
Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm

Abstract
:1. Introduction
2. Proposed Optimization
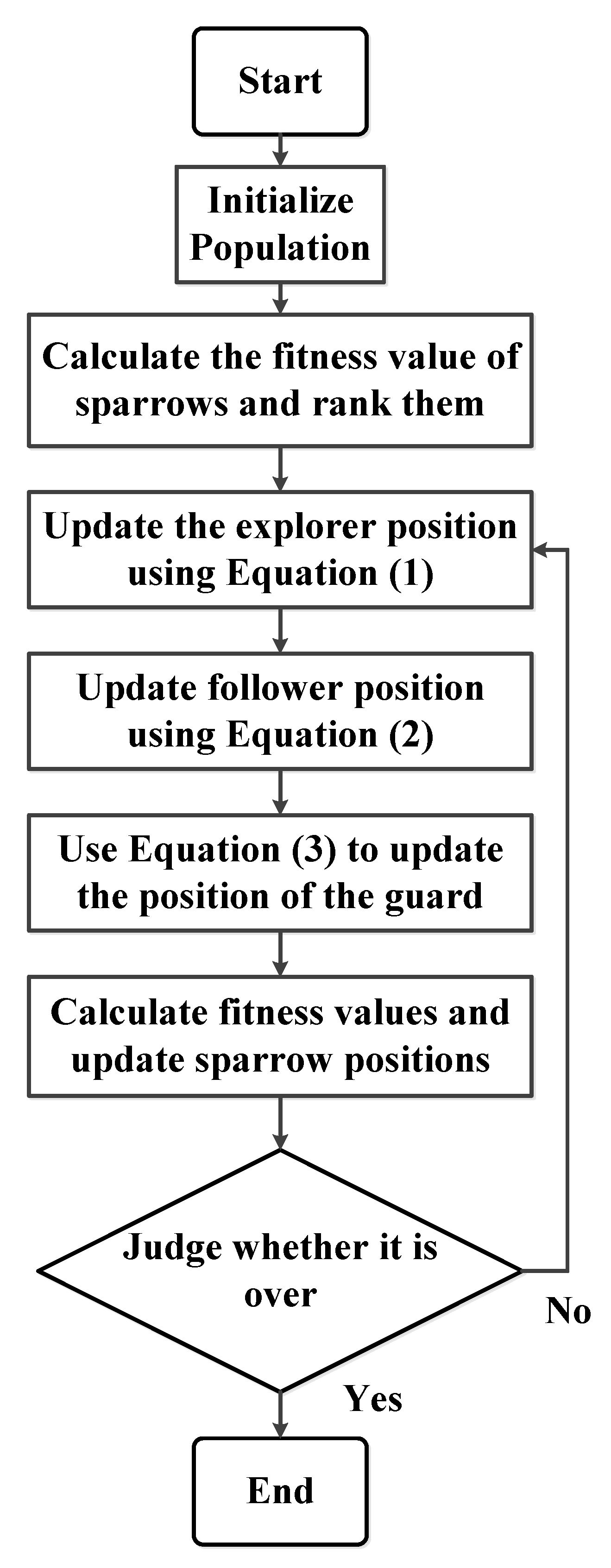
2.1. Traditional SSA
2.2. Improved SSA
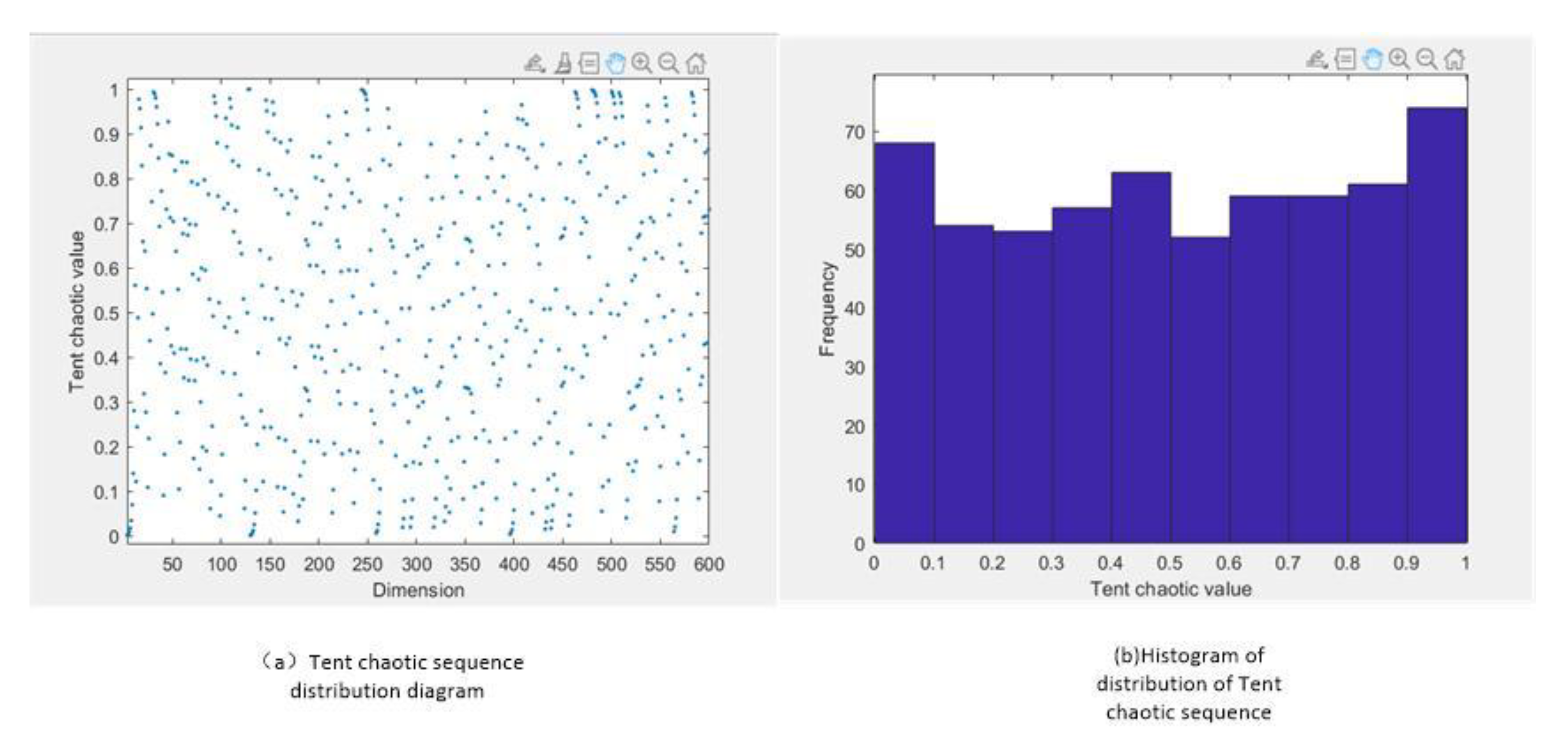
2.2.1. Tent Chaotic Mapping Initializes the Population
2.2.2. Explorer Location Update Improvements
2.2.3. Introduction of Gauss–Cauchy Mutation Strategy
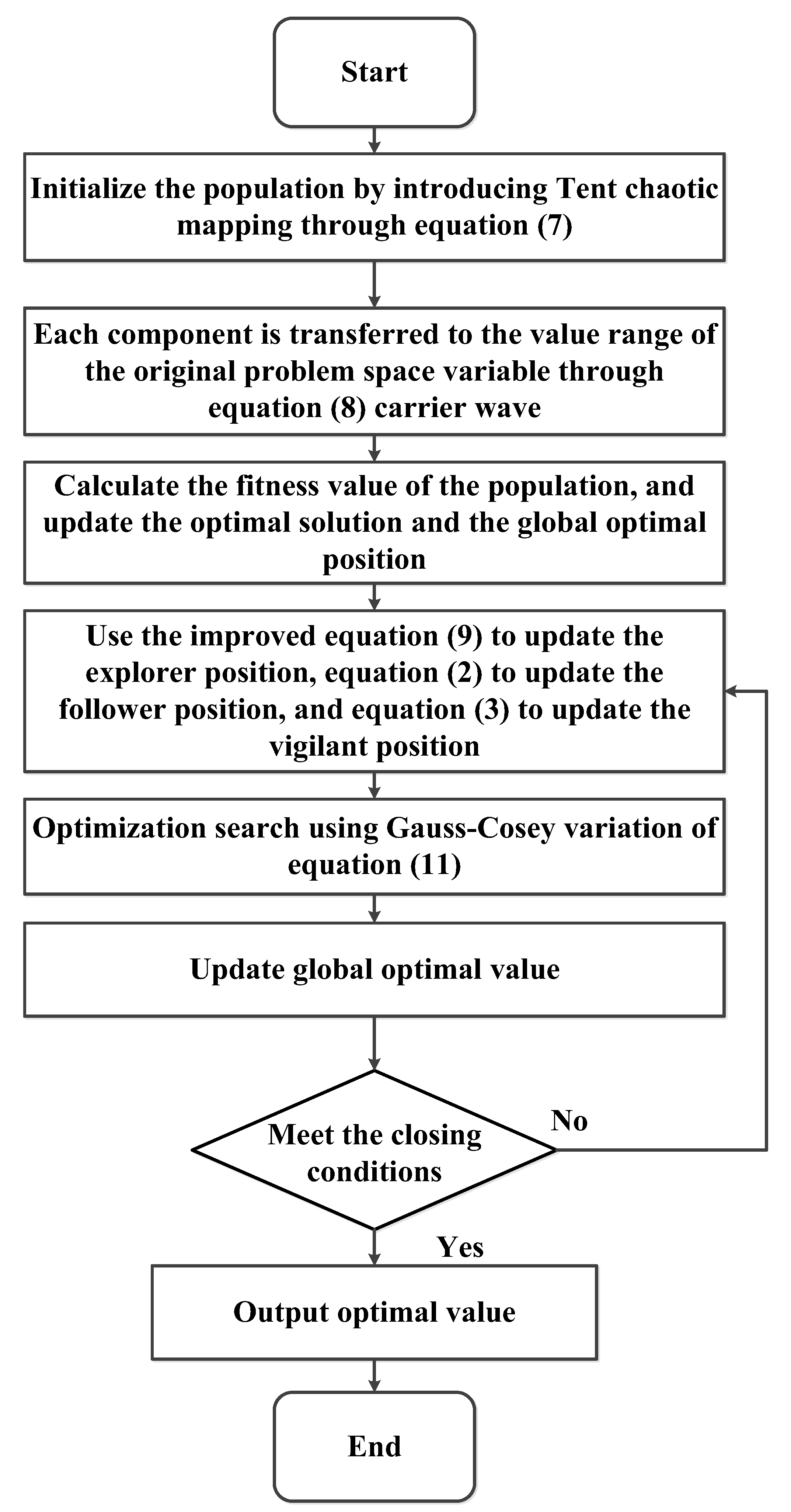
2.2.4. ISSA Implementation Steps and Flow Chart
3. Performance Analysis on Benchmark Functions
3.1. Selection of Test Functions
3.2. Experimental Environment and Comparison Algorithm Selection
3.3. Comparative Analysis of Performance Indicators
3.4. Running Time Comparison Analysis
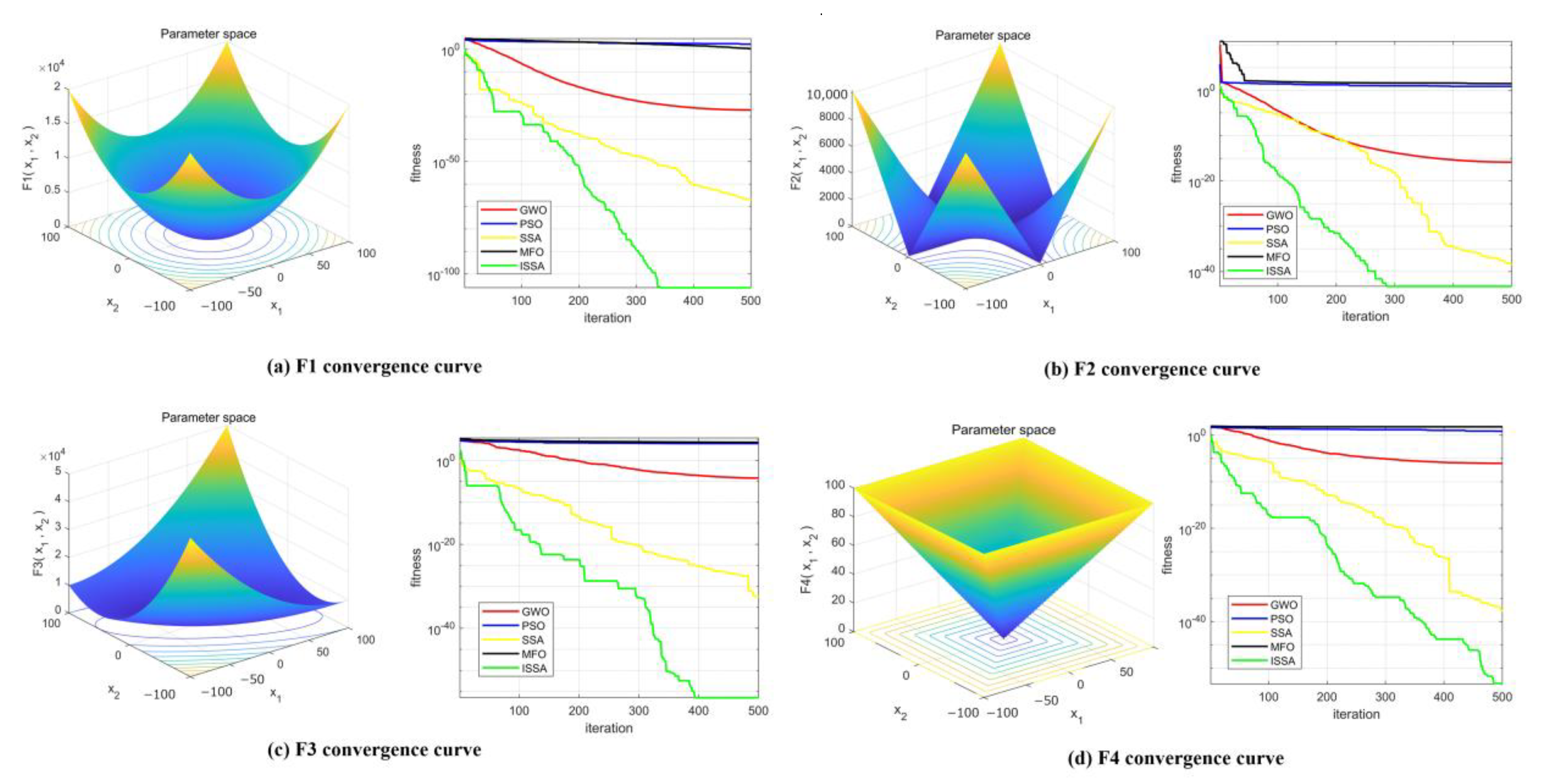
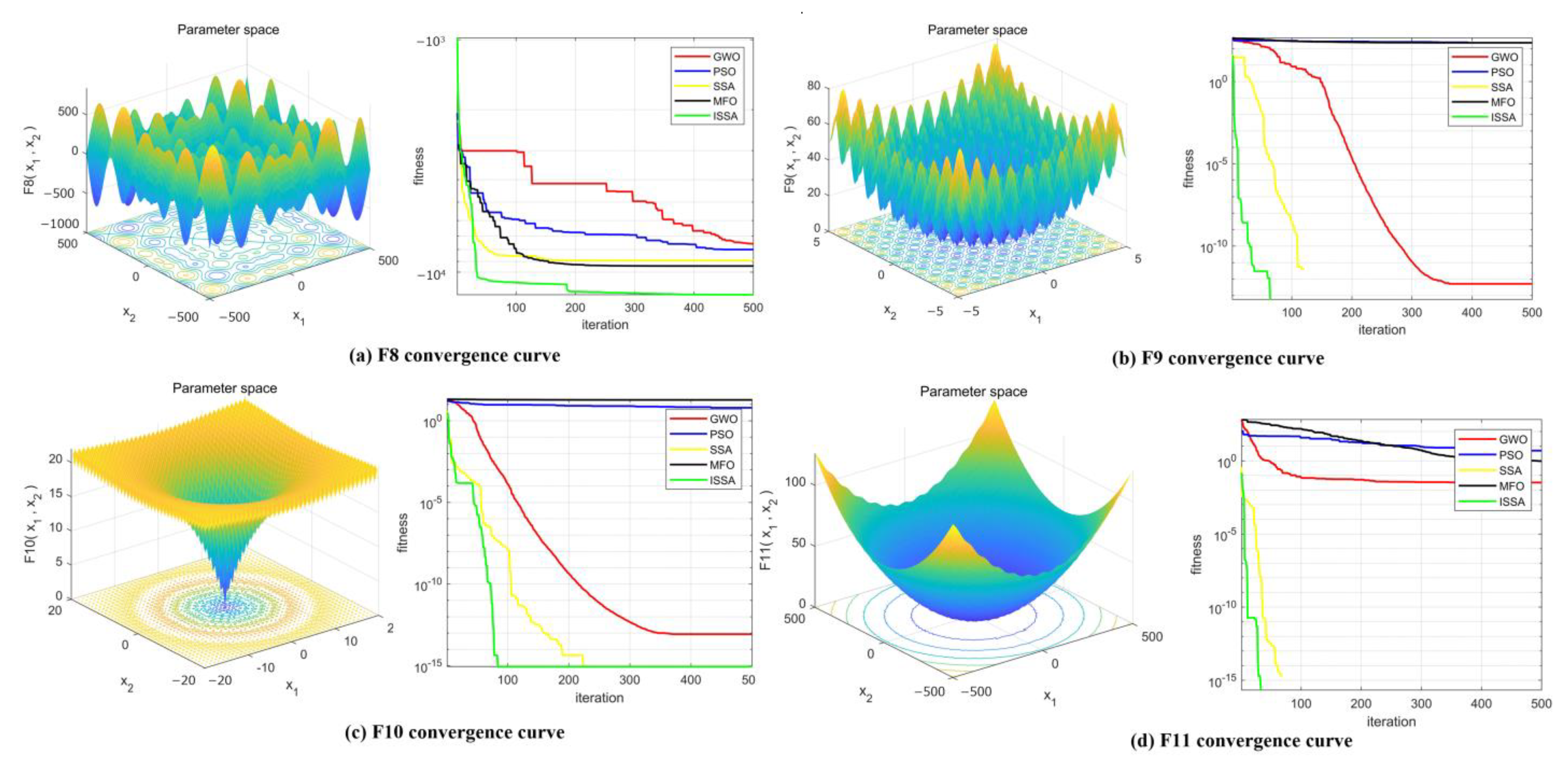
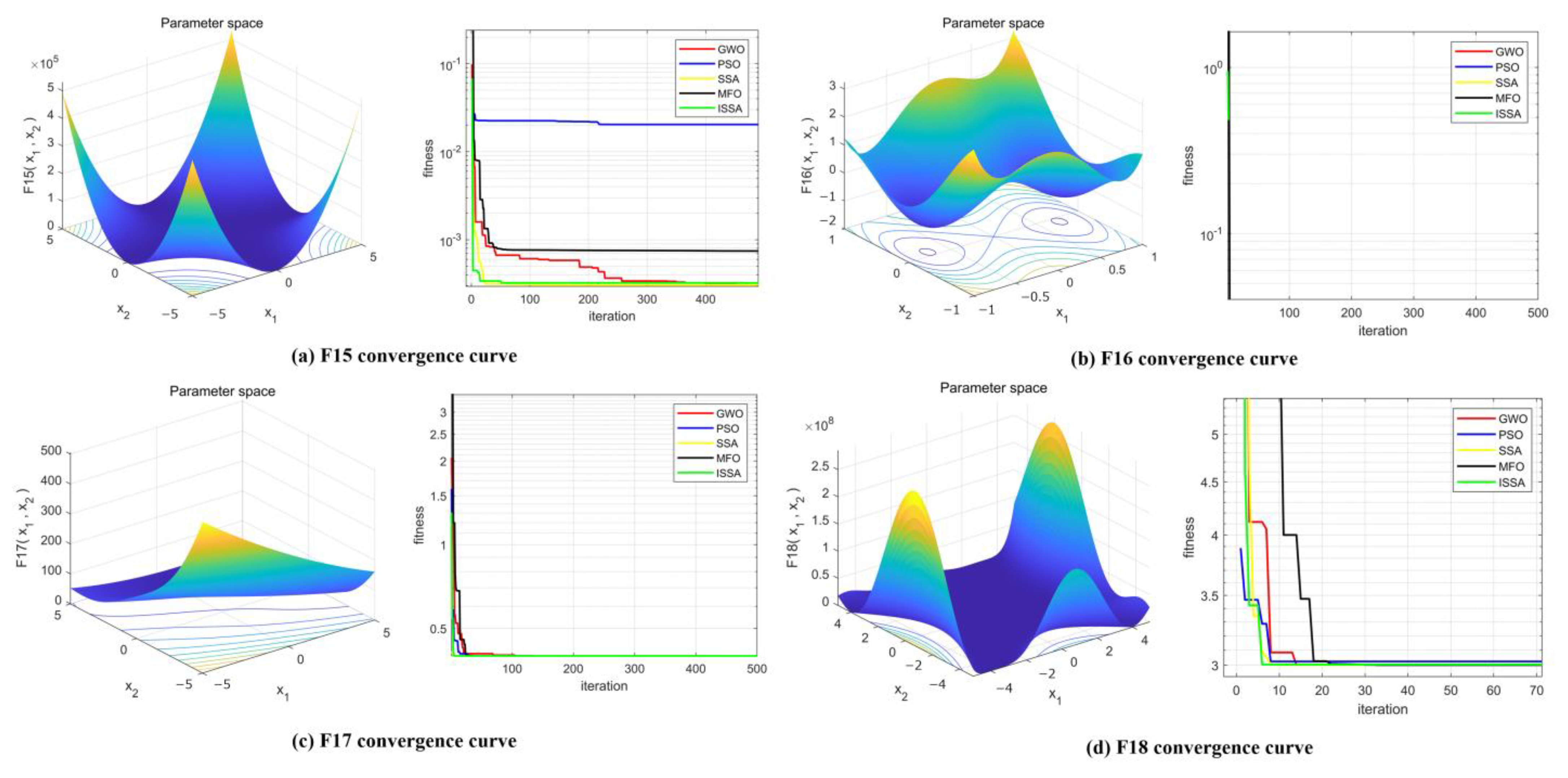
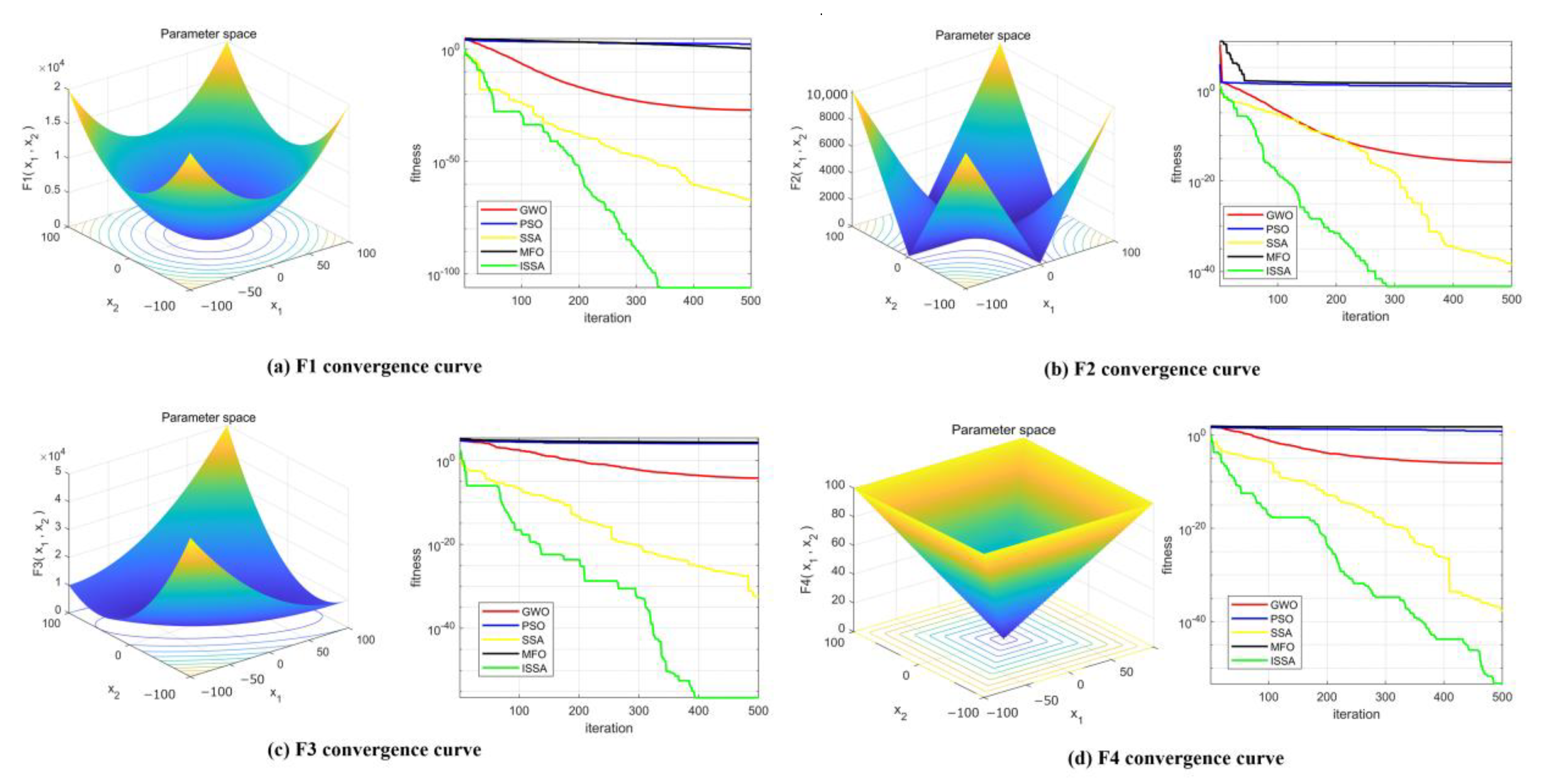
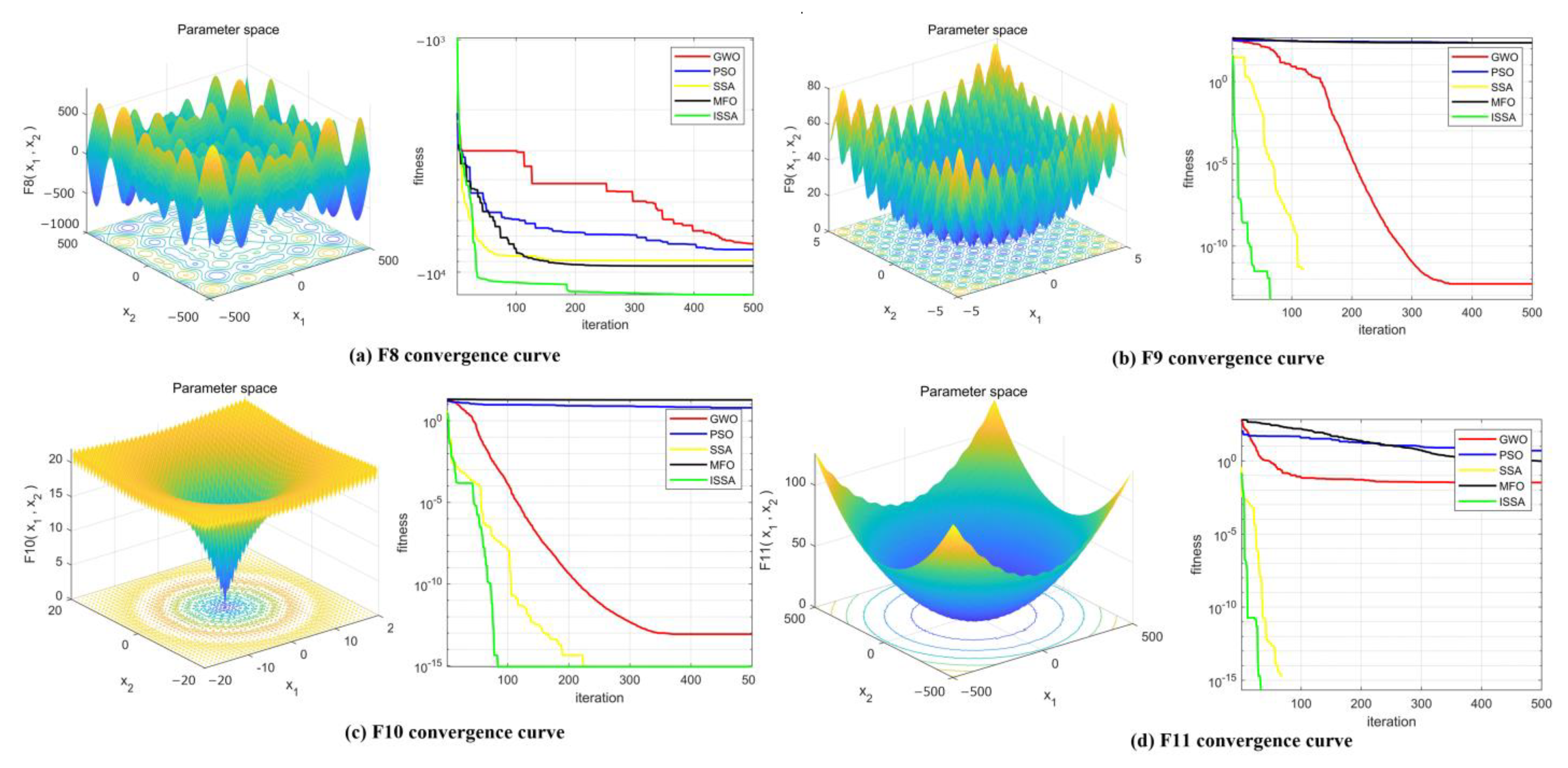
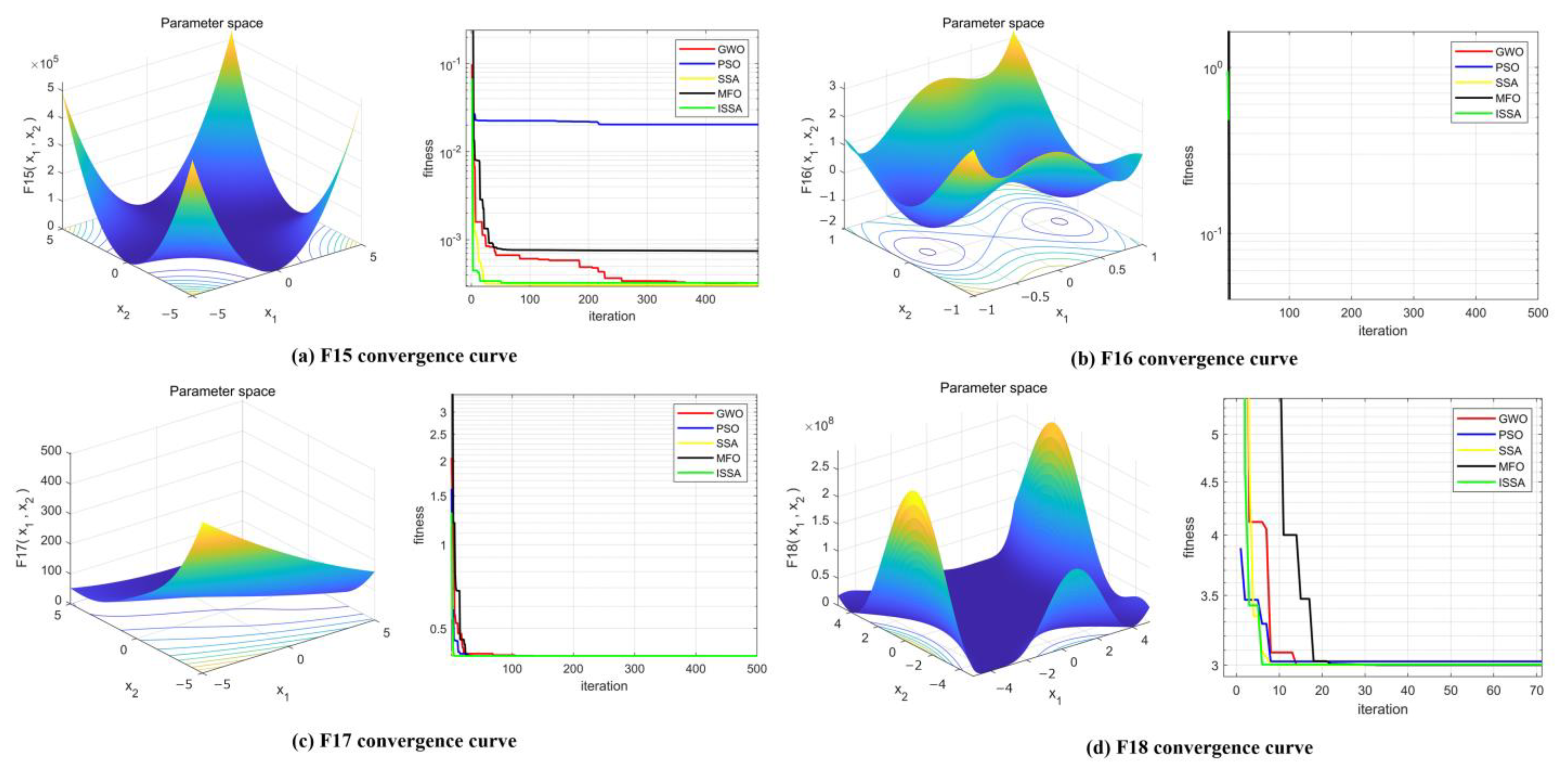
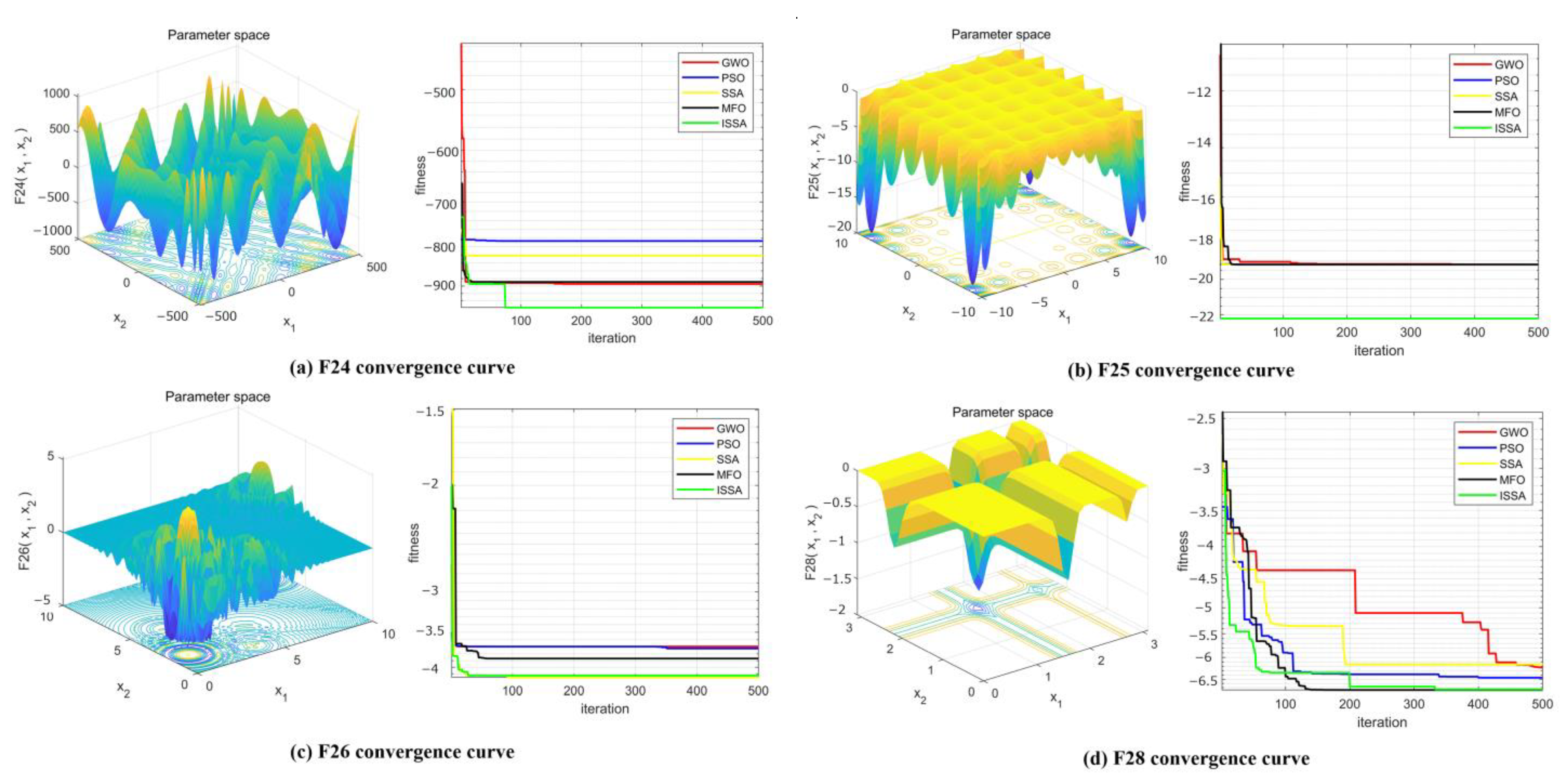
3.5. Comparison of Convergence Curves of Fitness Values
4. Performance Analysis of Reactor Model for Temperature Control
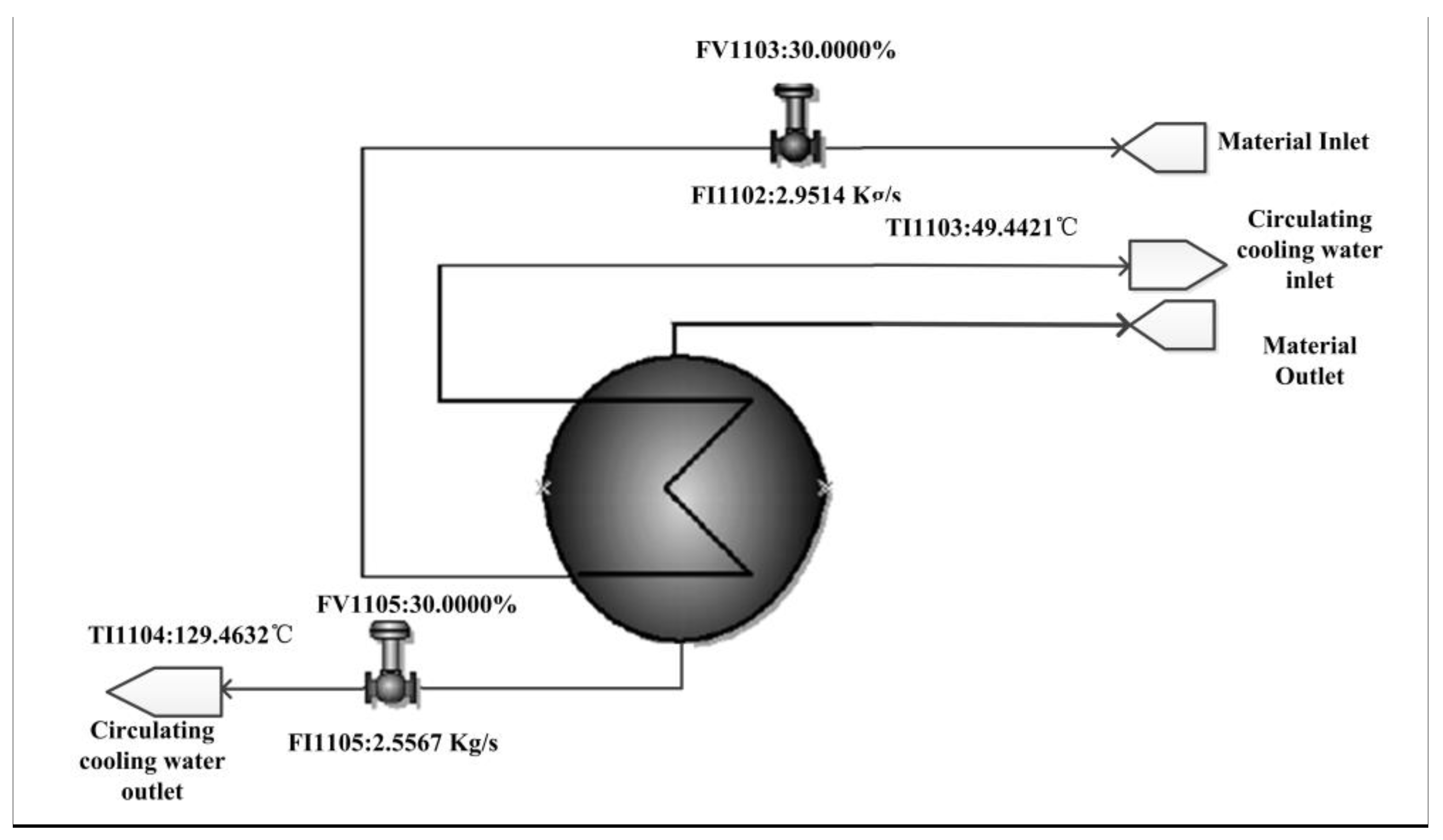
4.1. Reactor Temperature Control System Model
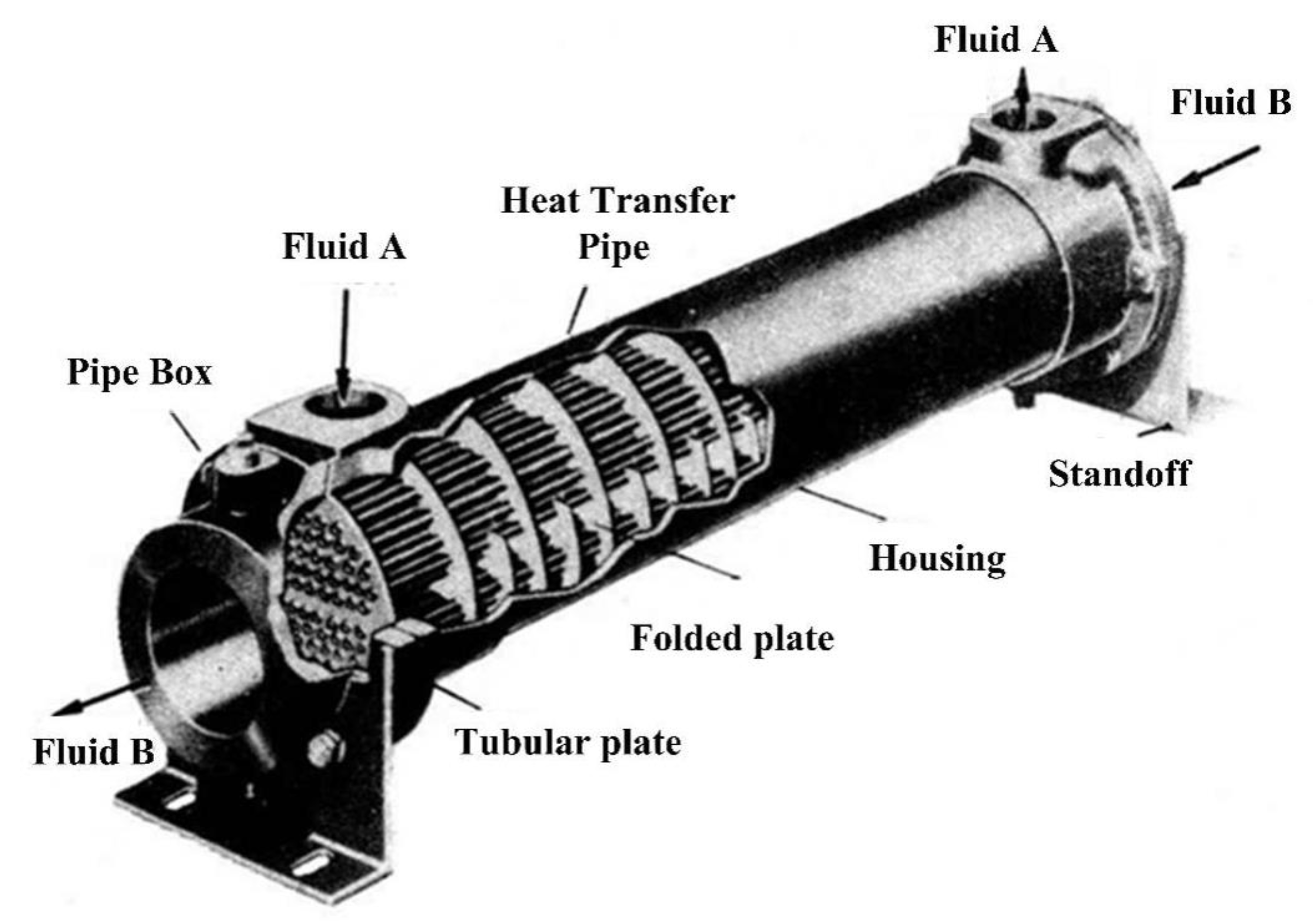
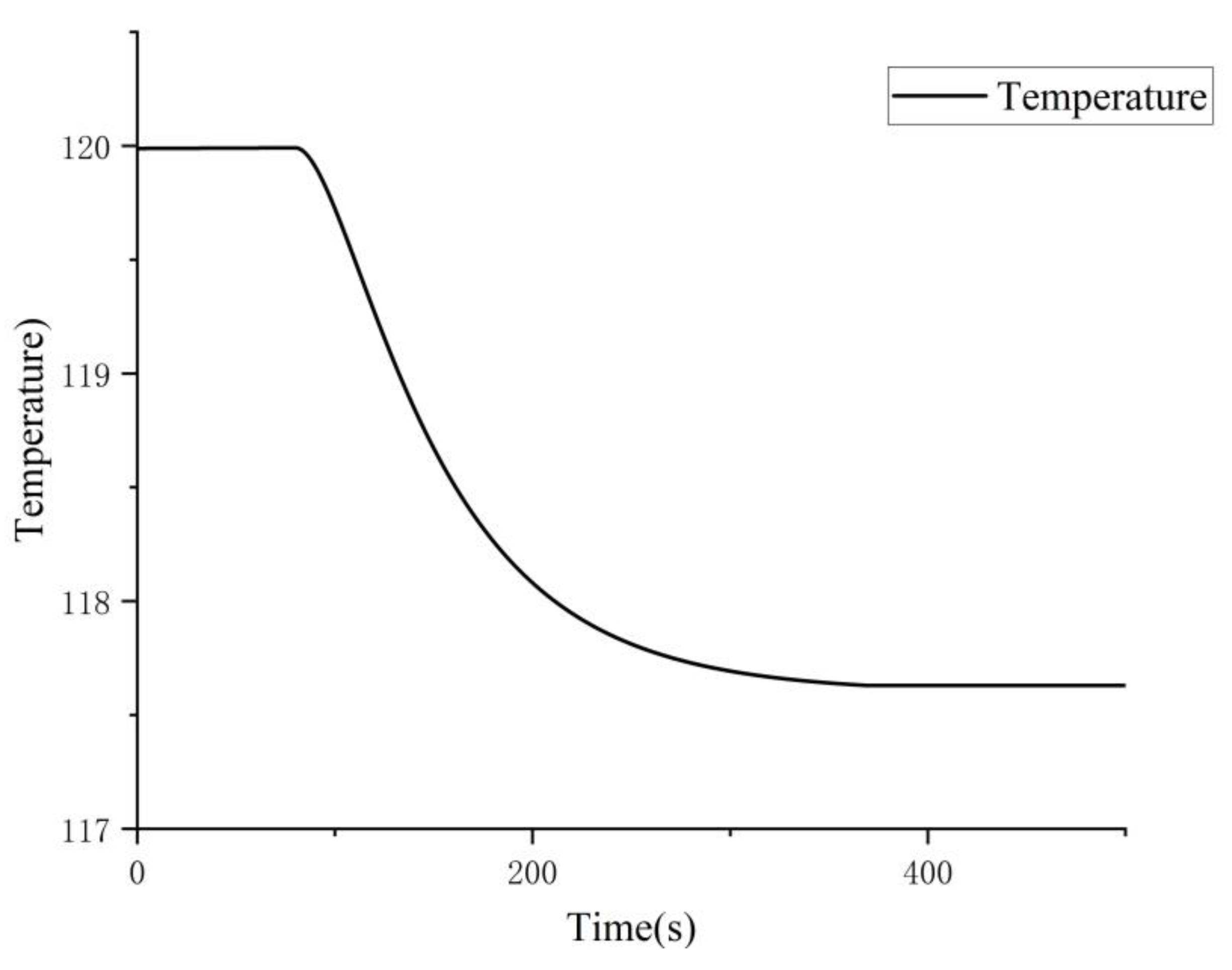
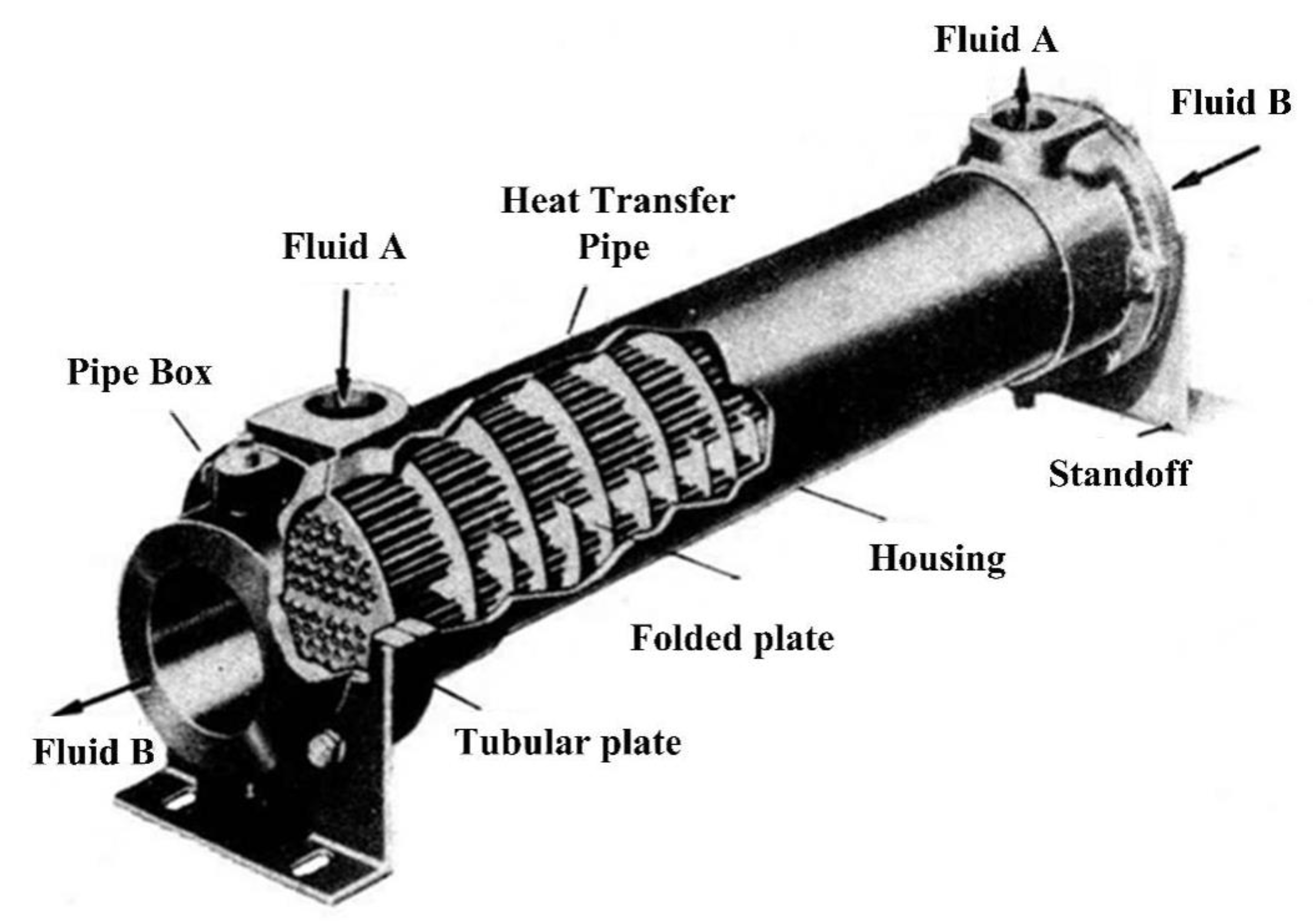
4.1.1. Heat Exchanger Description
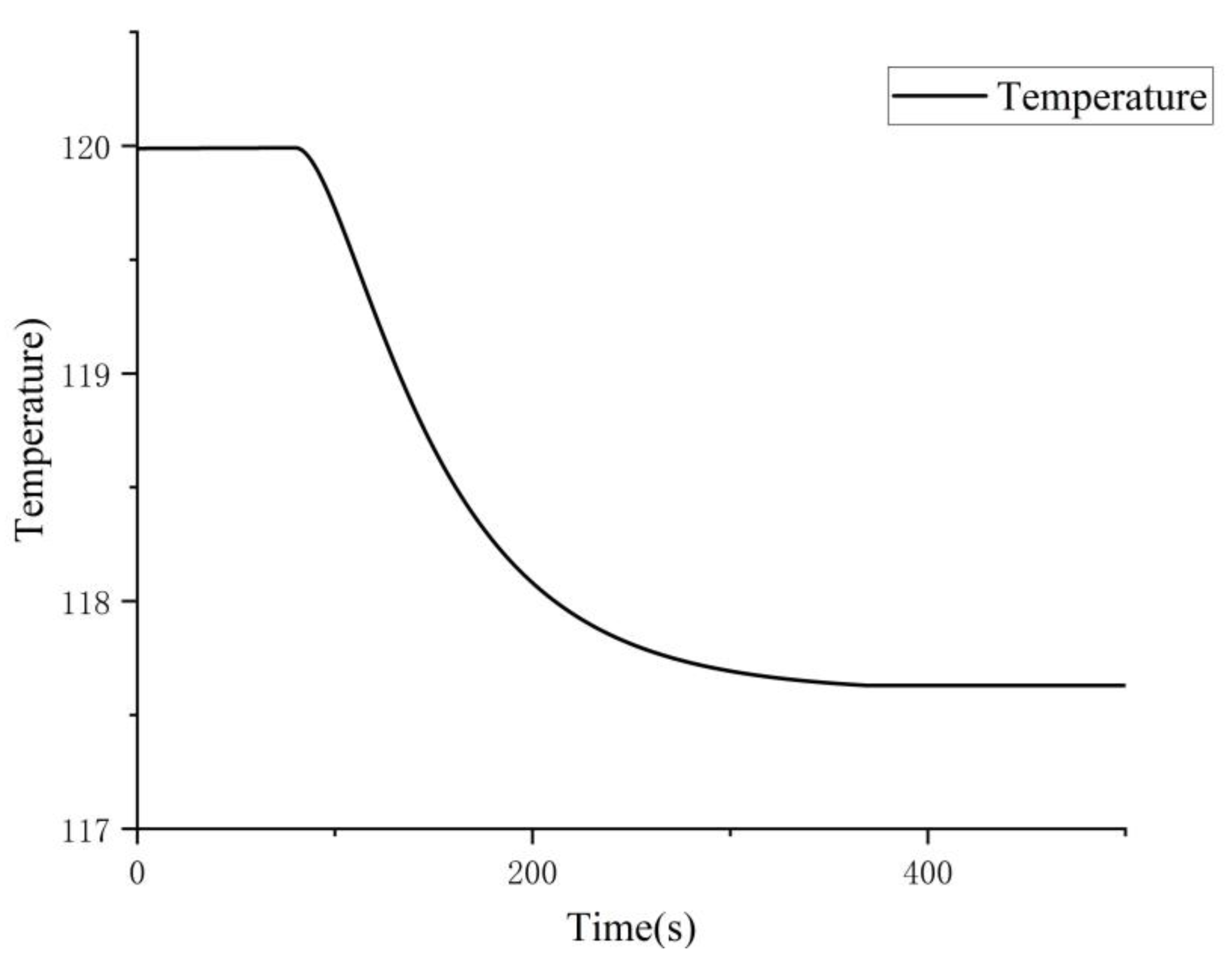
4.1.2. Heat Exchanger Model Identification
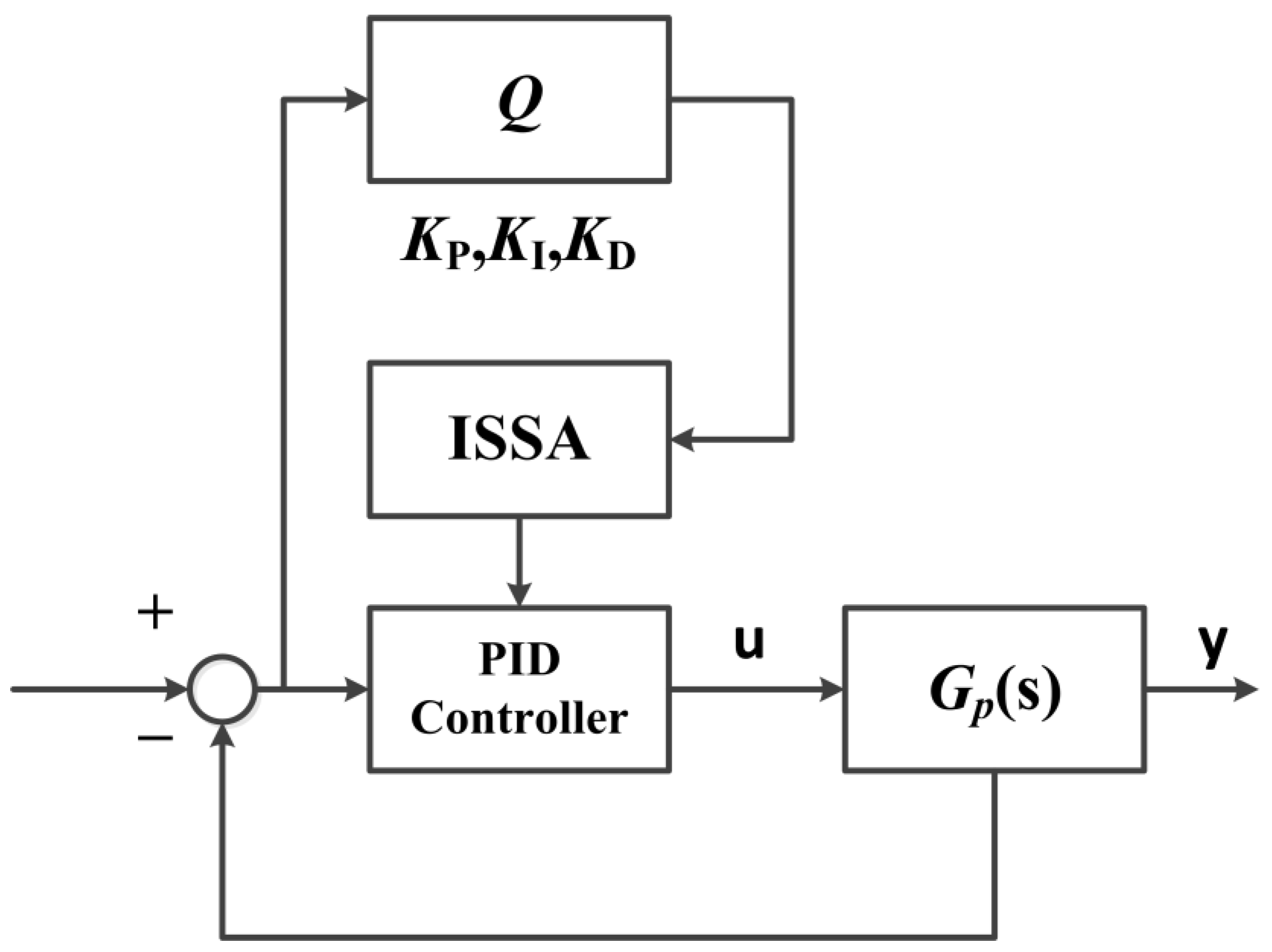
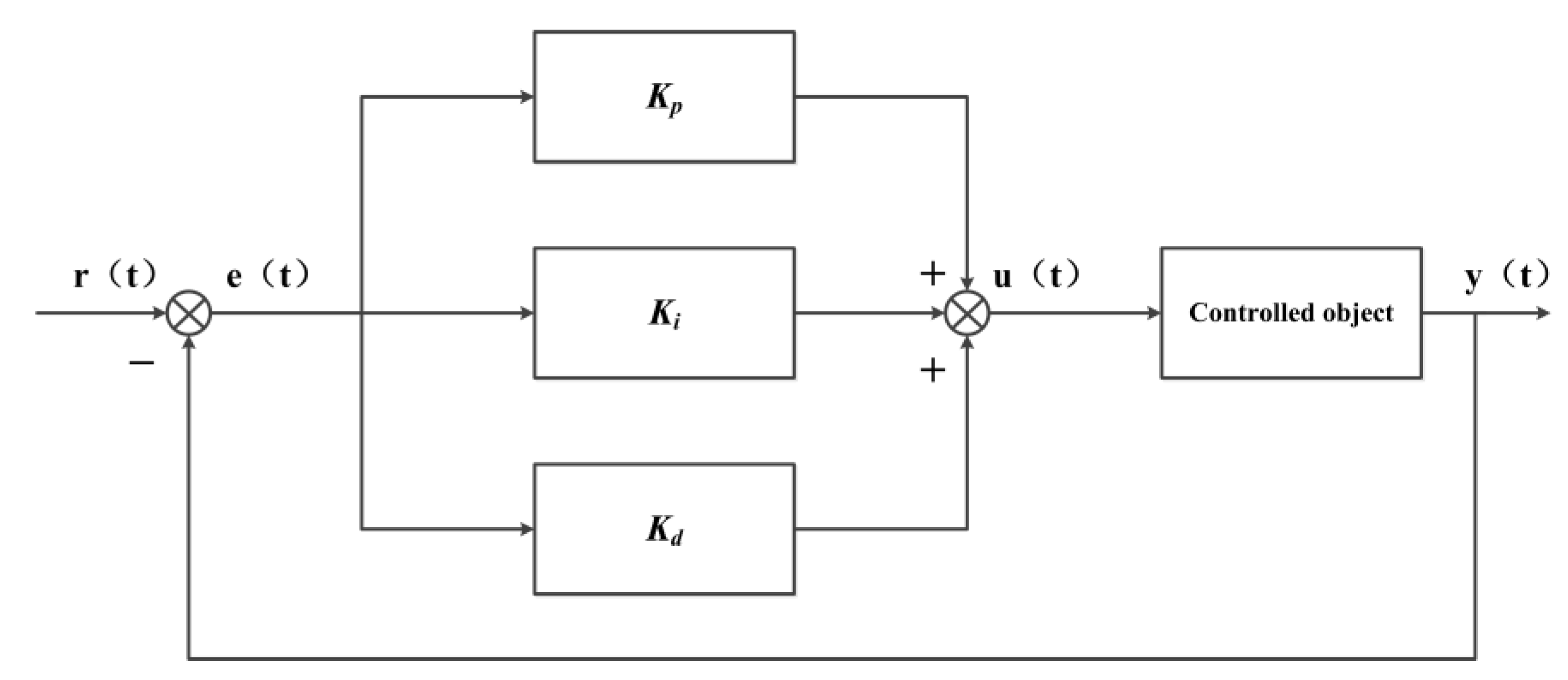
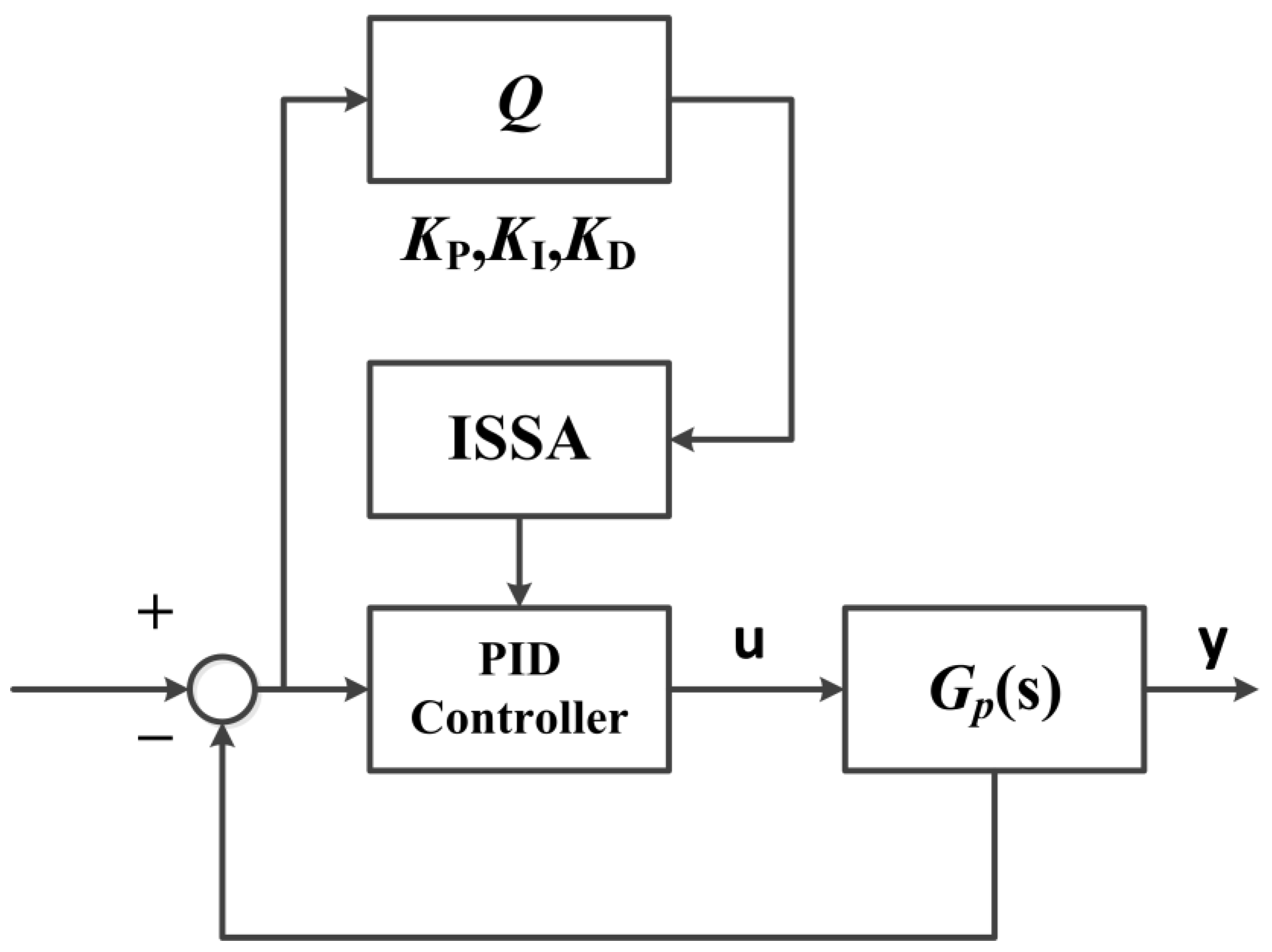
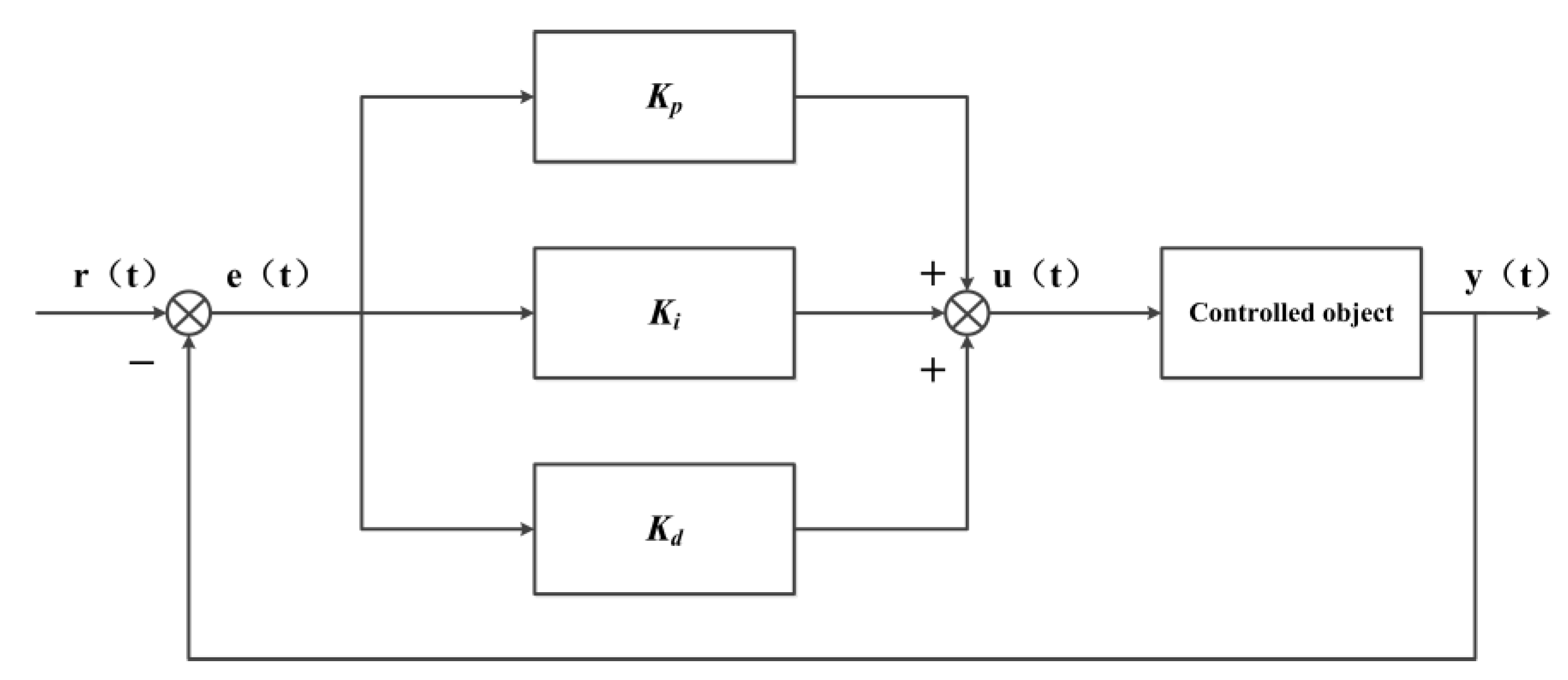
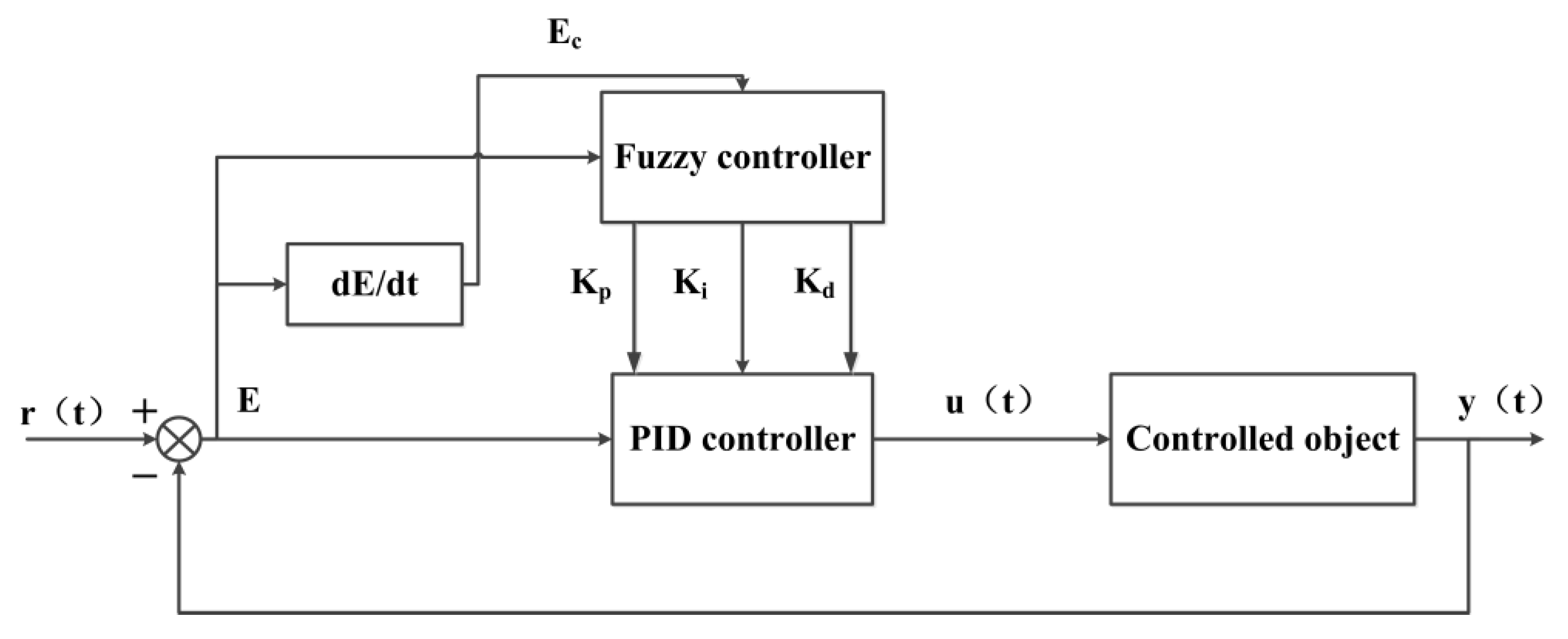
4.2. Controller Design
4.3. System Simulation and Results Analysis
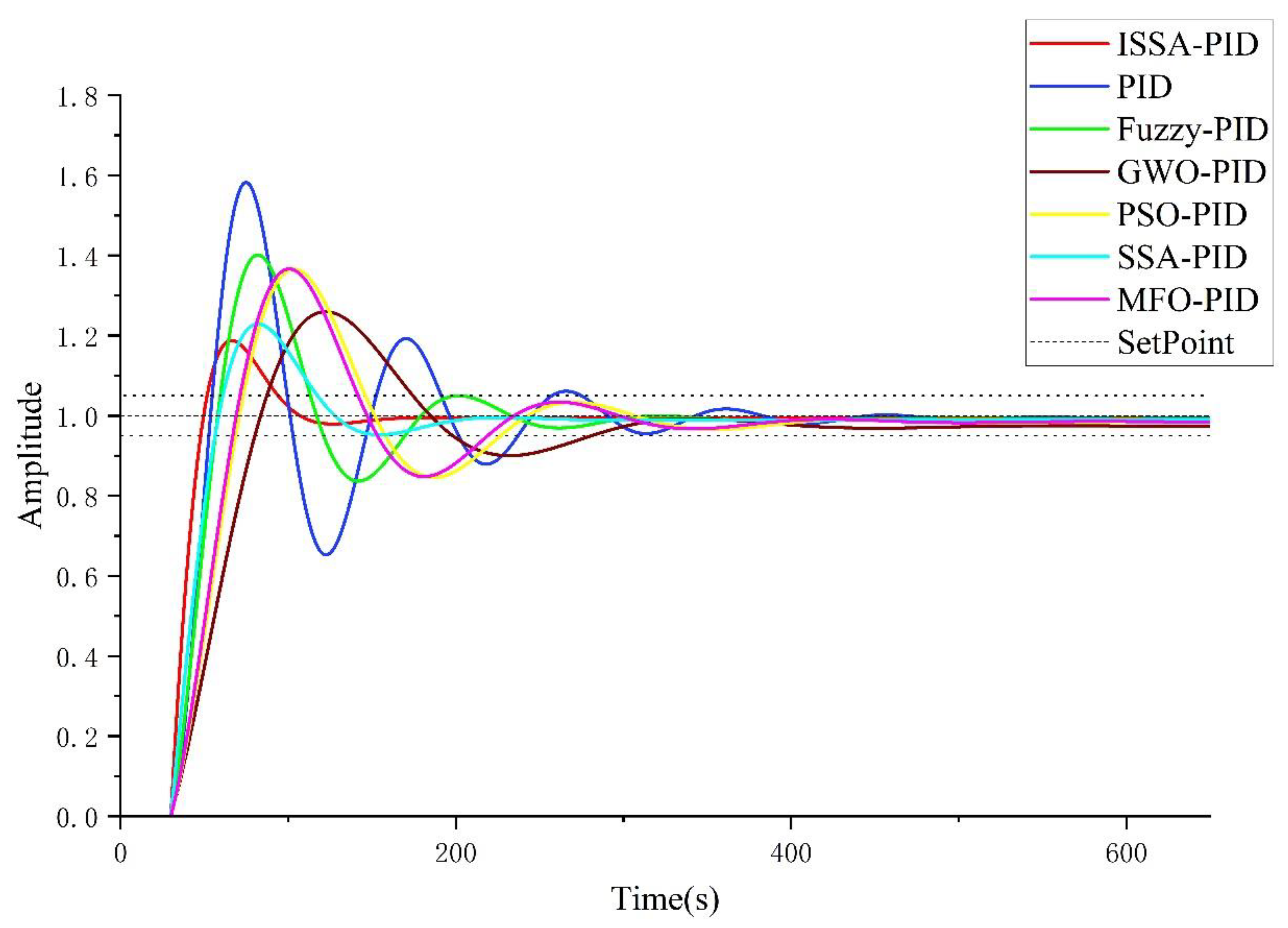
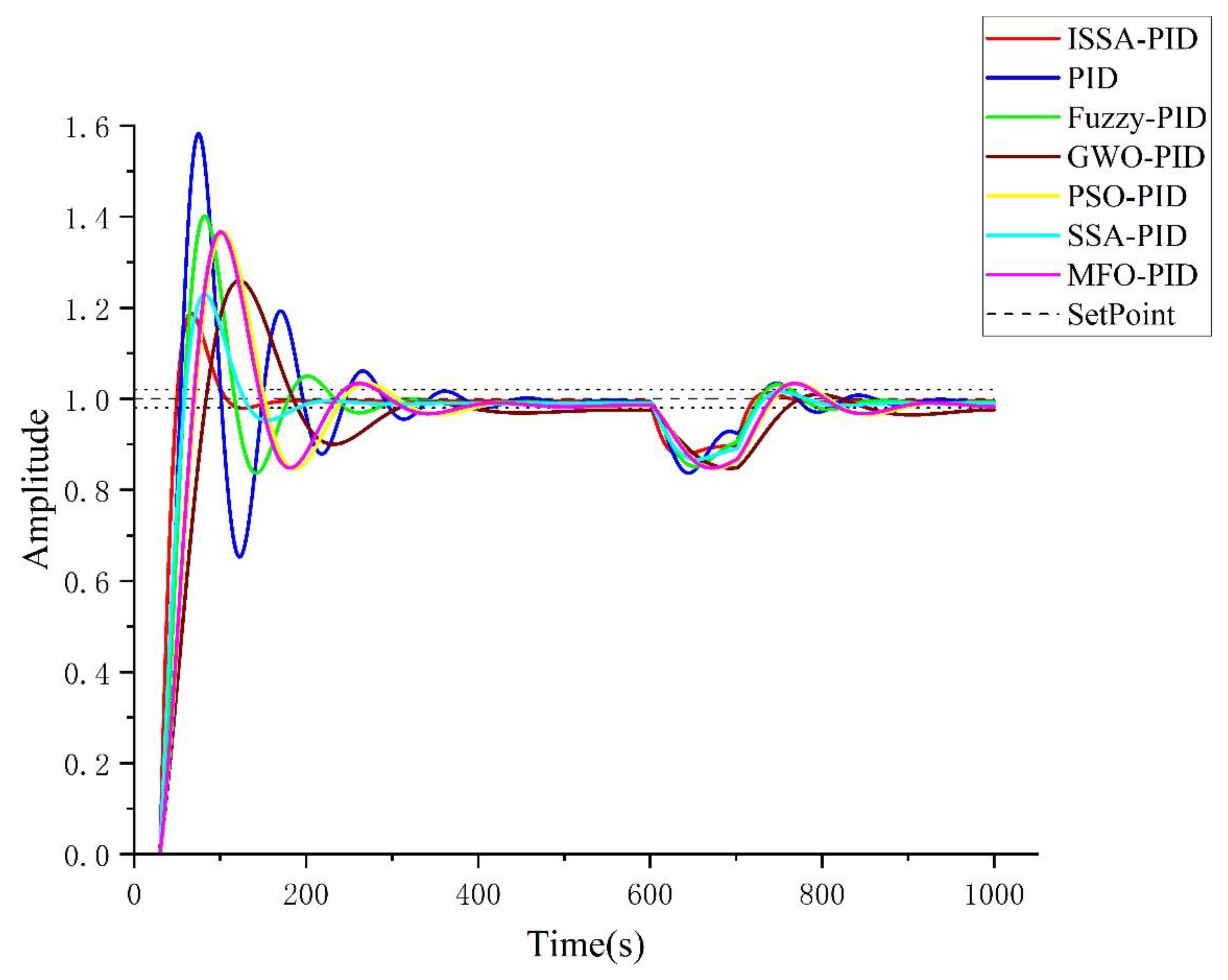
4.3.1. Build Simulation Platform and Preliminary Performances Comparison
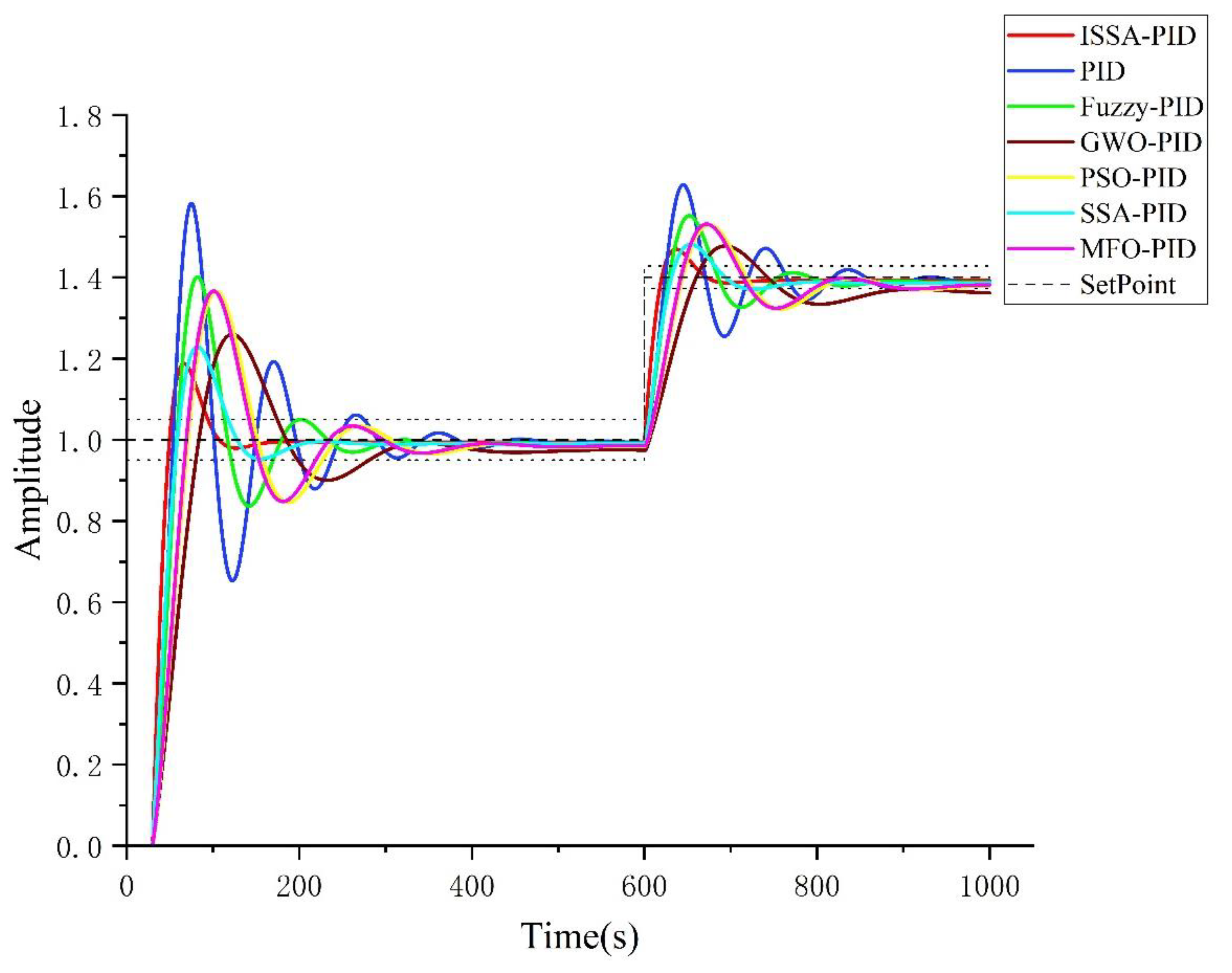
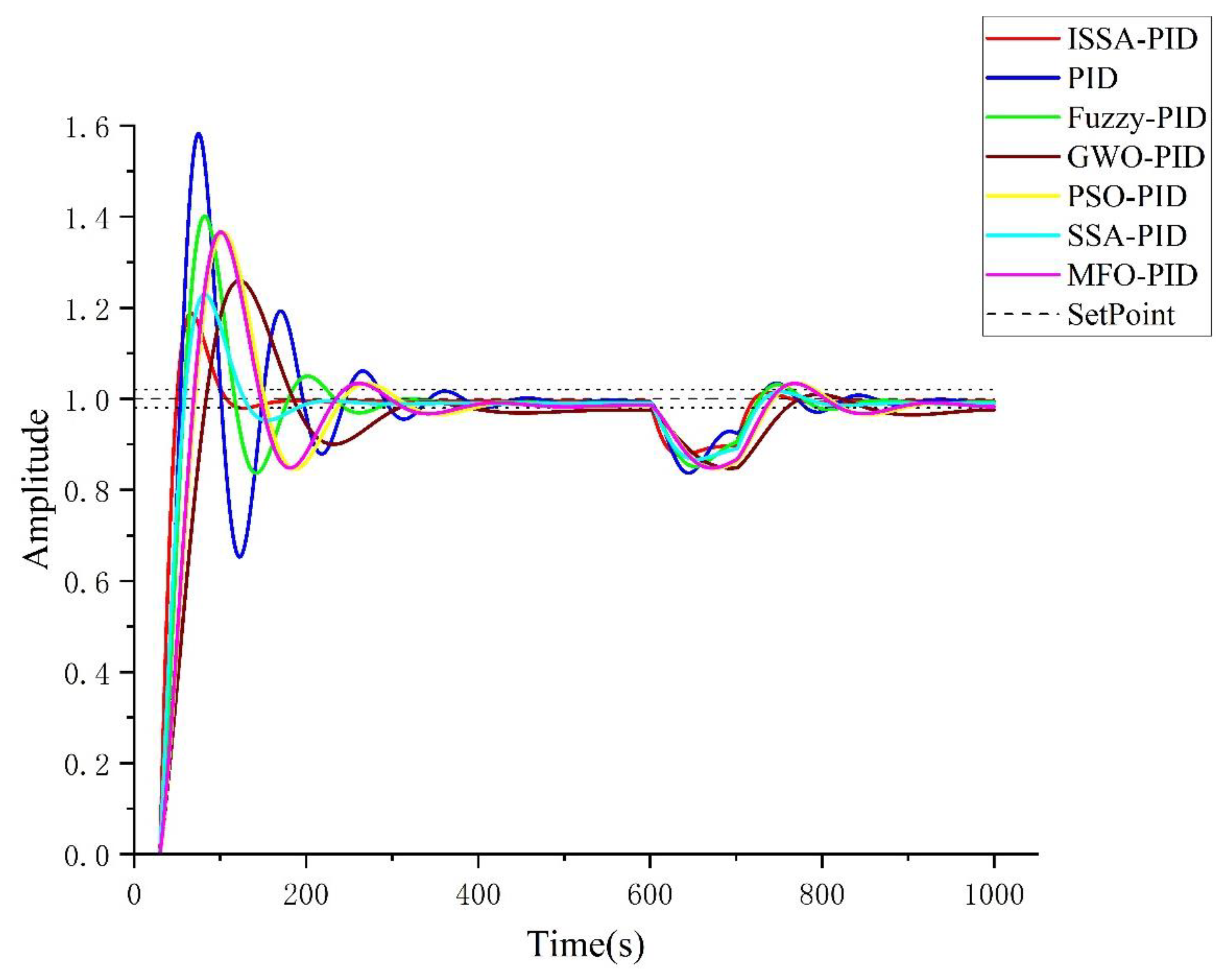
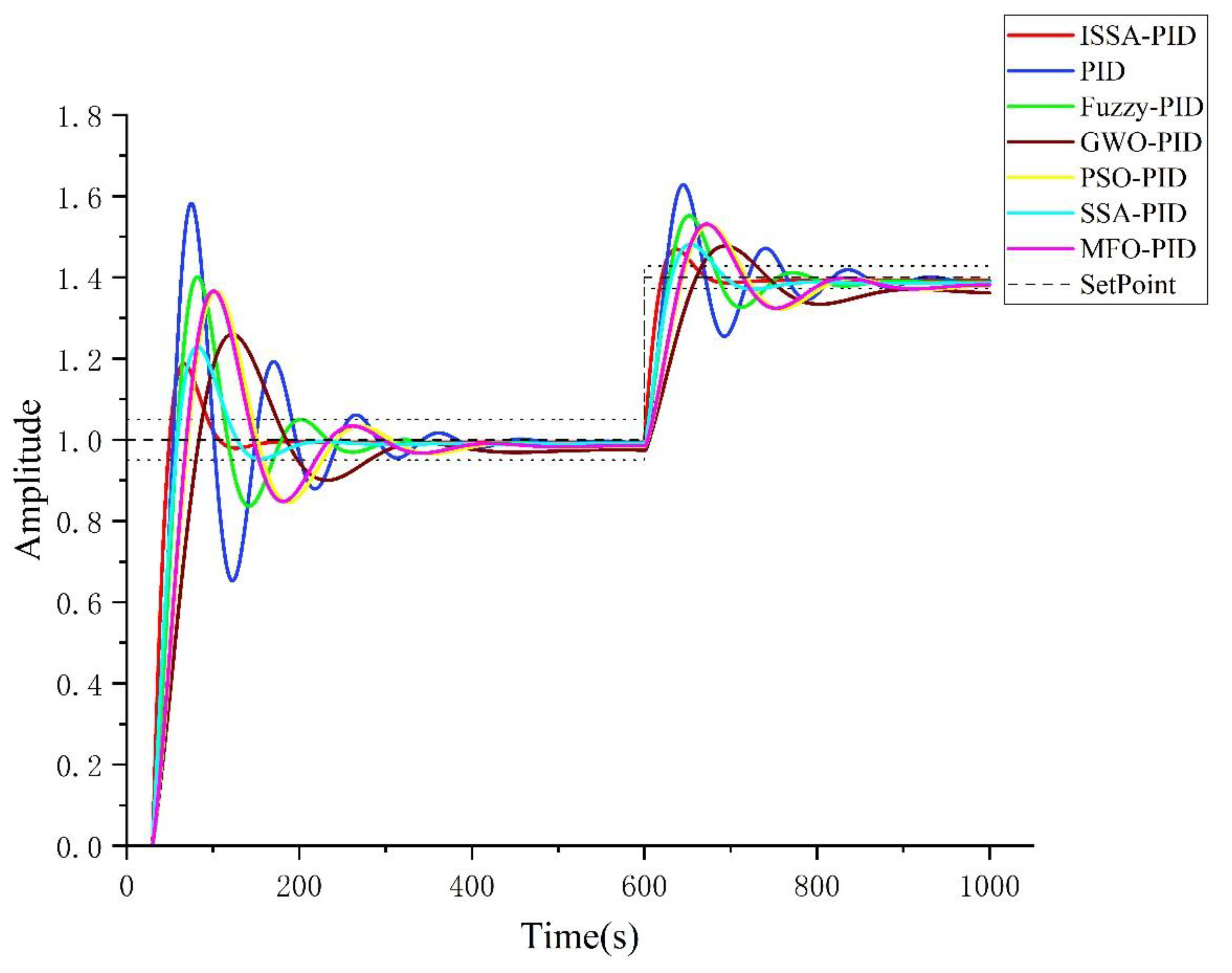
4.3.2. Liter Load Test
4.3.3. Perturbation Test
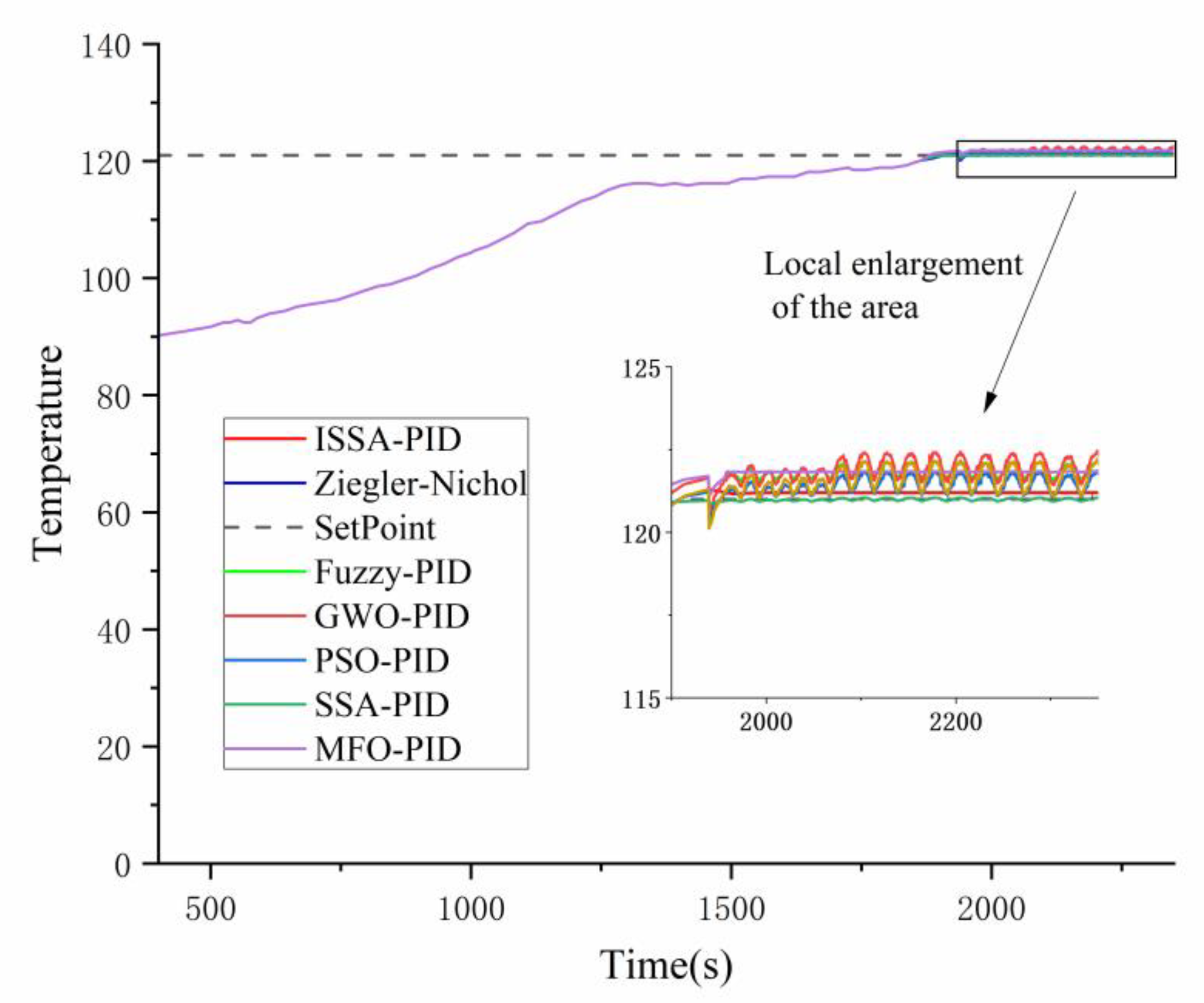
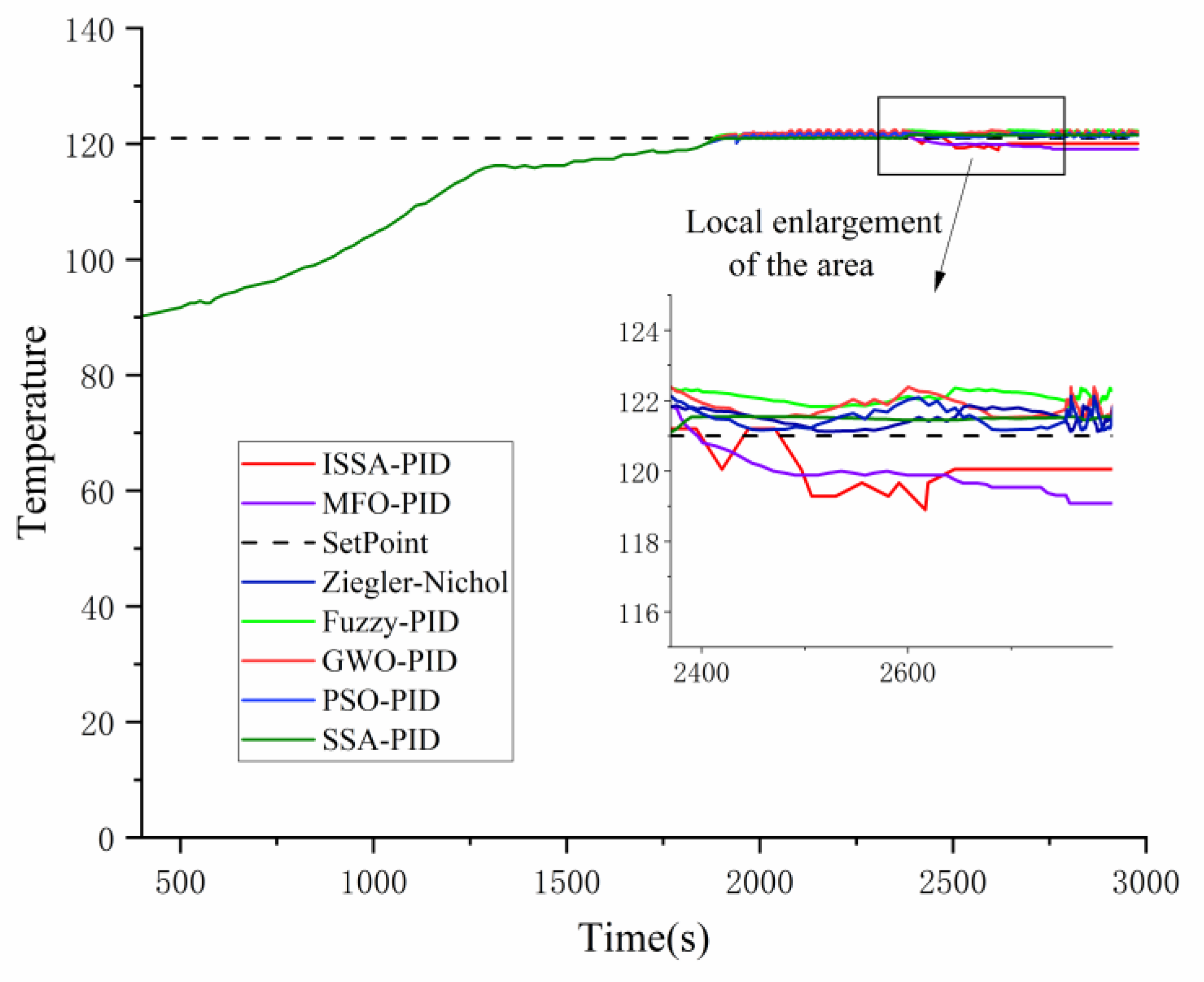
5. Performance Analysis on Semi-Physical Platform Validation
6. Conclusions and Future Perceptive
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, C.-F.; Wang, C.-C.; Tseng, C.-H. Methylamine removal using mixed bacterial strains in a continuous stirred tank reactor (CSTR) system. Int. Biodeterior. Biodegrad. 2013, 85, 583–586. [Google Scholar] [CrossRef]
- Gargouri, B.; Aloui, F.; Sayadi, S. Reduction of petroleum hydrocarbons content from an engine oil refinery wastewater using a continuous stirred tank reactor monitored by spectrometry tools. J. Chem. Technol. Biotechnol. 2012, 87, 238–243. [Google Scholar] [CrossRef]
