inlet velocity was an excellent predictor for the thrust moment in both models.
- Pinwheel was observed to have a greater blade load, especially on the trailing edge of the blade. The turbine blade shape can be optimized by trimming the area with a greater pressure difference.
- The moment balancing method is suitable for the preliminary application of turbine configuration design and machinery testing using commercial software, as it reduces computation time and cost.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Angular momentum, kg.m2/s | Greek Letters | ||
| Cross-section area of a rotor plate, m | r | Density, kg/m3 | |
| Inflow speed, m/s | λ | Tip Speed Ratio | |
| R | Rotor radius, m | Turbine’s rotation speed, rad/s | |
| Cp | Power Coefficient | Dynamic Viscosity, Pa.s | |
| Thrust Coefficient | |||
| R | Rotor radius, m | Subscripts | |
| CFD | Computational Fluid Dynamics | opt | Optimal case |
| EU | European Union | ||
| DDTTs | Drag-dominated tidal turbines | Superscripts | |
| K-ε | Kappa-Epsilon Turbulence Model | * | Offset condition |
| K-ω | Kappa-Omega Turbulence Model | ||
| SST | Shear-Stress Transport Turbulence Model | ||
| VATs | Vertical Axis Turbines | ||
| DDTTs | Drag-Dominant Tidal Turbines | ||
| BEM | Blade Element Method | ||
| MRF | Moving Reference Frame | ||
References
- IRENA. Innovation Outlook: Ocean Energy Technologies; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2020. [Google Scholar]
- Niebuhr, C.; Van Dijk, M.; Bhagwan, J. Development of a Design and Implementation Process for the Integration of Hydrokinetic Devices into Existing Infrastructure in South Africa. Water SA 2019, 45, 434–446. [Google Scholar] [CrossRef]
- de Falcão, A.F.O. Wave Energy Utilization: A Review of the Technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Garcia Novo, P.; Kyozuka, Y. Tidal Stream Energy as a Potential Continuous Power Producer: A Case Study for West Japan. Energy Convers. Manag. 2021, 245, 114533. [Google Scholar] [CrossRef]
- Chowdhury, M.S.; Rahman, K.S.; Selvanathan, V.; Nuthammachot, N.; Suklueng, M.; Mostafaeipour, A.; Habib, A.; Akhtaruzzaman, M.; Amin, N.; Techato, K. Current Trends and Prospects of Tidal Energy Technology. Environ. Dev. Sustain. 2020, 23, 8179–8194. [Google Scholar] [CrossRef]
- European Commission. Tidal Flows Generate Huge Potential for Clean Electricity|Research and Innovation. ec.europa.eu. Available online: https://ec.europa.eu/research-and-innovation/en/projects/success-stories/all/tidal-flows-generate-huge-potential-clean-electricity (accessed on 7 March 2023).
- Islam, R.; Bin Bashar, L.; Rafi, N.S. Design and Simulation of a Small Wind Turbine Blade with Qblade and Validation with MATLAB. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 December 2019. [Google Scholar] [CrossRef]
- Nemoto, Y.; Ushiyama, I. Experimental Study of a Pinwheel-Type Wind Turbine. Wind Eng. 2003, 27, 227–236. [Google Scholar] [CrossRef]
- Islam, R.; Sultana Snikdha, Z.; Iffat, A.; Shahadat, M.Z. Optimum Blade Design of Pinwheel Type Horizontal Axis Wind Turbine for Low Wind Speed Areas. In Proceedings of the 2021 International Conference on Automation, Control and Mechatronics for Industry 4.0 (ACMI), Rajshahi, Bangladesh, 8–9 July 2021. [Google Scholar] [CrossRef]
- Wihadi, D.; Mardikus, S. Experimental Investigation of Blades Number of Savonius Water Turbine on Performance Characteristic. In Proceedings of the 5th International Conference on Industrial, Mechanical, Electrical, and Chemical Engineering 2019 (ICIMECE 2019), Surakarta, Indonesia, 17–18 September 2019. [Google Scholar] [CrossRef]