- Vlassis, T.; Stamatelatou, K.; Antonopoulou, G. Methane production via anaerobic digestion of glycerol: A comparison of conventional (CSTR) and high-rate (PABR) digesters. J. Chem. Technol. Biotechnol. 2013, 88, 2000–2006. [Google Scholar] [CrossRef]
- Tobita, H. Free-Radical Polymerization with Long-Chain Branching and Scission in a Continuous Stirred-Tank Reactor. Macromolecular React. Eng. 2013, 7, 181–192. [Google Scholar] [CrossRef]
- Esfandyari, M.; Fanaei, M.A.; Zohreie, H. Adaptive fuzzy tuning of PID controllers. Neural Comput. Appl. 2013, 23, 19–28. [Google Scholar] [CrossRef]
- Atif, S.M.; Nishat, A.M.; Laskar, S.H. Control of nonlinear jacketed continuous stirred tank reactor using different control structures. J. Process Control. 2021, 108, 112–124. [Google Scholar]
- Djarum, D.H.; Ahmad, Z. Designing real time model mobile monitoring system for model predictive control in a nonlinear continuous stirred tank reactor. Asia-Pac. J. Chem. Eng. 2020, 15, e2430. [Google Scholar] [CrossRef]
- Alshammari, O.; Mahyuddin, M.N.; Jerbi, H. An Advanced PID Based Control Technique With Adaptive Parameter Scheduling for A Nonlinear CSTR Plant. IEEE Access 2019, 7, 158085–158094. [Google Scholar] [CrossRef]
- Sudhanan, R.M.; Poongodi, D.P. Comparative Analysis of Various Control Strategies for a Nonlinear CSTR System. Int. J. Nonlinear Sci. Numer. Simul. 2017, 18, 269–276. [Google Scholar] [CrossRef]
- Chopra, V.; Singla, S.K.; Dewan, L. Comparative Analysis of Tuning a PID Controller using Intelligent Methods. Acta Polytech. Hung. 2014, 11, 235–249. [Google Scholar]
- Mukherjee, D.; Raja, G.L.; Kundu, P.; Ghosh, A. Improved fractional augmented control strategies for continuously stirred tank reactors. Asian J. Control 2022, 10, 1002. [Google Scholar] [CrossRef]
- Stavrov, D.; Nadzinski, G.; Deskovski, S.; Stankovski, M. Quadratic Model-Based Dynamically Updated PID Control of CSTR System with Varying Parameters. Algorithms 2021, 14, 31. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control. Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Li, Q.; Shi, Y.; Lin, R.; Qiao, W.; Ba, W. A novel oil pipeline leakage detection method based on the sparrow search algorithm and CNN. Measurement 2022, 204, 112122. [Google Scholar] [CrossRef]
- Xu, J.-H.; Xu, H.-Z.; Ding, Q.; Zhu, K.-Q.; Yang, Y.-R.; Wang, Y.-L.; Huang, T.-M.; Chen, X.; Wan, Z.-M.; Wang, X.-D. Sparrow search algorithm applied to temperature control in PEM fuel cell systems. Int. J. Hydrog. Energy 2022, 47, 39973–39986. [Google Scholar] [CrossRef]
- Duan, M.; Yang, Z.; Zhao, Y.; Fang, L.; Zuo, H.; Li, Z.; Wang, D. Wavefront shaping using improved sparrow search algorithm to control the scattering light field. Opt. Laser Technol. 2022, 156, 108529. [Google Scholar] [CrossRef]
- Sun, C.; Liu, P.; Guo, H.; Di, Y.; Xu, Q.; Hao, X. Control of Precalciner Temperature in the Cement Industry: A Novel Method of Hammerstein Model Predictive Control with ISSA. Processes 2023, 11, 214. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, J.; Qin, T.; Fan, Y.; Li, Z.; Wei, W. A Multi-Strategy Improved Sparrow Search Algorithm for Solving the Node Localization Problem in Heterogeneous Wireless Sensor Networks. Appl. Sci. 2022, 12, 5080. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhuang, M.; Liu, H.; Zhu, Y. Optimal Control of Chilled Water System Based on Improved Sparrow Search Algorithm. Buildings 2022, 12, 269. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, S.; Yu, Y.; Wang, Z.; Cheng, J.; Yuki, T. A Gravitational Search Algorithm With Chaotic Neural Oscillators. IEEE Access 2020, 8, 25938–25948. [Google Scholar] [CrossRef]
- Tanyildizi, E.; Demir, G. Golden Sine Algorithm: A Novel Math-Inspired Algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]
- Wang, W.C.; Xu, L.; Chau, K.W.; Xu, D.M. Yin-Yang firefly algorithm based on dimensionally Cauchy mutation. Expert Syst. Appl. 2020, 150, 113216. [Google Scholar] [CrossRef]
- Saeed, S.; Ong, H.C.; Sathasivam, S. Self-Adaptive Single Objective Hybrid Algorithm for Unconstrained and Constrained Test functions: An Application of Optimization Algorithm. Arab. J. Sci. Eng. 2019, 44, 3497–3513. [Google Scholar] [CrossRef]
- Kohli, M.; Arora, S. Chaotic grey wolf optimization algorithm for constrained optimization problems. J. Comput. Des. Eng. 2018, 5, 458–472. [Google Scholar] [CrossRef]
- Cruz, L.M.; Alvarez, D.L.; Al-Sumaiti, A.S.; Rivera, S. Load Curtailment Optimization Using the PSO Algorithm for Enhancing the Reliability of Distribution Networks. Energies 2020, 13, 3236. [Google Scholar] [CrossRef]
- Bingul, Z.; Karahan, O. Comparison of PID and FOPID controllers tuned by PSO and ABC algorithms for unstable and integrating systems with time delay. Optim. Control. Appl. Methods 2018, 39, 1431–1450. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, H.; Luo, J.; Zhang, Q.; Jiao, S.; Zhang, X. Enhanced Moth-flame optimizer with mutation strategy for global optimization. Inf. Sci. 2019, 492, 181–203. [Google Scholar] [CrossRef]