- Biswas, A.; Gupta, R.; Sharma, K.K. Experimental Investigation of Overlap and Blockage Effects on Three-Bucket Savonius Rotors. Wind Eng. 2007, 31, 363–368. [Google Scholar] [CrossRef]
- Patel, V.; Patel, R. Energy Extraction Using Modified Savonius Rotor from Free-Flowing Water. Mater. Today Proc. 2021, 45, 5190–5196. [Google Scholar] [CrossRef]
- Alipour, R.; Alipour, R.; Fardian, F.; Koloor, S.S.R.; Petrů, M. Performance Improvement of a New Proposed Savonius Hydrokinetic Turbine: A Numerical Investigation. Energy Rep. 2020, 6, 3051–3066. [Google Scholar] [CrossRef]
- Tian, W.; Song, B.; VanZwieten, J.; Pyakurel, P. Computational Fluid Dynamics Prediction of a Modified Savonius Wind Turbine with Novel Blade Shapes. Energies 2015, 8, 7915–7929. [Google Scholar] [CrossRef]
- Zullah, M.A.; Prasad, D.; Choi, Y.-D.; Lee, Y.-H.; Wahid, M.A.; Samion, S.; Sidik, N.A.C.; Sheriff, J.M. Study on the Performance of Helical Savonius Rotor for Wave Energy Conversion. AIP Conf. Proc. 2010, 1225, 641–649. [Google Scholar] [CrossRef]
- Gruber, T.; Murray, M.M.; Fredriksson, D.W. Effect of Humpback Whale Inspired Tubercles on Marine Tidal Turbine Blades. ASME Int. Mech. Eng. Congr. Expo. 2011, 54884, 851–857. [Google Scholar] [CrossRef]
- Crooks, J.M.; Hewlin, R.L.; Williams, W.B. Computational Design Analysis of a Hydrokinetic Horizontal Parallel Stream Direct Drive Counter-Rotating Darrieus Turbine System: A Phase One Design Analysis Study. Energies 2022, 15, 8942. [Google Scholar] [CrossRef]
- Liu, W.; Liu, L.; Wu, H.; Chen, Y.; Zheng, X.; Ningyu, L.; Zhang, Z. Performance Analysis and Offshore Applications of the Diffuser Augmented Tidal Turbines. Ships Offshore Struct. 2022, 18, 68–77. [Google Scholar] [CrossRef]
- Cacciali, L.; Battisti, L.; Dell’Anna, S. Multi-Array Design for Hydrokinetic Turbines in Hydropower Canals. Energies 2023, 16, 2279. [Google Scholar] [CrossRef]
- Mycek, P.; Gaurier, B.; Germain, G.; Pinon, G.; Rivoalen, E. Experimental Study of the Turbulence Intensity Effects on Marine Current Turbines Behaviour. Part II: Two Interacting Turbines. Renew. Energy 2014, 68, 876–892. [Google Scholar] [CrossRef]
- Hill, C.L.; Neary, V.S.; Guala, M.; Sotiropoulos, F. Performance and Wake Characterization of a Model Hydrokinetic Turbine: The Reference Model 1 (RM1) Dual Rotor Tidal Energy Converter. Energies 2020, 13, 5145. [Google Scholar] [CrossRef]
- Zhang, B.; Song, B.; Mao, Z.; Tian, W. A Novel Wake Energy Reuse Method to Optimize the Layout for Savonius-Type Vertical Axis Wind Turbines. Energy 2017, 121, 341–355. [Google Scholar] [CrossRef]
- Bakar, N.A.A.; Shamsuddin, M.S.M.; Kamaruddin, N.M. Experimental Study of a Hybrid Turbine for Hydrokinetic Applications on Small Rivers in Malaysia. J. Adv. Res. Appl. Sci. Eng. Technol. 2022, 28, 318–324. [Google Scholar] [CrossRef]
- Aliferis, A.D.; Jessen, M.S.; Bracchi, T.; Hearst, R.J. Performance and Wake of a Savonius Vertical-Axis Wind Turbine under Different Incoming Conditions. Wind Energy 2019, 22, 1260–1273. [Google Scholar] [CrossRef]
- Kang, C.; Opare, W.; Pan, C.; Zou, Z. Upstream Flow Control for the Savonius Rotor under Various Operation Conditions. Energies 2018, 11, 1482. [Google Scholar] [CrossRef]