- Kazemi, Z.; Safavi, A.A.; Pouresmaeeli, S.; Naseri, F. A practical framework for implementing multivariate monitoring techniques into distributed control system. Control. Eng. Pract. 2019, 82, 118–129. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Function Name | Dimensionality | Search Space | Optimum Value |
|---|---|---|---|---|
| High-dimensional unimodal | Sphere(F1) | 30 | [−100, 100] | 0 |
| Schwefel 2.22(F2) | 30 | [−10, 10] | 0 | |
| Schwefel 1.2(F3) | 30 | [−100, 100] | 0 | |
| Schwefel 2.21(F4) | 30 | [−100, 100] | 0 | |
| Generalized Rosenbrock(F5) | 30 | [−30, 30] | 0 | |
| Step Function(F6) | 30 | [−100, 100] | 0 | |
| Quartic(F7) | 30 | [−1.28, 1.28] | 0 | |
| High-dimensional multimodal | Schwefel2.26(F8) | 30 | [−500, 500] | −12,569.5 |
| Rastrigin(F9) | 30 | [−5.12, 5.12] | 0 | |
| Ackley(F10) | 30 | [−32, 32] | 0 | |
| Griewank(F11) | 30 | [−600, 600] | 0 | |
| Generalized Penalized Function 1(F12) | 30 | [−50, 50] | 0 | |
| Generalized Penalized Function 2(F13) | 30 | [−50, 50] | 0 | |
| Fixed-dimension multimodal | Shekel's Foxholes(F14) | 2 | [−65.53, 65.53] | 1 |
| Kowalik(F15) | 4 | [−5, 5] | 0.0003075 | |
| Six-Hump Camel-Back(F16) | 2 | [−5, 5] | −1.031628 | |
| Branin(F17) | 2 | lb = [−5, 0] ub = [10, 15] | 0.398 | |
| Goldstein-Price(F18) | 2 | [−2, 2] | 3 | |
| Hartman's Family n = 3(F19) | 3 | [0, 1] | −3.98 | |
| Hartman's Family n = 6(F20) | 6 | [0, 1] | −3.32 | |
| Shekel's Family m = 5(F21) | 4 | [0, 10] | −10.536 | |
| Shekel's Family m = 7(F22) | 4 | [0, 10] | −10.536 | |
| Shekel's Family m = 10(F23) | 4 | [0, 10] | −10.536 | |
| Complicated | Eggholder(F24) | 2 | [−512, 512] | −959.6407 |
| Holder Table(F25) | 2 | [−10, 10] | −19.2085 | |
| Langermann(F26) | 2 | [0, 10] | −4.1558 | |
| Levy N.13(F27) | 2 | [−10, 10] | 0 | |
| Michalewicz(F28) | 10 | [0, π] | −9.66015 | |
| Three-Hump Camel(F29) | 2 | [−5, 5] | 0 | |
| Perm Function 0, d, β(F30) | 10 | [−10, 10] | 0 |
| Type | Function | GWO | PSO | MFO | SSA | ISSA |
|---|---|---|---|---|---|---|
| High-dimensional unimodal | F1 | 1.071 × 10−27 | 334.718 | 2.071 | 4.821 × 10−98 | 6.15 × 10−145 |
| F2 | 1.054 × 10−18 | 15.051 | 30.111 | 1.232 × 10−42 | 1.633 × 10−43 | |
| F3 | 1.212 × 10−8 | 5.105 × 103 | 2.037 × 104 | 1.054 × 10−27 | 3.549 × 10−34 | |
| F4 | 4.282 × 10−7 | 6.821 | 70.487 | 5.355 × 10−29 | 1.091 × 10−50 | |
| F5 | 0.446 | 1.101 × 104 | 1.919 × 103 | 6.978 × 10−5 | 1.076 × 10−7 | |
| F6 | 0.504 | 355.921 | 990.794 | 3.324 × 10−6 | 1.339 × 10−12 | |
| F7 | 1.300 × 10−3 | 0.535 | 2.528 | 1.200 × 10−3 | 6.225 × 10−5 | |
| High-dimensional multimodal | F8 | −9.70 × 103 | −6.266 × 103 | −4.05 × 103 | −1.25 × 104 | −1.25 × 104 |
| F9 | 0 | 1.0267 × 102 | 1.550 × 102 | 0 | 0 | |
| F10 | 8.882 × 10−16 | 4.5047 | 5.393 | 8.882 × 10−16 | 8.882 × 10−16 | |
| F11 | 0.001 | 0 | 4.931 | 0 | 0 | |
| F12 | 0.033 | 5.647 | 32.821 | 1.050 × 10−7 | 2.233 × 10−13 | |
| F13 | 0.616 | 9.983 | 6.258 | 9.574 × 10−9 | 4.573 × 10−14 | |
| Fixed-dimension multimodal | F14 | 2.9821 | 1.003 | 0.998 | 2.982 | 0.998 |
| F15 | 3.378 × 10−4 | 0.023 | 7.837 × 10−4 | 3.378 × 10−4 | 3.132 × 10−4 | |
| F16 | −1.032 | −1.032 | −1.032 | −1.032 | −1.032 | |
| F17 | 0.398 | 0.398 | 0.398 | 0.398 | 0.398 | |
| F18 | 3.000 | 3.002 | 3.000 | 3.002 | 3.000 | |
| F19 | −3.863 | −3.863 | −3.863 | −3.863 | −3.863 | |
| F20 | −3.322 | −3.326 | −3.203 | −3.231 | 3.322 | |
| F21 | −9.392 | −10.154 | −10.055 | −10.153 | −10.536 | |
| F22 | −10.403 | −10.403 | −10.403 | −10.403 | −10.403 | |
| F23 | −10.535 | −10.536 | −10.536 | −10.536 | −10.536 | |
| Complicated | F24 | −959.6407 | −959.6407 | −959.6407 | −959.6407 | −959.6407 |
| F25 | −19.2085 | −19.2085 | −19.2085 | −19.2085 | −19.2085 | |
| F26 | −4.1558 | −4.1558 | −4.1558 | −4.1558 | −4.1558 | |
| F27 | 8.588 × 10−8 | 7.570 × 10−6 | 1.348 × 10−31 | 1.459 × 10−8 | 1.348 × 10−31 | |
| F28 | −8.946 | −6.874 | −9.005 | −8.454 | −9.552 | |
| F29 | 1.48 × 10−199 | 1.248 × 10−5 | 6.92 × 10−110 | 3.275 × 10−64 | 1.94 × 10−179 | |
| F30 | 0.103 | 17.276 | 1.033 × 10−6 | 0.002 | 0.116 |
| Type | Function | GWO | PSO | MFO | SSA | ISSA |
|---|---|---|---|---|---|---|
| High-Dimensional unimodal | F1 | 1.153 × 10−27 | 3.786 × 102 | 2.781 | 2.696 × 10−63 | 9.855 × 10−95 |
| F2 | 8.864 × 10−17 | 18.415 | 38.778 | 7.844 × 10−32 | 1.690 × 10−46 | |
| F3 | 8.906 × 10−6 | 7.740 × 103 | 2.164 × 104 | 2.554 × 10−27 | 3.286 × 10−31 | |
| F4 | 6.657 × 10−7 | 9.728 | 68.5053 | 9.456 × 10−15 | 3.15 × 10−27 | |
| F5 | 0.7904 | 1.687 × 104 | 8.017 × 106 | 8.807 × 10−4 | 1.17 × 10−4 | |
| F6 | 0.6316 | 359.709 | 3.332 × 103 | 5.493 × 10−6 | 7.84 × 10−12 | |
| F7 | 1.900 × 10−3 | 0.987 | 2.730 | 1.700 × 10−3 | 5.774 × 10−4 | |
| High-dimensional multimodal | F8 | −5.74 × 103 | −7.376 × 103 | −4.08 × 103 | −8.48 × 103 | −1.15 × 104 |
| F9 | 2.838 | 1.943 × 102 | 1.578 × 102 | 0 | 0 | |
| F10 | 9.883 × 10−14 | 5.899 | 14.859 | 8.882 × 10−16 | 8.882 × 10−16 | |
| F11 | 0.002 | 3.834 | 30.969 | 0 | 0 | |
| F12 | 0.047 | 5.802 | 639.216 | 2.884 × 10−7 | 4.10 × 10−12 | |
| F13 | 0.706 | 22.964 | 39.506 | 8.27 × 10−6 | 4.40 × 10−12 | |
| Fixed-dimension multimodal | F14 | 3.515 | 1.040 | 1.757 | 5.349 | 1.004 |
| F15 | 0.006 | 0.008 | 0.001 | 4.038 × 10−4 | 3.20 × 10−4 | |
| F16 | −1.032 | −1.032 | −1.032 | −1.032 | −1.032 | |
| F17 | 0.398 | 0.398 | 0.398 | 0.398 | 0.398 | |
| F18 | 5.700 | 3.002 | 3.000 | 3.900 | 3.000 | |