- Yuwono, T.; Sakti, G.; Nur Aulia, F.; Chandra Wijaya, A. Improving the Performance of Savonius Wind Turbine by Installation of a Circular Cylinder Upstream of Returning Turbine Blade. Alex. Eng. J. 2020, 59, 4923–4932. [Google Scholar] [CrossRef]
- Kumar, A.; Saini, G. Flow Field and Performance Study of Savonius Water Turbine. Mater. Today Proc. 2021, 46, 5219–5222. [Google Scholar] [CrossRef]
- Salazar Marin, E.A.; Rodríguez, A.F. Design, Assembly and Experimental Tests of a Savonius Type Wind Turbine. Sci. Tech. 2019, 24, 397–407. [Google Scholar] [CrossRef]
- Brusca, S.; Lanzafame, R.; Messina, M. Design of a Vertical-Axis Wind Turbine: How the Aspect Ratio Affects the Turbine’s Performance. Int. J. Energy Environ. Eng. 2014, 5, 333–340. [Google Scholar] [CrossRef]
- Lee, M.; Park, G.; Park, C.; Kim, C. Improvement of Grid Independence Test for Computational Fluid Dynamics Model of Building Based on Grid Resolution. Adv. Civ. Eng. 2020, 2020, 8827936. [Google Scholar] [CrossRef]
- Tu, J.; Yeoh, G.H.; Liu, C. Computational Fluid Dynamics a Practical Approach; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Duan, R.; Liu, W.; Xu, L.; Huang, Y.; Shen, X.; Lin, C.-H.; Liu, J.; Chen, Q.; Sasanapuri, B. Mesh Type and Number for the CFD Simulations of Air Distribution in an Aircraft Cabin. Numer. Heat Transf. Part B Fundam. 2015, 67, 489–506. [Google Scholar] [CrossRef]
- Lin, C.A.; Fox, P.; Ecer, A.; Satofuka, N.; Periaux, J. Parallel Computational Fluid Dynamics ’98 : Development and Applications of Parallel Technology, 1st ed.; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Mavriplis, D.J. Unstructured Grid Techniques. Annu. Rev. Fluid Mech. 1997, 29, 473–514. [Google Scholar] [CrossRef]
- Lo, D.S.H. Finite Element Mesh Generation; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Hara, Y.; Hara, K.; Hayashi, T. Moment of Inertia Dependence of Vertical Axis Wind Turbines in Pulsating Winds. Int. J. Rotating Mach. 2012, 2012, 910940. [Google Scholar] [CrossRef]
- Ordonez-Sanchez, S.; Allmark, M.; Porter, K.; Ellis, R.; Lloyd, C.; Santic, I.; O’Doherty, T.; Johnstone, C. Analysis of a Horizontal-Axis Tidal Turbine Performance in the Presence of Regular and Irregular Waves Using Two Control Strategies. Energies 2019, 12, 367. [Google Scholar] [CrossRef]
- Menon, S.H.; Mathew, J.; Jayaprakash, J. Derivation of Navier–Stokes Equation in Rotational Frame for Engineering Flow Analysis. Int. J. 2021, 11, 100096. [Google Scholar] [CrossRef]
- Hu, J.; Ren, K.; Wei, J.; Xiong, X.; Zhang, L. Validation of Turbulence Models in STAR-CCM+ by N.A.C.A. 23012 Airfoil Characteristics. In 2009 ASEE Northeast Section Conference; UB ScholarWorks: Bridgeport, CT, USA, 2009. [Google Scholar]
- Jiang, Z.; Shi, Z.; Jiang, H.; Huang, Z.; Huang, L. Investigation of the Load and Flow Characteristics of Variable Mass Forced Sloshing. Phys. Fluids 2023, 35, 033325. [Google Scholar] [CrossRef]
- Zhang, C.; Bounds, C.P.; Foster, L.; Uddin, M. Turbulence Modeling Effects on the CFD Predictions of Flow over a Detailed Full-Scale Sedan Vehicle. Fluids 2019, 4, 148. [Google Scholar] [CrossRef]
- Weaver, D.S.; Mišković, S. A Study of RANS Turbulence Models in Fully Turbulent Jets: A Perspective for CFD-DEM Simulations. Fluids 2021, 6, 271. [Google Scholar] [CrossRef]
- Yang, B.; Lawn, C. Fluid Dynamic Performance of a Vertical Axis Turbine for Tidal Currents. Renew. Energy 2011, 36, 3355–3366. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Pinwheel | Savonius | Parameter | Unit | Pinwheel | Savonius |