| F19 | −3.862 | −3.860 | −3.863 | −3.863 | −3.863 | |
| F20 | −3.264 | −3.091 | −3.236 | −3.251 | −3.296 | |
| F21 | −9.317 | −9.802 | −8.418 | −8.914 | −10.532 | |
| F22 | −10.225 | −9.706 | −8.762 | −9.163 | −10.397 | |
| F23 | −10.264 | −10.264 | −8.383 | −8.914 | −10.530 | |
| Complicated | F24 | −868.854 | −926.734 | −931.834 | −917.836 | −959.488 |
| F25 | −19.2085 | −18.504 | −20.584 | −19.0125 | −19.2085 | |
| F26 | −4.0326 | −3.7992 | −4.0148 | −4.1288 | −4.1342 | |
| F27 | 4.006 × 10−7 | 1.059 × 10−4 | 1.348 × 10−31 | 7.522 × 10−6 | 1.348 × 10−31 | |
| F28 | −7.854 | −5.729 | −7.796 | −7.981 | −8.011 | |
| F29 | 6.9 × 10−189 | 3.365 × 10−6 | 1.30 × 10−103 | 2.637 × 10−35 | 3.9 × 10−169 | |
| F30 | 8.636 | 152.489 | 9.240 | 10.899 | 7.639 |
| Type | Function | GWO | PSO | MFO | SSA | ISSA |
| High-dimensional unimodal | F1 | 2.942 × 10−27 | 1.708 × 102 | 2.000 | 1.196 × 10−62 | 2.203 × 10−94 |
| F2 | 5.698 × 10−17 | 12.794 | 20.239 | 3.778 × 10−31 | 3.778 × 10−46 | |
| F3 | 1.832 × 10−5 | 5.881 × 103 | 1.124 × 104 | 1.376 × 10−26 | 9.735 × 10−31 | |
| F4 | 5.501 × 10−7 | 2.718 | 7.814 | 5.180 × 10−14 | 1.67 × 10−26 | |
| F5 | 0.7904 | 1.392 × 104 | 3.218 × 107 | 0.001 | 3.82 × 10−4 | |
| F6 | 0.372 | 216.624 | 6.600 × 103 | 1.043 × 10−5 | 2.01 × 10−11 | |
| F7 | 9.494 × 10−4 | 2.723 | 6.149 | 1.400 × 10−3 | 2.239 × 10−4 | |
| High-dimensional multimodal | F8 | 1.036 × 103 | 1.069 × 103 | 8.103 × 102 | 5.312 × 103 | 1.644 × 103 |
| F9 | 4.348 | 30.75 | 33.111 | 0 | 0 | |
| F10 | 1.552 × 10−14 | 0.883 | 6.985 | 0 | 0 | |
| F11 | 0.006 | 1.372 | 49.146 | 0 | 0 | |
| F12 | 0.024 | 3.171 | 3.438 × 103 | 5.684 × 10−7 | 1.53 × 10−11 | |
| F13 | 0.2384 | 14.699 | 77.229 | 1.423 × 10−5 | 7.12 × 10−12 | |
| Fixed-dimension multimodal | F14 | 3.801 | 0.1123 | 1.365 | 5.454 | 1.680 × 10−2 |
| F15 | 0.009 | 0.009 | 0.001 | 2.935 × 10−4 | 2.874 × 10−4 | |
| F16 | 1.802 × 10−8 | 2.250 × 10−5 | 6.775 × 10−16 | 2.003 × 10−5 | 5.04 × 10−16 | |
| F17 | 7.534 × 10−5 | 9.261 × 10−6 | 0 | 3.325 × 10−5 | 0 | |
| F18 | 14.788 | 1.68 × 10−4 | 6.696 × 10−4 | 4.929 | 1.92 × 10−15 | |
| F19 | 0.002 | 0.004 | 0.001 | 6.872 × 10−4 | 2.30 × 10−15 | |
| F20 | 0.091 | 0.181 | 0.059 | 0.059 | 0.052 | |
| F21 | 2.210 | 2.139 | 3.575 | 2.521 | 5.700 × 10−3 | |
| F22 | 0.963 | 1.878 | 3.052 | 2.287 | 0.006 | |
| F23 | 1.481 | 1.250 | 3.386 | 2.520 | 0.013 | |
| Complicated | F24 | 90.299 | 33.497 | 44.750 | 45.879 | 0.835 |
| F25 | 2.241 × 10−5 | 1.231 | 1.426 | 0.746 | 7.58 × 10−15 | |
| F26 | 0.204 | 0.665 | 0.183 | 0.005 | 0.012 | |
| F27 | 3.514 × 10−7 | 1.338 × 10−4 | 6.68 × 10−47 | 1.646 × 10−5 | 6.68 × 10−47 | |
| F28 | 1.129 | 0.838 | 0.909 | 0.809 | 0.781 | |
| F29 | 0 | 4.818 × 10−6 | 7.02 × 10−103 | 1.444 × 10−34 | 0 | |
| F30 | 11.406 | 120.335 | 9.075 | 11.134 | 8.950 |
| Type | Function | GWO | PSO | MFO | SSA | ISSA |
| High-dimensional unimodal | F1 | 500 | 500 | 500 | 500 | 283 |
| F2 | 500 | 500 | 500 | 500 | 408 | |
| F3 | 500 | 500 | 500 | 500 | 452 | |
| F4 | 500 | 500 | 500 | 430 | 287 | |
| F5 | 56 | 500 | 500 | 500 | 34 | |
| F6 | 500 | 500 | 500 | 500 | 500 | |
| F7 | 267 | 383 | 390 | 500 | 172 | |
| High-dimensional multimodal | F8 | 500 | 500 | 190 | 112 | 201 |
| F9 | 500 | 500 | 500 | 72 | 18 | |
| F10 | 368 | 500 | 500 | 278 | 85 | |
| F11 | 180 | 189 | 500 | 64 | 27 | |
| F12 | 500 | 500 | 500 | 500 | 283 | |
| F13 | 500 | 500 | 500 | 500 | 500 | |
| Fixed-dimension multimodal | F14 | 83 | 59 | 29 | 77 | 6 |
| F15 | 500 | 500 | 500 | 500 | 500 | |
| F16 | 4 | 1 | 1 | 2 | 1 | |
| F17 | 115 | 92 | 13 | 28 | 8 | |
| F18 | 36 | 73 | 38 | 8 | 6 | |
| F19 | 199 | 90 | 17 | 24 | 7 | |
| F20 | 196 | 500 | 500 | 17 | 8 | |
| F21 | 434 | 202 | 32 | 423 | 7 | |
| F22 | 298 | 500 | 46 | 448 | 10 | |
| F23 | 457 | 266 | 47 | 500 | 29 | |
| Complicated | F24 | 35 | 500 | 22 | 500 | 13 |
| F25 | 24 | 8 | 32 | 3 | 1 | |
| F26 | 40 | 7 | 80 | 15 | 12 | |
| F27 | 500 | 500 | 172 | 116 | 500 | |
| F28 | 500 | 500 | 151 | 390 | 137 | |
| F29 | 500 | 500 | 500 | 500 | 500 | |
| F30 | 500 | 500 | 500 | 500 | 500 |
| Type | Function | SSA | ISSA |
|---|---|---|---|
| Mean Running Time/s | |||
| High-dimensional unimodal | F1 | 0.2940 | 0.1937 |
| F2 | 0.3895 | 0.3963 | |
| F3 | 0.5226 | 0.5129 | |
| F4 | 0.3578 | 0.3485 | |
| F5 | 0.3872 | 0.3439 | |
| F6 | 0.3287 | 0.3443 | |
| F7 | 0.4786 | 0.4425 | |
| High- dimensional multimodal | F8 | 0.4175 | 0.4132 |
| F9 | 0.3989 | 0.3911 | |
| F10 | 0.3848 | 0.4037 | |
| F11 | 0.4194 | 0.4225 | |
| F12 | 0.3849 | 0.3389 | |
| F13 | 0.3525 | 0.3361 | |
| Fixed-dimension multimodal | F14 | 0.7484 | 0.7105 |
| F15 | 0.1920 | 0.1474 | |
| F16 | 0.1886 | 0.1810 | |
| F17 | 0.1816 | 0.1721 | |
| F18 | 0.1802 | 0.1699 | |
| F19 | 0.2076 | 0.2157 | |
| F20 | 0.2108 | 0.2434 | |
| F21 | 0.2526 | 0.2298 | |
| F22 | 0.2396 | 0.2694 | |
| F23 | 0.2562 | 0.2964 | |
| Complicated | F24 | 0.1832 | 0.1694 |
| F25 | 0.1834 | 0.1681 | |
| F26 | 0.2570 | 0.2865 | |
| F27 | 0.1862 | 0.1754 | |
| F28 | 0.3598 | 0.3436 | |
| F29 | 0.1931 | 0.1886 | |
| F30 | 1.1782 | 1.2938 | |
| Algorithm | Parameters | ||
|---|---|---|---|
| KP | KI | KD | |
| PID | 6268.17706 | 0.02636 | 17,635.79 |
| Fuzzy-PID | 4224.04676 | 0.00533 | 31,417.79 |
| ISSA-PID | 6376.42771 | 0.00236 | 95,854.56 |