|---|---|---|---|---|---|---|---|
| Blade Radius | m | 0.3 | 0.059 | Channel Height | m | 1.13 | 0.325 |
| Rotor Diameter | m | 0.6 | 0.118 | Channel Area | m2 | 2.36 | 0.195 |
| Rotor Height | m | 0.6 | 0.187 | Aspect Ratio | / | 1.85 | 1.85 |
| End-Plate Diameter | m | - | 0.130 | Blockage Ratio | / | 0.12 | 0.12 |
| Blade Area | m2 | 0.283 | 0.022 | Min Re | / | 542 k | 129 k |
| Channel Width | m | 2.09 | 0.600 | Max Re | / | 1354 k | 323 k |
| Fluid Temperature | 25 °C | Density | 997.56 kg/m3 | Turbulence | K-ε turbulence |
| Dynamic Viscosity | 0.00108 Pa/s | Flow properties | Steady incompressible flow | ||
| Solver | Segregated flow | Target Residuals | 10−3 | ||
| TSR | Rotational Speed ω (rad/s) | ||||
|---|---|---|---|---|---|
| 6.67 | 7.50 | 8.00 | 8.17 | ||
| Inlet speed U1 (m/s) | 0.40 | 0.80 | 0.80 | 0.79 | 0.81 |
| 0.50 | 1.08 | 1.15 | 1.16 | 1.19 | |
| 0.60 | 1.49 | 1.52 | 1.55 | 1.57 | |
| 0.70 | 1.94 | 1.99 | 2.03 | 2.06 | |
| 0.80 | 2.56 | 2.57 | 2.58 | 2.62 | |
| 0.90 | 3.26 | 3.23 | 3.26 | 3.29 | |
| 1.00 | 4.18 | 4.02 | 4.00 | 4.03 | |
| TSR | Rotational Speed ω (rad/s) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 4.50 | 5.00 | 5.25 | 5.50 | 5.75 | 6.00 | 6.25 | 6.50 | 6.75 | ||
| Inlet speed U1 (m/s) | 0.33 | 0.8 | 0.89 | 0.94 | 0.98 | 1.03 | 1.07 | 1.12 | 1.16 | 1.21 |
| 0.42 | 0.63 | 0.7 | 0.74 | 0.77 | 0.81 | 0.84 | 0.88 | 0.91 | 0.95 | |
| 0.46 | 0.58 | 0.64 | 0.67 | 0.71 | 0.74 | 0.77 | 0.8 | 0.83 | 0.87 | |
| 0.50 | 0.53 | 0.59 | 0.62 | 0.65 | 0.68 | 0.71 | 0.74 | 0.77 | 0.80 | |
| 0.54 | 0.49 | 0.55 | 0.57 | 0.60 | 0.63 | 0.66 | 0.68 | 0.71 | 0.74 | |
| 0.58 | 0.46 | 0.51 | 0.53 | 0.56 | 0.58 | 0.61 | 0.64 | 0.66 | 0.69 | |
| 0.67 | 0.40 | 0.44 | 0.46 | 0.48 | 0.51 | 0.53 | 0.55 | 0.57 | 0.59 | |
| 0.75 | 0.35 | 0.39 | 0.41 | 0.43 | 0.45 | 0.47 | 0.49 | 0.51 | 0.53 | |
| 0.83 | 0.32 | 0.36 | 0.37 | 0.39 | 0.41 | 0.43 | 0.44 | 0.46 | 0.48 | |
| Processor Brand | Intel Core i7th Gen |
|---|---|
| Clock Speed | 2.8 GHz (Max 3.8 GHz) |
| Graphic Processor (GPU) | NVIDIA GeForce GTX 1060 |
| Dedicated Graphic Memory Type | GDDR5 (6 GB RAM) |
| RAM | DDR4 16 GB |
| RAM Frequency | 2400 MHz |
| Total Solver CPU Computation Time | 6965.78 sec (≈1.9 hrs) for Pinwheel, TSR = 0.24 2814.98 sec (≈0.8 hrs) for Savonius, TSR = 0.71 |
| Equations | Model |
|---|---|
| Pinwheel | |
| Savonius |
| Model | Reference Study | Simulation Result | Error Percentage |
|---|---|---|---|
| Pinwheel | 2.0 [8] | 2.37 (Optimal TSR) | × 100 = 15.6% |
| 0.17 [8] | 0.223 (Optimal Cp) | × 100 = 23.8% | |
| Savonius | 0.7 [27] | 0.63 (Optimal TSR) | ( |
| 0.23 [27] | 0.29 (Optimal Cp) | ( |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Mittal, S.; Ng, E.Y.-K. CFD Validation of Moment Balancing Method on Drag-Dominant Tidal Turbines (DDTTs). Processes 2023, 11, 1895. https://doi.org/10.3390/pr11071895
Zhang Y, Mittal S, Ng EY-K. CFD Validation of Moment Balancing Method on Drag-Dominant Tidal Turbines (DDTTs). Processes. 2023; 11(7):1895. https://doi.org/10.3390/pr11071895
Chicago/Turabian StyleZhang, Yixiao, Shivansh Mittal, and Eddie Yin-Kwee Ng. 2023. "CFD Validation of Moment Balancing Method on Drag-Dominant Tidal Turbines (DDTTs)" Processes 11, no. 7: 1895. https://doi.org/10.3390/pr11071895
APA StyleZhang, Y., Mittal, S., & Ng, E. Y.-K. (2023). CFD Validation of Moment Balancing Method on Drag-Dominant Tidal Turbines (DDTTs). Processes, 11(7), 1895. https://doi.org/10.3390/pr11071895