| PSO-PID | 2191.85053 | 0.00643 | 20,052.97 |
| GWO-PID | 1349.69954 | 0.00666 | 20,589.11 |
| SSA-PID | 3573.95374 | 0.00578 | 58,089.41 |
| MFO-PID | 2362.61431 | 0.00637 | 21,615.32 |
| Algorithm | Performance Index | |||
|---|---|---|---|---|
| Maximum Overshoot (%) | Peak Time (s) | Stable Time (s) | Steady-State Error (%) | |
| PID | 58.2 | 17.1 | 290.57 | 98.9 |
| Fuzzy-PID | 40.1 | 19.8 | 209.16 | 99.1 |
| ISSA-PID | 18.7 | 14.6 | 92.8 | 99.4 |
| PSO-PID | 36.5 | 32.8 | 228.96 | 98.2 |
| GWO-PID | 25.9 | 34.7 | 284.88 | 97.3 |
| SSA-PID | 22.8 | 35.8 | 117.80 | 98.9 |
| MFO-PID | 36.6 | 29.2 | 219.20 | 98.3 |
| Algorithm | Performance Index | |||
|---|---|---|---|---|
| Maximum Overshoot (%) | Peak Time (s) | Stable Time (s) | Steady-State Error (%) | |
| PID | 15.7 | 18.2 | 285.4 | 99.2 |
| Fuzzy-PID | 10.8 | 18.2 | 137.4 | 99.2 |
| ISSA-PID | 4.8 | 17.5 | 57.7 | 99.4 |
| PSO-PID | 9.2 | 30.6 | 362.9 | 98.5 |
| GWO-PID | 5.5 | 43.9 | - | 97.3 |
| SSA-PID | 5.9 | 21.3 | 144.5 | 98.9 |
| MFO-PID | 9.4 | 29.9 | 340 | 98.7 |
| Algorithm | Recovery Time (s) |
|---|---|
| PID | 210.9 |
| Fuzzy-PID | 223.1 |
| ISSA-PID | 114.2 |
| PSO-PID | 295.2 |
| GWO-PID | - |
| SSA-PID | 125.0 |
| MFO-PID | 284.2 |
| Algorithm | Performance Index | |||
|---|---|---|---|---|
| Maximum Overshoot (%) | Peak Time (s) | Stable Time (s) | Steady-State Error (°C) | |
| Z-N | 0.24 | 24.1 | 165.1 | 0.4356 |
| Fuzzy-PID | 0.21 | 24.8 | 189.9 | 0.7678 |
| ISSA-PID | 0.10 | 21.0 | 68.2 | 0.1987 |
| PSO-PID | 0.14 | 20.0 | 172.3 | 0.3149 |
| GWO-PID | 0.31 | 21.6 | 160.1 | 0.7621 |
| SSA-PID | 0.12 | 21.0 | 70.2 | −0.2587 |
| MFO-PID | 0.10 | 22.5 | 77.3 | 0.8362 |
| Algorithm | Recovery Time (s) | Steady-State Error (°C) |
|---|---|---|
| Z-N | 392.9 | 2.128 |
| Fuzzy-PID | 397.0 | 1.360 |
| ISSA-PID | 250.3 | 0.952 |
| PSO-PID | 423.0 | 1.032 |
| GWO-PID | 411.2 | 1.385 |
| SSA-PID | 427.6 | 0.803 |
| MFO-PID | 381.7 | 1.923 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, M.; Wang, Y.; Wu, F.; Lin, Y. Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm. Processes 2023, 11, 1302. https://doi.org/10.3390/pr11051302
Ouyang M, Wang Y, Wu F, Lin Y. Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm. Processes. 2023; 11(5):1302. https://doi.org/10.3390/pr11051302
Chicago/Turabian StyleOuyang, Mingsan, Yipeng Wang, Fan Wu, and Yi Lin. 2023. "Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm" Processes 11, no. 5: 1302. https://doi.org/10.3390/pr11051302
APA StyleOuyang, M., Wang, Y., Wu, F., & Lin, Y. (2023). Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm. Processes, 11(5), 1302. https://doi.org/10.3390/pr11051302